基于飛參數(shù)據(jù)的飛行科目識別研究*
2023-08-30 03:32:02路晶任洲史宇
艦船電子工程 2023年5期
路 晶 任 洲 史 宇
(1.中國民用航空飛行學院計算機學院 廣漢 618307)(2.南京航空航天大學計算機學院 南京 211106)
1 引言
民航領域的高速發(fā)展隨之帶來的是計算機與民航業(yè)的充分結(jié)合,飛行訓練作為民航領域中重要的一環(huán),通過飛行訓練中所產(chǎn)生的數(shù)據(jù)進行分析與研究能更好地提高訓練效率。訓練中的飛行科目完成情況,是飛行品質(zhì)評估中的一項重要內(nèi)容。在實際飛行訓練過程中,由于觀測角度的局限性,對飛行訓練科目的完成情況不能更好地把控。從飛機機載設備所獲取的飛行數(shù)據(jù)是對飛行階段較為準確的記錄,將飛行數(shù)據(jù)進行研究,并進行可視化分析,能更好地對飛行訓練科目完成情況進行研究。飛行數(shù)據(jù)中包含每次讀取間隔中的所有數(shù)據(jù),具有復雜、抽象、數(shù)據(jù)量大的特點。將飛行過程中包含的飛行科目從飛行數(shù)據(jù)中進行提取,可更好地進行相關領域的研究。
張玉葉[1]采用歐氏距離判別分析和利用動態(tài)時間彎曲距離匹配的兩級分類,能提高飛行動作識別的效率。王鳳芹[2]將真實飛行數(shù)據(jù)中的飛行動作分為6 種基本動作,使用CART 決策樹進行飛行動作的識別,通過GridSearchCV對決策樹模型進行調(diào)優(yōu),在模型調(diào)優(yōu)后的識別準確率更高。謝川[3]針對識別復雜特技飛行動作,采用專家知識庫和知識推理機對飛行動作進行識別。成肖科[4]對飛機在飛行過程中的飛行階段進行分析,采用決策樹模型將飛行階段劃分為5 類,并使用仿真數(shù)據(jù)進行驗證,證明決策樹算法對飛行階段劃分的可行性。孟光磊[7]對飛行模擬訓練的機動動作對應飛參數(shù)據(jù)進行研究,構(gòu)建了機動動作識別的動態(tài)貝葉斯網(wǎng)絡模型用于識別飛行動作。賈鎮(zhèn)澤[5]對仿真的戰(zhàn)斗機戰(zhàn)術動作進行了在線識別,通過隨機森林和支持向量機的兩級識別方法,引入了飛機狀態(tài)分割機制,能對戰(zhàn)斗機的仿真飛行數(shù)據(jù)進行戰(zhàn)術動作識別,并通過雷達對飛行數(shù)據(jù)進行捕獲,實現(xiàn)敵機戰(zhàn)術動作的在線實時識別。但由于在民航飛行訓練中的真實飛行數(shù)據(jù)存在波動,該方法無法針對真實飛行數(shù)據(jù)進行有效識別。
本文針對飛行訓練中真實飛參數(shù)據(jù)的特點,提出飛行狀態(tài)發(fā)生改變時的分割機制,數(shù)據(jù)采集自Garmin 提供的G1000 系統(tǒng)[8]。在此基礎上結(jié)合飛行科目的隨機森林和支持向量機兩級識別系統(tǒng),能對飛參數(shù)據(jù)中所包含的飛行科目進行有效識別,為相關領域的研究提供基礎。
2 飛行動作識別
在飛機飛行訓練中基本的飛行動作包括直線平飛、轉(zhuǎn)彎、上升與下降。將飛行動作可分為水平面和豎直面兩部分,對于飛行動作進行分解后的識別準確率較高。由于飛行過程中飛機狀態(tài)較為復雜,可先對飛行狀態(tài)進行分割后,再進行飛機飛行動作的識別。
2.1 飛行狀態(tài)分割機制
將飛機的飛行狀態(tài)發(fā)生變化時,飛機的飛行動作也會隨之發(fā)生改變。建立狀態(tài)分割機制可以將飛行數(shù)據(jù)進行分割,分割機制對每幀數(shù)據(jù)與上一幀的變化進行判斷。當變化量達到閾值時,則進行動作分割。經(jīng)過數(shù)據(jù)預處理的飛行訓練數(shù)據(jù),對飛行動作識別的準確性與分割機制相關性較大。
研究豎直面的飛行動作時,高度變化量與俯仰角作為分割機制判斷標準。對垂直面內(nèi)的飛行動作,文獻[9]采用爬升和下降兩種動作來描述垂直面內(nèi)的飛行動作。將水平面的飛行動作作為研究對象時,航跡角的變化量與坡度作為判斷標準。閾值決定分割點的前后位置,影響從上一個飛行狀態(tài)進入下一狀態(tài)的時間。同時閾值大小決定小范圍的飛行狀態(tài)變化是否進行識別,在水平直線飛行的狀態(tài)中,航跡角變化量較小且時間短的轉(zhuǎn)彎不被識別。飛行數(shù)據(jù)的真實性導致數(shù)據(jù)存在波動,飛行狀態(tài)分割機制的引入可有效解決該問題。飛行科目的識別流程如圖1所示。

圖1 飛行科目識別整體流程
飛行數(shù)據(jù)中飛機平均海拔氣壓高度AltMSL 記為h,航跡角TRK 為飛機運動方向。實驗中采用兩者的變化量作為實驗參數(shù),其中平均海拔氣壓高度變化量為正表示上升,反之下降,航跡角變化量為正代表右轉(zhuǎn),反之左轉(zhuǎn)。存在閾值ε,當航跡角變化量大于ε時,判定飛機飛行狀態(tài)發(fā)生變化,進行動作分割。當飛行狀態(tài)被判定為發(fā)生轉(zhuǎn)彎時,記錄變量Lθ為角度累計變化量,當轉(zhuǎn)彎角度累加到一定值時進行動作分割。
經(jīng)過實驗可知當分割閾值ε大于2.9°,小于3.1°時,可準確識別飛行科目,所以在研究過程中將閾值ε取均值3°,可保證飛行科目的識別精度。當ε取值過小時,會導致數(shù)據(jù)的輕微波動被識別為飛行狀態(tài)發(fā)生變化。當ε取值過大時,會導致部分轉(zhuǎn)彎無法有效識別。
在經(jīng)過對10 組飛行數(shù)據(jù)中的盤旋進行數(shù)據(jù)分析,可知盤旋的角度為330°至360°之間,將轉(zhuǎn)彎角度累加值的上界設置為100°,當飛機開始轉(zhuǎn)彎時Lθ進行累加,當Lθ大于100°時進行動作分割。可將一段真實的盤旋數(shù)據(jù)分為連續(xù)三組100°的轉(zhuǎn)彎以及一組小于90°的轉(zhuǎn)彎。同時,在矩形起落航線中包含四個約等于90°的轉(zhuǎn)彎,由于存在風向的影響,飛機會進行偏流修正,從而導致磁航向變化量略大于90°,航跡角變化量不受偏流修正影響。轉(zhuǎn)彎累加值上限為100°可以滿足所有90°轉(zhuǎn)彎的動作劃分,保證90°轉(zhuǎn)彎在飛行科目識別中的飛行動作子序列中有且僅有一個動作元。飛機對風向進行偏流修正如圖2所示。

圖2 飛機進行偏流修正
2.2 飛行動作元處理
由于實驗的局限性,模型識別存在一定程度的誤差,對于整個識別系統(tǒng)存在兩個階段的情況,誤差對實驗結(jié)果的影響將被放大。此階段實驗研究目的是能保證飛行動作識別的同時,需要盡可能地避免模型識別誤差造成的影響。
對于分割出的飛行片段中,每一幀通過模型識別的結(jié)果需要賦予不同的權重值。相對小角度的航跡角變化量波動,大角度的轉(zhuǎn)彎需要賦予的權重值更大。影響模型判斷水平面飛行狀態(tài)的主要因素為航跡角變化量與坡度,所以將這兩項數(shù)據(jù)作為權重值的影響系數(shù)。默認各數(shù)據(jù)幀的初始權重為1,不同狀態(tài)之間的轉(zhuǎn)變采用的權重機制不同。當從水平直行狀態(tài)向飛機轉(zhuǎn)彎狀態(tài)發(fā)生轉(zhuǎn)變后,航跡角變化量為主要影響因素,而飛行狀態(tài)轉(zhuǎn)變相反時,應取航跡角變化量的倒數(shù)。
在一段分割完成的飛行數(shù)據(jù)段中,飛機的飛行動作理論上應保持一致。使用隨機森林模型對該段飛行數(shù)據(jù)進行飛行動作識別時,由于數(shù)據(jù)的波動性、人工標簽所導致的訓練誤差等因素,在該段數(shù)據(jù)中會出現(xiàn)少量不可避免的識別錯誤。采用飛行動作結(jié)合權重的方法,將數(shù)據(jù)幀的飛行動作識別結(jié)果標簽賦予相應的權重值,并對該段數(shù)據(jù)中的權重值進行統(tǒng)計,取權重值較大的飛行動作標簽作為該段的統(tǒng)一飛行動作。
3 飛行科目識別
飛行科目是由不同的飛行動作組合而成,通過上一階段的飛行動作識別,將飛行動作序列作為此階段識別的特征值。在飛行科目中較基礎的包括矩形航線、S轉(zhuǎn)彎以及8字飛行,這幾種飛行科目并不涉及高度變化,都是在水平面內(nèi)完成動作。涉及到起落的飛行科目包括矩形起落航線,其中航線的一邊與五邊分別為起飛和降落階段,此科目在飛行訓練中較為常見。在性能機動中的飛行科目較為復雜,其中包含大量飛機坡度轉(zhuǎn)變以及高度的變化。飛行科目所包含的飛行動作序列較為特殊,通過相鄰固定長度的飛行動作序列進行飛行科目識別。360°轉(zhuǎn)彎,此處稱為盤旋,與S 型轉(zhuǎn)彎所包含的飛行動作序列較短,四段90°的轉(zhuǎn)彎可組成該飛行科目。8字飛行與S轉(zhuǎn)彎在飛行動作序列上存在一定程度的相似性,航跡角變化量是區(qū)分兩者的有效方式。矩形航線和矩形起落航線在飛行動作序列上,也具有相似性。矩形起落航線包含起飛與降落兩個階段,涉及到高度的變化,在飛行動作識別中需考慮豎直面上的飛行動作。
在真實飛行訓練中,飛行數(shù)據(jù)存在波動,在水平面內(nèi)的飛行科目中,仍存在豎直面上小幅度波動。并且在部分訓練科目中存在階段性的緩慢高度變化,所以仿真數(shù)據(jù)實驗與真實數(shù)據(jù)實驗仍存在較大程度差異。在本文中以盤旋為主要研究對象,在此基礎上可增加飛行科目的識別種類。S 型轉(zhuǎn)彎與盤旋識別相似度較大,識別的可行性較高。平面內(nèi)飛行科目的分類如表1所示。

表1 飛行科目包含動作子序列數(shù)量

表2 不同算法識別結(jié)果比較
4 實驗方法與分析
實驗使用的數(shù)據(jù)集為飛行訓練未公開數(shù)據(jù)集,數(shù)據(jù)格式為CSV。其中包括經(jīng)度、緯度、平均海拔氣壓高度、航跡角等位置數(shù)據(jù)信息,以及俯仰角、坡度等狀態(tài)數(shù)據(jù)。
4.1 飛行數(shù)據(jù)預處理
實驗提取飛行訓練數(shù)據(jù)中的經(jīng)緯度、平均海拔氣壓高度、航跡角、俯仰角、坡度以及指示空速。由于飛行訓練數(shù)據(jù)的真實性,對提取的實驗數(shù)據(jù)進行異常值以及缺失值檢查。首先通過航跡角和平均海拔氣壓高度數(shù)據(jù)計算得到數(shù)據(jù)幀之間的航跡角變化量ΔθTRK和高度變化量Δh,對于數(shù)據(jù)中存在的局部缺失值和異常值,使其值與前一數(shù)據(jù)幀值相等。為了消除載體飛機運動的影響,將飛參數(shù)據(jù)中的經(jīng)緯度數(shù)據(jù)轉(zhuǎn)換到地表北東下坐標系[10]。
從初步處理后的飛行數(shù)據(jù)中再次提取高度變化量、航跡角變化量、坡度、俯仰角數(shù)據(jù)。將數(shù)據(jù)中的高度變化量和航跡角變化量進行標準化處理,并將其余數(shù)據(jù)進行歸一化處理。通過實驗證明將數(shù)據(jù)進行歸一化和標準化處理,無法提升識別精度,該步驟目的是為了降低不同的機型以及飛行環(huán)境帶來的影響。
4.2 基于飛行狀態(tài)分割機制的飛行動作識別
從初步處理后的飛行數(shù)據(jù)中再次提取高度變化量、航跡角變化量、坡度、俯仰角、指示空速數(shù)據(jù),作為飛行動作識別模型的特征值。其中指示空速數(shù)據(jù)可對飛機空中或地面進行區(qū)分,高度變化量對垂直平面內(nèi)飛機狀態(tài)的影響相比水平面的影響較大,航跡角變化量與之相反。
飛行數(shù)據(jù)中包括水平、垂直以及整體動作標簽,使用不同的特征項,對水平和垂直平面上的飛行動作標簽進行識別。使用狀態(tài)分割機制對飛行數(shù)據(jù)進行分割,并保存每段分割節(jié)點的索引序號。當狀態(tài)分割機制對當前節(jié)點判斷為飛行狀態(tài)發(fā)生變化時,對從該節(jié)點開始到下個分割節(jié)點之間的飛行數(shù)據(jù)采用隨機森林模型進行飛行動作識別。識別獲得當前分割段內(nèi)飛行動作標簽序列,再通過該片段內(nèi)每個數(shù)據(jù)幀的權重占比,確定整段飛行狀態(tài)的飛行動作。
將三組飛行訓練數(shù)據(jù)合并,作為隨機森林模型的訓練集,將另外一組飛行訓練數(shù)據(jù)作為測試集。測試集共包含5196 條數(shù)據(jù),使用訓練完成的模型對測試集進行識別。對測試集飛行動作以及水平面內(nèi)飛行動作識別結(jié)果進行對比,可得到模型對水平面內(nèi)的飛行動作識別精度較高。將水平面內(nèi)的飛行動作識別作為研究對象,可以提高第二階段飛行訓練科目識別的精準度。采用飛行狀態(tài)分割機制對飛行數(shù)據(jù)進行分割后,再通過隨機森林模型進行識別可提高識別精準度。將整段飛行動作統(tǒng)一,可減少模型在該段數(shù)據(jù)中的識別誤差。由于分割點附近存在一定程度的誤差,模型識別精度沒有明顯提升,但識別精度相比直接識別的精度更高。同時采用該機制對于第二階段飛行訓練科目的識別精度提升更大,飛行訓練科目識別對于分割節(jié)點處范圍內(nèi)的識別精度要求較低。
通過對兩種方法進行對比實驗可知,隨機森林相比決策樹算法在實驗中識別準確率較高,這是由于隨機森林不依賴單一決策樹的特征重要性。兩種方法在水平面內(nèi)進行飛行動作識別的準確率,相比較空間內(nèi)動作識別較高,將空間內(nèi)9 種飛行動作劃分簡化為水平面內(nèi)3 種動作劃分,可以提高識別準確率。在引入飛機狀態(tài)分割機制后,兩種方法的識別準確率在原有基礎上進一步提高,證明了飛機狀態(tài)分割機制的有效性。
4.3 飛行訓練科目識別
將每段的飛行動作標簽按照時間組成動作標簽序列,相鄰9 個飛行動作標簽作為支持向量機模型的特征值。不同的飛行訓練科目由不同的飛行動作序列組成,將不包含飛行訓練科目的飛行動作序列以及不同飛行訓練科目的飛行動作序列進行分類。
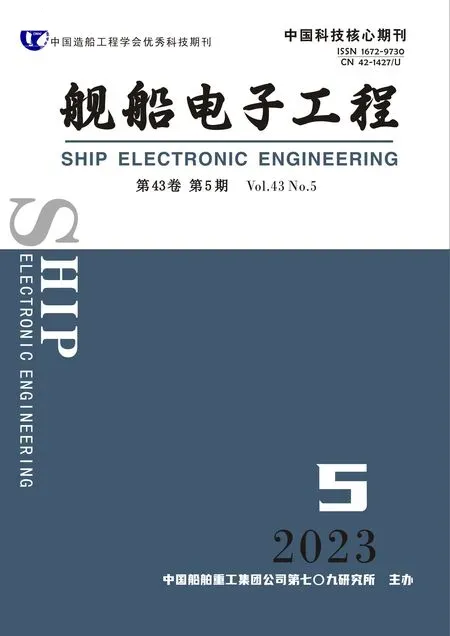
從測試組的飛行軌跡中識別出存在的飛行科目,在此次實驗中包括8 字飛行和矩形起落。識別結(jié)果中8字飛行科目的軌跡圖如圖3所示。

圖3 8字飛行識別結(jié)果
矩形航線與矩形起落航線的俯視圖相同,對識別結(jié)果中的高度變化進行判斷,當一邊與五邊分別為直線上升和下降時,識別結(jié)果為矩形起落航線,此次實驗中存在兩組矩形起落航線科目,模型能對其進行準確識別。識別結(jié)果中矩形起落航線的軌跡圖如圖4所示。
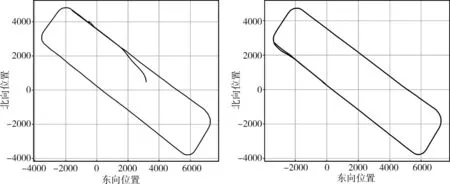
圖4 矩形起落航線識別結(jié)果
將相鄰4 個飛行動作標簽作模型的特征值則會識別較簡單的飛行科目,360°轉(zhuǎn)彎可由4 個飛行動作進行表示。對一組飛參數(shù)據(jù)進行識別的結(jié)果如圖5所示。
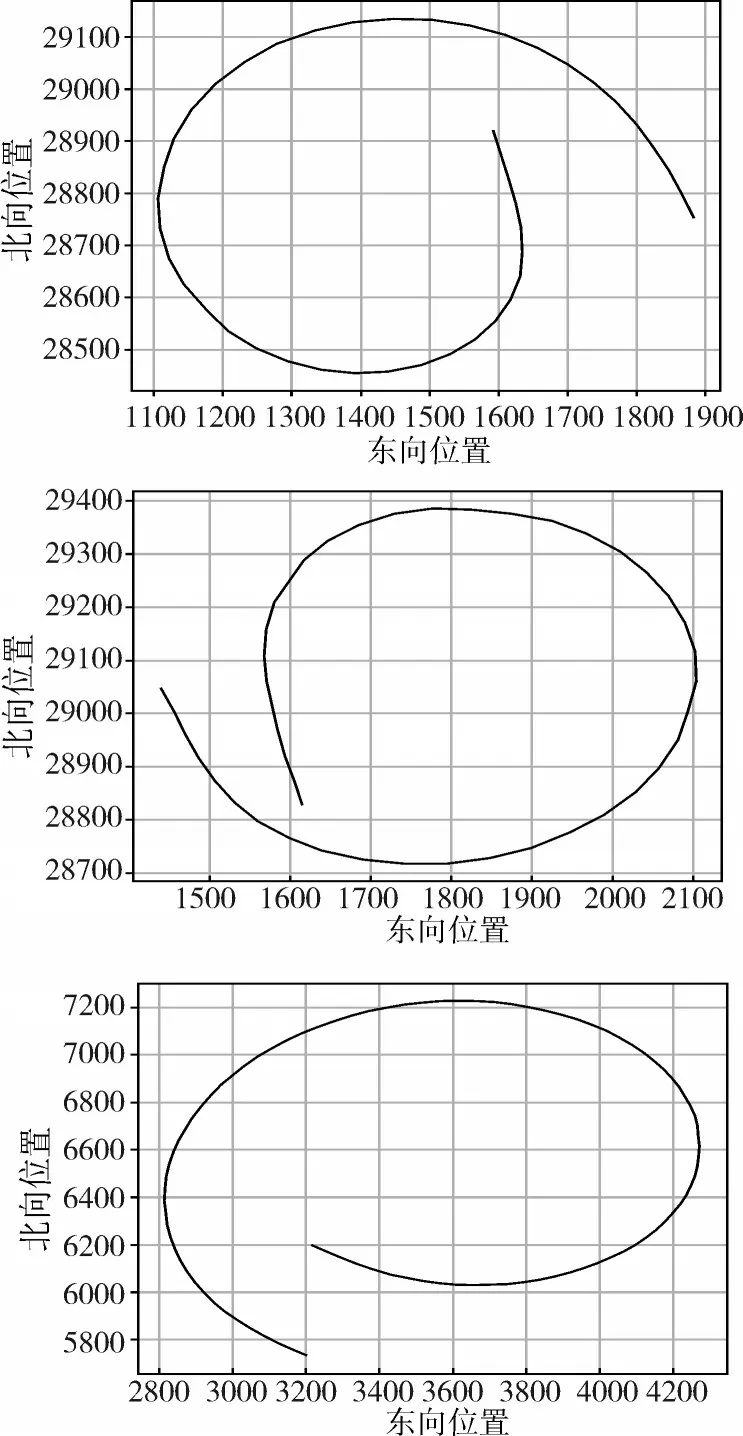
圖5 360°轉(zhuǎn)彎識別結(jié)果
5 結(jié)語
對于飛行科目的識別,兩級識別方案有一定程度的優(yōu)勢,各識別階段獨立進行,可采用權重的方式有效減少第一階段的誤差對第二階段的影響。在采用分割機制的基礎上進行飛行動作的識別,能提高整體識別精確度,并能解決真實飛行數(shù)據(jù)中存在的數(shù)據(jù)波動問題。雖然在分割點鄰近處的識別精度會下降,但不會對第二級飛行科目的識別造成影響。采用隨機森林進行飛行動作的識別時,僅對水平面內(nèi)的飛行動作進行識別能提高該階段的識別精度。對飛行科目的特點進行分析后,將飛行科目進行分類的方法能更好地對飛行數(shù)據(jù)進行識別。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
當代陜西(2019年11期)2019-06-24 03:40:28
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
光學精密工程(2016年6期)2016-11-07 09:07:19