基于區域分解譜單元法加肋圓柱殼振動控制研究*
2023-08-30 03:34:08周茂盛張振海鄒蕙陽
艦船電子工程 2023年5期
周茂盛 張振海 鄒蕙陽
(1.海軍工程大學動力工程學院 武漢 430033)(2.海軍工程大學艦船與海洋學院 武漢 430033)
1 引言
加肋圓柱殼結構被廣泛應用于水下航行器等海洋平臺的設計研發之中,是海上設備中的重要組成結構。其振動特性不僅基于圓柱殼自身的結構振動,肋骨作用條件也會對結構振動特性產生重要影響。環肋通過集中質量加強整體結構的強度,對系統噪聲起到了良好的隔離作用的同時提高了聲學性能[1]。但因為肋骨的存在阻礙了彈性波的傳播,改變了圓柱殼體的結構連續性。因而對分段圓柱殼體的振動特性分析成為加肋殼體結構主動控制技術發展的關鍵[2]。
加肋圓柱殼是對外輻射噪聲聲場的載體,需要通過主動控制技術才能有效避免機械噪聲帶來的低頻化和線譜化[3~4],近年來不少研究學者著手進行研究加肋殼體的主動控制技術。傳統的有限元計算方法由于參數設置方便,原理簡單,效率高等優點被廣泛應用。當被控設備尺寸適中且無其余復雜外界條件作用時,能夠做到計算準確有效抑振,但無法精確求解大型復雜模型結構的振動問題[5]。由此利用波譜單元法求解分段加肋結構問題的研究方法在主動控制技術的發展中嶄露頭角。波譜單元法通過大量減少自由度,能夠對復雜殼體結構進行振動求解,具有收斂速度快,計算精度高的優點[6~7]。能夠有效提高潛艇航行時的聲隱身性能。
波譜單元法對復雜殼體結構的波動問題的求解相較于有限元法更具有高效性和卓越性:周叮[8]以環形板為研究對象,基于波譜單元法對其進行動力學分析,得出了不同殼體厚度條件下固有頻率的變化特性;Casimir[9]利用波譜單元法,推導了圓柱殼結構的動剛度矩陣;Pan 等[10]設計主動控制實驗控制彎曲波的傳播,理論上可以降低30dB。以上研究成果充分說明波譜單元法在加肋殼體結構振動特性主動控制技術研究中的優勢。但在實際工程問題中,常規波譜單元法在采用單區域離散方法求解頻域中的復雜系統矩陣時往往會消耗大量的計算資源,容易產生計算瓶頸,不能保證計算結果的準確[11]。
針對當前加肋圓柱殼體主動振動技術存在的計算難題,本文采用基于譜單元法的區域分解[12](DDM-SEM)對其振動特性進行求解。以周期分布的環肋殼體為研究對象,根據肋骨間距將大型加肋殼體分解成多個等長圓柱段,每個分段采用譜單元法獨立求解,再結合肋骨作用條件將各圓柱段的振動解加以耦合得到板結構的位移解,將得到的計算結果設計主動控制實驗驗證,實驗說明區域分解在振動特性分析中的有效性。研究結果可應用于加肋圓柱殼體的主動控制技術研究中。
2 加肋殼體模型及其譜分析
2.1 基于區域分解的加肋殼體譜分析
本文將加肋殼體簡化為圓柱殼結構,環肋視為力的形式,通過在位移和梯度連續[13],其作用力的描述形式如下:
式中,ws,νs分別表示表示第s 根環肋的徑向和周向位移,K為抗拉勁度,Ω2為頻率參數。
由于只考慮環肋在徑向的作用力,故加肋圓柱殼的物理模型可表示為利用譜單元法將位移解v,w 帶入到肋骨表達式中,譜單元法單三角級數展開得到的位移解v,w的數學表達式:
式中,比例系數γsn為比例系數,ksn表示波數,Asn為幅值系數。
得到在某一固定模態n 下任意一根環肋的作用力表達式,基于區域分解中的疊加原理,得到多段加肋圓柱殼肋骨作用力Fw表達式為
2.2 多段加肋殼體耦合
基于區域分解的譜單元的分析過程中,環肋周圍兩段殼體由于結構連續性,可利用一個譜單元對其進行描述,以環肋為邊界點,通過區域分解將整體加肋殼體分解成多個子區域。選取任意一個子區域,通過求解系統矩陣得到幅值系數Asn,最后得到單個區域的位移響應。同時各個子區域間在連接位移和受力連續,滿足下列方程組:
其中,L 和R 分別表示左右兩段圓柱殼體的計算參數。
通過點力的作用條件和邊界平衡方程,可得到含有16 個未知的幅值系數AjL和AjR,簡化后的方程組可求解得到兩段耐壓殼體的位移解。以此類推,對于環肋數量為n 的耐壓殼體結構可將其分為8(n+1) 段耐壓殼體,寫成一般矩陣形式:
在每個周向波數和頻率,根據殼體的結構參數,可以得到系數矩陣[KA],而力向量{F}是已知的,因此由式(5)可以解出各分段加肋殼體的幅值系數,從而求解得到加肋圓柱殼體的振動響應。
3 加肋圓柱殼主動控制方案
加肋圓柱殼體的振動響應可視為線性系統,任意點的位移響應與激勵成正比,此時任意點的位移響應可表示為
式中,N 是激勵力的數量,M 是控制力的數量;wpn(x,θ)是激勵力Fpn單獨作用時的位移傳遞函數,wsm(x,θ)是控制力Fsm作用時的位移傳遞函數。
利用徑向位移均值來衡量主動控制的效果。控制目標是使位移在圓周方向的積分的均方值最小。
將控制力寫成復數形式,對其實部和虛部分別進行求導,使其結果為0 即可得到目標函數的最小值,對于多點控制,用矩陣形式表達為
最后將計算得到的控制力通過控制系統驅動作動器作用于殼體結構相應位置,可得到加肋圓柱殼結構的主動控制方案。
4 數值計算
4.1 計算模型及區域劃分
以實驗場地的大型環肋耐壓殼為研究對象,忽略外在流體以及設備內部設備的噪聲影響模型選擇1∶4 的實體模型建模,加肋殼的三維模型如圖2所示,實際加肋殼體的基本結構參數見表1。
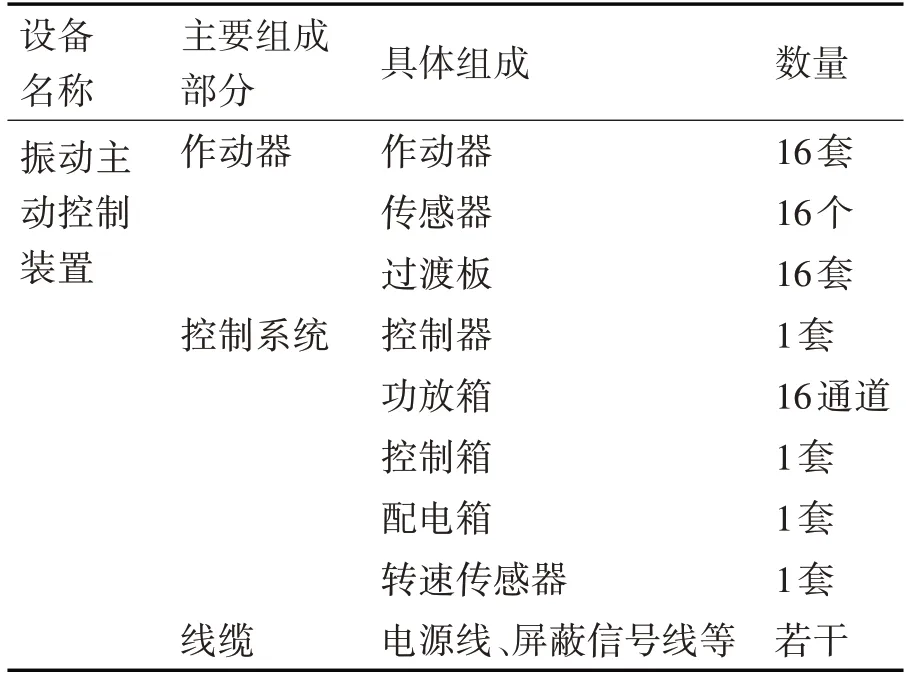
表2 實驗設備配置表
4.2 數值計算方法
根據結構參數和簡化后的加肋殼模型,計算時采用波譜單元法,基于譜關系將振動微分方程轉移到頻域上求解,最后通過周向均方法向速度級來反映振動響應,從而制定主動控制方案,基于加肋殼體結構的Donnell 運動方程,考慮到彈性波在結構中的傳播,使用單三角級數展開法求解系統矩陣,使得位移在圓周方向的積分的均方值最小,求解得到目標函數的最小值。在圓周上根據需要分布多個控制力對結構的振動進行控制,為達到理想的實驗效果,控制力數量六個的情況下對單點激勵的控制效果,計算頻率范圍為5Hz~350Hz。激勵力位移z0=0,θ0=0 處,控制力在軸向也位于z=0 處,在圓周上與激勵力成一定角度分布。根據區域分解選取某一段相鄰肋骨的中間位置,控制力和激勵源分布位置的相對位置示意圖如圖3所示。
4.3 數值計算結果分析
根據結構參數和簡化后的加肋殼模型,計算了結構的均方法向速度級傳遞函數,同時基于主動控制方法計算了該結構模型在主動控制后的均方法向速度級,計算結果如圖4所示。
圖中顯示加肋殼結構模型的線譜數較多,從整體上看,通過該方法計算得到的數值計算結果在測試頻率段的控制效果良好,尤其是0~150Hz的低頻段的控振效果明顯,只有在280Hz左右的頻率段沒有起到控制作用,甚至引起了反效果,從整體上起到了對加肋結構的主動控制效果。其中,0~150Hz的低頻段能夠達到8dB~12dB 的控制效果,由于實驗條件的限制,作動器無法在高頻率段長時間工作,故選取120Hz 頻率處的線譜進行主動控制實驗。
5 主動控制實驗
5.1 實驗布置
本文以加肋艙段外殼的多段結構為試驗對象,以艙段的吸排氣風機作為激勵源。在其取艙壁到5 號肋之間相鄰5 段殼體區域(肋骨及其對應艙段殼體,如圖5 所示)作為測試對象搭建線譜主動控制實驗平臺,分析基于區域分解譜單元法的主動控制效果。線譜主動控制試驗的裝備主要有:前饋控制式集成控制箱、配電箱、功率放大器作動器、加速度傳感器等組成。具體設備配置情況見表1。
實驗布置主要在兩個方面:測試系統和倉殼內部結構安排。測試系統包括試驗臺架、數據采集模塊、計算機等設備。加速度傳感器用于采集的結構不同位置的加速度信號;數據采集模塊用于向計算機輸入信號;計算機用于對采集信號進行處理,測試系統原理圖見圖。實驗艙段結構內布置多臺激振器,可以模擬多個振源,然后通過多個控制器對結構的振動進行控制。線譜控制試驗開始時,首先通過控制器控制激振器模擬激勵源對殼體結構進行激振,并通過測試系統采集到殼體結構的振動信號;然后通過NI LabVIEW 編寫的控制算法來驅動控制器對結構的振動進行主動控制,并同測試系統采集到殼體結構的振動信號,通過對比控制前后殼體結構的振動,計算控制效果,實驗艙段內部分激振器及控制器的布置圖如圖6所示。
受條件限制,試驗時采用的作動器不能長時間工作在150Hz 以上頻率,殼體結構比過大,根據試驗的考察指標,需要測整個面的振動,在測試殼體結構受激勵作用以及施加控制力之后的結構振動都是通過移動傳感器來測不同區域的振動信號,因此試驗過程中是對120Hz處的線譜進行主動控制。
5.2 實驗方案及數據處理
實際結構中含有大量的設備,因此在試驗過程中首先通過試驗的方法測得結構相應的傳遞函數,然后根據測得的傳遞函數計算控制相應激勵所需的控制力,通過作動器輸出相應的控制力,對殼體結構的振動進行主動控制,通過測量殼體結構上各點的振動響應來評價控制效果。由于設備條件限制,試驗時采用的作動器不能長時間工作在150Hz以上頻率,但由于殼體結構較大,根據試驗的考察指標,需要測量整個殼體表面的振動,在測試殼體結構受激勵作用以及施加控制力之后的結構振動都是通過移動傳感器來測不同區域的振動信號,因此試驗過程中是對120Hz 處的線譜進行主動控制。具體方法如下:
實驗模型中選取以艙首內壁為起點的6 段相鄰艙段,在任意艙段中間位置選取沿周向均勻分布的16 個點,實驗頻率范圍為5Hz~315Hz,采用單點激勵的作用方式,激勵力和控制力位于同一肋間的同一軸向的不同軸周向位置,計算6 個艙段振幅平均值,考慮到各測試點間的相互耦合,選取點1、點6、點15 和點16,計算得到不同艙段下控制前后在該兩點的加速度級響應及其平均值,參考加速度為10-6m/s2,。通過比較控制前后平均值以及差值來衡量主動控制的實驗效果。
6 實驗結果分析
由于結構的特殊性和試驗的考察指標,需要測量整個殼體表面的振動,在測試殼體結構受激勵作用以及施加控制力之后的結構振動都是通過移動傳感器來測不同區域的振動信號,根據數值結果在試驗過程中參考120Hz 處的線譜控制效果來驗證仿真的正確性。
圖7~圖10 表示的是5,14 兩個測試點在不同肋位處的控制前后的振動響應頻譜,圖7 和圖8 中可以看出測試點5 在全頻率段均有減振效果,低頻段的減振效果較好,120Hz 頻率處的平均控制效果達到了11.48dB,減震效果達到了9.1%。可能是由于周向位置上與激勵點比較接近。
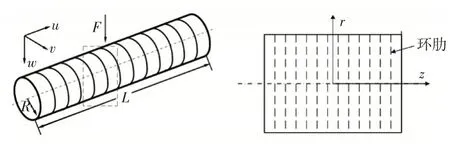
圖1 加肋殼結構示意圖
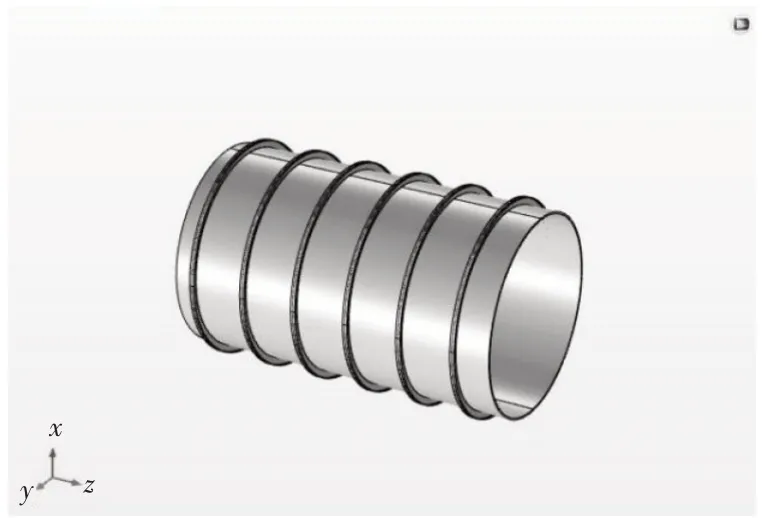
圖2 加肋殼體的三維建模示意圖
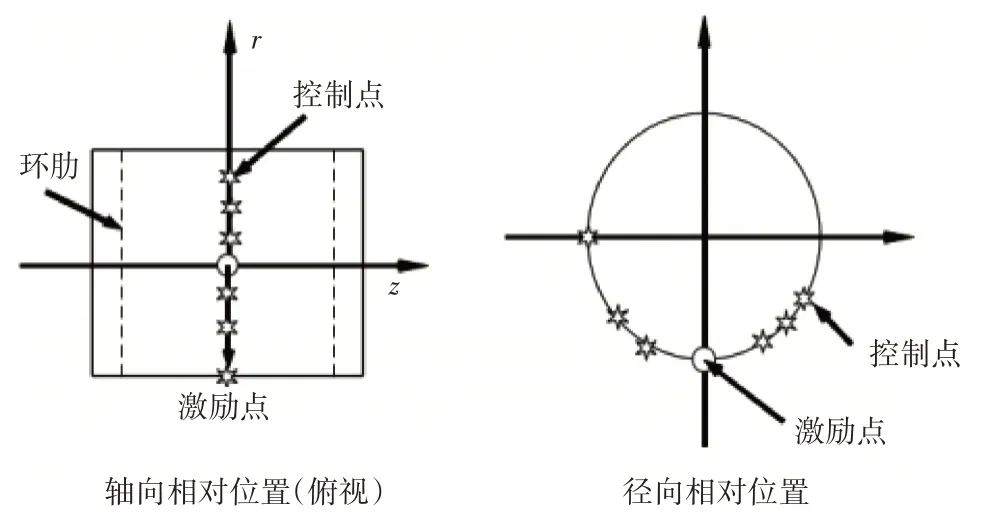
圖3 激勵源與控制力的相對位置示意圖
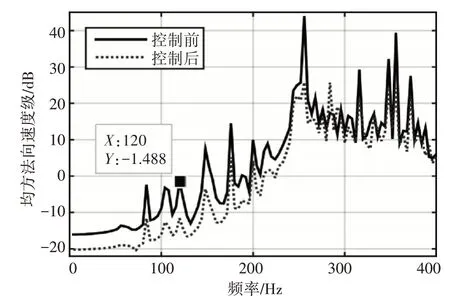
圖4 加肋殼體結構模型均方法向速度級傳遞函數

圖5 激勵點,控制力及測試點分布示意圖

圖6 主動控制實驗布置圖
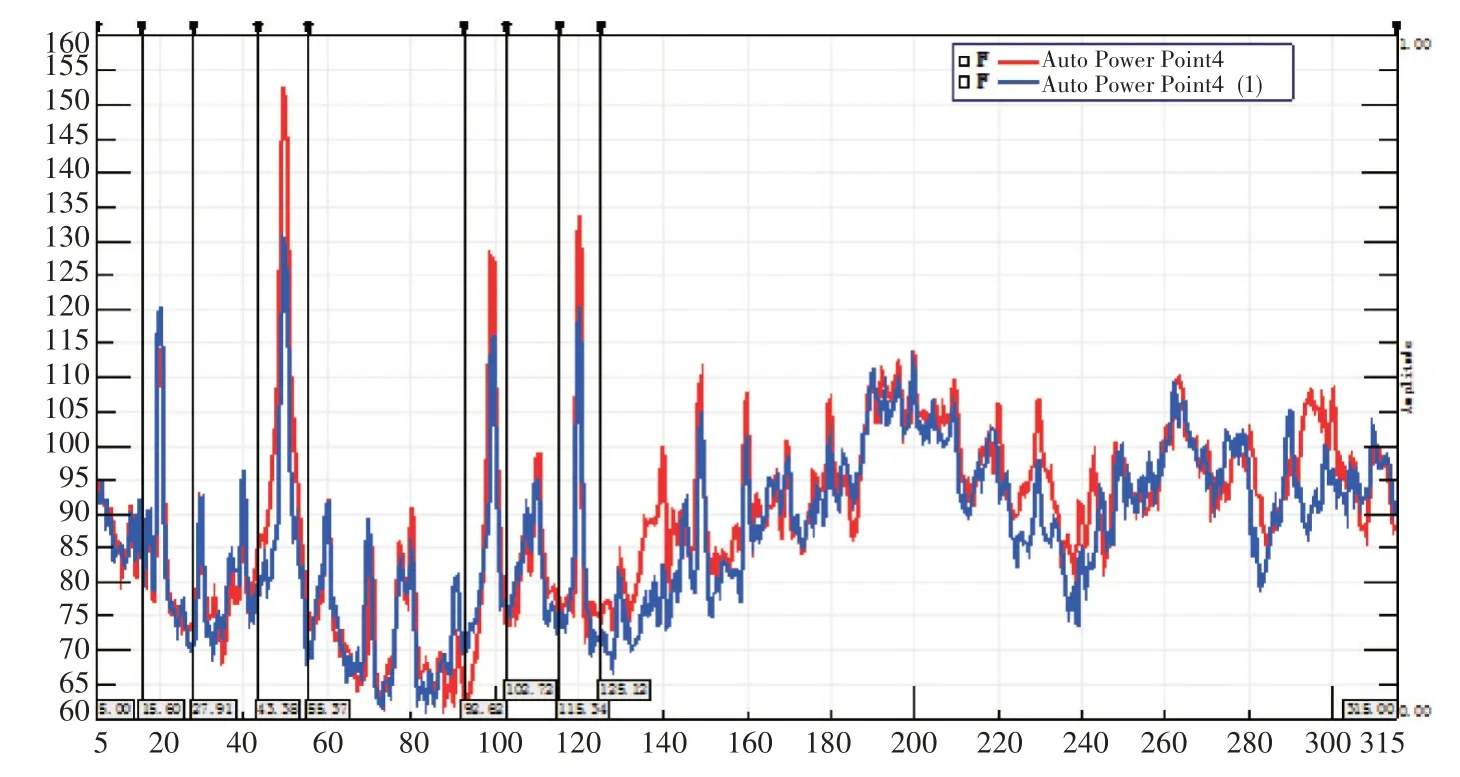
圖7 點5控制前后的加速度響應
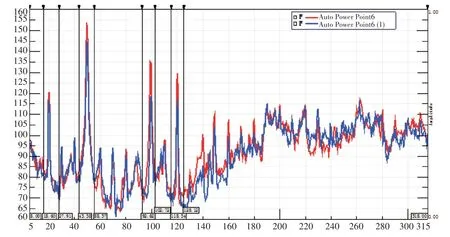
圖8 點6控制前后加速度響應
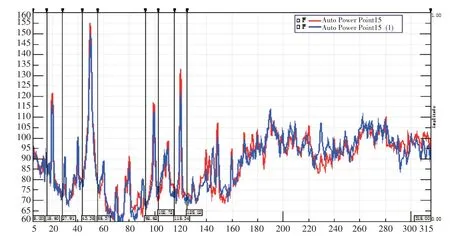
圖9 點15控制前后加速度響應
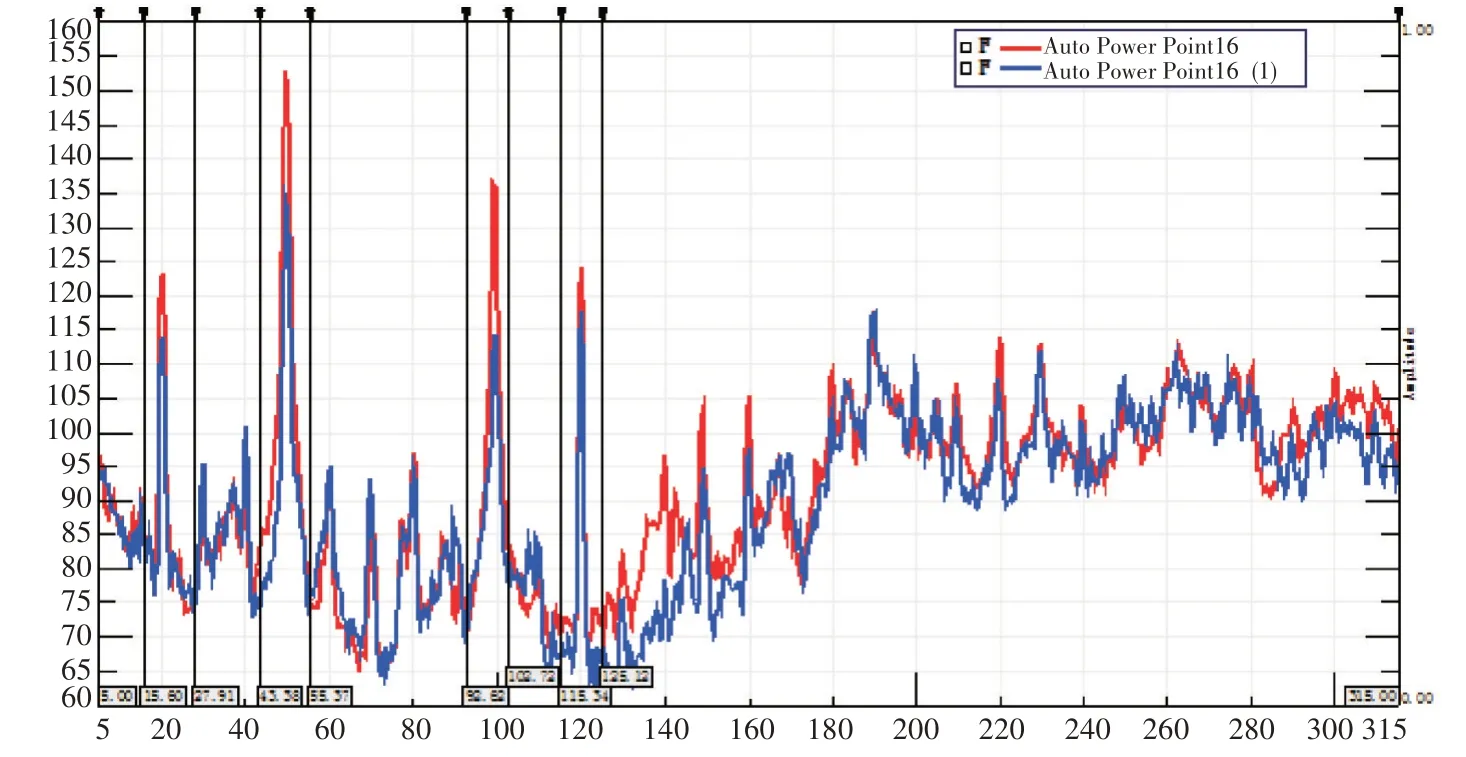
圖10 點16控制前后加速度響應
從表3 數據中可知,相對遠離激勵點的測試點14,雖然在高頻段控制效果不佳,但在120Hz 頻率處仍有5.46dB 的控制效果,低頻段起到了穩定的控制效果。從圖中可以看到,控制前測試點5 的振動要遠高于測試點14,但控制后測試點5的振動速度與測試點14的振動大致相當,這是由于測試點5距離激勵點比較近,所以控制前的振動速度要高于測試點14,施加控制力之后,由于是對殼體整體的振動進行控制,因此振動強的部位控制效果要好于振動弱的部位。
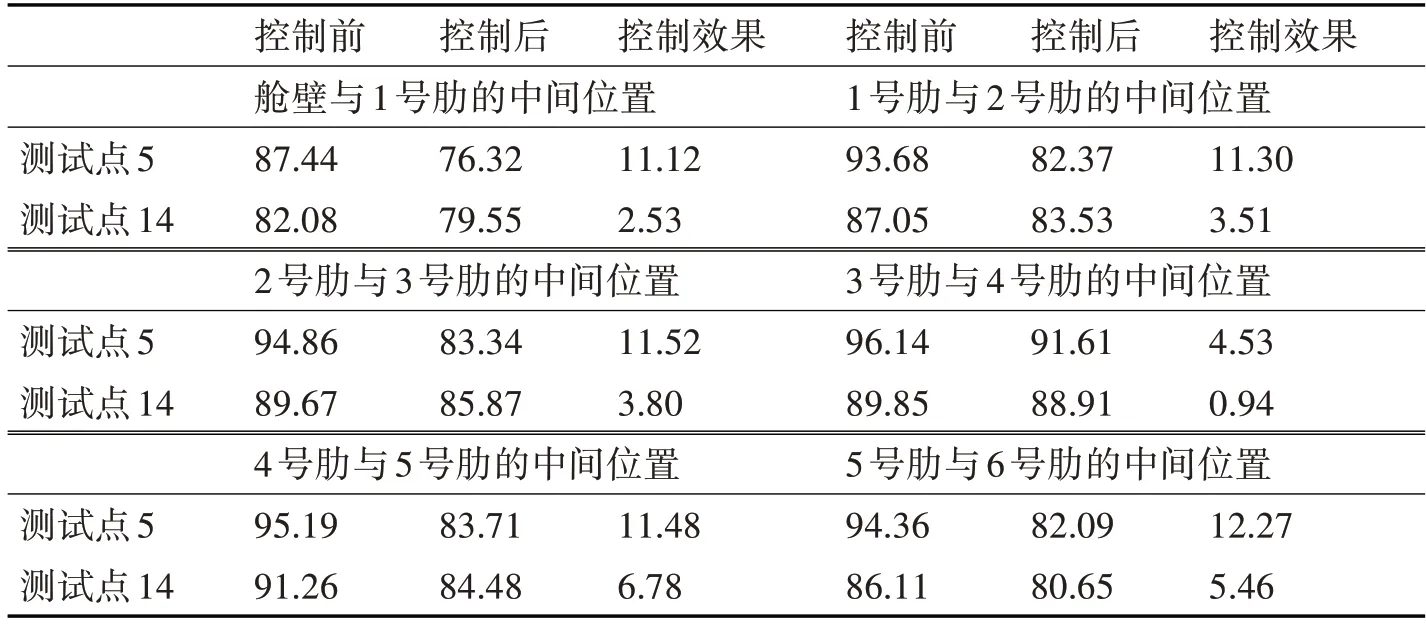
表3 120Hz頻率處控制前后的加速度級
7 結語
本文中采用的區域分解的譜單元法對加肋殼振動特性進行深入研究,實驗過程中取得了良好的控制效果,并得出以下結論:
1)針對加肋圓柱殼體振動響應計算問題,本文提出了一種基于區域分解的譜單元計算法,推導了加肋殼體的肋骨作用力計算公式和多段殼體振動幅值的求解方法。
2)基于NI LabVIEW 控制系統搭建的線譜主動控制實驗平臺,開展了加肋圓柱殼體振動特性研究,通過計算不同區域相同測試位置控制前后均方法向速度級的差值分析主動控制效果,實驗結果達到預期,驗證區域分解法的有效性。
3)本文的研究成果可應用于大型復雜結構的振動響應分析以及主動控制方案的制定,從而提升設備整體的聲隱身特性。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
中老年保健(2021年12期)2021-11-30 02:58:01
哲學評論(2021年2期)2021-08-22 01:53:34
天天愛科學(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
數學物理學報(2017年6期)2018-01-22 02:26:40
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
Coco薇(2016年8期)2016-10-09 02:11:50