艦船尾跡光學信號異常特征貝葉斯識別方法
2023-09-01 13:13:38岳莉
艦船科學技術 2023年14期
岳 莉
(長春大學 計算機科學技術學院,吉林 長春 130022)
0 引 言
艦船在海上航行時,其尾部會出現長長的尾跡,通過研究艦船尾跡光學特征可判斷當前艦船航行速度以及位置等信息,其是海上防御領域重點關注的問題之一[1]。目前在艦船航行研究領域,可依據艦船尾跡光學信號,判斷海上航行的艦船航速異常情況,為艦船航行管理提供有效的速度控制依據[2]。黃子亮等[3]研究艦船尾跡紅外仿真方法。該方法通過采集艦船航行尾跡紅外圖像后,以該圖像作為基礎,利用MODTRAN 軟件建立艦船航行海上環境和艦船模型,以仿真的方式識別艦船尾跡光學信號異常特征。趙婷等[4]以圖像處理方式對艦船尾跡進行檢測,獲得艦船尾跡光學信號異常特征。上述2 種方法雖然均可以實現艦船尾跡光學信號異常特征識別,但二者未對艦船尾跡圖像進行增強處理,因此在艦船尾跡光學信號特征提取精度上均欠佳。貝葉斯是一種統計學的分類算法,該算法可依據概率對目標進行分類,其運算較為簡單,且分類準確率較高。在此以貝葉斯分類算法作為基礎,提出艦船尾跡光學信號異常特征貝葉斯識別方法,以提升艦船尾跡光學信號異常特征識別技術水平。
1 艦船尾跡光學信號異常特征識別
1.1 基于圖像分割的艦船尾跡圖像增強處理
利用合成孔徑雷達系統采集的原始艦船尾跡SAR圖像內,艦船尾跡與其周圍海上雜波灰度特性區分不夠清晰,導致轉換后的艦船尾跡直方圖精度不足,影響后續艦船尾跡光學信號異常特征識別精度,為此需對艦船尾跡SAR 圖像進行增強處理,使艦船尾跡和雜波特性對比更加顯著。在此利用歸一化的Hough 變換檢測方法實現艦船尾跡圖像增強,其詳細過程如下:
假設艦船尾跡排除艦船位置和尾跡末端,其周圍直線像素服從概率模型分布,則可將需要增強的艦船尾跡位置[5]使用Hough 變換檢測方法映射到θ?ρ平面內,在該平面內艦船尾跡值是尾跡所在直線內像素的均值。令Q(x)表示海平面雜波的像素灰度值,計算公式如下:
式中:f(x)表示海平面雜波x的像素灰度概率分布模型,d表示求導符號。Con為尾跡直線和其他直線對比度系數,分為亮尾跡和暗尾跡。
計算在亮尾跡時[6],艦船尾跡直線和其他直線對比度系數:
式中,Nw表示艦船真實尾跡位置的像素數量;Nc表示艦船尾跡直線位置海雜波位置像素數,μw表示艦船尾跡位置的灰度均值。
在暗尾跡時,艦船尾跡直線和其他直線對比度系數計算公式如下:
以式(1)-式(2)為基礎,對艦船尾跡區域對比度進行增強處理,表達公式如下:
式中,Conc、Cond分別表示艦船亮尾跡和暗尾跡區域對比度增強因子。
式( 4 ) 和式( 5 ) 相加獲得Conz=Cona+Conb,即可實現艦船明暗尾跡圖像的同時增強。
1.2 基于氣泡運輸方程的尾跡光學信號特征提取
以增強后的艦船尾跡SAR 圖像為基礎,提取艦船航跡光學信號直方圖。艦船尾跡由光學氣泡形成[7],為方便獲得艦船尾跡的光學信號特征,需要將艦船尾跡SAR 圖像轉換成直方圖,其過程如下:
在艦船尾跡內,氣泡分布情況受時間、尺度、速度等因素影響,艦船尾跡氣泡大多數為圓形氣泡,為便于運算,將艦船尾跡氣泡均看做是圓形氣泡,且單獨的氣泡在運動過程中不受其他氣泡影響。令ψ表示艦船尾跡氣泡運輸函數;r、v、c、t分別表示氣泡位置、速度、尺度和時間矢量,則艦船尾跡氣泡運輸方程表達公式如下:
式中,Z3r、Z3v、Zc分別表示氣泡位置、速度和尺度范圍。
依據公式(6)可獲得艦船尾跡氣泡特征曲線,提取其中艦船尾跡光學信號特征,其過程如下:
在艦船尾跡直方圖內,直方圖的峰值點分布的密集程度是艦船尾跡區域和海水背景區域的比值,該比值即為艦船尾跡光學信號特征[8]。從視覺上可以觀察艦船尾跡為三角形向外分布,其會出現3 個明顯的峰值點,分別用τ1、τ2、τ3表示3 個艦船尾跡峰值點,則峰值點密集程度計算公式如下:
式中, ?τ表示峰值點密集程度。
令Ci表示艦船尾跡區域和海水背景像素灰度均值比值,其計算公式如下:
式中,Fj表示海水背景區域像素點灰度值;S表示海水區域像素點總數。
公式(8)結果即為艦船尾跡光學信號特征。由此利用信號特征,實現特征識別。
1.3 基于貝葉斯分類的艦船尾跡光學信號異常特征識別
將艦船尾跡光學信號特征Ci作為輸入,利用貝葉斯分類算法識別艦船尾跡光學信號異常特征。貝葉斯分類算法是依據艦船尾跡光學信號特征分布密度進行聚類,可將正常信號和異常信號劃分出來,實現艦船尾跡光學信號異常特征識別。
假設艦船尾跡光學信號特征滿足高斯分布,按照高斯分布理論,令λ和ζ分別表示艦船尾跡光學信號特征的高斯分布均值和協方差。在貝葉斯分類算法模型內,每一個高斯過程均是由均值函數和協方差函數組成,則貝葉斯分類算法模型表現形式如下:
式中:G(·)表示高斯過程函數;f(x)表示貝葉斯分類算法模型。
貝葉斯分類算法模型中,當艦船尾跡光學信號特征Ci為異常特征ε時,滿足下式:
式中:p(·)表示獨立高斯分布函數; ?表示艦船尾跡光學信號特征總數;σ2表示方差。
以式(10)為基礎,以似然分布形式表示艦船尾跡光學信號特征的聯合分布:
式中:y表示艦船尾跡光學信號特征觀測集合;R?表示輸入的艦船尾跡光學信號特征集合內元素正態分布;R??表示艦船尾跡光學信號特征矩陣。
依據公式(11),則艦船尾跡光學信號異常特征識別結果表達公式如下:
利用公式(12)即可得到艦船尾跡光學信號異常特征識別結果。然后設置艦船尾跡光學信號異常特征上限和下限閾值,當艦船尾跡光學信號異常特征分別高于上限閾值和低于下限閾值時,說明此時艦船航行出現過高或過低異常,由此完成艦船尾跡光學信號異常特征識別。
2 實驗分析
以某海域艦船作為實驗對象,使用本文方法對該海域艦船尾跡光學信號異常特征進行識別,得到艦船航行速度異常。艦船模型水線是 701 mm×66 mm,吃水深度為31.8 mm。旋槳驅動為雙軸四葉螺旋槳, 螺旋槳軸距為32 mm,水線垂直距離為23 mm。采集圖像用的合成孔徑雷達頻率為L 波段(1~2 GHz),采用線性天線,脈寬為3.5 μs。分辨率為7.4 m。利用三維渲染引擎OGRE 軟件在主機上基于合成孔徑雷達系統采集的原始艦船尾跡SAR 圖像進行海域場景的動態仿真,獲得場景實時仿真圖像100 張。以一幅本文方法增強預處理的艦船尾跡SAR 圖像作為展示對象,如圖1 所示。
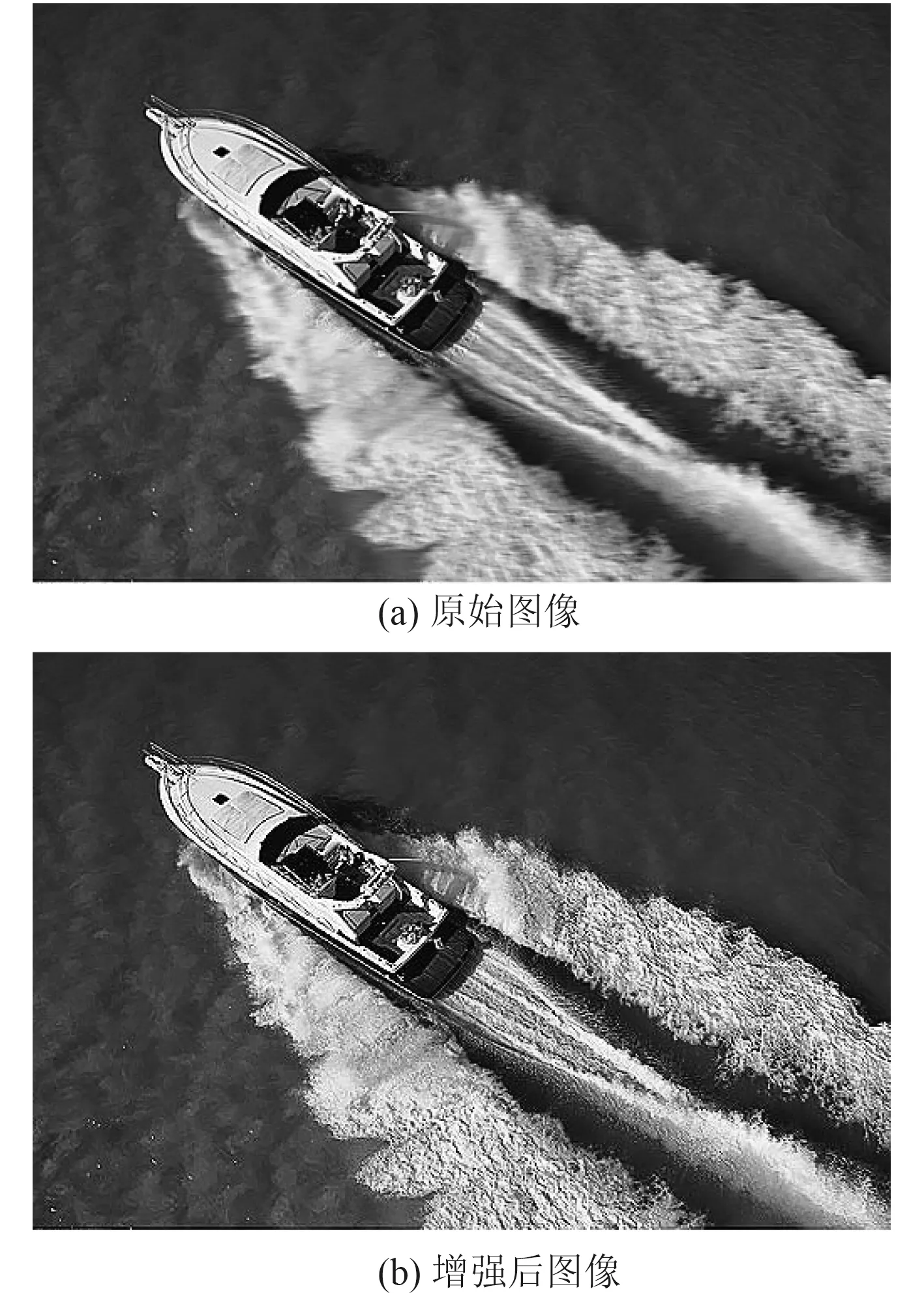
圖1 艦船尾跡SAR 圖像增強處理結果Fig. 1 SAR image enhancement processing results of ship wake
分析可知,原始的艦船尾跡SAR 圖像內艦船尾跡邊界與海面較為模糊,而使用本文方法對該艦船尾跡SAR 圖像進行增強處理后,艦船尾跡與海面交界變得更加清晰,為后續識別艦船尾跡光學信號異常特征提供圖像基礎。
以增強后的艦船尾跡SAR 圖像作為實驗對象,使用本文方法將該圖像轉換成直方圖,轉換結果如圖2 所示。
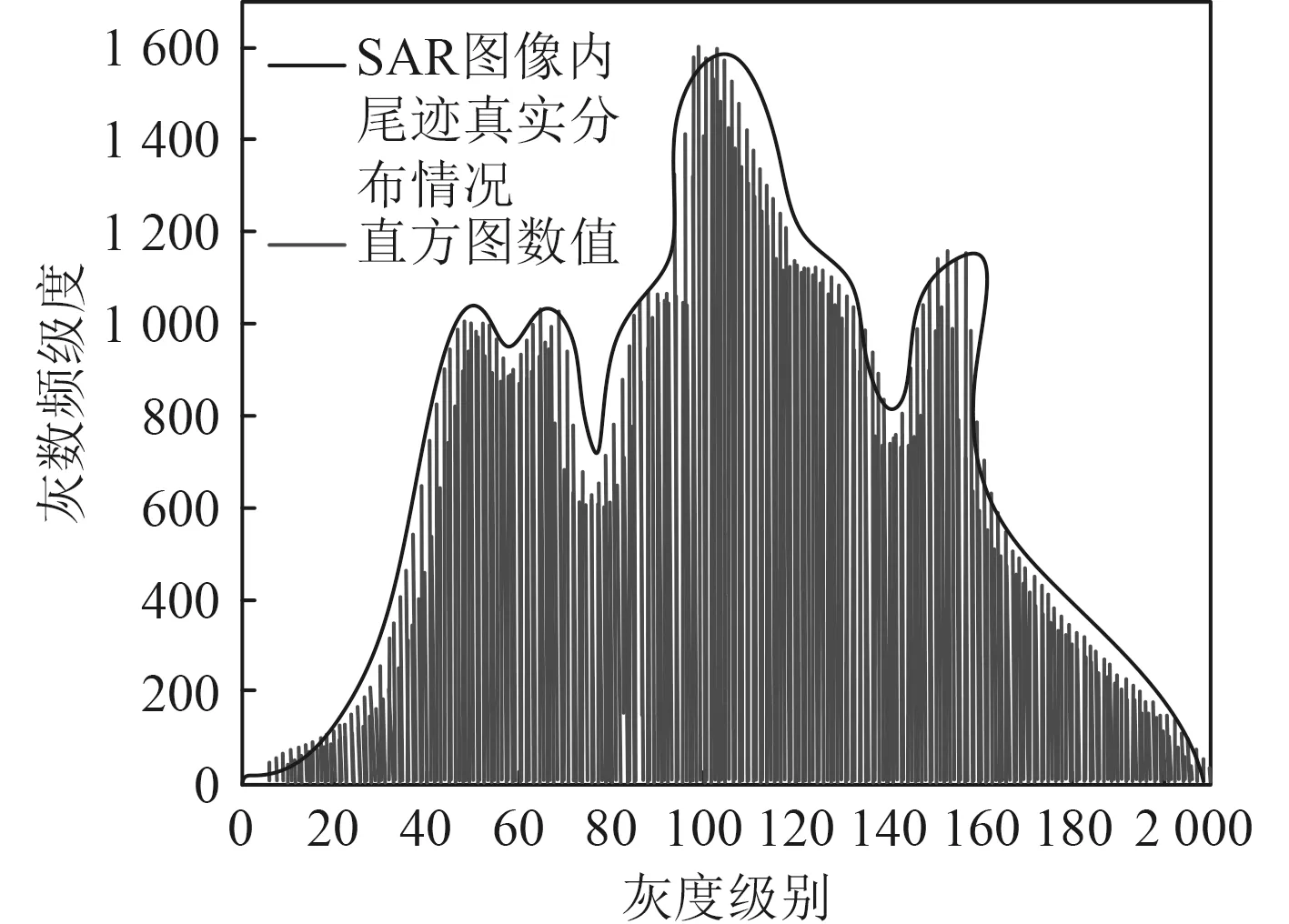
圖2 艦船尾跡SAR 圖像直方圖轉換結果Fig. 2 Histogram conversion results of ship wake SAR image
分析可知,利用本文方法將艦船尾跡SAR 圖像轉換成直方圖,該直方圖內灰度頻數在不同灰度級別時數值不同,但其波動形態與艦船尾跡SAR 圖像內尾跡分布情況較為吻合,頻數差距低于200。上述結果說明:利用本文方法可有效將艦船尾跡SAR 圖像轉換成直方圖。
以10 幅艦船尾跡SAR 圖像作為實驗對象,利用本文方法提取其艦船尾跡光學信號特征,同時設置提取艦船尾跡光學信號特征誤差閾值為0.05,提取結果如表1 所示。
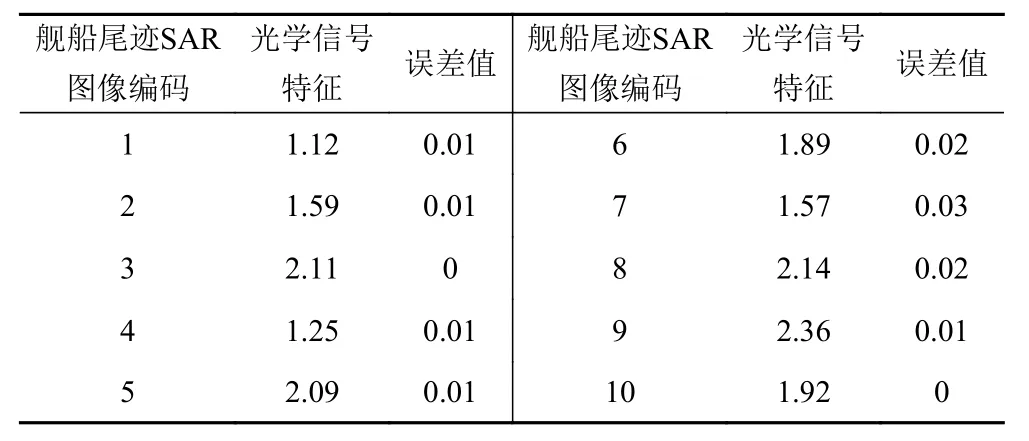
表1 艦船尾跡光學信號特征提取結果Tab. 1 Feature extraction results of ship wake optical signal
分析表1 可知,利用本文方法可有效提取艦船尾跡SAR 圖像內,艦船尾跡光學信號特征,且提取艦船尾跡光學信號特征誤差值最大僅為0.03,低于預設的誤差閾值。上述結果說明:本文方法提取艦船尾跡光學信號特征精度較高,從側面說明本文方法識別艦船尾跡光學信號異常特征能力較好。
利用采集的100 張圖像,使用文獻[3]方法、文獻[4]方法、本文方法分別識別該艦船尾跡光學信號異常特征,識別結果如圖3 所示。
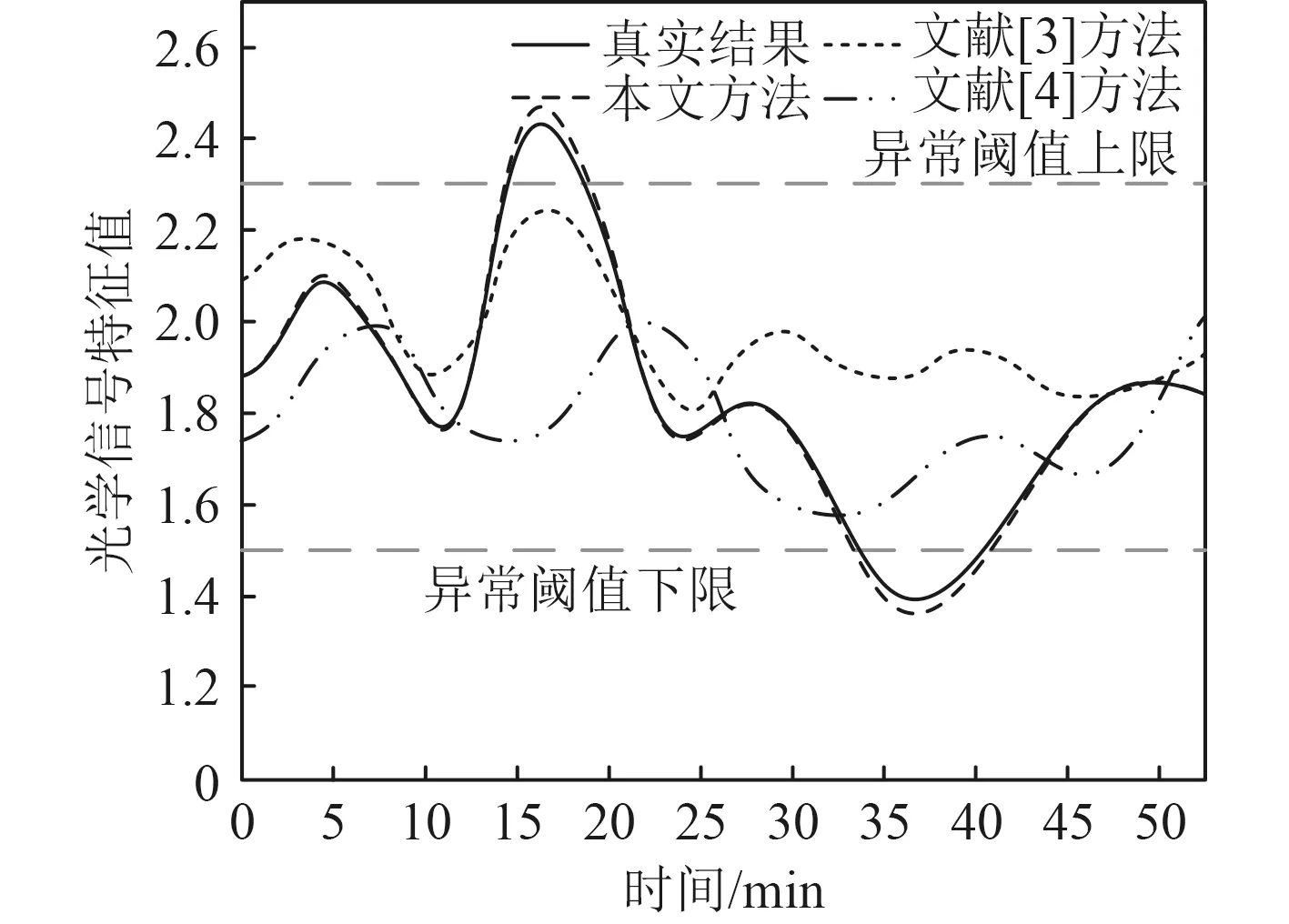
圖3 艦船尾跡光學信號異常特征識別結果Fig. 3 Recognition results of abnormal features of ship wake optical signal
可知,利用本文方法識別該艦船尾跡光學信號異常特征時,其光學信號特征值曲線在時間為15~22 min和34~40 min 時,該艦船光學信號特征分別超過異常閾值上限和異常閾值下限,與實際結果基本相符。而其他2 種方法的識別結果與真實結果相差較大。該結果說明本文方法可有效識別艦船尾跡光學信號異常特征,具備較好的應用效果。
3 結 語
本文提出艦船尾跡光學信號異常特征貝葉斯識別方法,在該方法中利用貝葉斯分類算法實現艦船尾跡光學信號異常特征識別,貝葉斯分類算法可高效準確識別艦船尾跡光學信號異常特征,并經過實驗驗證,本文方法在艦船尾跡SAR 圖像增強、尾跡光學信號特征提取以及異常特征識別方面均具備較好的效果。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
電子制作(2018年11期)2018-08-04 03:25:42
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
