復雜水域中的無人艇群分散式控制*
2023-08-30 03:40:30龔謝平
艦船電子工程 2023年5期
劉 洋 王 征 尹 洋 龔謝平
(海軍工程大學電氣工程學院 武漢 430032)
1 引言
無人艇技術經過幾十年的發展已經相對成熟,在軍事和民事領域發揮了重要的作用。為了適應未來復雜的水面任務,除了提高無人艇的機動性能,還需要考慮如何以現有的技術基礎,發展更加有效的無人艇管理和組織模式。考慮到單艘無人艇的功能對任務需求面覆蓋窄的缺點,近些年的研究熱點正在逐步由單艇向多無人艇編隊協同靠攏,如:蜂擁、集群、聚集、渦旋覆蓋、編隊任務等。
目前協同研究大多集中在無人艇的編隊、隊形控制方面,其控制結構的設計方法主要有領航跟隨法[1]、虛擬結構法[2]、行為分解法[3]等,試驗證明這些控制結構可以較好地在空曠無干擾水域中完成隊形控制運動。按照體系結構可將多無人艇系統分為集中式、分布式和分散式[4],其中部分研究為集中式或者分布式控制結構,其明顯特征為結構中存在一艘或多艘領航無人艇,這樣的結構可以比較快地找出全局最優路徑,有較高的多邊協商效率,但也可能會有如在通過狹窄航道時靈活性較差、單個無人艇意外損耗影響整個集群效率的問題,且隨著無人艇的數目增加,無人艇間的相互協調工作的難度也會隨著群體的復雜性、動態性及耦合性指數倍增長。
而分散式控制結構有較好的穩定性以及故障冗余的特點。因此,本文試圖采用分散式結構,在Boid群集模型的基礎下設計無人艇集群控制結構,通過短程斥力避免個體碰撞,利用隱含的類粘性摩擦對齊規則項來抑制系統缺陷導致的振蕩,同時通過引入軟控制的概念建立虛構的“shill”無人艇對全局的無人艇進行約束以及避障,以提高無人艇集群的擴展能力以及降低群體復雜性。
2 無人艇建模
無人艇作為一個具有橫搖、縱搖、艏搖、橫蕩、縱蕩、垂蕩六個自由度的剛體模型,控制耦合會非常的復雜。而無人艇的控制主要在于方位,因此本文在縱蕩、橫蕩以及艏搖三個自由度上建立欠驅動的以螺旋槳為推力的無人艇的數學模型[5]。其運動學模型可以表示為
式中,η=(ηx,ηy,ψ)中ηx和ηy表示船體在北東坐標系下的位置,ψ表示艏向角;ν=(w,ν,r)中w和ν分別表示船體在船體坐標系下的前向速度和橫向速度,r表示艏向角速度。
其動力學公式表述為
式中,M為慣性矩陣;C(ν)為科氏力和向心力矩陣;D(ν)為水動力阻尼矩陣;τ=[τu0τr],是無人艇所受的推進力和轉向力矩;τe=[τeu τeν τer]為外界環境干擾。
以固定距螺旋槳為動力的無人艇的推力和轉向力矩由螺旋槳轉速δn和推力偏轉角δs決定,Fossen指出一般情況下,推力T是船速V和螺旋槳轉速δn的函數[6]:
式中,c,d是與海水密度、螺旋槳螺距相關的常量。因此τu,τr分別為
式中,xcenter為螺旋槳到船質心的距離,為動力臂。因此在T+1 時刻,可以通過計算得到期望速度vdesire,同時T 時刻的速度V和vdesire作為輸入通過PD控制可以得到T+1時刻的期望螺旋槳轉速δn和推力偏轉角δs,式(2)、(3)聯立從而實現無人艇的動力學控制。
3 無人艇集群運動分散式控制策略
如圖1 所示,分散式控制中的每艘無人艇可以相互觀察、交換信息,但它們不發送和接受直接控制命令,原因是分散式控制旨在避免群體中存在主從關系,這點是與集中式和分布式結構不同的地方。本文設置無人艇不存在主從關系,即每艘無人艇都遵從同樣的運動控制準則,控制律由整體結構所控制。

圖1 集中式結構、分布式結構和分散式結構
自然中有很多生物聚集行為,例如飛翔鳥群,它們沒有統一的控制平臺,也沒有固定的領航者,每只鳥都是一個獨立的個體,通過對動態環境的局部感知完成復雜優美的集群運動。類似這樣的集群,Gábor Vásárhelyi 等[8]將其稱之為自組織系統(the Self-organized System)。自組織系統中對象采取的行為模式由系統中的其它單元的集體效應決定,相鄰個體的物理量傾向于彼此對齊,這種行為和潛在的控制機制應該是安全、穩定和無碰撞運動的先決條件[8]。
基于Boid蜂擁運動模型,這種控制結構可描述為以下三條基本準則:
1)避免碰撞:短距離內要保證無人艇個體不發生碰撞;
2)速度匹配:通過局部交互使無人艇個體與局部小群落速度對齊;
3)全局約束:保證無人艇集群在一個約束范圍內。
3.1 短程排斥項
為了避免無人艇之間的碰撞,且防止傳感器位置測量誤差高階項而導致斥力的突變或產生奇點,本文設置一種類似于勢場力的短程分段斥力:
式中,R是斥力常數,rij是無人艇i和無人艇j的距離矢量;r0是短程斥力的影響范圍,也就是說,超過這個距離的無人艇之間不存在短程斥力;γ即為短程斥力的寬度,避免無人艇之間激發過度互斥。
3.2 局部速度調整項
在無人艇的集群中,無人艇的通信范圍通常是有限的,只能向通信半徑內的其它艇發送信息,最簡單的基于agent的集群模型將對齊規則描述為明確的數學公理:即每個單元將其速度向量對齊到臨近單元(包括自身)的平均速度向量。Yoram Koren[9]勢場法是一種簡單明了的避障方法,但其自身明顯的缺點是當無人艇及障礙物分布過多時會造成不穩定的振蕩運動。因而提出對齊規則應是基于過阻尼動力學的相互作用力或速度項的結果,以避免短程斥力可能會出現的不穩定振蕩,同時促進局部鎮定[10]。
因此設置一個類摩擦粘滯力,使一艘無人艇跟隨周圍影響半徑內無人艇達到同步,同時該項作為減震媒介,減少由于排斥等延遲和嘈雜的環境而出現的自激振蕩,并且可擴展到比較高的速度的情況。
式中,表示無人艇i和j在歐氏距離‖rij‖下的可允許最大速度差值,一旦無人艇i和j和的速度差‖vij‖大于該值,局部調整就要作用于無人艇i從而使其狀態向j靠攏;是最大速度差的臨界點,如果兩者之間的距離小于該值,則該范圍內的任何兩艇的最大速度差都維持在一個較低的速度值νfrict上,使在一定近距離范圍內的無人艇都會受到較大的局部速度調整影響;K是耦合系數,K>0;d則是調整函數f(rij,,d)的衰減速度,以用來適應不同速度的集群行為;N是在局部速度調整范圍R下與無人艇i鄰接的其它艇的個數;νij是無人艇i和j的速度矢量差。
f(rij,,d) 基于Cucker-Smale 的N-體運動模型[10]提出,薛小平[12]證明參數β<1/2 時,任何狀態下的個體均可達到漸近群體效應,即:
1)相對速度趨于0,即
2)相對位移聚集,即
圖2 是可視化作用力,其中紅線表示了無人艇之間的排斥力與距離之間的分段函數關系;綠線是無人艇i和j在某距離下的最大速度差,如果兩艇的速度差位于綠線之上(如圖中紅點‖νij‖),則局部調整速度項會作用于無人艇i,直至‖νij‖位于綠色區域。此函數可以通過改變允許無人艇在某距離下之間的最大速度差來調整適應不同的無人艇群的數量和集群速度等,具有較好的擴展性。
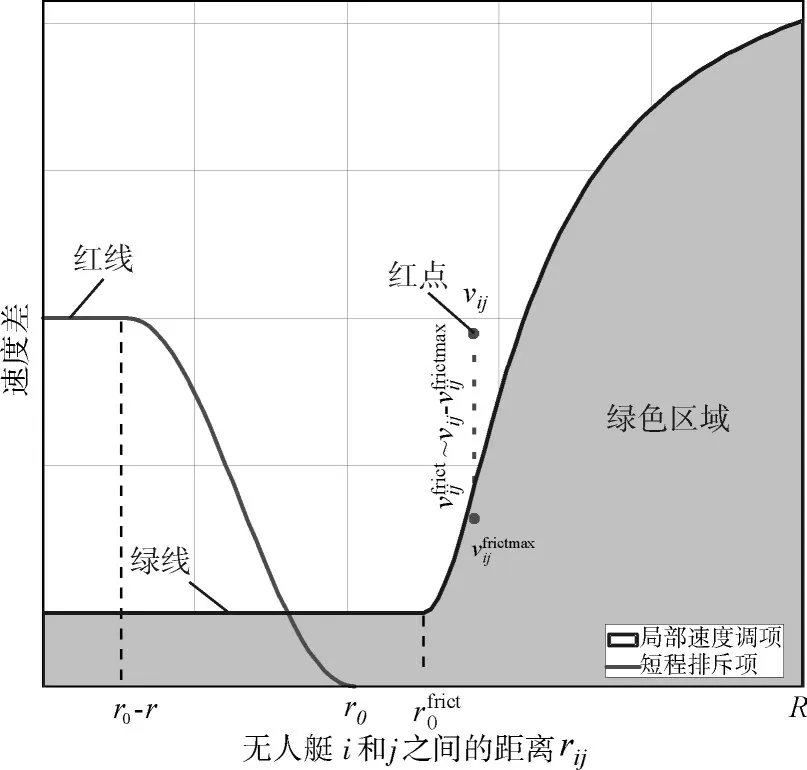
圖2 可視化作用力
3.3 全局位置約束項
韓晶[13]提出了“soft control”、“shill”的概念,其思想即:集群行為是多智能體系統的一種宏觀特征,在一個多智能體系統中,多數智能體是具有局部規則的普通智能體,當在群體中加入一些受控制的“shill”誘導無人艇單元后可以使集群行為隨著受控“shill”改變,實現所謂的軟控制(軟控制和分布式控制的區別在于:分布式控制中每個智能體是一個控制系統且有它自身的控制律;而軟控制中將所有的智能體看作一個系統,控制律是作用于“shill”而非直接作用于單個智能體)。
因此本文設置一個虛擬的“fence”的概念,將構成凸多邊形的邊上的每個點視作一艘shill 無人艇,對整個無人艇集群行為進行軟控制。為了使無人艇群能夠像生物群體一樣完成集群運動,每一個shill 無人艇,它們均有一個指向fence 內部的速度,從而誘導無人艇集群收縮至設定的范圍內;同樣柵欄內的障礙物也可以將其視作shill無人艇,它的誘導方向是由障礙物向外發散,由于分散控制中每個智能體遵循的控制律都一樣,所以任意無人艇i和虛擬shill無人艇也遵循局部速度調整公式:式中,shill 是指距無人艇i最近的任意凸多邊形fence 的點所形成的虛擬無人艇;是指無人艇i與shill無人艇之間的最大允許速度差異;ris是指無人艇i和shill 的歐氏距離;x是無人艇i與fence 的相對中心點的歐氏距離,Rs是該shill 無人艇與fence 的相對中心點的歐氏距離,b是緩沖寬度。當無人艇在該距離之外時,通過shill無人艇的誘導使其逐漸向fence 靠攏,通過調節緩沖寬度b可以適應不同的聚集程度和集群速度;Robstacle是允許的無人艇與障礙物之間的極限距離,小于這個距離將會通過局部調整避開障礙物。
3.4 集群速度項
為使無人艇群完成集群運動,將fence 視作一個剛體運動,通過作用于剛體中心的控制律來控制無人群進行定向、定點或者是跟隨等等任務。在定向集群運動的情況下,本文為無人艇設置一個自驅動速度項[14],保持無人艇擁有值為Vflock的恒定群集速度。
而在定向集群運動中,我們則需要設置一個朝向目標點的集群速度,因此自驅動速度為
式中,xtarget為目標點矢量;xfence為柵欄中心矢量。
3.5 最終期望速度
最后本文將上述作用項取矢量和,即可得到下一時刻無人艇i的期望速度:
4 多無人艇集群運動性能評價指標
多無人艇做集群運動應該滿足這樣的特點:集群的個體應該朝著目標方向排列,作為一個緊密的、連貫的類似鏈接起來的群體以平穩、快速的方式做不發生碰撞的移動。在集群運動模型中,集群過程是一個從無序到有序的類似相變的轉變過程,本文通過借用相變理論中對物理系統的有序化程度的刻畫從設定一個或者多個所謂的序參量(order parameters)的特定系統變量來描述集群的程度[15]。序參量指的是表征一個相的對稱度,這個值通常在一個相(無序相)為零,在另一個相(有序相)中為非零。因此本文選擇平均歸一化速度和聚集態相干性兩個不同方面的序參量作為評估無人艇集群運動的指標。
4.1 平均歸一化速度
在集群運動的情況下,最優先選擇的序參量是平均歸一化速度ψνel:
其中N 是無人艇總數,ν0是無人艇集群的平均絕對速度。如果無人艇群運動是無序的,單個無人艇的速度是在隨機方向指向一個小的數量級矢量;而對于有序運動,所有無人艇速度的矢量和的絕對值接近于Nν0,因此序參量ψνel可以是表示一個從0~1 的連續相變的過程。它表示了一個集群的速度指向的一致性,當該參量接近1 時表明集群正在向同一方向運動,當該參量接近0 時表明該時刻集群正在做無序運動。
4.2 聚集態相干性
群體聚集態的相干性可以衡量整個無人艇群的聚集離散程度:
該序參量捕捉了無人艇行動的速度相關性,并給出無人艇群有序程度。
5 實驗結果及分析
本文在實驗假設的多礁水域進行多無人艇集群運動數值仿真以驗證所提出的分散式控制策略的有效性和準確性。其仿真流程圖如圖3 所示,本文選用的無人艇模型主要物理參數如表1所示。

表1 無人艇模型物理參數
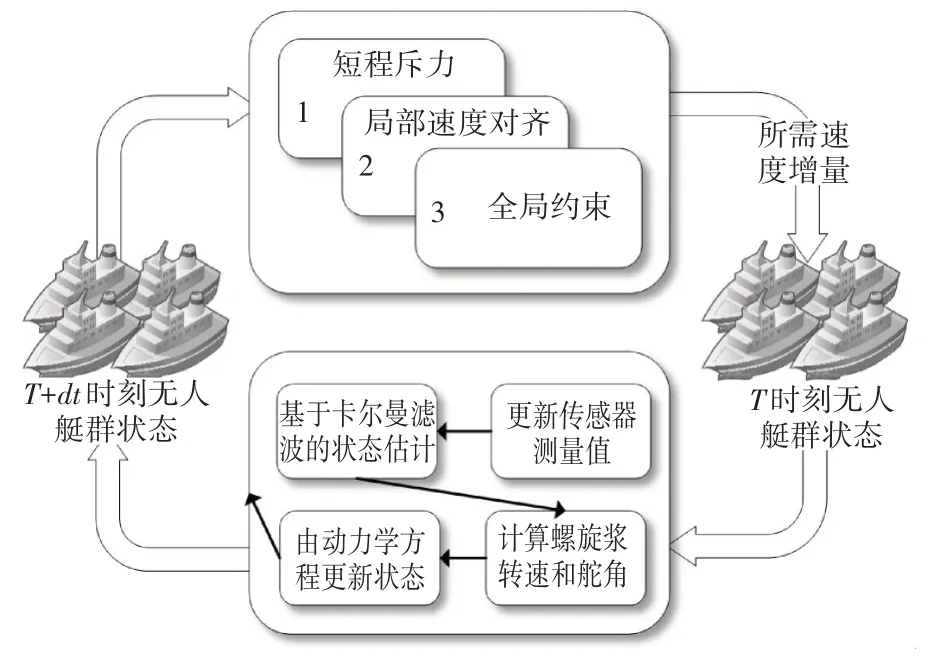
圖3 分散式控制示意圖
仿真實驗中本文設定局部通信約束的最大范圍為150m,最大鄰接無人艇數量10 艘,無人艇碰撞半徑1.5m,定義fence為邊長為50m 的正方形,無人艇初始位置、姿態均圍繞fence的中心隨機分布,初速度均為0。
實驗一選擇7 艘無人艇完成正北向的定向無人艇集群運動實驗,設置柵欄的初始位置為[170,-25]m,仿真結果如圖4。從仿真中可以看出t=0s 時無人艇隨機分布于fence 四周,隨后聚合、避障以及定向運動。同時序參量也能夠說明在一開始,群體處于比較無序的狀態,而后迅速向有序過渡,在避障過程中由于需要部分無人艇調整,所以群體的序參量又迅速下降,符合群體行為本身。
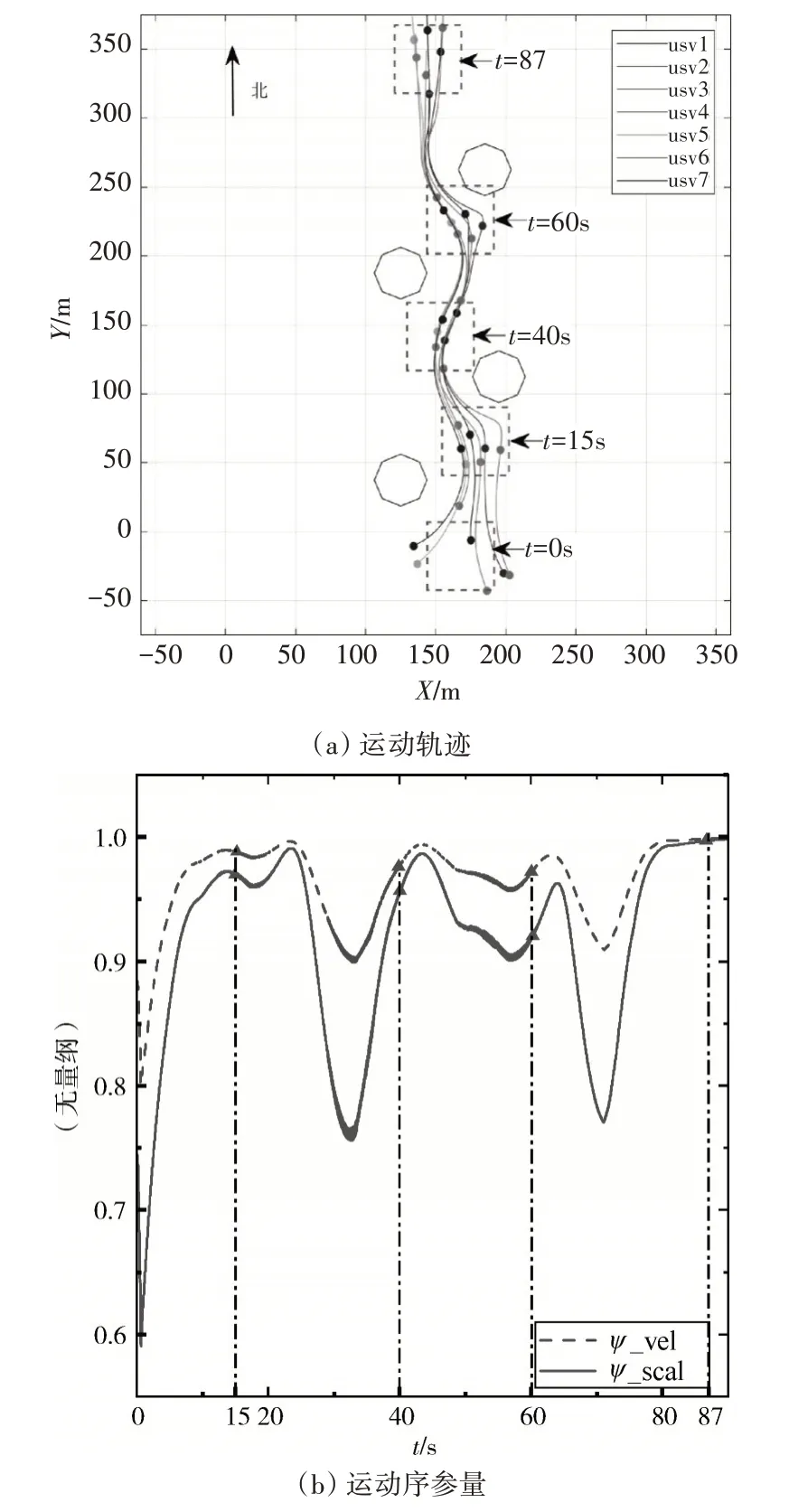
圖4 設置7艘無人艇定向集群運動
實驗二選擇11 艘無人艇做定向的集群運動實驗,其余條件與實驗一相同,以驗證該控制結構的可擴展性,仿真結果如圖5。可以看出在無人艇數量增加后,仍可順利完成集群運動,該分散式集群運動控制結構有較好的可擴展性。
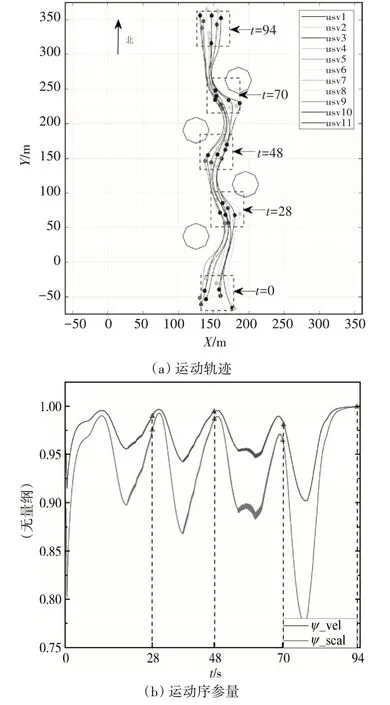
圖5 設置11艘無人艇定向集群運動
實驗三選擇7 艘無人艇做定點集群運動,其中設置5個目標點,其坐標為target1=[330,107]m,target2=[83,236]m,target3=[67,95]m,target4=[141,74]m,target5=[150,150]m,仿真結果如圖6 所示。從仿真結果看出無人艇群從t=0開始聚合并向第一個目標點移動,期間順利實現避障;集群運動到達第一個目標點后依次訪問之后的目標。結合性能指標可以看出整個集群運動過程中在密集水面障礙物水域環境下,分散式控制的無人艇集群運動可以完成迅速集結,每艘無人艇航跡穩定無明顯振蕩,具有較強的靈活性。

圖6 多無人艇定點集群運動
6 結語
本文采用了一種分散式控制結構對多無人艇集群運動進行約束控制,引入軟控制的概念,使得每艘無人艇像鳥一樣只需要掌握局部信息,在局部其它艇的影響下便可完成集群運動,擴展性較強。該控制系統不像集中式和分布式控制一樣存在中心控制器,無人艇之間可以交換信息,但不直接發送或者接受命令,這樣的控制結構可以降低無人艇自身復雜程度和造價,且不會因為主控制單元的意外損毀而破壞整體的控制功能,具有較好的抗損毀能力。
仿真實驗表明該分散式控制系統可以有效控制多無人艇定點、定向的集群運動控制,且無人艇的路線比較光滑,有一定的抗振蕩和抵御外界不穩定因素的能力。且能夠在復雜水域中完成集群避障任務后迅速收縮至fence 內,具有快速集群的優點。
但該系統也存在不足之處:在地形較為復雜且集群速度較快情況下,某些無人艇可能會因為局部速度調整項導致被“過度裹挾”向前運動,短程斥力不足以抵消這些艇向前慣性導致突破碰撞極限。下一步嘗試加入于地形、無人艇數量以及集群速度相關的自適應參數。