基于FPGA的運動補償實現方法
2023-09-05 01:52:20楊敏
艦船電子對抗 2023年4期
關鍵詞:信號
楊 敏
(中國電子科技集團公司第二十研究所,陜西 西安 710068)
0 引 言
艦載雷達系統中,由于運動目標與雷達之間有相對徑向運動,雷達接收到的目標回波信號具有多普勒頻移,使得雷達測量目標的距離與目標所在的真實距離存在一定的誤差,且該誤差隨目標速度提高而增大。因此,需要在脈沖壓縮處理前進行目標運動補償,以獲得目標的真實距離。
傳統運動補償實現多采用CORDIC算法產生補償信號[1],然而CORDIC算法的復雜性使上述方法具有開發難度大、開發周期長的缺陷。隨著近年現場可編程門陣列(FPGA)技術的不斷發展,FPGA的功能已不僅僅是完成復雜的邏輯控制,而是更多地實現各種復雜的算法,工程實現中可運用快速傅里葉變換(FFT)、直接數字合成(DDS)等IP核進行復雜信號處理算法運算,具有靈活配置、高速并行處理的優點,因此在FPGA上實現運動補償、脈沖壓縮算法可以提高系統的實時性能并提高設計人員的開發效率。本文將在FPGA中利用DDS技術產生補償信號實現運動補償,以消除運動目標的多普勒頻移帶來的測距誤差,并對運動補償后脈沖壓縮結果進行驗證與分析。
1 多普勒頻移對測距的影響
當目標相對于雷達的徑向速度為v時,雷達回波信號頻率與發射信號頻率差值為多普勒頻率:
(1)
式中:v為目標與雷達的相對速度,單位為m/s;λ為發射載波的波長,單位為m。
(2)
(3)
2 運動補償
當目標的回波信號具有多普勒頻移時,由于脈沖壓縮匹配濾波器輸出信號的偏移,必然會造成測距誤差,并且測距誤差隨目標速度增大而增大。
2.1 運動補償原理
(4)

2.2 運動補償的MATLAB仿真
設定雷達波形參數為:脈寬T=12 μs,帶寬B=20 MHz,采樣率fs=30 MHz,載波波長λ=0.017 9 m,跟蹤波門為120 m,距離采樣單元為5 m,采樣起始時刻為5 940 m。在距離雷達6 000 m處設置徑向速度v=1 000 m/s的目標,采用MATLAB產生該目標的線性調頻回波信號,并進行運動補償及脈沖壓縮仿真。
(1) 不做運動補償后脈沖壓縮結果如圖1所示。
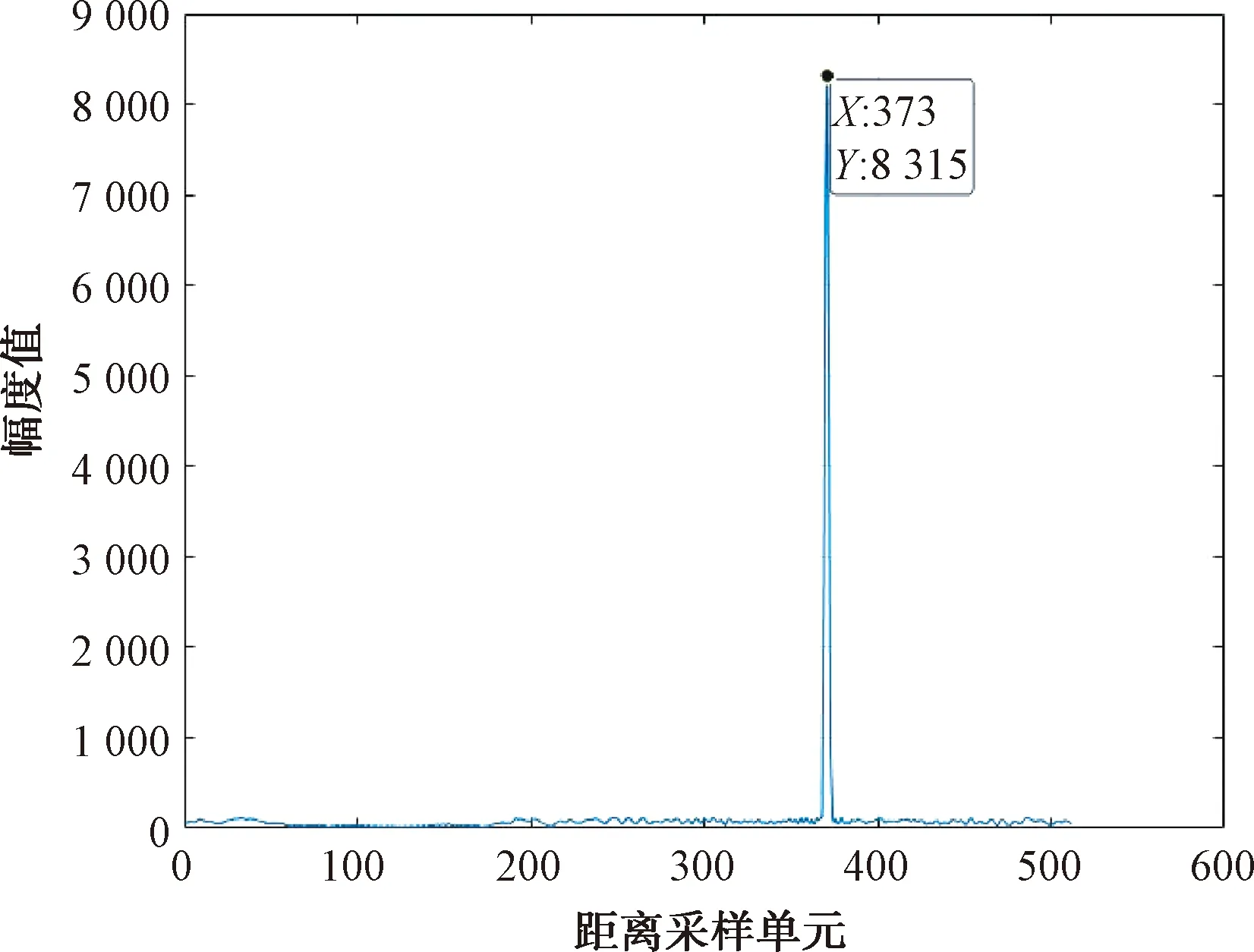
圖1 MATLAB仿真不做運動補償的脈沖壓縮結果
(2) 做運動補償后脈沖壓縮結果如圖2所示。
話雖如此,但康師傅能取得這26年的迅速發展,贏得無數國民的信賴,企業本身的專注、努力和積極履行社會責任也是關鍵。
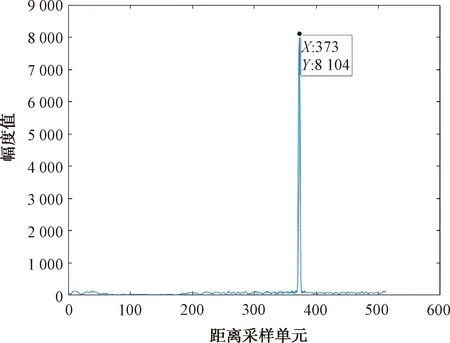
圖2 MATLAB仿真做運動補償的脈沖壓縮結果
圖2中目標峰值所在距離采樣單元為373,與圖1比較,回波信號的脈沖壓縮峰值位置相對實際超前2個距離采樣單元,因此檢測距離誤差為10 m,與上述Δs一致。根據圖2計算目標檢測距離s=(373-T×fs-1)×5+5 940,經計算此時檢測距離為6 000 m,與實際目標距離一致,即經過運動補償后,成功消除由動目標多普勒頻移引起的測距誤差。
2.3 運動補償的FPGA實現
2.3.1 實現方案
FPGA可利用DDS技術直接合成所需頻率的正、余弦信號與輸入信號相乘實現頻譜搬移。本文基于FPGA實現運動補償方法的核心,即使用DDS IP核產生補償信號f(t)對應的正、余弦信號,具體運動補償實現方案如圖3所示。
(1) 根據系統下發參數計算多普勒頻率fd,并將fd送入配置參數計算模塊,計算DDS IP核配置參數;
(2) 使用配置參數配置DDS IP核后,DDS IP輸出補償信號f(t);
(3) 補償信號f(t)與目標回波S′(t)進行復數相乘,并將相乘結果送至脈沖壓縮模塊,進行后續脈沖壓縮計算。
2.3.2 DDS產生補償信號
(5)
式中:N=2n,n為DDS IP核設置精度。
在運動補償算法實現中,使fout=fd,根據式(3)計算Δθ,則:
(6)
式(6)計算得到的Δθ即為DDS IP核配置參數,將Δθ送至DDS IP核配置接口完成DDS IP核配置后,DDS IP核輸出與fd相應的補償信號。
2.3.3 FPGA實現的驗證
FPGA實現運動補償算法的驗證過程如圖4所示。
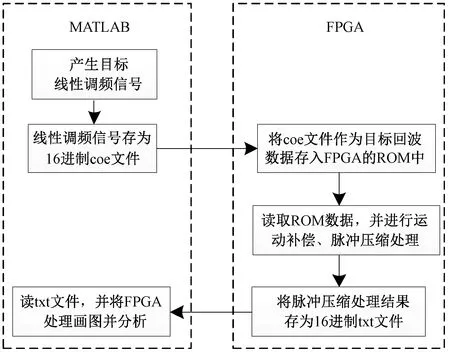
圖4 運動補償的FPGA仿真驗證過程
(1) 設定雷達波形及目標參數與本文第2.2小節“運動補償的MATLAB仿真”中保持一致,采用MATLAB產生目標的線性調頻信號,并將產生的線性調頻信號存為16進制的coe格式文件;
(2) FPGA將coe文件存入片內只讀存儲器(ROM)后,讀取ROM數據進行運動補償及脈沖壓縮仿真,并將仿真結果存為txt文件;
(3) 采用MATLAB讀取txt文件數據,對數據進行格式轉換后將FPGA仿真得到的脈沖壓縮結果繪圖,如圖5所示;
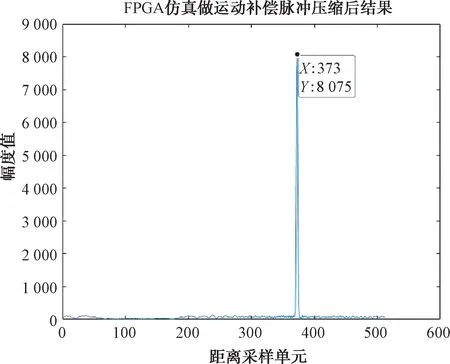
圖5 FPGA仿真做運動補償的脈沖壓縮結果
(4) 圖5所示目標峰值所在距離采樣單元為373,則目標檢測距離s=(373-T×fs-1)×5+5 940,經計算此時檢測距離為6 000 m,與實際目標距離一致,由此說明FPGA實現運動補償算法有效地消除了目標多普勒頻移帶來的測距誤差。
3 結束語
通過理論計算及MATLAB仿真,驗證了采用運動補償消除目標多普勒頻移造成測距誤差的有效性,在此基礎上設計運動補償算法的FPGA實現方案,通過FPGA與MATLAB聯合仿真驗證了基于FPGA的運動補償實現方法可行、有效,在工程實現中為雷達系統提高測距精度提供了一種高效、快捷的解決方案。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
