多規則約束條件下的船舶實時避碰算法研究
2023-09-01 13:13:36張哲
艦船科學技術 2023年14期
張 哲
(武漢交通職業學院 船舶與航運學院, 湖北 武漢 430065)
0 引 言
船舶避碰策略決定了船舶航行的安全性,傳統的船舶避碰決策往往依賴于船舶工作人員的經驗知識,受人為因素干擾較大,缺乏規則化和流程化的避碰決策體系。隨著船舶數量和噸位的增加,海上航行交通環境越來越多變,船舶的操縱難度越來越大,僅僅依靠工作人員的經驗已經無法滿足復雜交通情況下的船舶避碰,因此需要進行船舶避碰決策的規范化、功能化。
本文的研究重心是船舶在多種規則約束下的實時避碰算法,通過系統分析船舶航行過程的避碰需求,建立船舶航行與會遇過程的數學模型,結合電子海圖等現代化船舶導航工具[1],確定了多規則約束下的船舶避碰策略,取得了良好效果。
1 多規則約束下的船舶實時避碰系統的整體設計
本文結合船舶導航與控制硬件設備,從船舶實時避碰的需求出發,建立一種多規則約束條件下的船舶實時避碰系統。
該系統按照功能模塊可以分為控制層、決策層和執行層3 個部分,實時避碰控制系統的用戶利用局域網向3 個層次結構的硬件單元發送指令信息,圖1 為船舶實時避碰控制系統的功能框架。
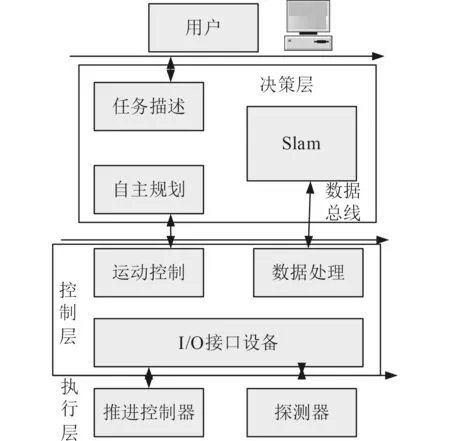
圖1 船舶實時避碰控制系統的功能框架Fig. 1 Functional framework of ship real-time collision avoidance control system
1)決策層
本文開發的船舶實時避碰系統決策層包括任務描述、自主規劃、SLAM 等功能模塊,決策層接收來自用戶的指令,是船舶避碰控制的核心[2]。
① 任務描述:將來自用戶或機艙的指令進行參數配置的轉化,并建立任務模型,是船舶避碰控制策略制定的前提。
② 自主規劃:該模塊基于船舶的避碰控制算法,通過分析任務模型和船舶狀態數據、航行環境參數,對船舶的航向進行自主的規劃。
③ SLAM 模塊:該模塊基于船舶自身配置的傳感器單元,在控制系統中搭建避碰障礙物的分布模型,并分析本船與障礙物之間的相對分布位置。
2)控制層
控制層是實現船舶避碰的關鍵,主要由避碰系統的控制主機和I/O 等設備組成,可以實現的功能包括:
① 運動控制。控制層發出的控制指令由執行層接收,這些控制指令包括船舶的航行速度調節、航向改變等,從而控制船舶的運動[3]。
② 數據分析。控制層的主機具有較高的數據處理能力,結合高性能主機芯片,可以對船舶傳感器采集的數據進行分析、融合處理,并通過數據總線將分析后的數據傳遞給系統的其他單元。
③ 設備驅動。控制層的設備驅動功能包括各類I/O 端口設備、USB 設備、總線設備等,保障系統數據傳輸的通暢。
3)執行層
船舶實時避碰系統的執行層主要包括推進控制器和探測器2 個部分。
① 推進控制器。推進單元將來自控制層的船舶航行速度指令轉化為電機的轉速信號,將控制層的航行方向信號轉化為舵角的控制信號,從而實現船舶的運動控制。
② 探測器。包括船舶的各類速度、加速度、位置傳感器等,協助船舶避碰控制系統進行各類實時參數的采集。
2 多規則約束條件下的船舶實時避碰系統開發
2.1 船舶實時避碰的數學建模
影響船舶碰撞事故發生的因素很多,通常可以分為靜態參數和動態參數2 種。其中,靜態參數主要是指船舶的長、寬、海上風浪條件等;動態參數主要是指船舶動態的航行速度、方向、會遇角度等隨時間改變的參數。
在船舶實時避碰控制過程分析時,將避碰過程分解為以下環節:
1)會遇階段。船舶以一定的會遇角度在區域內相遇,這個階段避碰控制系統的主要工作是采集會遇過程的動態參數和靜態參數;
2)避碰決策階段。通過分析兩船會遇的角度、安全距離、動態參數,對兩船的避撞風險進行評估,并發送避碰控制指令。
3)執行階段。船舶動力系統接收決策指令,進行避碰運動。
建立船舶避碰過程的數學模型如圖2 所示。
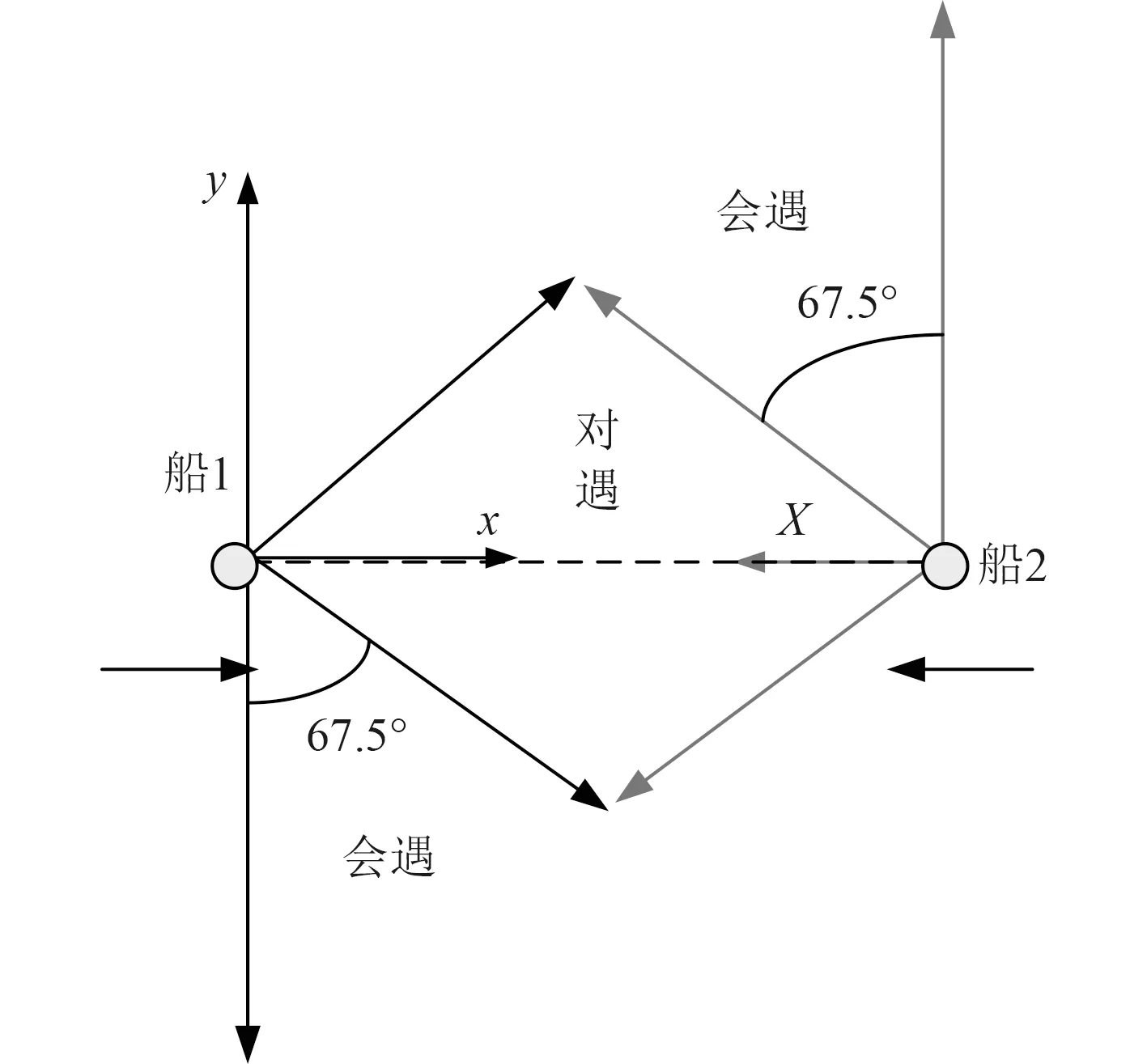
圖2 船舶避碰過程的數學模型Fig. 2 Mathematical model of ship collision avoidance process
船舶避碰過程的參數建模如下:
1)速度模型
包括本船和會遇船舶的速度模型,分別為:
會遇目標的速度模型為:
式中:Vox、Voy為 本船在2 個坐標軸方向的速度分量,Co為當前船舶航行方位角,VTX、VTY為會遇目標在2 個坐標軸方向的分量,CT為目標船舶航行方位角。
2)相對速度模型
根據方向矢量的計算公式,建立會遇過程的相對速度的大小為:
方向為:
3)距離模型
4)會遇角度
式中,α1、α2分別為本船和目標船舶的舵角。
5)安全距離和會遇時間
2.2 船舶避碰系統的多規則約束條件
海上船舶的實時避碰過程并不是簡單的會遇問題,在進行船舶避碰控制時還需要綜合考慮多種因素,這些因素就是避碰控制系統的多規則約束條件。
1)航向保持性指標
航向保持性是指船舶避碰控制系統操縱船舶在一定航向上的直線行駛能力,可用航向偏差角度表示:
θt為t時刻的航向角, θ為設定的航向角。
2)航向偏差平滑度
航向偏差平滑度是指一段時間內的航向偏差之和,偏差越大,變化的幅度越大,對應的平滑度指標越大,用下式計算:
3)路徑點偏離度
指船舶航跡偏離某路徑點(拐點)的程度,當船舶經過某路徑點(拐點)時[4],一般不會直接經過該路徑點,而是以該路徑點為中心,航跡沿某一半徑展開,此時,路徑點的偏離度就可以用該最小半徑表示,如圖3 所示。
船舶單路徑點偏離度表示為:
當路徑點為n個時,多路徑偏離點的計算公式為:
2.3 基于電子海圖的多規則船舶避碰路徑建模技術
針對多規則下的船舶實時避碰控制策略,本節基于電子海圖矢量數據,進行船舶避碰路徑規劃的建模與測試[5]。
首先基于船舶與目標碰撞數學模型,建立基本的船舶避碰操作規則圖如圖4 所示。
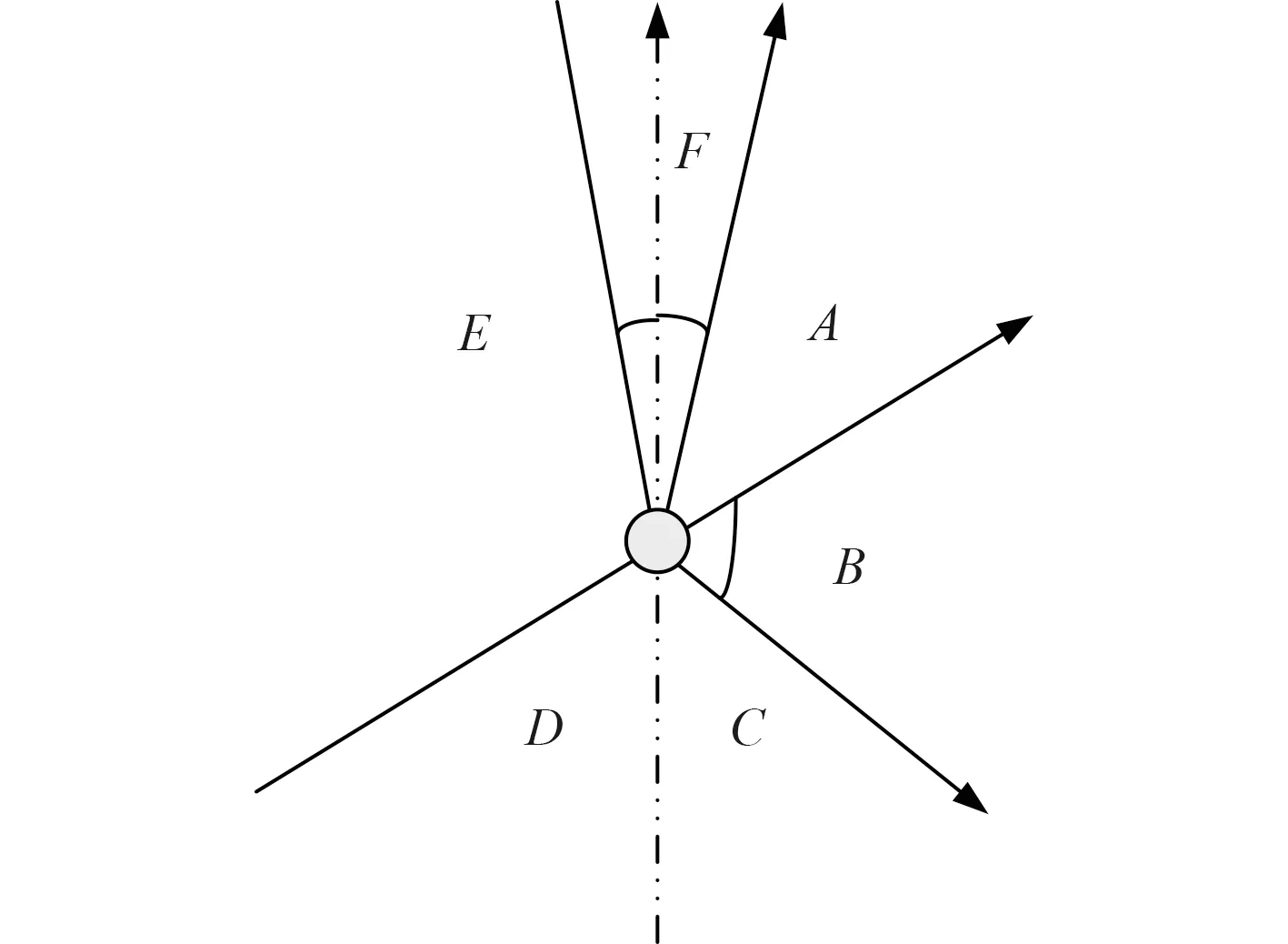
圖4 基本的船舶避碰操作規則圖Fig. 4 Basic operational rules for ship collision avoidance
可知,將船舶周圍海域按照避碰規則劃分為如下區域:
1)F、A 區域:該區域的目標障礙物存在時,本船需要采用向右避碰的措施,避開該區域的船舶或障礙物。
2)B 區域:該區域障礙物存在時,不影響本船的航行狀態。
3)C、D 區域:該區域的目標需要分析其航行速度,如果速度大于本船,需要調整本船航行速度;如果低于本船,則無碰撞風險。
4)E 區域:該區域障礙物同樣不存在碰撞事故的風險。
在電子海圖中設定船舶避碰控制區域為:
建立二維矢量圖并通過經度坐標[a,b]和緯度坐標[c,d]將該區域進行劃分,對應的船舶和目標障礙物可用(xi,yi)表示,對應的坐標為:
然后對二維圖形的節點ai j(xi,yi)進行插值,得到節點集合為 [T],在集合 [T]中選取3 個障礙物a、b、c 的坐標為A(x1,y1)、B(x2,y2)、C(x3,y3),坐標存在關系為:
最后,基于前文所述的避碰策略和路徑偏離度?θ、航向平滑度等多種約束條件,進行船舶的避碰路徑規劃[6]。
圖5 為電子海圖中船舶多規則約束下的避碰路徑規劃示意圖。可知,在電子海圖中存在障礙物,結合船舶實時避碰算法,在電子海圖規劃的路徑如圖中軌跡線,具有較好的避碰效果。
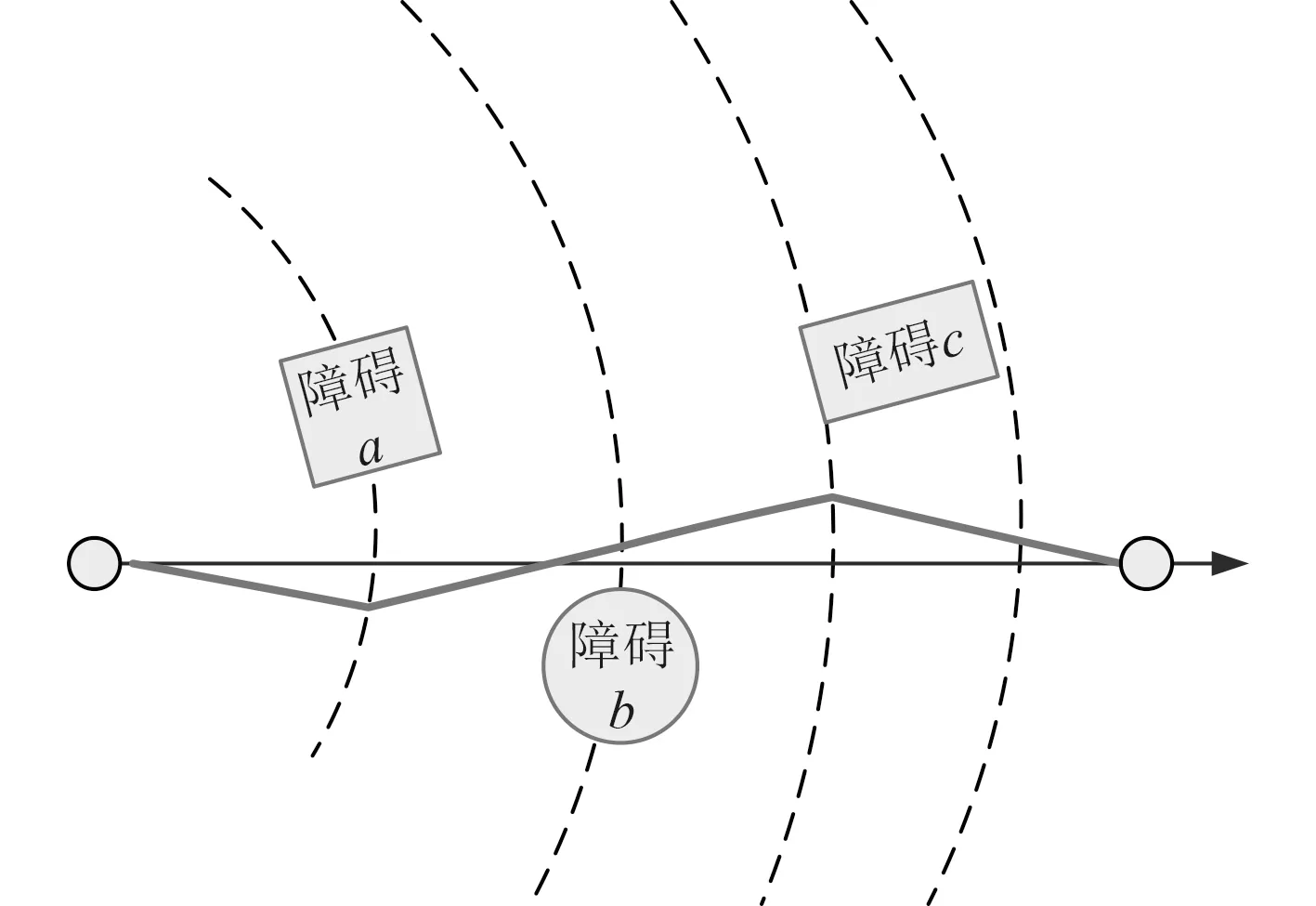
圖5 電子海圖中船舶多規則約束下的避碰路徑規劃示意圖Fig. 5 Schematic diagram of collision avoidance path planning under multiple rules of ship in electronic chart
3 結 語
海上船舶的避碰控制對于船舶航行安全性有重要意義,本文結合船舶避碰過程的數學模型,開發一種船舶實時避碰系統,并針對系統的避碰策略,在電子海圖中進行避碰路徑規劃仿真。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
船舶(2021年4期)2021-09-07 17:32:22
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
