偏環路運行的反應堆功率控制改進策略研究
2023-08-23 05:40:14毛玉龍
核科學與工程 2023年3期
葉 杰,毛玉龍,胡 巖
偏環路運行的反應堆功率控制改進策略研究
葉杰,毛玉龍,胡 巖
(中廣核研究院有限公司,廣東 深圳 518031)
為了提高反應堆的運行靈活性和促進反應堆系統設計滿足用戶的多樣需求,本文研究了在喪失一臺反應堆冷卻劑泵工況下的反應堆偏環路運行模式,提出了兩種改進策略來提升反應堆功率控制的響應速度,以應對反應堆偏環路運行時冷卻劑流量的快速下滑。一種策略是提高汽輪機降負荷速率,通過堆跟機的方法提高降功率的速度;另一種策略是直接下落預先選定的控制棒組。通過三維物理-熱工耦合的模擬方法,對兩種改進策略開展了論證比較。結果表明,通過細化控制棒分組,采取順序落棒的方式,可以較快地降低反應堆功率以匹配冷卻劑流量下滑,并在反應堆安全性和可運行性方面建立較好的平衡。
偏環路運行;快速降功率;流量下滑;反應堆冷卻劑泵
隨著核能發電份額占電網的比重不斷升高,電力用戶對新一代反應堆設計提出了更高的技術要求。特別是在應對預期運行事件方面,用戶普遍希望核電廠能夠具備更強的機動性和更高的靈活性。其中在機組喪失一臺反應堆冷卻劑泵(以下簡稱主泵)后的可運行性方面,歐洲用戶設定了較高的指標,如要求機組即使在滿功率運行時喪失任意一臺主泵也不應導致反應堆或汽輪機停閉。這一新要求體現了歐洲用戶對主泵故障及主泵故障后機組可運行性的重視。
目前三代反應堆(如VVER)和傳統的西門子公司設計的KWU等機型都已具備在停運一臺主泵的情況下仍然保持機組運行的能力[1,2](以下稱為“偏環路運行能力”)。而國內的大型壓水堆設計還都未實現這一功能。
本文以國內某百萬千瓦級三環路壓水堆為對象,開展適應偏環路運行的設計改進研究。重點研究了匹配冷卻劑流量快速下滑的反應堆功率控制的設計改進策略。
1 保護系統設計現狀
當前的壓水堆保護系統針對反應堆喪失冷卻劑流量的情況通常都設計了多重保護,一般包括環路冷卻劑低流量停堆保護、主泵斷路器斷開停堆保護和主泵低-低轉速停堆保護。當反應堆功率處于中、高功率水平時(如30%名義功率以上),只要一條冷卻劑環路或一臺主泵出現上述信號之一,反應堆都會自動觸發停閉。而在低功率情況下(30%名義功率以下),則允許一臺主泵停運。此時,反應堆只在出現兩條及以上環路低流量或兩臺及以上主泵斷路器斷開或低-低轉速時才會觸發緊急停堆。
之所以在出現反應堆冷卻劑流量降級時緊急停閉反應堆,是因為當前的棒控設計不能及時響應流量的變化,反應堆功率很難快速跟蹤和匹配流量的下滑。這會導致反應堆功率和流量的不匹配,惡化堆芯的傳熱,甚至可能引起燃料棒破損。
在開展研究之前,需要先取消環路低冷卻劑流量停堆信號、主泵轉速斷路器斷開停堆信號和主泵轉速低-低停堆信號,這三個信號通常在失流瞬態發生后的極短時間內達到(一般不會超過3 s)。為了給后續控制系統改進設計提供空間,本研究將取消單泵故障時觸發上述與流量和主泵本身直接相關的停堆信號。
為避免反應堆堆芯發生偏離泡核沸騰(DNB)和局部功率密度過高,反應堆設計了超溫D和超功率D停堆保護信號。當一臺主泵停運引起偏環路運行時,冷卻劑平均溫度將升高,堆芯進、出口溫差也將增加,這也可能會觸發超溫D或超功率D停堆保護。本研究將保留超溫D和超功率D停堆保護的設計,并用D的停堆裕量表征控制系統改進設計的有效性。D裕量不足時,反應堆仍可以通過超溫D或超功率D信號觸發停堆,以保證燃料的完整性。同時,為了使偏環路運行模式得以順利實施,又需要保證運行期間有足夠的D裕量,避免偏環路運行過程中觸發停堆。
2 設計改進策略
制約偏環路運行的主要因素是反應堆功率控制系統響應不及時,功率下降速度無法匹配流量下滑速度,因此本文重點研究如何使反應堆功率快速下降。
2.1 策略1——驅動插棒降功率(堆跟機)
策略1考慮反應堆功率控制總體上仍然保持正常運行的堆跟機模式,通過增加汽輪機負荷的變化速率來提升反應堆功率的響應速率。該策略的優點是對系統的實體改動較小,但是對堆-機的協調性要求較高。
當前設計的汽輪機快速降負荷功能以14.4 s為一個降負荷周期,以每分鐘200%額定負荷的下降速率運行0.4 s,再在14 s時間間隔內保持汽輪機負荷不變(見圖1)。這種降負荷方式,實際相當于每分鐘只下降了5%的額定負荷。這種間歇式降負荷設計的初衷是為了防止反應堆降功率過快引起堆芯過冷。但是對于偏環路運行的情況,流量下滑過程會引起堆芯過熱,5%/min的降負荷速率預計很難滿足功率下降的需求。為此,考慮在發生偏環路運行時,觸發新的汽輪機降負荷模式,本文考慮將汽輪機負荷以較大速率直接線性下降到目標值。根據棒控系統的設計,功率控制棒組隨后將跟隨汽輪機負荷的需求在控制棒驅動機構的電磁作用下快速下插,最終達到與汽輪機負荷相匹配的功率水平。但是控制棒的下插速率受控制棒驅動機構的物理設計限制。
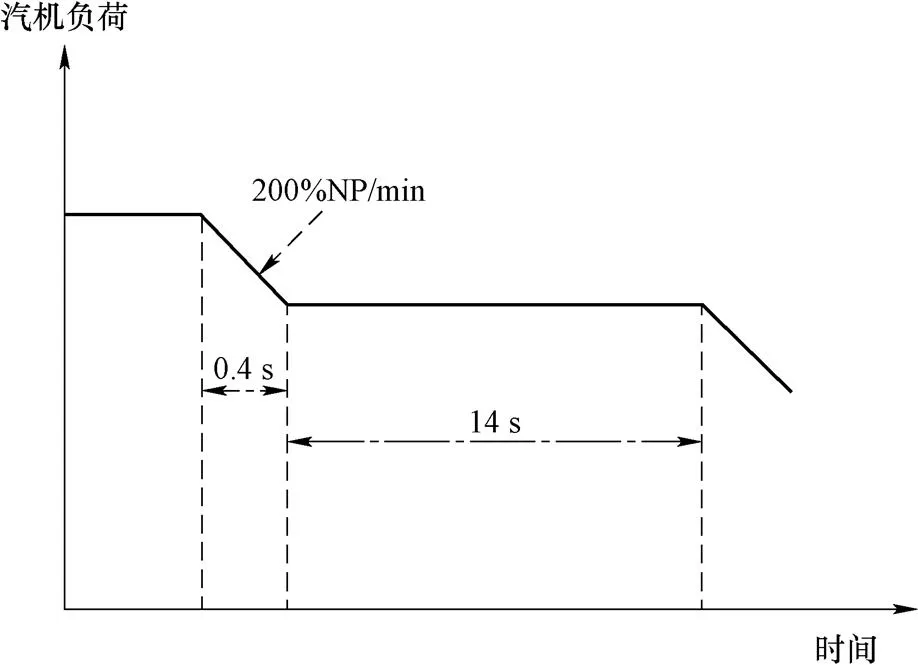
圖1 汽機快速降負荷運行模式
2.2 策略2——落棒降功率
策略2不再保持堆跟機模式,而是讓部分控制棒組以自由下落方式快速降低反應堆功率,而汽輪機負荷則按預置的速率快速線性下降,最終達到與反應堆功率相匹配的水平。該策略對反應堆功率的控制更加直接和快捷,但是對堆芯局部功率的擾動也更大。
對于落棒降功率模式,首先需要根據控制棒價值的計算,確定所需落棒的控制棒組。再根據控制棒組的價值和目標功率下落具體的控制棒組。對于落棒降功率的方式,考慮了以下原則:
(1)功率下降速度要及時。
(2)總的功率下降幅度要足夠。為了確保反應堆功率和堆芯冷卻劑流量的匹配,最終功率應降至65%額定功率以下。
(3)對堆芯功率分布造成的擾動較小。
(4)用于主動落棒的棒組應盡可能少以便于后續控制棒的重置。
原有設計的控制棒組有功率棒組、溫度調節棒組和停堆棒組。為了保證安全性和足夠的停堆裕量,以及保證后續機組運行時冷卻劑溫度有足夠的調節能力,快速降功率時不考慮主動下落停堆棒組和溫度調節棒組。因此,最終選擇功率棒組作為快速降功率控制的落棒棒組。原有功率控制棒組分為四個大組,分別是G1、G2、N1和N2棒組,其中G1和G2棒組為價值較小的灰棒組,N1和N2棒組為價值較大的黑棒組。由于N棒組價值較大,其下落會為后續恢復正常運行時重置控制棒增加操作的難度,因此優先選擇G棒組作為快速降功率的下落棒組。
根據初步的評估計算(見表1),僅下落G1棒組,反應堆功率可下降至名義功率的61%~73%,同時下落G1棒組和G2棒組時可將功率下降至37%~64%。因此,僅下落G棒組基本可以實現功率降至65%以下的目標。需要注意的,相對壽期初(BOL),壽期末(EOL)由于有更大的反應性反饋,落棒會引起更大的功率波動。
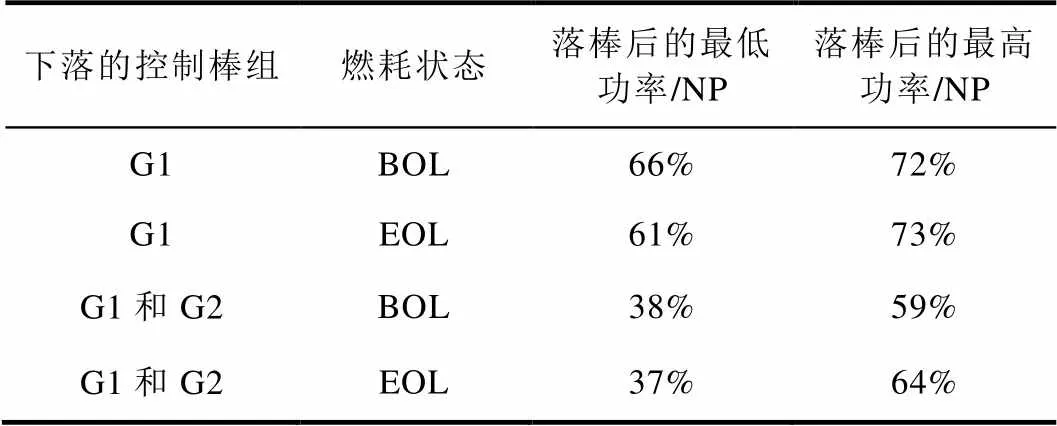
表1 控制棒組下落引起的功率變化
為了便于落棒后的控制棒重置,還要考慮控制棒組恢復正常運行時的位置。表2給出了正常運行時控制棒組在不同功率水平的設計位置。在40%~65%的功率范圍內,G棒組基本在堆芯下半部區域,而N棒組基本在堆芯上半部。因此,當目標功率在40%至65%的范圍時,在完成快速降功率后,需要將G棒組上提至正常運行對應的設計位置,而N棒組則需要下插至正常運行對應的設計位置。為了減少控制重置時操作的總步數,且保證N棒組盡量少動的原則,本研究將快速降功率的目標功率定為50%左右。
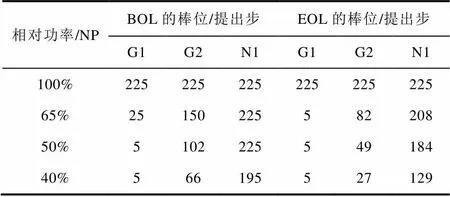
表2 不同功率水平的控制棒組位置
3 瞬態評估
3.1 評估方法
本研究利用SMART程序和MANTA程序[3],采用三維物理-熱工耦合的方法對上述改進策略開展論證分析。MANTA程序是最佳估算的熱工水力瞬態分析程序,它除了可以建立詳細的熱工水力分析模型外,還可以對控制系統進行詳細建模。SMART程序是核設計程序,堆芯的入口邊界條件由MANTA程序計算得到。通過SMART程序模擬堆芯每個燃料組件的中子學參數變化,再將計算的核功率傳回MANTA程序。通過三維物理-熱工的耦合方法,建立兩個程序的實時數據交換,可準確模擬偏環路運行條件下的堆芯狀態。
3.2 策略1的評估
對于策略1,對比了以下幾種快速降負荷方式:
(1)參考工況:保留當前設計的間歇式快速降負荷方式。
(2)研究工況:分別以100%NP/min、50%NP/min和33%NP/min的速率將汽輪負荷從100%NP線性下降至50%NP,完成降負荷的時間分別是30 s、60 s和90 s。
如圖2所示,汽輪機負荷按線性快速下降時,功率控制棒組可根據負荷需求按設計最大速率快速下插。三個研究工況的反應堆功率下降速率相似(見圖3),最終在瞬態后的100 s左右達到穩定。而參考工況由于整體的汽輪機負荷下降速率較慢,反應堆功率只在開始階段有快速下降,隨后功率棒組的下插由于偏離參考溫度過大而受到限制。
圖4和圖5分別給出了超溫D保護和超功率D保護的停堆裕量。對于參考工況,由于功率下降較慢,無法匹配停泵后的流量變化,導致D保護裕量明顯下降,為了安全必定需要觸發停堆保護。但是對于研究工況,超溫D保護的裕量勉強可維持,其中裕量最大的是50%NP/min線性降負荷的工況。而三個研究工況的超功率D保護則基本無裕量,在20多s就逼近零裕量。這說明在瞬態初始,反應堆功率的下降速度仍然無法跟上流量的下滑速度。
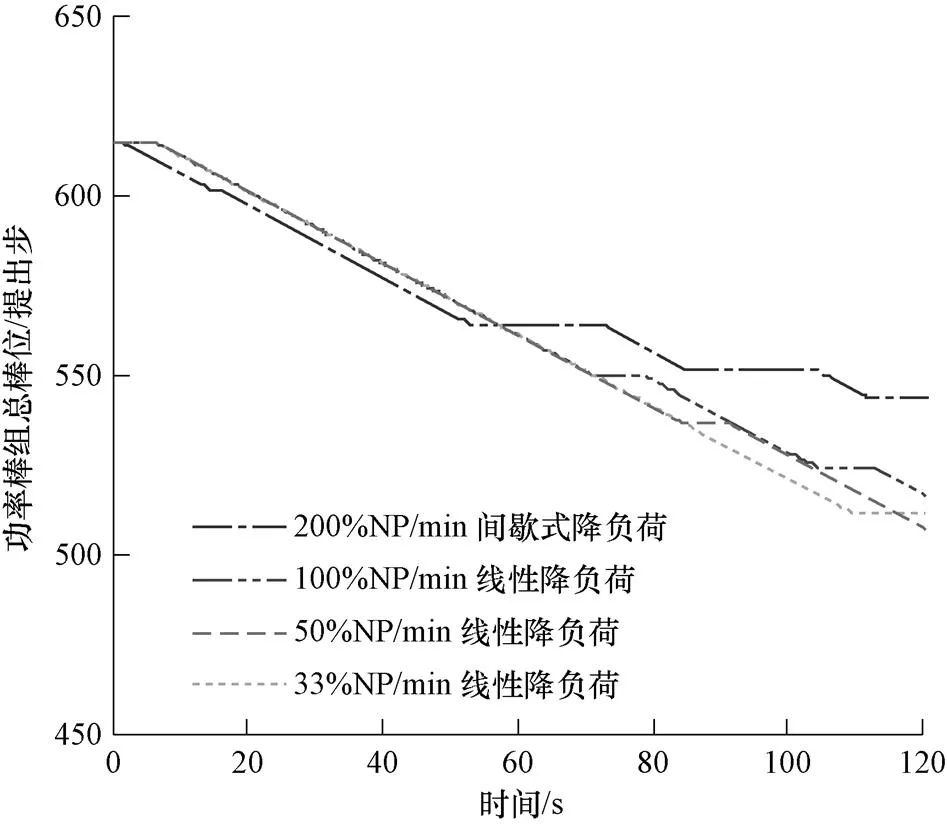
圖2 功率棒組總棒位(策略1)
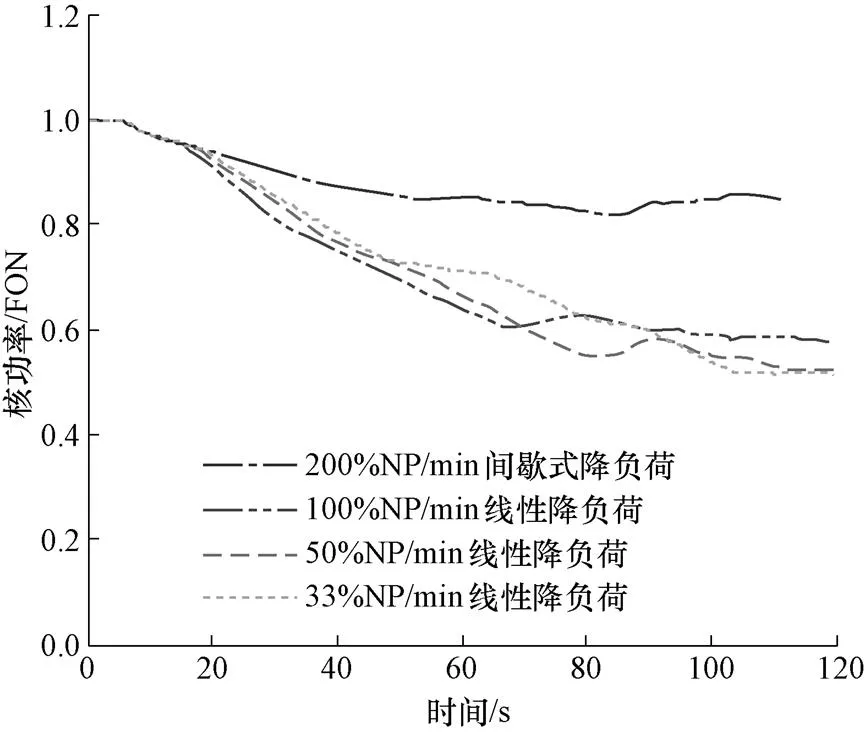
圖3 核功率(策略1)
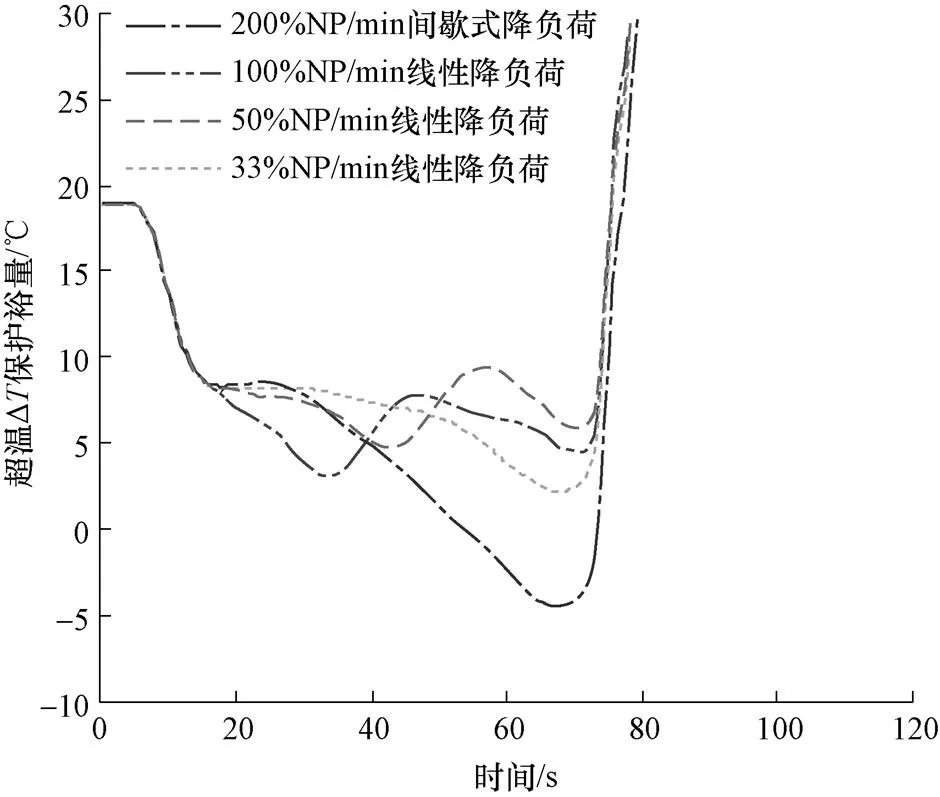
圖4 超溫 DT保護裕量(策略1)
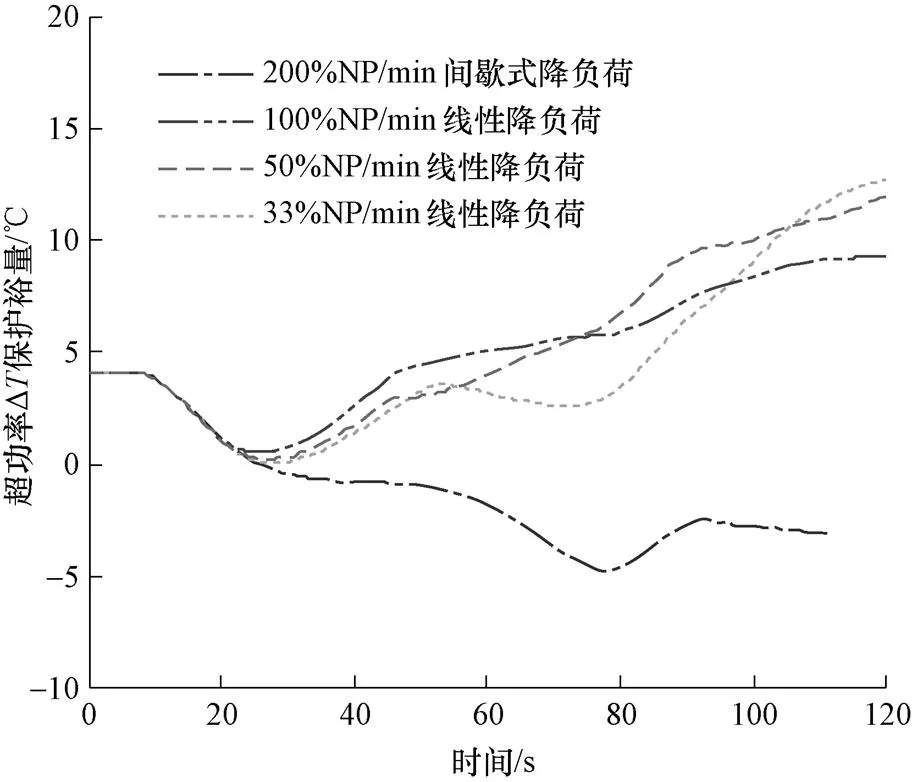
圖5 超功率 DT保護裕量(策略1)
3.3 策略2的評估
為了使反應堆功率在最短時間內大幅下降,考慮在觸發主動落棒時將選定的控制棒同時釋放使其自由下落。考慮控制棒組的價值,研究了同時下落G1棒組和G2棒組的情況。在得到一臺主泵停運信號后,觸發其同時下落。研究中將最終的目標功率和負荷目標初步都定為50%NP,在觸發快速降功率的同時也觸發快速降負荷,快速降負荷的下降速率初定為100%NP/min(線性下降)。落棒前溫度調節棒的初始棒位假定在調節帶中部。
如圖6所示,同時落棒時反應堆功率會非常迅速地下降。不管是在壽期初還是在壽期末,核功率都立即降至50%NP以下。但是很快由于反應性反饋效應,功率會有較大的反彈,其中,壽期末會反彈得更高。熱功率滯后核功率的響應,其下降的趨勢與核功率反彈后的趨勢一致(見圖7)。最終功率會穩定在50%NP左右。在落棒過程中,熱點因子(Q)和徑向熱通道因子(ΔH)都會快速增大,隨著落棒結束會有所下降(見圖8和圖9)。堆芯峰值線功率密度和Q相似,但在功率下降后,線功率密度會明顯減小(見圖10)。線功率密度與設計限值590 W/cm仍有較大裕量。對于壽期初工況,DH在低功率情況下會超過其限值(見圖14),但是同樣因為功率的降低,最終堆芯的最小DNBR會隨著功率下降而很快回升(見圖15),不會對堆芯產生不利后果。
圖11給出了落棒過程中軸向功率偏差(D)在運行圖中的變化位置。在同時落棒的過程中,功率分布迅速向堆芯下部傾斜。落棒結束后,功率分布又向堆芯上部反彈,并逐漸趨穩。對于壽期初的情況,D的變化范圍尚在運行圖內。但在壽期末,同時落棒的D超出運行圖左邊界。
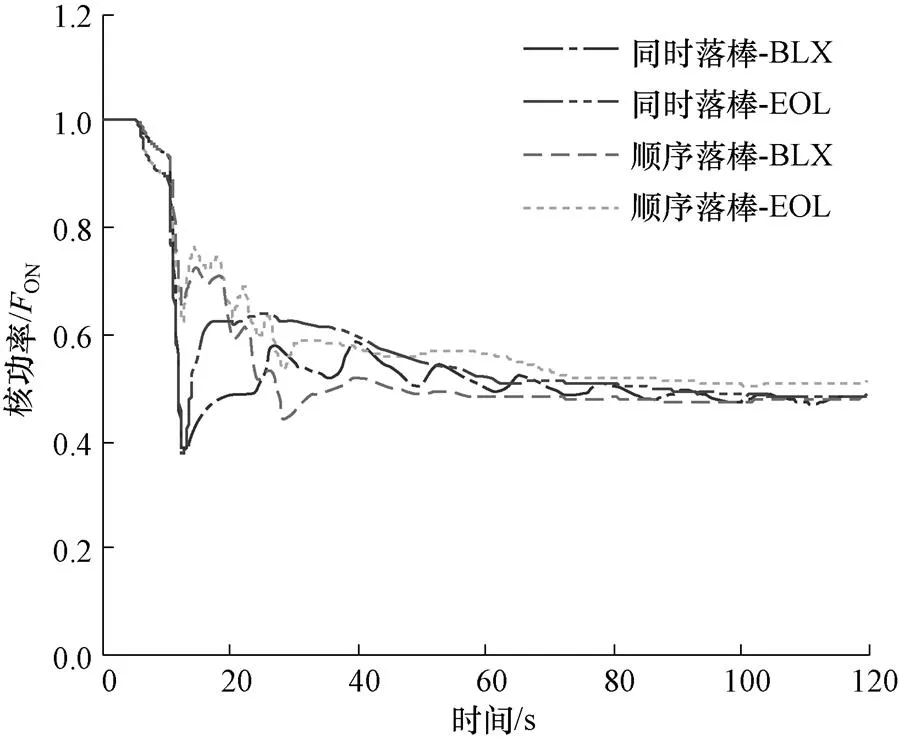
圖6 核功率(策略2)
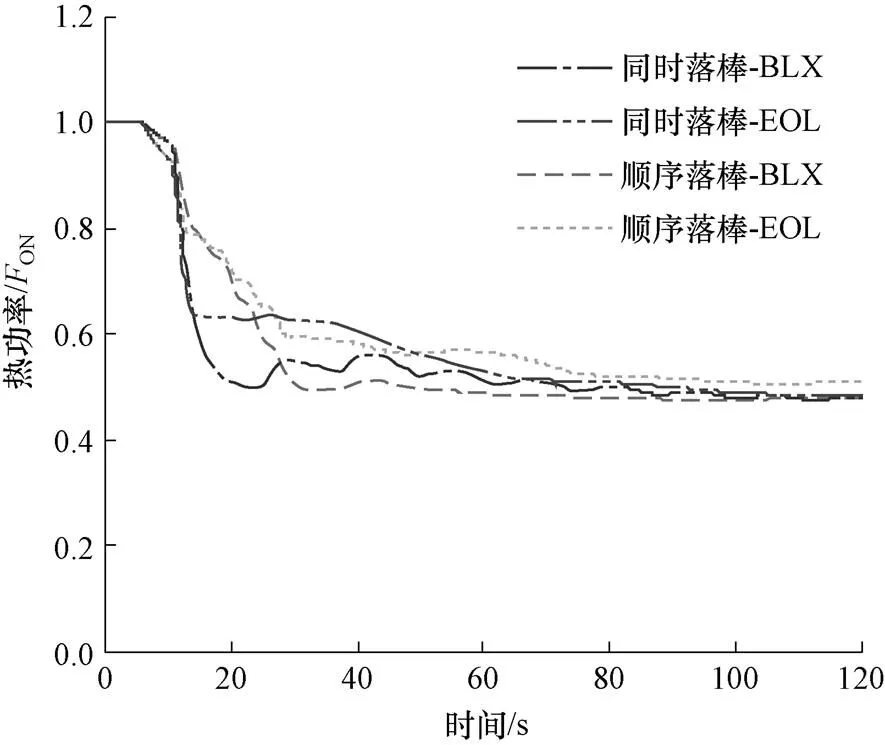
圖7 堆芯熱功率(策略2)
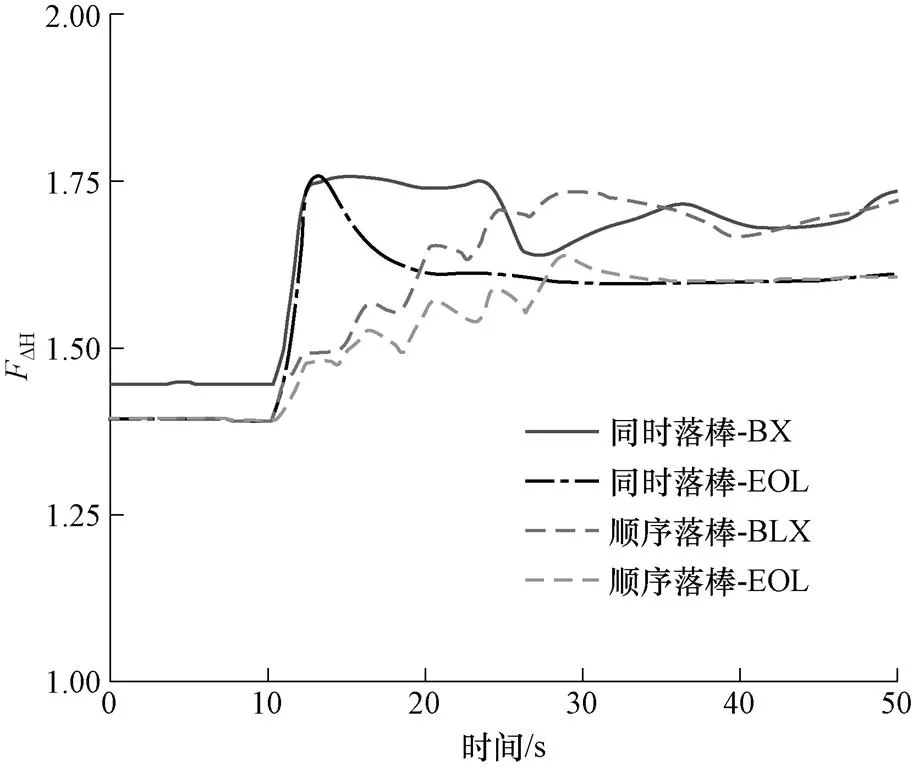
圖8 FDH(策略2)
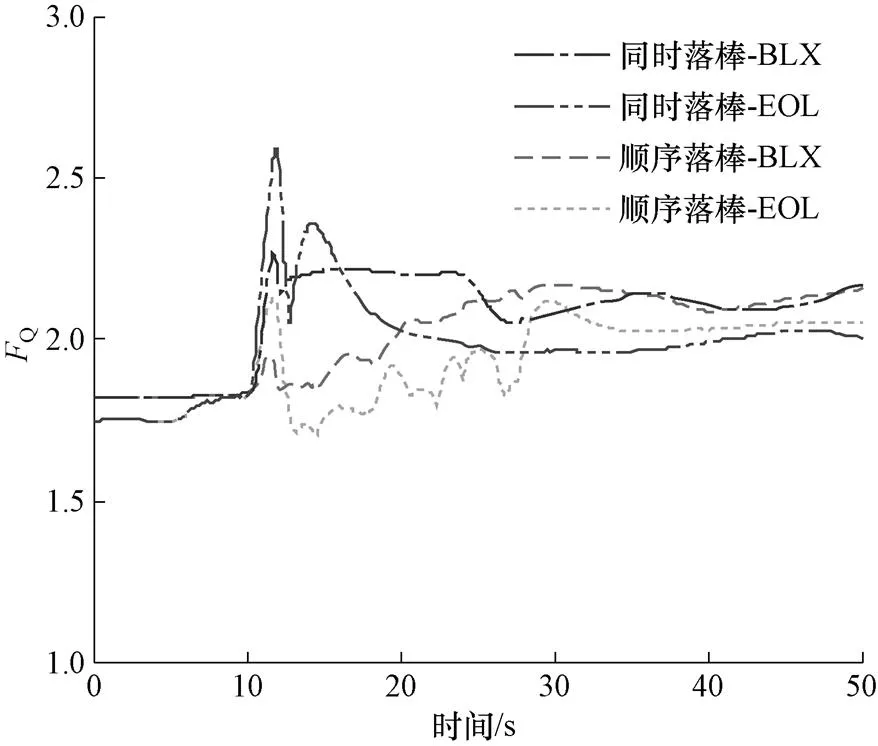
圖9 FQ(策略2)
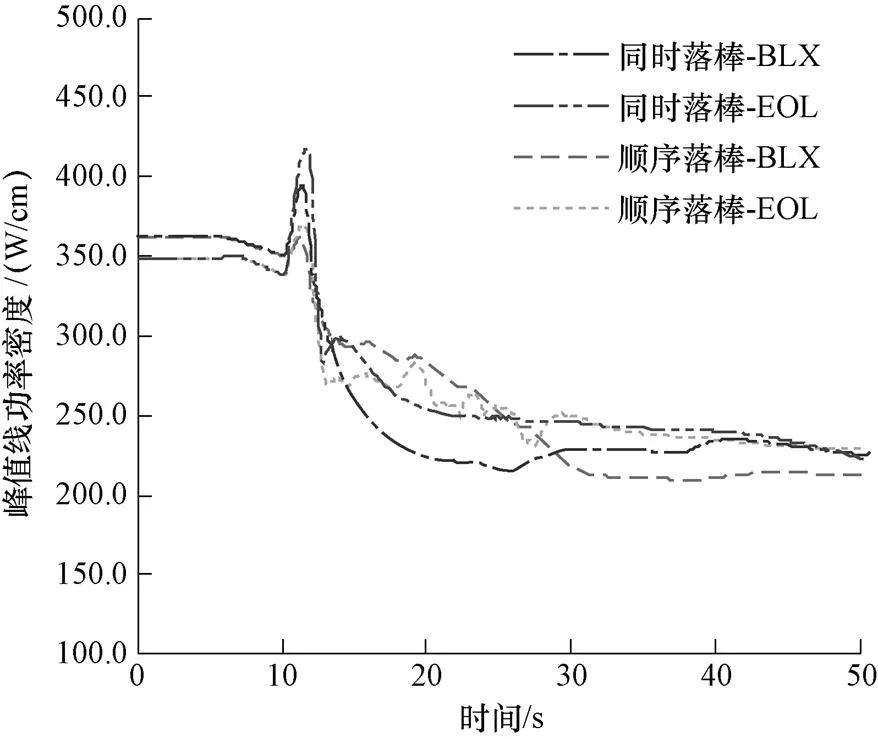
圖10 峰值線功率密度(策略2)
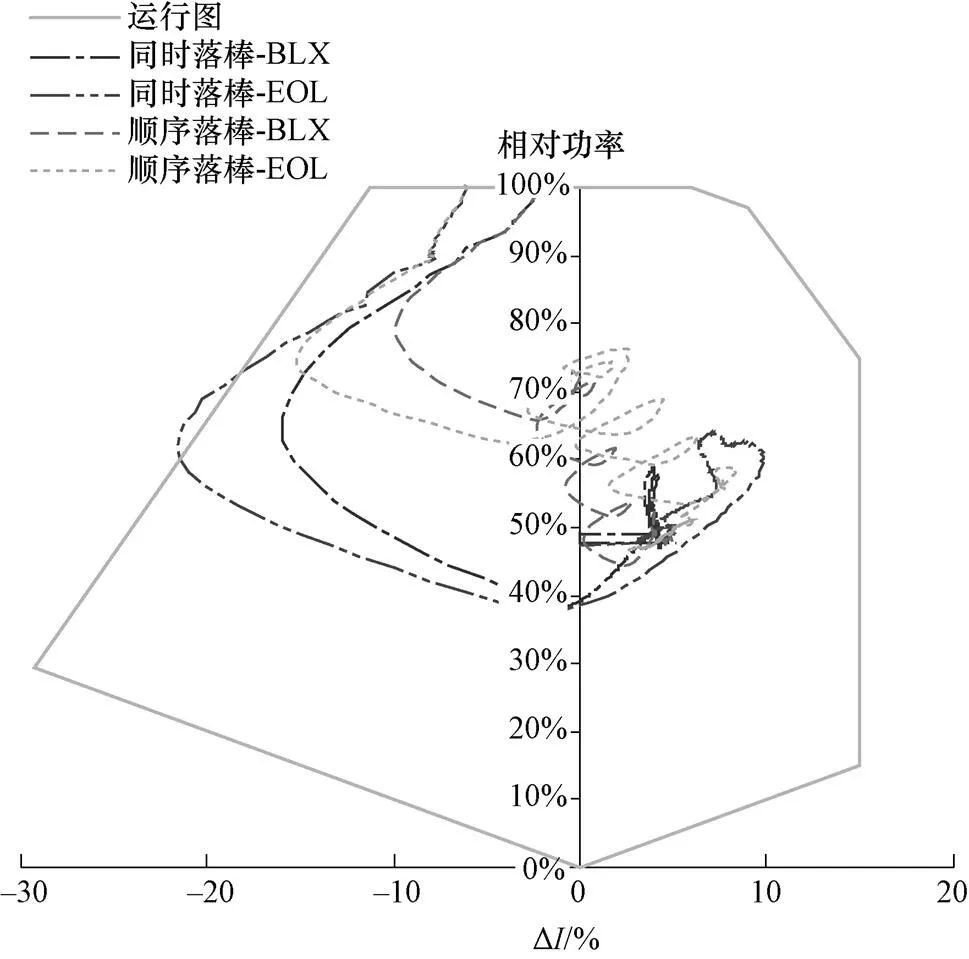
圖11 DI的變化范圍(策略2)
同時落棒時,超溫D保護具有較高的裕量(見圖12)。但是由于軸向功率偏差過大,導致超功率D保護的懲罰偏大,造成其裕量急劇減小,特別是在EOL時完全變成了負裕量(見圖13)。
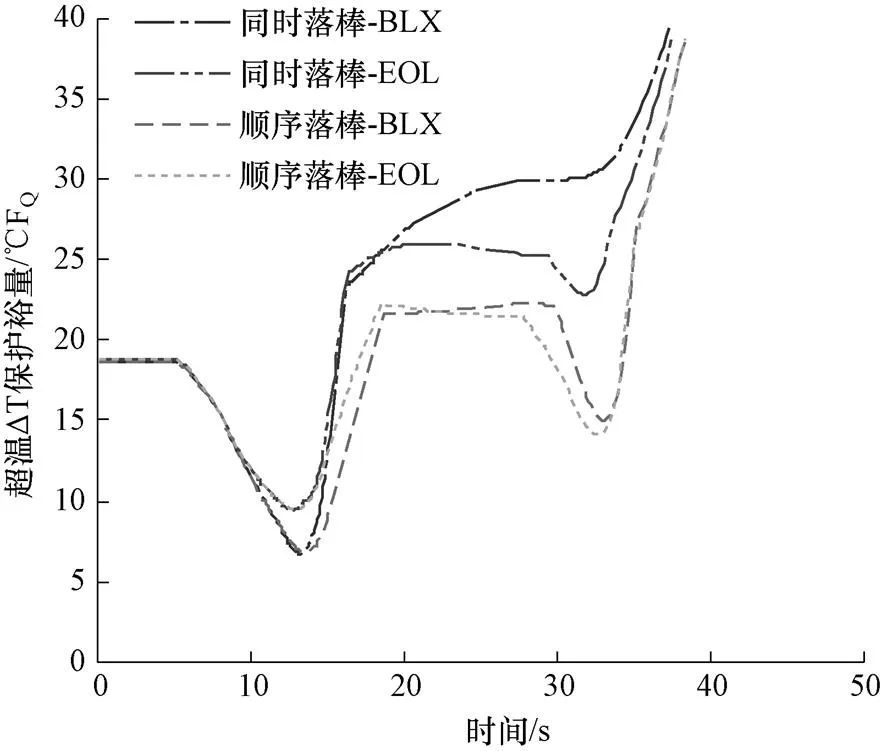
圖12 超溫DT 保護裕量(策略2)
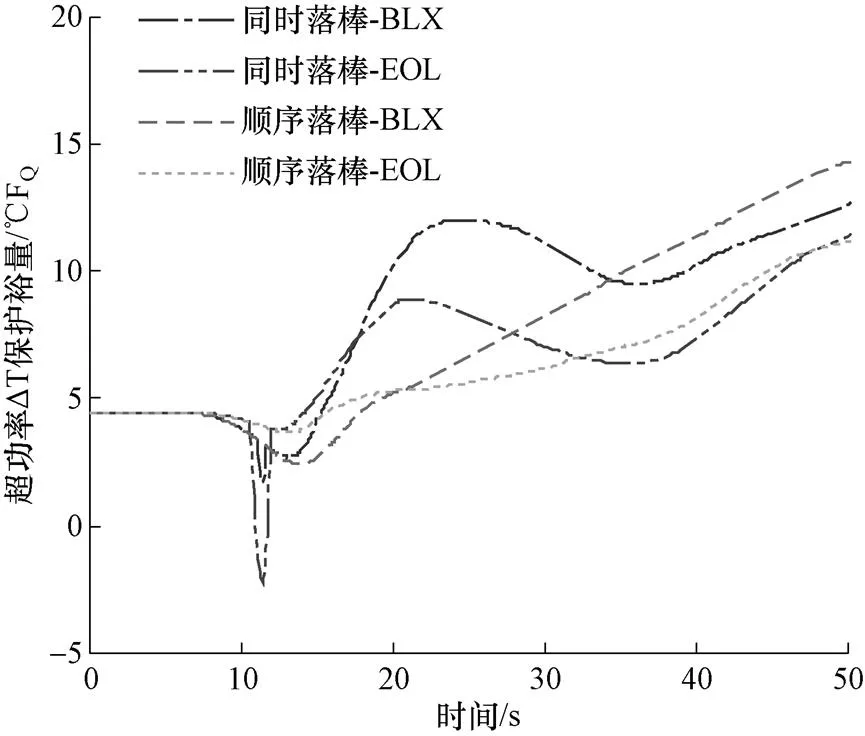
圖13 超功率DT保護裕量(策略2)
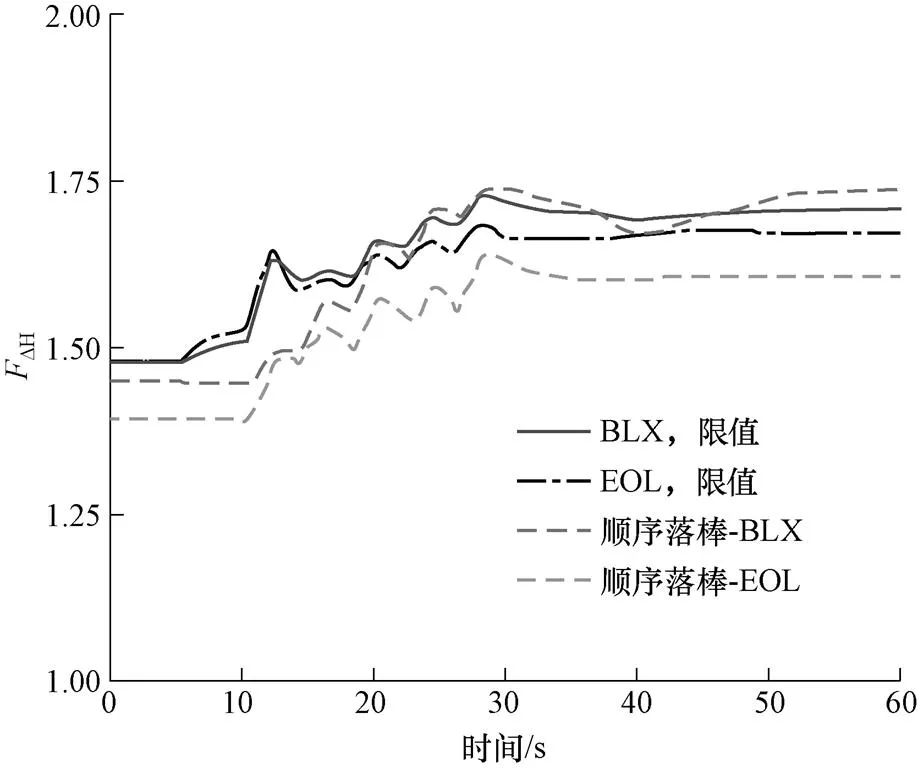
圖14 FΔH及其限值(策略2)
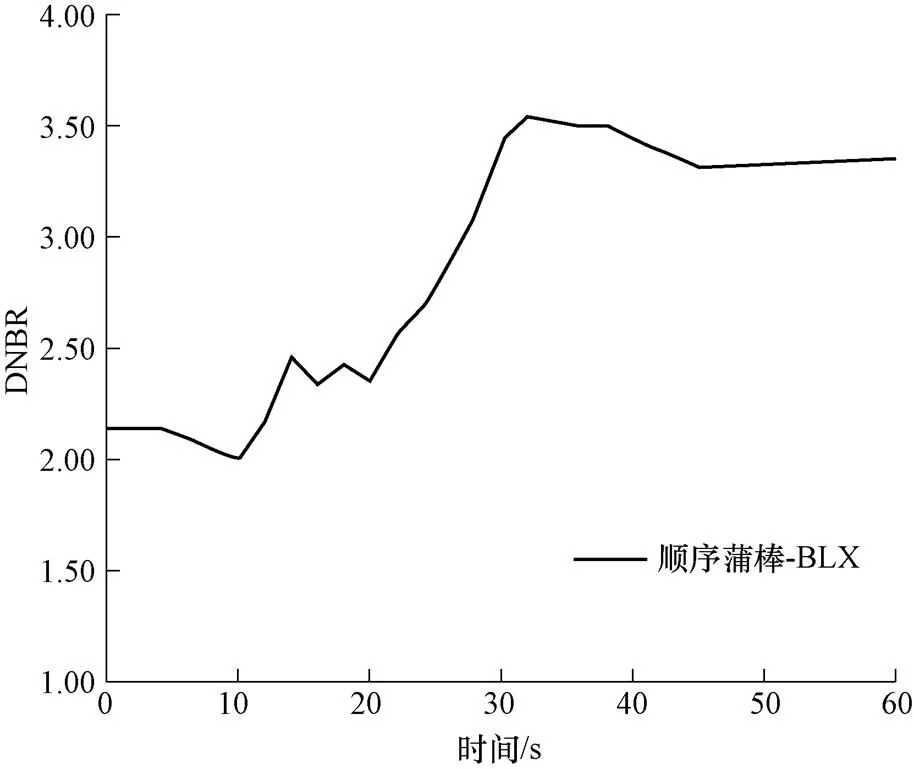
圖15 最小DNBR(策略2)
因此,在沒有軸向功率分布調節能力的情況下,同時落棒也無法滿足偏環路運行的要求。為了減少落棒對功率分布的影響,考慮將G2棒組分成4個子棒組G2a、G2b、G2c和G2d,并在觸發落棒時,按以下順序依次下落各棒組:G1、G2a、G2b、G2c和G2d。每隔4 s下落一組控制棒。
相對同時落棒,順序多批落棒引起的核功率波動幅度明顯變小(見圖6),熱功率的變化更加平穩(見圖7)。順序多批落棒對功率分布的擾動也更加緩和,D的變化區間更窄(見圖11),并將功率因子推遲至在低功率時出現(見圖8和圖9)。順序多批落棒過程中的超溫D保護裕量與同時落棒的裕量相當。但因為軸向功率分布偏差引起的懲罰明顯變小,順序落棒可以保證超功率D保護有足夠的裕量而不會觸發緊急停堆。從DNBR變化趨勢看,即使DH略有超限,順序落棒仍能實現功率與流量的相對匹配,保證堆芯安全。
4 結論
本文為提升壓水堆應對喪失一臺主泵的偏環路運行能力,針對反應堆功率控制進行了設計改進研究。通過瞬態評估得出以下結論:
(1)將汽輪機快速降負荷的模式調整為線性快速下降,通過堆跟機的方式,可提升反應堆功率的下降速度,并提升超溫D保護的裕量,但超功率D保護的裕量非常小,很難保證足夠的運行裕量。
(2)通過同時下落選定的功率棒組來實現快速降功率,雖然可以在極短時間內實現反應堆功率下降,但同時也會產生不利的軸向功率分布,導致超功率D保護的裕量不足。
(3)通過細化現有控制棒的分組,使其依次多批順序下落來實現快速降功率,可減少對功率分布的擾動,特別是減小軸向功率的偏差,可為反應堆運行提供更多的安全性。另外,順序多批落棒方式也不會觸發超溫D保護或超功率D保護停堆,確保足夠的運行裕量。
為了實現偏環路運行,除了對反應堆功率控制進行改進外,還需要開展反應堆保護系統、蒸汽發生器水位控制等相關設計的配套改進研究。
[1] Le Dai Dien,Do Ngoc Diep. Verification of VVER-1200 NPP Simulator in Normal Operation and Reactor Coolant Pump Coast-Down Transient[J]. World Journal of Engineering and Technology,2017,5:507-519.
[2] M. F. Lozano,P. Moreno,et al. Assessment of a Reactor Coolant Pump Trip for TRILLO NPP with RELAP5/MOD3. 2,NUREG/IA-0177[R]. Washington:U. S. NRC,2000.
[3] 馮英杰,李昌瑩,肖紅,等. 基于MANTA/SMART三維物理熱耦合的落棒事故分析[J]. 原子能科學技術,2020,54(2):281-287.
Study on the Reactor Power Control Improvement Strategy for Partial Loop Operation
YE Jie,MAO Yulong,HU Yan
(China Nuclear Power Technology Research Institute Co.Ltd,Shenzhen of Guangdong Prov.518031,China)
To improve the reactor operational flexibility and to meet diverse requirements of utilities, the partial loop operation mode caused by the loss of one reactor coolant pump has been studied. To match the rapid rate of coolant flow coast-down, two improvement strategies of increasing reactor power control response speed are presented. One strategy is to increase the turbine load reduction rate ant then induce a fast reactor power reduction with the reactor-follow-turbine control mode. The other strategy is to drop pre-selected control banks directly. Two strategies are evaluated and compared with the three dimensional physical-thermal coupling simulation method. The results show that the reactor power could be reduced fast enough to match the rate of coolant flow coast-down and finally a balance between safety and operability could be achieved.
Partial loops operation; Fast power reduction; Flow coast-down; Reactor coolant pump
TL364.4
A
0258-0918(2023)03-0537-07
2022-07-20
葉杰(1984—),男,浙江青田人,高級工程師,現從事反應堆熱工水力和安全分析方面研究
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數學大世界(2018年1期)2018-04-12 05:39:14
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16