基于懸停駐留的大口徑魚雷水下引爆定位控制*
2023-08-30 03:32:16鄭振馬蛟
艦船電子工程 2023年5期
鄭 振 馬 蛟
(中國人民解放軍91129部隊 海口 570311)
1 引言
魚雷作為水下制導武器,在反潛和反艦作戰中發揮重要作用,魚雷的攻擊破壞性較大,在不發動實質攻擊的前提下為提高大口徑魚雷的攻擊對敵攻擊的威懾力,需要在一定的安全距離下實現魚雷引爆,對此需要構建一種優化的大口徑魚雷水下引爆定位控制模型,結合對魚雷對敵目標的深水探測和回波檢測技術,采用聲吶定位裝置,實現對大口徑魚雷水下引爆定位和自動引爆裝置設計。研究相關的大口徑魚雷水下引爆定位控制技術,在優化魚雷的對敵攻擊應用效能方面具有重要意義。
對大口徑魚雷水下引爆定位控制是建立在對整個水下航行階段的運動模型分析技術,構建大口徑魚雷水下引爆定位控制約束參數,采用模糊控制和多維約束參量自適應補償方法,實現對大口徑魚雷水下引爆定位控制優化設計,傳統方法中,對大口徑魚雷水下引爆定位控制方法主要有能量梯度修正的大口徑魚雷的航向校正方法、PID 控制方法和神經元控制方法等,以大口徑魚雷航行的偏航角、俯仰角和橫滾等信息為約束參量,進行魚雷對敵攻擊的曲線修正和反饋跟蹤控制,但傳統方法進行大口徑魚雷水下引爆定位控制的可靠性不好,穩定性不好。針對上述問題,本文提出基于懸停駐留的大口徑魚雷水下引爆定位控制技術。建立大口徑魚雷的水下動力學和運動學模型,以大口徑魚雷航行的偏航角、俯仰角和橫滾等信息為約束參量,采用魚雷運動狀態試驗參數數據辨識水下流體動力參數和系統性能參數,結合參數辨識法建立魚雷動力學輸入輸出響應模型,采用有限元分析方法建立魚雷水下懸停駐留的湍流模型,通過調整魚雷的位置和姿態,結合回波探測技術,采用定位掃描和懸停駐留技術實現魚雷因定位引爆控制。最后進行實驗測試分析,展示了本文方法在提高大口徑魚雷水下引爆定位控制能力方面的優越性能。
2 大口徑魚雷的水下動力學和運動學模型及控制約束參量
2.1 大口徑魚雷的水下動力學和運動學模型構建
為了實現對大口徑魚雷水下引爆定位控制,需要進行大口徑魚雷的運動數學模型分析,構建水下航行階段的縱向運動數學模型,在建立大口徑魚雷的縱向運動模型之前,先做如下幾點基本假設[6]:1)大口徑魚雷的外體結構為剛體模型,其外形關于水平面和水下縱向運動平面的交集坐標系x1Oy1對稱;2)大口徑魚雷的偏航、橫滾及阻尼力等參數滿足線性假設;3)壓載水艙排水并在垂直推進器的作用下上浮實現返航;4)近似認為大口徑魚雷的縱向運動平面坐標系為慣性坐標系。并定義關于大攻角時的流體動力特性的速度坐標系Ox3y3z3、體坐標系Ox1y1z1、大地坐標系Ox2y2z2、球面坐標系Axyz。
根據上述假設,對海底駐留時的流體動力特性進行運動性能參數研究,分別描述為
結合大口徑魚雷水下運動水下駐留涉及的駐留方案、流體動力特性分析,采用特征運動方程得到鉛垂面運動方程為Ox2y2,計算流體力學得到大口徑魚雷繞體坐標系各軸運動的縱向運動數學模型描述為
其中,θ為大口徑魚雷質心的彈道傾角;Mz為流體動力、聲學等各方面的優化目標參數。
通過上述構建的大口徑魚雷的水下動力學和運動學模型,采用魚雷運動狀態試驗參數數據辨識水下流體動力參數和系統性能參數,結合參數辨識法建立魚雷動力學輸入輸出響應模型。
2.2 大口徑魚雷水下引爆定位的約束參量
在上述構建的大口徑魚雷縱向運動數學模型的基礎上,針對海底駐留UUV 低航速、遠航程的特點和要求,采用模型參數匹配,得到海底駐留UUV的外形優化模型參數和跟蹤控制律為
其中,V表示大口徑魚雷質心加速度,m和h分別是大口徑魚雷的轉向約束變量,n是表示航行器頭部豐滿系數。Cm是阻力系數,Iext則表示流體動力布局模式下的水平、垂直鰭舵慣性參數。gNa、gk和gL是魚雷對敵攻擊的偏角、迎角、升阻比,反映了魚雷的有效攻擊區域內的定位參數。VNa、Vk和VL分別表示大口徑魚雷質心的速度、標準彈道平衡參數。由此得到魚雷水下引爆定位動靜力布局效果圖如圖1所示。

圖1 魚雷水下引爆定位動靜力布局效果圖
3 控制方法優化設計與實現
3.1 模糊參數融合和自適應參數調節的路徑規劃
采用魚雷運動狀態試驗參數數據辨識水下流體動力參數和系統性能參數,結合參數辨識法建立魚雷動力學輸入輸出響應模型,進行魚雷水下定位跟蹤控制,本文提出一種基于懸停駐留技術的大口徑魚雷水下引爆定位控制方法。基于運動穩定性特征分析,分析UUV 保持運動狀態的能力,若海底駐留UUV 在受擾動后,隨著時間的增加,能夠恢復到未擾動時的運動狀態,則稱運動是穩定的,否則便是不穩定的。采用Lyapunove 自適應控制律],得到控制輸入輸出參量模型描述為
通過擾動參數分析,得到擾動運動方程組的參考輸入模型為
將大口徑魚雷水下引爆定位控制的非線性系統進行分解,把大口徑魚雷受到的水流和渦流擾動分解為確定部分和不確定部分兩部分,對水平海底和有小傾角海底兩種情況下水流側向流過時UUV的受力特征進行融合分析,得到受力融合模型為
其中,K為海水斜向上的應力參數,xc(t)為慣性力矩,為了便于研究垂推對航行器海底受力特性的影響,本文包括有垂推和無垂推兩種水下航行器模型。對于垂推,本文只考慮垂推幾何因素的影響,不考慮其動力特性,得到擾動方程描述為
其中,x(k)∈Rp表示大口徑魚雷的舵角參考輸入特征狀態,u(k)∈Rq表示大口徑魚雷的俯仰角跟蹤誤差,z(k)∈Rm表示后支撐機構的動力特性參數,A,B,C為適當維數矩陣,基于幾何因素參數調節,得到魚雷的流體動力學參數統計特征量為
其中,P、R為正定矩陣,對于無人水下航行器(UUV)水動力計算這類繞流問題,一般通過建立一個適當的虛擬邊界,將繞流問題轉化為內流問題,在虛擬邊界與UUV形成的空間區域內求解,得到:
根據上述分析,采用魚雷運動狀態試驗參數數據辨識水下流體動力參數和系統性能參數,結合參數辨識法建立魚雷動力學輸入輸出響應模型,實現模糊參數融合和自適應參數調節的路徑規劃。
3.2 大口徑魚雷水下引爆定位優化控制律改進實現
從航行器運動狀態試驗數據中,辨識出流體動力參數和其他表征系統性能的參數的方法稱為參數辨識法,其可以通過研究航行器的輸入輸出響應,或正常航行時的輸入輸出特征量,得到大口徑魚雷水下引爆定位的跟蹤識別的誤差為
采用俯仰參數識別,采用模型參數濾波和PID控制,得到大口徑魚雷水下引爆定位的誤差修正一階求導:
基于誤差擾動抑制,通過懸停駐留的穩態跟蹤控制[11],得到垂推幾何因素約束下的自整定性函數為
其中c1、λ1均大于零,采用Lyapunov 指數求導,采用有限元分析方法建立魚雷水下懸停駐留的湍流模型,通過調整魚雷的位置和姿態,結合回波探測技術,實現魚雷的定位探測,并采用定位掃描和懸停駐留技術實現魚雷因定位引爆控制[12]。
4 仿真實驗與結果分析
為了測試本文設計的控制方法在實現大口徑魚雷水下引爆定位控制的應用性能,進行仿真實驗分析,仿真實驗建立在Matlab Simulink 的大口徑魚雷仿真平臺基礎上,考慮航行器尺寸的限制,變浮力系統的位置被限制在-2.4m~1m 之間,跟蹤角度值為2.8°的正弦信號和階躍信號,大口徑魚雷航行的初始速度為50Kn,航行器著陸時地面坐標系中軸向速度、XY 方向運動的位移隨注水變化的信息表見表1。
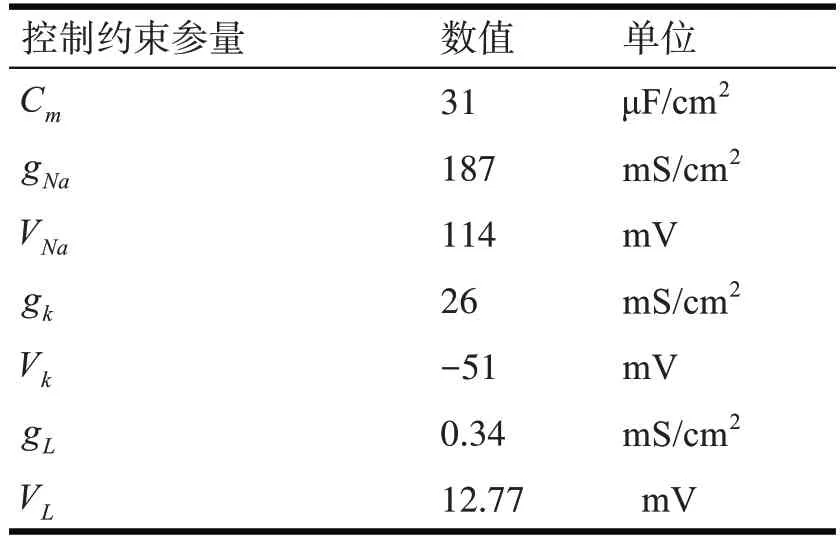
表1 大口徑魚雷視覺能量優化控制約束參量模型的參數值
根據上述仿真環境和參量設定,進行大口徑魚雷水下引爆定位控制的仿真測試,采用有限元網格分析,得到初始攻擊位置分布如圖2所示。

圖2 魚雷初始攻擊位置
采用本文方法,分析注水位置和注水質量對航行器著陸速度、位移、總著陸時間和垂推作用時間的影響,結合魚雷的俯仰角跟蹤和參數定位識別,得到魚雷水下引爆的末端位置如圖3所示。
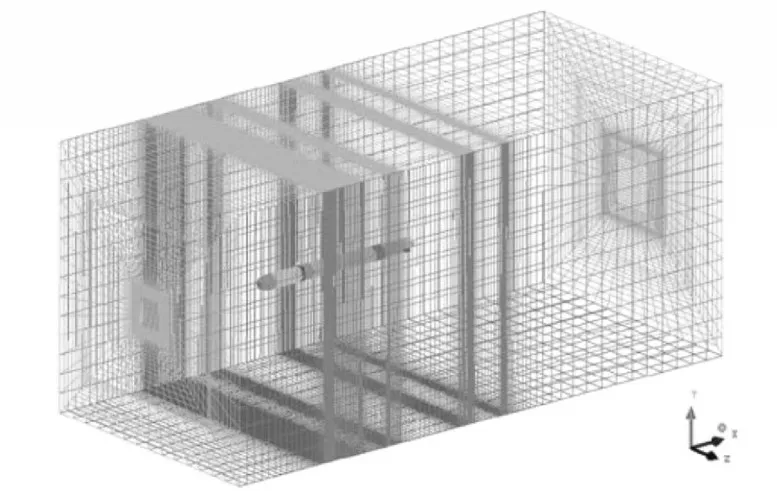
圖3 魚雷水下引爆的末端位置
分析圖3 得知,本文方法能有效實現對大口徑魚雷水下引爆定位控制,測試魚雷對敵攻擊的輸出沖激響應,如圖4所示。

圖4 攻擊沖激響應特征分析
分析圖4 得知,本文方法能有效識別敵方目標,沖激響應特征分辨力較高,能有效實現對敵目標攻擊,輸出魯棒性和穩定性較好,收斂誤差曲線如圖5所示,分析得知,本文方法的收斂誤差較低。

圖5 收斂誤差測試
5 結語
構建一種優化的大口徑魚雷水下引爆定位控制模型,結合對魚雷對敵目標的深水探測和回波檢測技術,采用聲吶定位裝置,實現對大口徑魚雷水下引爆定位和自動引爆裝置設計。本文提出基于懸停駐留的大口徑魚雷水下引爆定位控制技術。建立大口徑魚雷的水下動力學和運動學模型,采用有限元分析方法建立魚雷水下懸停駐留的湍流模型,通過調整魚雷的位置和姿態,結合回波探測技術,采用定位掃描和懸停駐留技術實現魚雷因定位引爆控制。測試得知,本文方法的收斂誤差較低,沖激輸出響應能力較強。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56