小水電機組的變轉速運行方案及控制策略研究
2023-08-28 01:54:12文賢馗沈春和古庭赟熊軍超
中國農村水利水電 2023年8期
關鍵詞:控制策略
蘇 立,文賢馗,毛 成,沈春和,古庭赟,牛 唯,熊軍超
(貴州電網有限責任公司電力科學研究院,貴州 貴陽 550002)
0 引 言
我國水電資源儲量豐沛,發電站裝機容量在50 MW 及以下的被稱為小水電,我國小水電電站約有4.5 萬座,占全國總發電量的約5%,是農村電力的重要來源之一[1]。因地制宜地開發小水電資源對攔洪蓄水、改善能源結構、促進生態環境保護及山區貧困地區的脫貧致富等具有重要作用,對促進我國農村、經濟、環境協調發展具有十分重要的意義[2-5]。
小水電受水位變化大、來水量不定等因素影響[6],目前常規的固定轉速水力發電機組普遍存在運行效率低、調節品質差等問題,限制了小水電的健康發展[7]。章楓等人[7]指出峰谷時段對小水電發電產生了一定影響;彭文啟等人[8]分析了小水電的河流生態流量的重要性,該流量要求必然對機組發電量造成一定的影響和約束;陳志峰等人[9]以韶關地區為例分析了小水電機組并網與離網模式切換時對電網頻率的影響。
近年來,變速水力發電機組因其寬工況調節效率高、機組調節性能良好等優點受到行業青睞[10],在機組水頭、來流等參數大范圍變化造成機組偏離高效率運行區時,通過調整機組轉速使水輪機運行工況重新返回高效率運行區,從而可以提高機組運行效率、改善機組運行工況[11,12]。同時,采用合理的控制方式還可以在瞬態過程中通過快速改變機組轉速實現機組轉動動能的快速釋放或儲存,極大加快了機組功率的響應速度,對穩定電網頻率、避免水電機組功率反調、改善機組調節品質等方面均具有明顯優勢[13,14]。目前針對水電機組變速運行的研究主要針對容量較大的機組或抽水蓄能機組[15,16],對小水電機組采用變速運行的研究較少,對于適宜小水電機組的變速運行方案及控制策略尚不清楚。
1 變速運行方案及系統數學模型
工程中實現水力發電機組連續變速運行的方案主要有兩種,即如圖1 所示的基于部分功率變流器與雙饋電機的變速水力發電系統方案以及如圖2所示的基于全功率變流器與同步發電機的變速水力發電系統方案[17]。
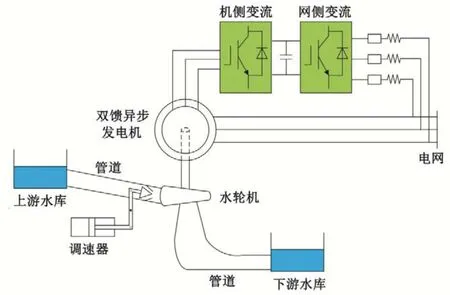
圖1 基于部分功率變流器與雙饋電機的變速方案Fig.1 Variable speed hydroelectric generating unit based on part power converter

圖2 基于全功率變流器與同步發電機的變速方案Fig.2 Variable speed hydroelectric generating unit based on full power converter
在圖1 的方案中采用了雙饋異步發電機,其轉子繞組通過變流器與電網連接,變流器容量需大于轉子繞組流過的功率,一般約為電機額定容量的30%,具有變流器容量小的優點,但存在電機結構復雜,機組轉速變化范圍小等缺點;在圖2的方案中采用了永磁同步發電機,電機定子通過變流器與電網相連,變流器容量需大于電機容量,電機容量相對較大,但電機結構簡單,且機組轉速變化范圍較大。
小水電機組的運行工況變化范圍一般較大,所需要的機組轉速變化范圍較大,同時機組結構應盡可能簡單且易維護。因此,如圖2 所示的基于全功率變流器與同步發電機的變速方案更適宜于小水電機組采用。
1.1 引水管道數學模型
在系統瞬態過程中引水管道的水擊現象造成機組水頭、流量等參數的瞬時變化,常采用水擊基本方程描述其瞬變過程[18],采用特征線法求解該水擊數學模型,以獲得更為精細的管道水擊過渡過程。其數學表達式為:
式中:Q為管道內流量;H為管道內能頭;L為沿管道中心線方向的長度;A為管道橫截面積;a為水擊波速;θ為管道傾放角;g為當地重力加速度;λ為管道沿程損失系數;d為管道橫截面積。
1.2 水輪機數學模型
認為水輪機動態過程中各時刻運行工況與對應的穩定工況特性一致,同時忽略水輪機的比尺效應,即可以采用水輪機模型綜合特性數據表征真機的動態過程[18],其數學模型為:
式中:Q11為水輪機單位流量;n11為水輪機單位轉速;M11為水輪機單位力矩;y為水輪機導葉開度;fq為水輪機模型流量特性關系;fm為水輪機模型力矩特性關系。
由水輪機相似性,單位參數與原型參數之間滿足:
式中:n為水輪機轉速;D1為水輪機標稱直徑;Ht為水輪機工作水頭;Qt為水輪機流量;Mt為水輪機力矩。
采用實測的水輪機模型綜合特性曲線數據作為式(2)的輸入與輸出表達式,以充分表達出水輪機動態過程中的非線性特征。
1.3 永磁同步發電機數學模型
永磁同步發電機在旋轉兩相坐標下的數學模型可以表示為[19]:
式中:usd為d 軸定子電壓;usq為q 軸定子電壓;Rs為定子繞組電阻;isd為d 軸定子電流;isq為q 軸定子電流;ωs為電機同步角速度;Lsd為d軸電感;Lsq為q軸電感;ψf為永磁體磁鏈。
電機的扭矩方程可以表示為:
式中:Me為發電機力矩;np為發電機磁極對數。
1.4 變流器數學模型
機側變流器的數學模型表示為:
式中:esd為發電機的d 軸感應電動勢;esq為發電機的q 軸感應電動勢;Ssd為機側變流器開關函數的d 軸分量;Ssq為機側變流器開關函數的q軸分量;Udc為直流母線電壓;C為直流母線電容;iL為直流母線流至網側變流器的電流。
網側變流器的數學模型表示為:
式中:ugd為網側變流器的出口d 軸電壓;ugq為網側變流器的出口q軸電壓;egd為電網d軸電壓;egq為電網q軸電壓;Rg為網側濾波電阻;igd為網側d軸電流;igq為網側q軸電流;Lgd為網側d軸濾波電感;Lgq為網側q 軸濾波電感;ωg為網側同步角速度;Sgd為網側變流器開關函數的d 軸分量;Sgq為網側變流器開關函數的q軸分量;idc為機側變流器流至直流母線的電流。
1.5 導葉隨動系統數學模型
考慮水輪機導葉位置約束及運動速度約束的水輪機導葉隨動系統數學模型,其結構框圖如圖3所示。

圖3 水輪機導葉隨動系統框圖Fig.3 Hydraulic turbine servo system block diagram
表示為:
式中:y為導葉開度;ymax為導葉開度最大限制值;ymin為導葉開度最小限制值;Ty為接力器響應時間常數;v為主配壓閥行程;s為拉普拉斯算子。
其中的主配壓閥行程表示為:
式中:vmax為主配壓閥行程最大限制值;vmin為主配壓閥行程最小限制值;yg為調速器的調節器輸出值;Tyb為主配壓閥響應時間常數。
2 控制策略分析
2.1 控制策略1
通過調速器控制水輪機導葉開度實現機組功率穩定、通過機側變流器控制水輪機轉速穩定、通過網側變流器控制變流器直流母線電壓及無功功率穩定的控制策略。其中調速器的控制策略框圖如圖4 所示。與機組定轉速不同,變速運行時機組轉速與電網頻率解耦,在該變速方案中采用變流器控制機組轉速穩定,因此采用調速器僅對機組有功功率進行控制。

圖4 策略1的水輪機調速器控制框圖Fig.4 The control block diagram of hydraulic turbine governor on strategy 1
調速器的調節器輸出值表示為:
式中:KP為調速器的比例增益;KI為調速器的積分增益;KD為調速器的微分增益;TD為微分項時間常數;Pr為機組功率給定值;P為機組功率測量值。
機側變流器用于控制水輪機轉速穩定,采用雙閉環矢量控制的控制策略框圖如圖5所示,其中內控制環為電流環,外控制環為轉速環,為降低永磁體的去磁現象,將d軸電流環的電流給定設置為0。

圖5 策略1的機側變流器控制框圖Fig.5 The control block diagram of machina side converters on strategy 1
最優轉速發生器為根據水輪機模型綜合特性曲線所得的最優轉速與機組水頭H、功率給定Pr之間的關系,表示為:
式中:fn為水輪機最優轉速關系;Ht為水輪機工作水頭;nr為水輪機最優轉速。
電流內環可以表示為:
式中:KP1為機側d 軸電流內環比例增益;KI1為機側d 軸電流內環積分增益;KP3為機側q 軸電流內環比例增益;KI3為機側q 軸電流內環積分增益;isq_r為機側q 軸電流給定;Δusd為機側d 軸解耦補償項;Δusq為機側q軸解耦補償項。
機側解耦補償項的表達式為:
由轉速外環得到的q軸電流給定值表示為:
式中:n為機組轉速測量值;KP2為機側q 軸轉速外環比例增益;KI2為機側q軸轉速外環積分增益。
網側變流器用于控制直流母線電壓及輸出至電網的無功功率,采用雙閉環矢量控制的控制策略框圖如圖6所示,其中內環為網側變流器電流控制環,d軸外環為直流母線電壓控制環,q軸電流給定值為輸出值電網的無功電流大小。
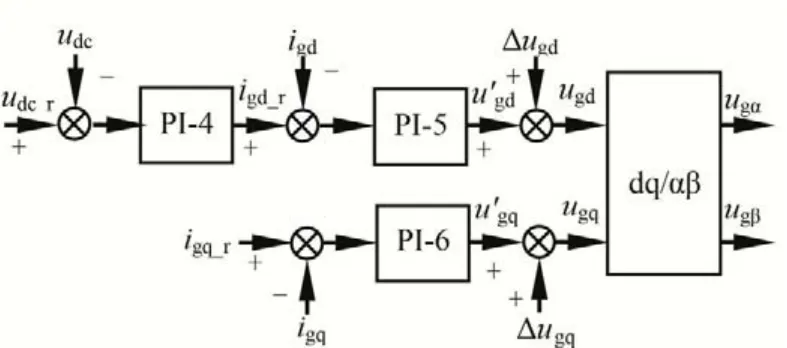
圖6 網側變流器控制框圖Fig.6 The control block diagram of grid side converters
電流內環的可以表示為:
式中:KP5為網側d 軸電流內環比例增益;KI5為網側d 軸電流內環積分增益;KP6為網側q 軸電流內環比例增益;KI6為網側q 軸電流內環積分增益;igd_r為網側d 軸電流給定;igq_r為網側q 軸電流給定;Δugd為網側d 軸解耦補償項;Δugq為網側q 軸解耦補償項。
機側解耦補償項的表達式為:
由電壓外環得到的d軸電流給定值表示為:
式中:udc_r為變流器直流母線電壓給定值;udc為變流器直流母線電壓測量值;KP4為網側d 軸轉速外環比例增益;KI4為網側d 軸轉速外環積分增益。
2.2 控制策略2
通過調速器控制水輪機導葉開度實現機組轉速穩定、通過機側變流器控制水輪機有功功率穩定、通過網側變流器控制變流器直流母線電壓及無功功率穩定的控制策略。其中調速器的控制策略框圖如圖7所示。
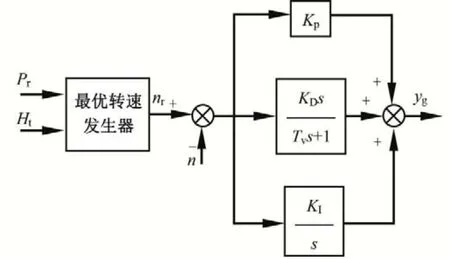
圖7 策略2的水輪機調速器控制策略框圖Fig.7 The control block diagram of hydraulic turbine governor on strategy 2
調速器的調節器輸出值表示為:
機側變流器用于控制水輪機有功功率穩定,采用雙閉環矢量控制的控制策略框圖如圖8所示,其中內控制環為電流環,外控制環為有功功率控制環,為降低永磁體的去磁現象,將d軸電流環的電流給定設置為0。
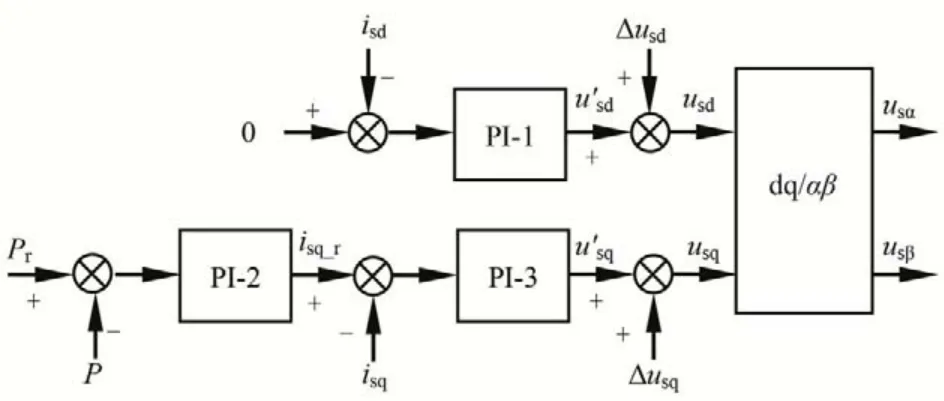
圖8 策略2的機側變流器控制策略框圖Fig.8 The control block diagram of machina side converters on strategy 2
電流內環的控制與控制策略1 相同,可以采用式(12)進行表示。有功功率外環可以表示為:
網側變流器用于控制直流母線電壓及輸出至電網的無功功率穩定,其控制與控制策略1的網側變流器控制相同,其控制框圖如圖6所示。
2.3 定轉速控制策略
傳統的定轉速機組接線方式中采用同步發電機,電機定子繞組直接與電網進行連接,采用調速器控制機組轉速及功率,調速器的控制策略框圖如圖9所示。

圖9 定轉速機組的水輪機調速器控制策略框圖Fig.9 The control block diagram of fix speed hydraulic turbine governor
此時調速器的輸出可以表示為:
式中:ep為調速器的調差率。
2.4 控制效果分析
以某典型水電站為例進行分析,該電站的引水管道長L=6.5 m,管道直徑d=3 m,水擊波速a=1 000 m/s,重力加速度g=9.8 m/s2,機組容量為700 kW,水輪機直徑D1=2.5 m,水輪機額定水頭為3 m,水輪機同步轉速nr=125 r/min,機組機械慣性時間常數Ta=7.5 s,定子繞組電阻Rs=0.011 7 Ω,定子繞組電感d軸分量Lsd=0.000 71 H,定子繞組電感q 軸分量Lsq=0.000 71 H,直流母線電容容量C=0.06 F,永磁體磁鏈ψf=1.35 T,電機磁極對數np=24,濾波電阻Rg=0.001 3 Ω,濾波電感的d 軸分量Lgd=0.000 415 H,濾波電感的q軸分量Lgq=0.000 415 H,機組并入無窮大電網,電網電壓的d 軸分量egd=332 V,電網電壓的q 軸分量egq=0 V,感應電動勢的d軸分量esd=0 V,感應電動勢的q軸分量esq=6.3 kV,調速器的調差率ep設置為0.04。
機組初始工況為額定工況,分別在控制策略1、控制策略2以及定速控制策略下功率給定降低20%,所得動態過程如圖10所示,對應的主要指標如表1所示。由于機組并入無窮大電網,動態過程中電網頻率、電壓等參數維持不變,不再展示電網相關參數的曲線。

表1 不同控制策略的動態指標Tab.1 Dynamic indexes of different control strategies

圖10 不同控制策略的動態過程Fig.10 Dynamic process of different control strategies
由仿真結果可以看出,采用傳統的定轉速運行策略時,機組轉速與電網頻率對應,由于針對小水電機組,可認為機組并入無窮大電網,在過渡過程中機組轉速不發生變化,但在調節過程中由于導葉動作機組功率發生了反調現象,其反調功率最大可達1.089 pu.,功率進入穩定值4‰且不再偏離的時間為9.7 s。
控制策略1 具有較快的轉速調節速度,且轉速波動范圍較小,調節過程中轉速無反方向波動過程,但功率調整速度較慢,且出現了極大的功率反調,最大功率可達2.67 pu.,造成這一現象的原因是機組功率降低時最優轉速下降,快速的轉速下降釋放了部分機組轉動能量,同時導葉關閉造成了短時間內的水輪機反調功率,這兩部分功率在短時間內產生疊加后造成發電機功率的快速增加形成極大的功率反調現象,這無疑對發電機提出了更大的挑戰。
控制策略2 具有較快的功率調節速度,僅在0.9 s 即可使機組功率進入穩定值的4‰內且不再偏離,同時功率調節過程無反調現象,但機組轉速調節速度較慢,且調節過程中出現短時的轉速反向波動。這是由于發電機輸出功率快速降低,造成能量以機械能的方式在機組轉速上累積,同時水輪機導葉關閉造成的反調增加了機械能的累積速度,但水輪機一般具有相對較大的飛輪力矩與良好的飛輪儲能能力,轉速上升僅為1.7%,伴隨著機組功率穩定后的導葉繼續調節機組轉速再逐步穩定至新的穩定值。
由上述的三種控制策略的對比可以看出,采用控制策略1與控制策略2 均可實現機組穩定運行工況點的轉速調整,即均滿足機組變速運行的穩定工況要求,控制策略2 同時還可以加快機組功率調節速度、消除功率反調現象、對發電機無特殊的附加要求,因此更加適宜于小水電機組的變速運行。
3 結 論
本文通過比對常見的水電機組變速方案,并根據小水電的特點得到了基于全功率變流器與同步發電機的變速水力發電系統方案更適宜小水電機組,并在此基礎上建立了小水電機組變速運行的調節系統數學模型,通過仿真分析了兩種不同的控制策略對機組調節過程及調節品質的影響,得到了如下結論。
(1)控制策略1 與控制策略2 均可以實現對機組功率和轉速的穩態運行控制,兩種策略對機組的穩定工況無特別影響。
(2)控制策略1具有更快的機組轉速調整過程,但存在較大的功率反調,且功率調節速度較慢。
(3)控制策略2具有更快的功率調節速度,同時其調節過程無功率反調的問題,更適宜于小水電機組采用。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
