礦用空壓機智能聯控分析
2023-08-31 09:34:30張杰
機械管理開發 2023年7期
張 杰
(山西焦煤西山煤電杜兒坪煤礦, 山西 太原 030022)
0 引言
礦用空壓機是指礦井生產作業中的動力設備,能夠將空氣壓縮至一定壓力后,為風鉆等裝置提供動力。通常來說,依照冷卻方式的不同可將空壓機細分為空冷空壓機以及水冷空壓機,但由于空冷空壓機對現場通風量的要求較高,因此將以水冷空壓機作為主要研究對象,對智能聯控進行分析,具有十分重要的意義。
1 系統整體結構
礦用空壓機智能聯動控制系統,如圖1 所示,是以PLC 作為控制中心,主要結構框架為三層集散,上位機則采用組態軟件來實現動態畫面的遠程控制,而搭載的結構變量能實現上位機對空壓機的智能把控,也可借助故障診斷數據庫完成設備的故障推理。同時系統采用了RS485 總線,促進組態軟件與PLC 之間的通信以及數據傳輸,若上位機與控制及設備相隔距離較大,則通過光纖完成信號的遠距離傳輸,借助兩端的光端機,確保信號及時轉換。并且PLC 能夠將傳感器獲取到的空壓機參數以內部編寫的形式完成計算,之后經RS485 總線傳遞至上位機。
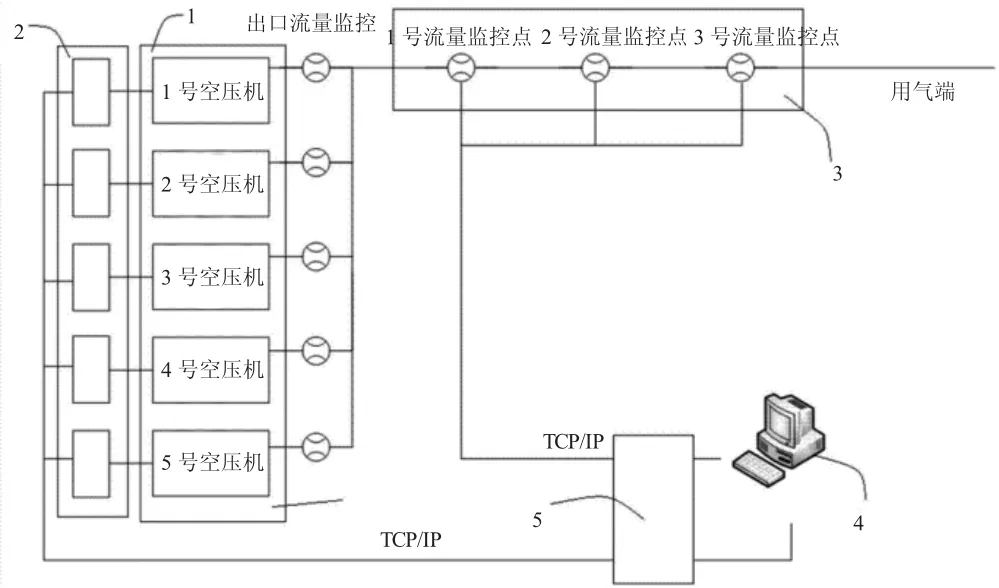
圖1 礦用空壓機智能聯控系統
2 礦用空壓機智能聯控系統探究
2.1 工作原理
水冷空壓機智能聯控系統的控制內容主要包括以下兩點:第一,結合檢測到的空壓機母管壓力值以及設備運行狀態,完成空壓機的自動啟停切換以及變頻調速,確保母管壓力值保持在安全范圍內,實現對氣動裝置的供氣;第二,在進行空壓機的啟停處理中,需要實現冷卻水泵的智能控制,結合實際需求確保空壓機啟動前預先完成冷卻水泵的啟動,使冷卻水能夠流入空壓機冷卻系統,之后再停機處理一段時間,才可停止冷卻水泵的運行。
通常來說空壓機以及冷卻水泵的聯動控制能夠實現空壓機的自動啟停以及加載與卸載,保證空壓機母管的供氣穩定,借助聯動控制系統能夠使設備在可用風量較少時減少負載運行,達到降低電能消耗的目的,延長空壓機使用壽命。空壓機聯動控制系統的工作原理主要是借助壓力傳感器完成母管壓力值的檢測,之后將其與系統的期望壓力值進行比對,找出二者的偏差,若偏差為正,則證明母管壓力值高于期望壓力值,需要通過變頻調速減少空壓機輸出。若偏差為負,則證明母管壓力值低于期望壓力值,此時需要借助變頻調速來提高風壓輸送量。
空壓機的變頻調速控制大多只適用于母管壓力值在一定波動范圍內的調節,而采用的變頻調速方法實現風壓輸出的控制也同樣存在一個上限值與下限值,在此區間能夠實現風量的調節,一旦壓力值高于或低于調節范圍,只能啟動或停止另一臺空壓機來實現控制[1]。
2.2 運行模式
空壓機與冷卻水泵循環系統的結構主要包括:過濾器、進水閥、出水閥、溫度傳感器、循環冷卻水站、水泵,不同的空壓機需要由不同的冷卻水泵完成冷卻水的供給。通常來說,每兩臺空壓機便需要共用一個循環冷卻水站,而外來冷卻水源要經過過濾器過濾處理后,才可流入循環冷卻水站。當空壓機處于正常運行階段,以某地方1 號空壓機作為分析對象,其工作順序為:開啟冷卻水泵,進水閥與出水閥在完全開啟后反饋至控制系統一個限位反饋之后,啟動1 號冷卻水泵電機,待冷卻水流入冷卻循環系統形成回路后,再啟動1 號空壓機并進入延時階段,直至潤滑油溫度達到適宜標準后,才可開始加載。當停止空壓機時,首先要確保空壓機準確執行卸載程序,并在卸載后不可立即完成停機操作,這是因為空壓機在剛卸載時,內部仍存在大量高壓氣體,此類氣體并未排入母管中,一旦出現停機操作,則高壓氣體會滯留在設備當中。在二次啟動空壓機時,實質上屬于帶載荷啟動,容易導致系統掉電,影響空壓機性能與使用壽命,在完成空壓機卸載后,要等待壓力降至安全標準內才可執行停機操作,并在空壓機停機1 min 后停止冷卻水泵電機,直至電機完全停止后,關閉進水閥與出水閥,從而完成整個停機過程。
水冷空壓智能聯控系統的整個控制過程為:空壓機智能聯控系統設備上電,利用安裝在母管上的壓力傳感器完成母管壓力的檢測,并將其與系統設定的壓力值進行比對,若檢測壓力值高于系統設定值,則利用變頻調速降低空壓機螺桿轉速,降低風壓輸出,若達到調節下限,此時母管壓力值仍高于設定值,則需要關閉一臺空壓機,再利用變頻調速,實現壓力恒定。當母管壓力檢測值小于系統設定值,則要利用變頻調速,提高空壓機螺桿轉速,提升風壓輸出,若在變頻調速范圍內仍難以達到設定壓力值,則要利用系統啟動一臺空壓機,確保母管壓力恒定。同時要注意在實現連續控制時,為了確保空壓機能夠得到平衡使用,防止出現單臺空壓機運行時間過長,需要對空壓機起停順序進行把控,確保設備總運行時間相近,以此達到延長空壓機使用壽命的目的。具體方法可分為以下兩點:
1)控制啟停順序,在空壓機聯動控制過程中,至少保證一臺變頻改造后的空壓機,時刻處于運行狀態,借助變頻調速完成母管壓力的調節,而空壓機的啟停順序控制大多采用指針方法,該方法是指當空壓機啟動后,其標志位置為1,證明空壓機已經啟動,在停機過程中,要優先完成該空壓機的停止,若空壓機未啟動,則標志位置為0,下次啟動時則要將啟動標志為0 的空壓機作為優先啟動對象,至于未完成變頻改造的空壓機,其啟動優先級應高于變頻改造后的空壓機,比如當1 號空壓機與4 號空壓機同時運行時,但母管壓力卻低于系統設定值,則要再次啟動一臺空壓機,并將2 號空壓機作為優先啟動對象。
2)運行時間控制,空壓機在處于運行狀態時應當做好單臺空壓機連續時間的把控,確保不同空壓機之間能夠實現啟停切換,防止單臺空壓機出現過長運行時間的情況,避免零部件出現破損,影響空壓機性能以及使用壽命。當出現因空壓機母管壓力值變化,導致設備啟停切換時,每臺空壓機的運行時間大約在兩小時,若每運行0.5 h 則時間計數應當加1,直至2 h后時間計數將為4,此時系統需要控制該空壓機停機,并將時間計數溢出清零,具體的運行順序則應置于最底層,直至下一次啟動。
2.3 PID 控制器
水冷空壓機智能聯控系統采用了模糊PID 控制器,能夠借助擴展的模擬量采集模塊實現壓力傳感器以及溫度傳感器的數據收集,之后通過內部程序實現信號的A/D 處理,并與上位機設定的標準值進行比對,從而找出實際偏差,再借助A/D 轉換完成控制信號的輸出,傳遞至變頻器,以此完成電機轉速以及空壓機風量的調節,保證母管管道恒壓供氣,冷卻水出水恒溫控制[2]。
3 結論
通過對礦用空壓機智能聯控系統的整體結構進行分析討論,闡述該系統的運行原理以及運行方式,確保空壓機智能聯控系統能夠實現多臺空壓機組的集中控制與聯動控制,進一步提高設備的工作質量與效率,減少電能消耗,切實保障礦山的安全生產。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
