“華龍一號(hào)”不銹鋼覆面焊縫可視自動(dòng)化射線(xiàn)檢驗(yàn)技術(shù)應(yīng)用
2023-08-23 06:15:04韓景濤
核科學(xué)與工程 2023年3期
韓景濤
“華龍一號(hào)”不銹鋼覆面焊縫可視自動(dòng)化射線(xiàn)檢驗(yàn)技術(shù)應(yīng)用
韓景濤
(四川中核艾瑞特工程檢測(cè)有限公司,四川 綿陽(yáng) 621000)
X射線(xiàn)檢驗(yàn)在核電廠(chǎng)核島鋼襯里及不銹鋼覆面水池等薄板焊接施工部位檢測(cè)應(yīng)用非常廣泛。本文結(jié)合“華龍一號(hào)”堆型不銹鋼覆面水池焊縫射線(xiàn)檢測(cè)量大、施工周期緊、探傷作業(yè)窗口少、常規(guī)射線(xiàn)檢驗(yàn)方法效率低、勞動(dòng)強(qiáng)度大、操作班組配置數(shù)量高等不利因素,結(jié)合不銹鋼施工環(huán)境特性,開(kāi)展可視自動(dòng)化X射線(xiàn)檢驗(yàn)技術(shù)應(yīng)用,有效實(shí)現(xiàn)X射線(xiàn)探傷作業(yè)的遠(yuǎn)程操控,降低人員受照輻射劑量,形成了“可視化、自動(dòng)化、標(biāo)準(zhǔn)化、高效化”X射線(xiàn)檢驗(yàn)設(shè)備裝置,拓展了自動(dòng)化創(chuàng)新射線(xiàn)檢驗(yàn)工藝技術(shù)在“華龍一號(hào)”工程實(shí)體上有效推廣應(yīng)用。
“華龍一號(hào)”;X射線(xiàn)檢驗(yàn);可視化操控;自動(dòng)化設(shè)備;技術(shù)應(yīng)用
“華龍一號(hào)”堆型是中國(guó)自主研發(fā)第三代核電技術(shù),是中國(guó)核電工程技術(shù)“走出去”推薦堆型。“華龍一號(hào)”土建工程,其射線(xiàn)檢驗(yàn)工作量較M310堆型增加10倍以上,單堆不銹鋼覆面水池的射線(xiàn)檢驗(yàn)拍片量達(dá)5~6萬(wàn)余張,且均在工程關(guān)鍵路徑,而項(xiàng)目整體建設(shè)工期沒(méi)有增加。為確保工程進(jìn)度有序推進(jìn),在相對(duì)緊迫建設(shè)周期和探傷窗口內(nèi)完成急劇增加的射線(xiàn)探傷量,迫切需要改進(jìn)現(xiàn)有、在用的常規(guī)射線(xiàn)檢驗(yàn)工藝方法和設(shè)備,提高檢測(cè)功效,實(shí)現(xiàn)自動(dòng)化射線(xiàn)檢驗(yàn)技術(shù)于核電廠(chǎng)工程實(shí)體的創(chuàng)新應(yīng)用。推動(dòng)“華龍一號(hào)”不銹鋼覆面射線(xiàn)檢驗(yàn)技術(shù),具備遠(yuǎn)程可視化、操控自動(dòng)化、工藝標(biāo)準(zhǔn)化、探傷高效化的創(chuàng)新發(fā)展。
實(shí)現(xiàn)自動(dòng)化的射線(xiàn)檢驗(yàn)工藝,首先應(yīng)有適合的設(shè)備、制定有效的專(zhuān)項(xiàng)檢驗(yàn)工藝。X射線(xiàn)探傷機(jī)需要具備可視化自動(dòng)行走,以及按照焊縫實(shí)際有效片長(zhǎng)完成射線(xiàn)機(jī)步進(jìn)范圍的遠(yuǎn)程操控升降裝置,屬于兩個(gè)不同的設(shè)備個(gè)體,如何通過(guò)適當(dāng)?shù)牟鹦逗透难b,使可視自動(dòng)化設(shè)備裝置具備輕便、體積小、X射線(xiàn)透照功率強(qiáng)度滿(mǎn)足要求、可實(shí)現(xiàn)連續(xù)探傷作業(yè)、遠(yuǎn)程操控視頻清晰、性能穩(wěn)定、裝卸便捷、操作安全穩(wěn)固等性能要求,形成融為一體的可視自動(dòng)化X射線(xiàn)檢驗(yàn)裝置,并綜合應(yīng)用于“華龍一號(hào)”堆型不銹鋼水池,不同焊接部位的射線(xiàn)檢驗(yàn)。尤其是創(chuàng)新融合機(jī)型自動(dòng)化檢驗(yàn)設(shè)備,應(yīng)能實(shí)現(xiàn)三維空間操控自動(dòng)運(yùn)行、減少自動(dòng)化檢測(cè)盲區(qū)、確保焊縫射線(xiàn)檢驗(yàn)全覆蓋及有效的搭接,避免漏檢、錯(cuò)檢質(zhì)量風(fēng)險(xiǎn)是研究的核心難點(diǎn)。
1 常規(guī)射線(xiàn)檢驗(yàn)存在應(yīng)用局限與不足
核電廠(chǎng)不銹鋼敷面水池焊縫分布多,焊接量大,且不同功能用途的房間,其結(jié)構(gòu)形式也各不相同,唯需要進(jìn)行射線(xiàn)檢驗(yàn)部位的焊縫形式均為平(底板焊縫)、橫、立(池壁焊縫)三種形式焊接位置。
早期不銹鋼水池常規(guī)射線(xiàn)檢驗(yàn)方式,采用結(jié)合利用敷面板焊接時(shí)鋪設(shè)滿(mǎn)堂腳手架、跳板等工裝設(shè)施,為探傷人員行走和架設(shè)X射線(xiàn)機(jī)作業(yè)的平臺(tái)。腳手架搭設(shè)材料用量多、人工成本高,最大的不利是不銹鋼敷面水池除了對(duì)焊接質(zhì)量要求高,還對(duì)施焊環(huán)境、敷面板清潔度有較高的要求,腳手架的日常維護(hù)管理及完工拆除工程量大,存在異種材質(zhì)間磕碰、擦傷、劃痕,對(duì)不銹鋼敷面板形成潛在的二次污染腐蝕風(fēng)險(xiǎn)。
不銹鋼水池對(duì)接焊縫要求進(jìn)行100%射線(xiàn)檢驗(yàn),采用常規(guī)射線(xiàn)檢驗(yàn)方式,探傷班組人力投入大,核電現(xiàn)場(chǎng)批準(zhǔn)射線(xiàn)探傷許可作業(yè)窗口時(shí)段緊,且存在人員操作技能不穩(wěn)定等不利因素,嚴(yán)重制約和影響了實(shí)際檢測(cè)功效需求。因此,迫切需要通過(guò)采用自動(dòng)化檢測(cè)設(shè)備、結(jié)合“數(shù)字華龍”建設(shè)理念,積極推進(jìn)無(wú)損檢測(cè)自動(dòng)化創(chuàng)新工藝方法的研究與應(yīng)用。
2 可視自動(dòng)化X射線(xiàn)檢測(cè)裝置研制技術(shù)內(nèi)容
結(jié)合漳州核電“華龍一號(hào)”工程在建項(xiàng)目為依托,梳理核島內(nèi)各不銹鋼水池結(jié)構(gòu)特點(diǎn)及焊縫位置等工況,突出X射線(xiàn)自動(dòng)化檢驗(yàn)設(shè)備工藝性能、可遠(yuǎn)程、可視化的操控要點(diǎn),以降低勞動(dòng)強(qiáng)度和用工、減少輻照危害、提高拍片效率,達(dá)到有效防控常規(guī)射線(xiàn)檢驗(yàn)過(guò)程中存在,高空作業(yè)架設(shè)與搬運(yùn)探傷設(shè)備,以及人員高空行走、攀爬墜落等潛在高風(fēng)險(xiǎn)因素為研究重點(diǎn)。研制技術(shù)內(nèi)容如下:
(1)結(jié)合“華龍一號(hào)”核電堆型不銹鋼水池/箱結(jié)構(gòu)焊接特點(diǎn)及施工環(huán)境,結(jié)合麥克納姆輪獨(dú)有的靈活運(yùn)轉(zhuǎn)性能,在地面行進(jìn)可達(dá)性非常高,可全方位移動(dòng)等性能原理,研究開(kāi)發(fā)可視自動(dòng)化AGV機(jī)器人三維空間運(yùn)行裝置、射線(xiàn)機(jī)夾持穩(wěn)固工裝一體化操控射線(xiàn)檢驗(yàn)設(shè)備;
(2)會(huì)同X射線(xiàn)機(jī)生產(chǎn)廠(chǎng)合作研發(fā),對(duì)X射線(xiàn)探傷機(jī)控制器及機(jī)身,在原有應(yīng)用基礎(chǔ)上進(jìn)行針對(duì)性的改造升級(jí),使研制設(shè)備的自動(dòng)化控制系統(tǒng)與其實(shí)現(xiàn)通信聯(lián)動(dòng)的遠(yuǎn)程操控功能;
(3)紅外線(xiàn)十字定焦對(duì)中裝置,是實(shí)現(xiàn)X射線(xiàn)探傷機(jī)遠(yuǎn)程操控、可視自動(dòng)化檢驗(yàn)的核心。曝光點(diǎn)的準(zhǔn)確定位是確保射線(xiàn)底片缺陷返修定位的關(guān)鍵依據(jù),供操作者及時(shí)掌握自動(dòng)化檢驗(yàn)設(shè)備運(yùn)行中,隨時(shí)核查射線(xiàn)探傷機(jī)對(duì)應(yīng)焊縫檢測(cè)部位是否與實(shí)際待檢位置準(zhǔn)確匹配;
(4)根據(jù)射線(xiàn)檢驗(yàn)透照方式、射線(xiàn)特有散射影響、焊縫100%射線(xiàn)檢驗(yàn)要求每張底片有效搭接及一次透照有效片長(zhǎng)等技術(shù)要求,設(shè)計(jì)自動(dòng)化射線(xiàn)檢驗(yàn)設(shè)備進(jìn)行每張焊縫透照長(zhǎng)度的停留曝光時(shí)間和步進(jìn)范圍,與焊縫實(shí)際布片張數(shù)序號(hào)位置準(zhǔn)確對(duì)應(yīng)性的研究;
(5)針對(duì)不銹鋼覆面水池預(yù)留拍片孔規(guī)格與分布特點(diǎn),設(shè)計(jì)適當(dāng)寬度、厚度、長(zhǎng)度,具備相應(yīng)韌性“布片帶”,替代常規(guī)鋼帶布片方式,減輕鋼帶重量,增強(qiáng)布片可輕便進(jìn)入及懸掛性和貼合性。并依據(jù)所需透照有效片長(zhǎng)的要求,在新型布片帶上隔段設(shè)置穩(wěn)固射線(xiàn)底片暗袋夾,便于布片作業(yè)時(shí)快速放入和底片曝光前后的抽取替換。
3 遠(yuǎn)程可視操控AGV機(jī)器人射線(xiàn)自動(dòng)化檢驗(yàn)設(shè)備樣機(jī)模型
為了實(shí)現(xiàn)“華龍一號(hào)”堆型核電廠(chǎng)“高效率、多創(chuàng)新、高質(zhì)量”創(chuàng)新發(fā)展建設(shè)需求,無(wú)損自動(dòng)化檢驗(yàn)技術(shù)必須與自動(dòng)化焊接技術(shù)的應(yīng)用形成同步跟進(jìn)提升。在原有理論基礎(chǔ)上開(kāi)展了多次設(shè)計(jì)優(yōu)化和現(xiàn)場(chǎng)實(shí)際應(yīng)用論證,最終形成可視、遠(yuǎn)程、自動(dòng)化操控AGV機(jī)器人射線(xiàn)檢驗(yàn)設(shè)備系列裝置。
3.1 適用于底板(地面平縫位置)可視自動(dòng)化射線(xiàn)檢驗(yàn)設(shè)備
(1)射線(xiàn)機(jī)透照窗口的位置朝向,可對(duì)不銹鋼水池地面底板部位的長(zhǎng)直焊縫實(shí)施連續(xù)步進(jìn)式100%射線(xiàn)檢驗(yàn)(見(jiàn)圖1)。
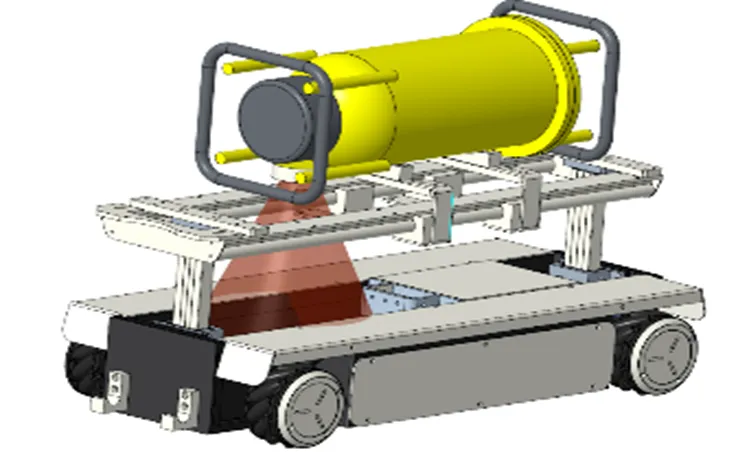
圖1 底板長(zhǎng)直焊縫自動(dòng)化射線(xiàn)檢驗(yàn)
(2)對(duì)于不銹鋼水池底板地面邊角處、池壁墻面拐角處,即池壁墻面與底板地面交匯拐角處焊縫,通過(guò)將X射線(xiàn)機(jī)延伸調(diào)整至側(cè)向合適位置,滿(mǎn)足射線(xiàn)機(jī)透照窗口對(duì)待檢部位的有效輻射區(qū),即可進(jìn)行該處部位的連續(xù)射線(xiàn)檢測(cè),實(shí)現(xiàn)池壁地面拐角等部位無(wú)死角探傷覆蓋(見(jiàn)圖2、圖3、圖4)。
3.2 適用于池壁(墻面橫縫位置)可視自動(dòng)化射線(xiàn)檢驗(yàn)設(shè)備
對(duì)于池壁橫向焊縫位置,X射線(xiàn)檢驗(yàn)自動(dòng)化設(shè)備需要滿(mǎn)足側(cè)向水平步進(jìn)功能。同時(shí)考慮到射線(xiàn)機(jī)的自重與透照角度和高度,需要具備穩(wěn)固和跨距幅度的升降步進(jìn)功能,滿(mǎn)足一定池壁高度位置的橫縫射線(xiàn)檢驗(yàn)需求(見(jiàn)圖5)。
3.3 適用于池壁(立縫位置)可視自動(dòng)化射線(xiàn)檢驗(yàn)設(shè)備
針對(duì)池壁墻面部位的立向焊縫進(jìn)行連續(xù)自動(dòng)X射線(xiàn)檢測(cè)時(shí),通過(guò)在AGV機(jī)器人基座基礎(chǔ)上安裝一套豎直方向、可快速插接的剛性軌道,可遠(yuǎn)程操控升降機(jī)器人攜帶X射線(xiàn)機(jī)進(jìn)行上下升降,從而實(shí)現(xiàn)立項(xiàng)焊縫部位的連續(xù)拍片(見(jiàn)圖6)。
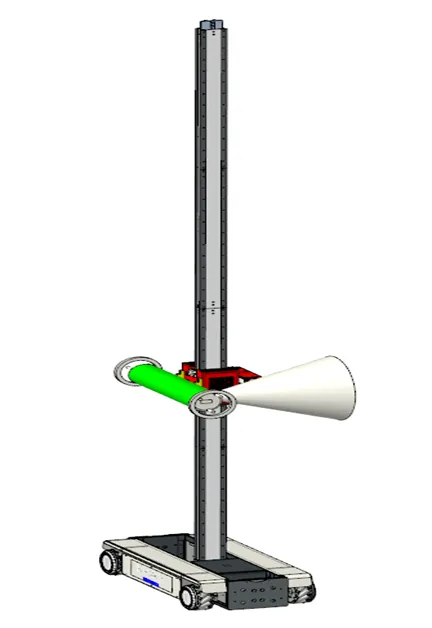
圖6 池壁立向焊縫自動(dòng)化射線(xiàn)檢驗(yàn)
(1)池壁墻面立向焊縫檢測(cè)導(dǎo)軌組合方式自動(dòng)化設(shè)備配置 2 000 mm/1 000 mm/500 mm/ 300 mm/200 mm 多規(guī)格長(zhǎng)度的鋼性軌道,根據(jù)實(shí)際墻面焊縫高度,通過(guò)便捷的插接方式,進(jìn)行任意組合AGV檢測(cè)機(jī)器人軌道長(zhǎng)度,高度可達(dá)3~6 m,符合大多不銹鋼覆面水池墻面焊縫射線(xiàn)檢驗(yàn)高度的應(yīng)用需求。
(2) AGV機(jī)器人軌道對(duì)接方法
先將安裝有升降系統(tǒng)的一段2 000 mm基座軌道,底部安裝在AGV機(jī)器人中心安裝基座上垂直鎖緊。軌道一頭安裝有插內(nèi)襯,依次將每段軌道插入另一根軌道內(nèi)部,貼實(shí)按緊后,通過(guò)螺釘卡扣鎖緊。
X射線(xiàn)機(jī)采用CP160型X射線(xiàn)探傷機(jī),該機(jī)型的特點(diǎn)是體積小、重量輕,尤其是可連續(xù)進(jìn)行X射線(xiàn)曝光透照功能,作業(yè)期間無(wú)需休息,有利于射線(xiàn)檢驗(yàn)功效的提升。X射線(xiàn)機(jī)步進(jìn)軌道是根據(jù)所需檢測(cè)立向焊縫高度、選擇相應(yīng)長(zhǎng)度的軌道、依次對(duì)接、插接后鎖緊螺釘即可。機(jī)身通過(guò)固定在高度升降機(jī)器人鎖死裝置上,可沿著立向軌道保持機(jī)身,形成穩(wěn)固定向的上升和下降。輕便機(jī)型的應(yīng)用,也是確保AGV檢測(cè)機(jī)器人行走過(guò)程中無(wú)晃動(dòng)影響的有效保障。
X射線(xiàn)機(jī)及升降機(jī)器人上安裝2個(gè)攝像頭、十字激光對(duì)準(zhǔn)儀。通過(guò)便攜式遠(yuǎn)程遙控器系統(tǒng)進(jìn)行控制,實(shí)現(xiàn)射線(xiàn)檢驗(yàn)作業(yè)遠(yuǎn)距離操控和觀察。該項(xiàng)創(chuàng)新功能,尤其適合應(yīng)用于存在高輻射劑量的作業(yè)環(huán)境。
4 依據(jù)不同功能水池結(jié)構(gòu)特點(diǎn)實(shí)施AGV機(jī)器人設(shè)計(jì)應(yīng)用分析
4.1 內(nèi)置換料水箱功能及結(jié)構(gòu)特點(diǎn)
“華龍一號(hào)”堆型不銹鋼覆面內(nèi)置換料水箱位于核島內(nèi)部(見(jiàn)圖7、圖8)。設(shè)計(jì)標(biāo)高-6.646 m~-3.830 m,位于內(nèi)部結(jié)構(gòu)廠(chǎng)房基礎(chǔ)底板之上。水箱由4個(gè)房間組成,1個(gè)多邊形環(huán)狀房間連接3個(gè)多邊形扇狀隔間,以專(zhuān)用型鋼作為焊接墊板對(duì)接拼裝而成。內(nèi)置換料水箱覆面需進(jìn)行射線(xiàn)檢測(cè)的焊縫約2 800 m,采用手工鎢極氬弧焊和熱絲TIG自動(dòng)焊焊接方法進(jìn)行焊接,水箱總重量約為200 t。
內(nèi)置換料水箱作為核島內(nèi)部最低位置的功能水箱,在核島正常運(yùn)行期間起到容納收集反應(yīng)堆堆芯水池的換料水,在突發(fā)重大事故期間,對(duì)匯集的水進(jìn)行收集,并由水箱內(nèi)的設(shè)備過(guò)濾后再供給安注箱對(duì)堆芯進(jìn)行冷卻,保證堆芯安全。
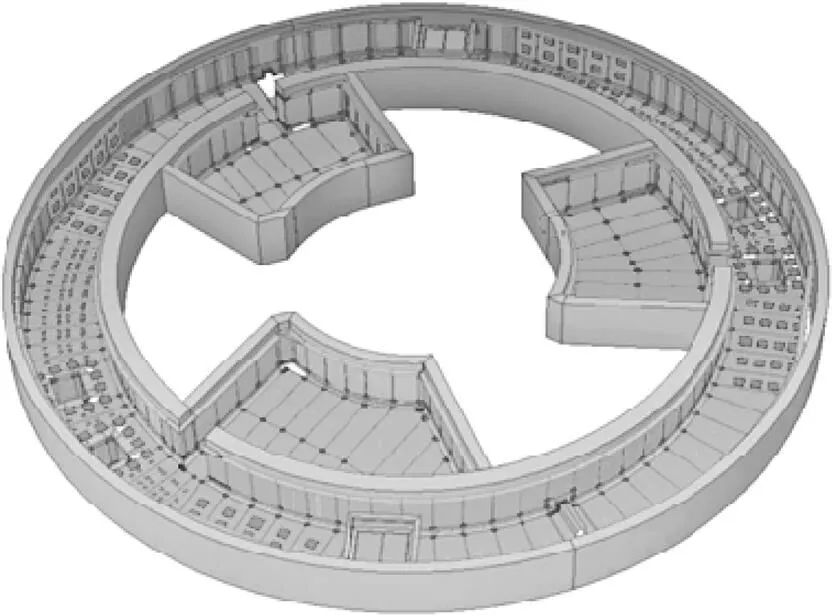
圖7 內(nèi)置換料水箱三維模型圖

圖8 內(nèi)置換料水箱先貼法工程實(shí)體圖
內(nèi)置換料水箱是依據(jù)核島內(nèi)部結(jié)構(gòu)圓周形式分布的,房間高度為2.816 m,焊縫分布較為規(guī)整,池壁、頂部和地面均為滿(mǎn)鋪不銹鋼。需要進(jìn)行100%射線(xiàn)檢驗(yàn)的焊縫,大多為池壁豎向(立縫)及底板(平縫)焊縫。就其焊縫形式及房間高度而言,最為適合射線(xiàn)檢驗(yàn)自動(dòng)化工藝技術(shù)的實(shí)際應(yīng)用。該部位池壁焊縫部位高度適中,房間焊縫排布規(guī)整,可以利用AGV機(jī)器人基座在地面行進(jìn),配套剛性豎向軌道,將射線(xiàn)探傷機(jī)進(jìn)行連接固定。
對(duì)于立向焊縫,可采用基座就位后鎖死固定功能,在拍片過(guò)程中僅操控射線(xiàn)機(jī)的升降,利用紅外線(xiàn)十字對(duì)中可視功能,觀察射線(xiàn)機(jī)透照窗口對(duì)中的準(zhǔn)確性(見(jiàn)圖9)。
對(duì)于橫向焊縫,可采取將射線(xiàn)機(jī)在立向軌道上的鎖死固定功能,在拍片過(guò)程中僅操控AGV機(jī)器人基座的側(cè)向平移,利用紅外線(xiàn)十字對(duì)中可視功能,觀察射線(xiàn)機(jī)透照窗口對(duì)中的準(zhǔn)確性(見(jiàn)圖10)。

圖9 池壁立向焊縫AGV機(jī)器人自動(dòng)射線(xiàn)檢驗(yàn)步進(jìn)形式連圖

圖10 池壁端部橫向焊縫AGV機(jī)器人自動(dòng)射線(xiàn)檢驗(yàn)步進(jìn)形式連圖
4.2 非能動(dòng)堆腔注水箱功能及結(jié)構(gòu)特點(diǎn)
非能動(dòng)堆腔注水箱位于核島內(nèi)部結(jié)構(gòu)+1~+23.02 m,水箱高度約22.02 m,位于反應(yīng)堆堆芯旁邊。水箱結(jié)構(gòu)整體為扇形結(jié)構(gòu),由1面弧形墻和3面直墻組成(見(jiàn)圖11)。
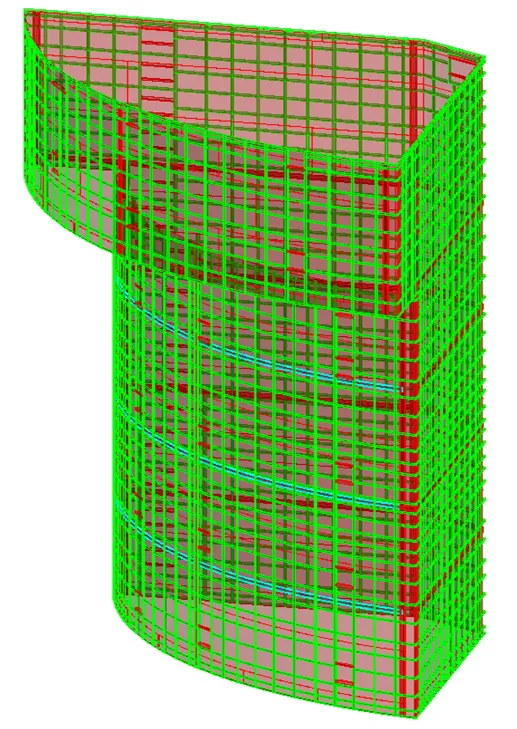
圖11 非能動(dòng)堆腔注水箱三維模型圖
非能動(dòng)堆腔注水箱為“華龍一號(hào)”機(jī)組“非能動(dòng)”系統(tǒng)的重要組成部分,在運(yùn)行期間發(fā)生重大事故時(shí),在不需要提供人為動(dòng)力的情況下,為堆芯提供冷卻水的安全水箱功能。
非能動(dòng)堆腔注水箱是“華龍一號(hào)”堆型核電廠(chǎng),不銹鋼覆面水池凈深最高的一個(gè)房間,其深度達(dá)到22.02 m。AGV機(jī)器人自動(dòng)化射線(xiàn)檢驗(yàn)設(shè)備在這個(gè)作業(yè)環(huán)境中,豎向剛性軌道的連接高度與基座配套連接的方式,難以形成有效應(yīng)用。因此,需要在此基礎(chǔ)上進(jìn)行適當(dāng)?shù)膬?yōu)化與改進(jìn)(見(jiàn)圖12)。
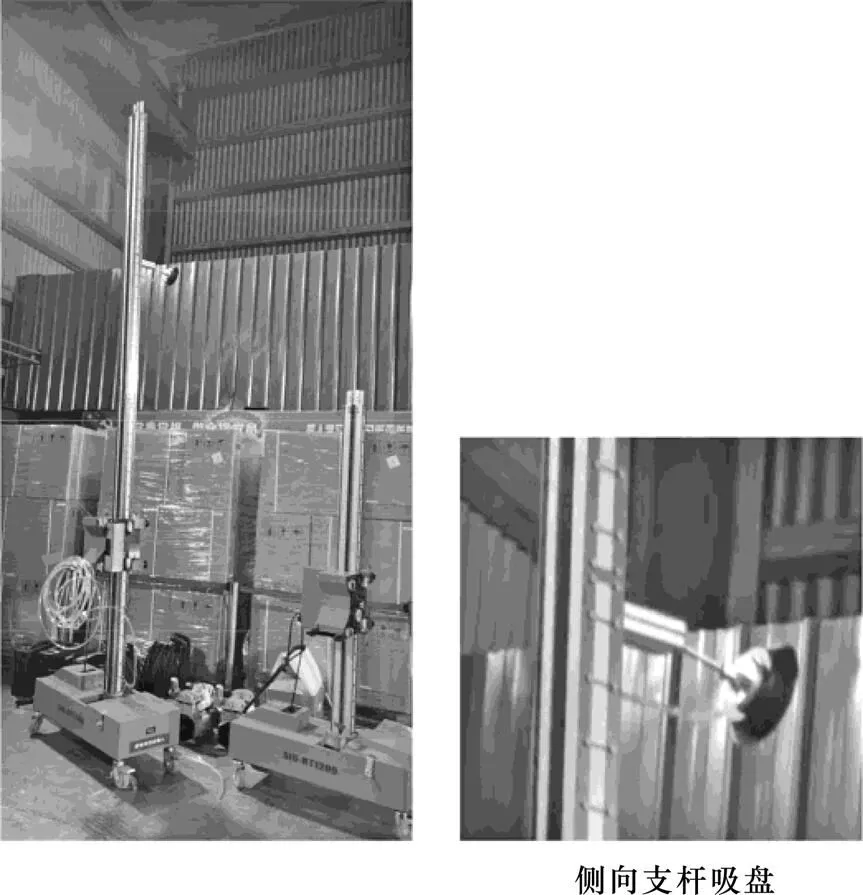
圖12 AGV機(jī)器人
首先,將AGV機(jī)器人基座去掉麥克納姆輪裝置,縮小基座體積、增加基座重量確保其穩(wěn)固性能,采用萬(wàn)向輪及輪轂鎖死裝置,便于快速將AGV機(jī)器人基座,推拉至需要進(jìn)行射線(xiàn)檢驗(yàn)的池壁立縫部位,基座就位后逐節(jié)安裝剛性軌道至焊縫頂部高度。
其次,針對(duì)凈深較大池壁焊縫進(jìn)行專(zhuān)項(xiàng)優(yōu)化改進(jìn),采用分段側(cè)向支桿吸盤(pán)固定工藝,使AGV機(jī)器人基座、剛性軌道與不銹鋼覆面實(shí)現(xiàn)緊密、牢固的支撐和吸附連接,確保射線(xiàn)探傷機(jī)安裝至剛性軌道上自動(dòng)拍片升降過(guò)程中的穩(wěn)固性。同理運(yùn)用紅外線(xiàn)十字對(duì)中裝置,遠(yuǎn)程操控觀察射線(xiàn)機(jī)曝光窗口,聚焦焊縫位置的準(zhǔn)確對(duì)中。
用于非能動(dòng)堆腔注水箱,可視自動(dòng)化AGV機(jī)器人射線(xiàn)檢驗(yàn)工藝,在核電廠(chǎng)不銹鋼覆面水池實(shí)體射線(xiàn)探傷應(yīng)用(見(jiàn)圖13)。

圖13 軌道吸盤(pán)安裝射線(xiàn)機(jī)穩(wěn)固裝置
4.3 燃料乏池功能及結(jié)構(gòu)特點(diǎn)
乏燃料水池位于燃料廠(chǎng)房+3.744~+16.55 m,水池整體深度約12.806 m,水池通過(guò)水閘門(mén)與燃料轉(zhuǎn)運(yùn)艙相通,燃料轉(zhuǎn)運(yùn)艙通過(guò)轉(zhuǎn)運(yùn)通道與容納堆芯的堆腔水池相通。水池結(jié)構(gòu)比較規(guī)整,由4面直墻組成(見(jiàn)圖14)。
乏燃料水池主要貯存核島運(yùn)行期間所需的裂變?nèi)剂习粢约胺磻?yīng)完成的乏燃料棒。水池內(nèi)貯存冷卻水,保證燃料存放期間的溫度處于安全范圍內(nèi)。
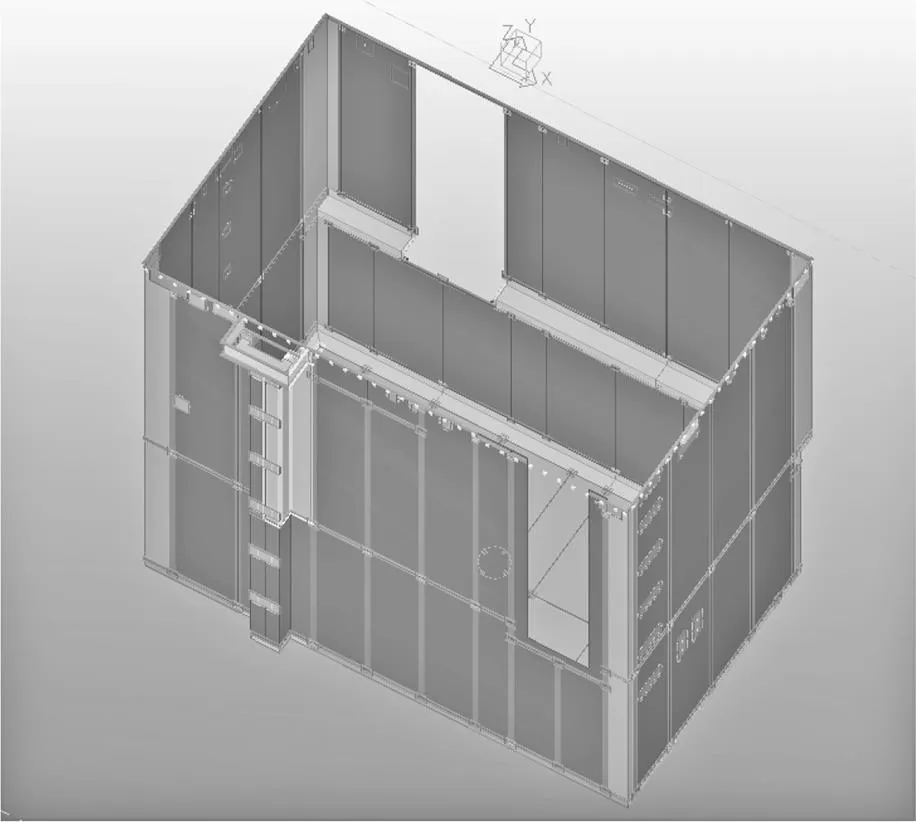
圖14 乏燃料水池三維模型圖
4.4 輔助給水箱功能及結(jié)構(gòu)特點(diǎn)
輔助給水箱位于核島電氣廠(chǎng)房-7.696~-0.55 m,由兩個(gè)規(guī)整的長(zhǎng)方體房間組成,水箱整體高度約7.146 m,水箱為全密閉結(jié)構(gòu),每個(gè)水箱有兩個(gè)供人員出入的人孔(見(jiàn)圖15)。
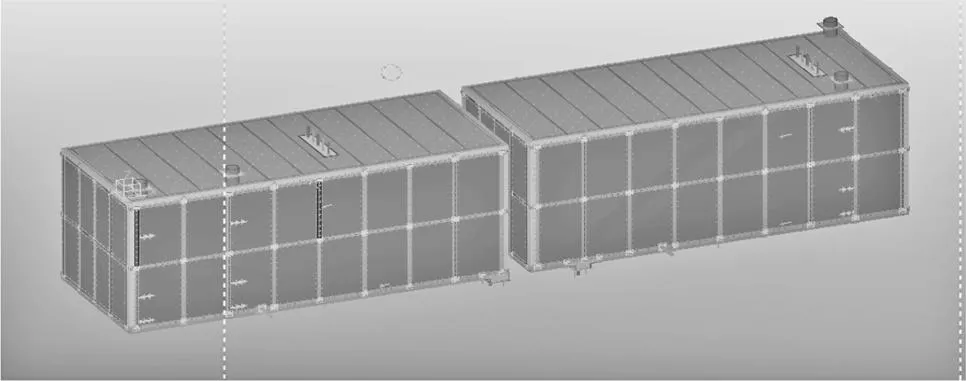
圖15 輔助給水箱三維模型圖
輔助給水箱為核島電氣設(shè)備冷卻水儲(chǔ)存水箱,為核島安全運(yùn)行設(shè)備提供循環(huán)冷卻水。
4.5 非能動(dòng)熱量導(dǎo)出水池功能及結(jié)構(gòu)特點(diǎn)
非能動(dòng)熱量導(dǎo)出水池位于核島外殼+50.6~+55.6 m,由三個(gè)相連的環(huán)形房間組成,每個(gè)房間內(nèi)有一個(gè)標(biāo)高+42.3~+50.6 m的地坑(見(jiàn)圖16)。
非能動(dòng)熱量導(dǎo)出水池作為“華龍一號(hào)非能動(dòng)”系統(tǒng)的組成部分,在核島運(yùn)行期間發(fā)生重大事故時(shí),在不需要提供人為動(dòng)力的情況下,將核島內(nèi)部的熱量導(dǎo)出冷卻,并對(duì)安全殼進(jìn)行噴淋冷卻,保證核島主體安全,為人為介入爭(zhēng)取時(shí)間。
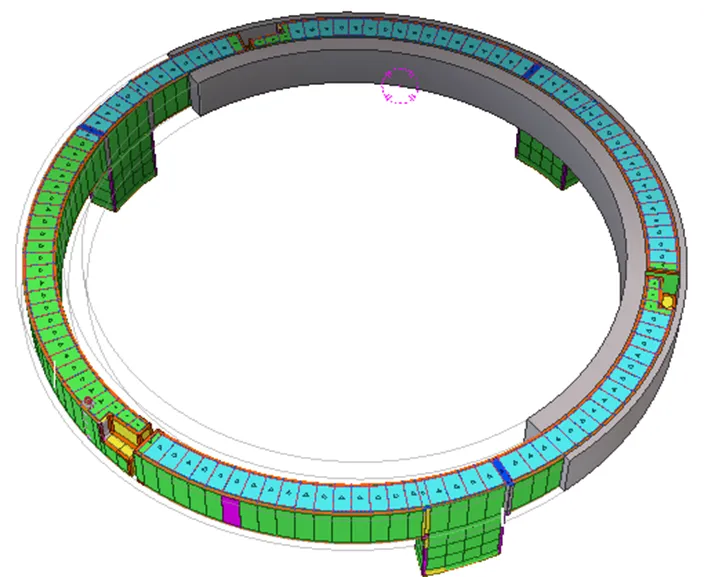
圖16 非能動(dòng)熱量導(dǎo)出水池三維模型圖
4.6 燃料乏池、輔助給水箱、非能動(dòng)熱量導(dǎo)出水池可視自動(dòng)化AGV機(jī)器人射線(xiàn)檢驗(yàn)應(yīng)用
燃料乏池、輔助給水箱、非能動(dòng)熱量導(dǎo)出水池,三個(gè)不同功能的不銹鋼覆面水池設(shè)計(jì)結(jié)構(gòu)凈深,均遠(yuǎn)遠(yuǎn)小于非能動(dòng)堆腔注水箱的凈深高度,該類(lèi)不銹鋼覆面水池焊縫的射線(xiàn)檢驗(yàn),可參照內(nèi)置換料水箱可視自動(dòng)化AGV機(jī)器人射線(xiàn)檢驗(yàn)工藝實(shí)施。
對(duì)于地面焊縫,采用麥克納姆輪AGV機(jī)器人,利用紅外線(xiàn)十字對(duì)中裝置,將射線(xiàn)機(jī)安裝在穩(wěn)固架上,曝光窗口朝向地面,使用遙控監(jiān)視面板,遠(yuǎn)程操控麥克納姆輪AGV機(jī)器人在地面焊縫區(qū)域的行進(jìn),以及曝光點(diǎn)的準(zhǔn)確對(duì)中(見(jiàn)圖17)。
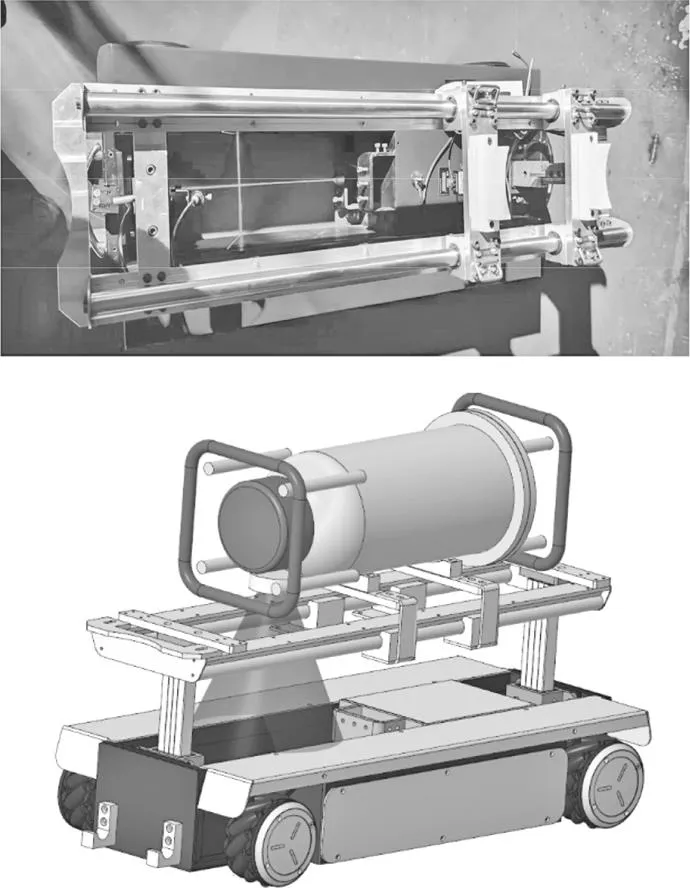
圖17 AGV機(jī)器人地面焊縫自動(dòng)化射線(xiàn)檢驗(yàn)
對(duì)于池壁焊縫,采用麥克納姆輪AGV機(jī)器人結(jié)合剛性軌道的豎向連接,實(shí)現(xiàn)池壁立向、橫向焊縫的可視自動(dòng)化射線(xiàn)檢驗(yàn)。
5 麥克納姆輪AGV機(jī)器人可視自動(dòng)化射線(xiàn)檢驗(yàn)技術(shù)創(chuàng)新點(diǎn)
5.1 麥克納姆輪AGV機(jī)器人組成及應(yīng)用原理
本項(xiàng)技術(shù)研究涉及《一種用于核電廠(chǎng)“麥輪”AGV機(jī)器人可視自動(dòng)化射線(xiàn)檢驗(yàn)遙控設(shè)備》應(yīng)用技術(shù),具備行業(yè)技術(shù)的創(chuàng)新先進(jìn)性。麥克納姆輪AGV機(jī)器人自動(dòng)化射線(xiàn)檢驗(yàn)設(shè)備主要由:AGV機(jī)器人、X射線(xiàn)機(jī)、多功能地面檢測(cè)裝置、池壁墻面自動(dòng)檢測(cè)組合套裝設(shè)備等組件組成。
麥克納姆輪簡(jiǎn)稱(chēng)“麥輪”,是一種可以進(jìn)行全方位任意移動(dòng)的輪子,由輪轂和圍繞輪轂的輥?zhàn)咏M合而成。麥克納姆輪的輥?zhàn)虞S線(xiàn)與輪轂軸線(xiàn)成45°夾角,在輪轂的輪緣上斜向分布著許多小輪子(即“輥?zhàn)印保率馆喿涌梢詸M向滑移。輥?zhàn)佑质且环N沒(méi)有動(dòng)力的小滾子,其母線(xiàn)十分特殊,當(dāng)輪子繞著固定的輪芯軸轉(zhuǎn)動(dòng)時(shí),各個(gè)小滾子的包絡(luò)線(xiàn)會(huì)形成圓柱面,可以驅(qū)動(dòng)輪子實(shí)現(xiàn)連續(xù)地向前滾動(dòng)。AGV機(jī)器人由這種輪轂加以組合,便可實(shí)現(xiàn)自動(dòng)化射線(xiàn)檢驗(yàn)設(shè)備基座,在狹窄空間、任意方向的連續(xù)移動(dòng)功能。
5.2 “麥輪”AGV機(jī)器人操控設(shè)計(jì)要點(diǎn)
5.2.1X射線(xiàn)機(jī)安裝聯(lián)機(jī)方式
X射線(xiàn)機(jī)的固定:采用射線(xiàn)機(jī)穩(wěn)固專(zhuān)用捆綁帶進(jìn)行固定和鎖緊;
X射線(xiàn)機(jī)的安裝:依據(jù)射線(xiàn)檢驗(yàn)透照工藝要求,機(jī)頭窗口至不銹鋼焊縫表面需要確保具有600~700 mm的透照焦距。并重點(diǎn)注意射線(xiàn)機(jī)端部散熱口,以及射線(xiàn)機(jī)窗口輻射透照范圍內(nèi)應(yīng)無(wú)任何阻擋物;
5.2.2紅外線(xiàn)十字對(duì)中精準(zhǔn)調(diào)節(jié)要求
X射線(xiàn)機(jī)就位于AGV機(jī)器人基座剛性軌道上的設(shè)備穩(wěn)固架后,先調(diào)整紅外線(xiàn)十字激光中心位置與X射線(xiàn)機(jī)靶心重合,再調(diào)節(jié)射線(xiàn)檢驗(yàn)所需透照焦距,最后通過(guò)便捷式遠(yuǎn)程遙控器,觀察紅外線(xiàn)十字準(zhǔn)星與焊縫相應(yīng)位置的對(duì)準(zhǔn)情況。開(kāi)始自動(dòng)行進(jìn)射線(xiàn)檢驗(yàn)過(guò)程中,也可進(jìn)行準(zhǔn)心位置的微調(diào)操作與實(shí)時(shí)影像監(jiān)控。
便捷式遙控器與發(fā)射器、天線(xiàn),通過(guò)50 M數(shù)據(jù)線(xiàn)進(jìn)行連接,遠(yuǎn)程監(jiān)控十字激光對(duì)準(zhǔn)器中心位置與焊縫表面十字標(biāo)識(shí)位置重合精準(zhǔn)性,通過(guò)監(jiān)控視頻清晰可見(jiàn)焊縫附近的搭接標(biāo)記、像質(zhì)計(jì)、鉛字等標(biāo)識(shí)(見(jiàn)圖18)。
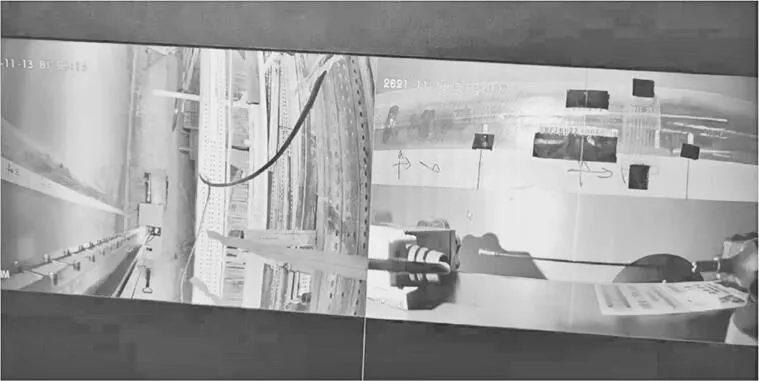
圖18 實(shí)時(shí)視頻監(jiān)控
5.3 麥克納姆輪AGV機(jī)器人技術(shù)性能創(chuàng)新
結(jié)合“麥輪”AGV機(jī)器人獨(dú)有的連續(xù)行進(jìn)移動(dòng)及橫向滑移的靈活性,在核電廠(chǎng)不銹鋼覆面水池結(jié)構(gòu)空間的適用性強(qiáng),地面覆蓋可達(dá)性非常高,并且可實(shí)現(xiàn)全方位、狹窄空間直線(xiàn)行進(jìn)和橫向滑移,具有高效可操作及應(yīng)用性能。
AGV機(jī)器人通過(guò)鋰電池進(jìn)行供電,設(shè)有AC-220 V充電口,充電通過(guò)專(zhuān)用鋰電池充電器進(jìn)行充電,配有按鈕開(kāi)關(guān),充電時(shí)間約為4 h。鋰電池充滿(mǎn)電啟動(dòng)后,可連續(xù)工作10 h以上,有效滿(mǎn)足核電廠(chǎng)射線(xiàn)探傷作業(yè),輻射安全監(jiān)管對(duì)當(dāng)日施工現(xiàn)場(chǎng)夜間射線(xiàn)探傷,批復(fù)22:30—次日凌晨6:00探傷許可證的作業(yè)窗口時(shí)間。
專(zhuān)用便捷式遠(yuǎn)程控制器,設(shè)置在線(xiàn)圖傳操作顯示器、遙控器按鈕、數(shù)據(jù)信號(hào)傳輸接口、電源開(kāi)關(guān)、電量顯示、充電口等設(shè)備組件。可與“麥輪”AGV機(jī)器人通過(guò)無(wú)線(xiàn)信號(hào)控制鏈進(jìn)行數(shù)據(jù)傳輸,實(shí)現(xiàn)遠(yuǎn)程可視化操控AGV機(jī)器人行走和遠(yuǎn)程實(shí)時(shí)圖像傳送與監(jiān)控功能(見(jiàn)圖19)。
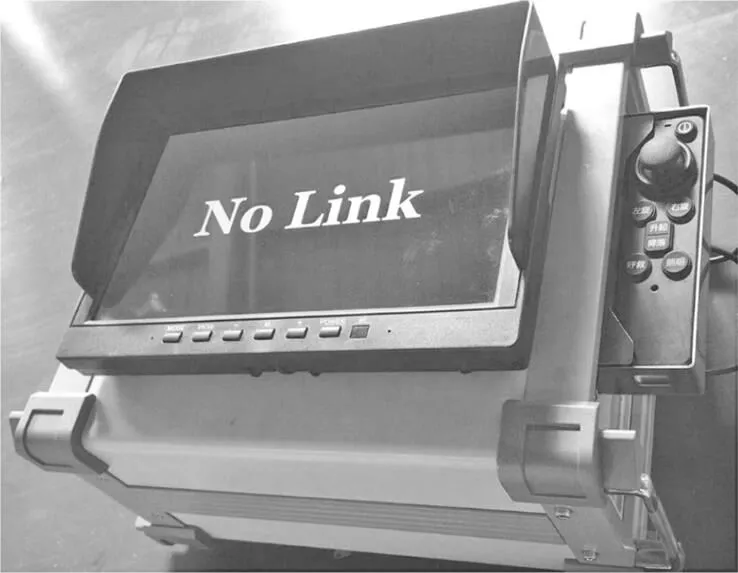
圖19 便捷式遠(yuǎn)程遙控器
便攜遙控器具備無(wú)線(xiàn)、無(wú)線(xiàn)中轉(zhuǎn)信號(hào)、有線(xiàn)三種轉(zhuǎn)換形式的中轉(zhuǎn)方式進(jìn)行信號(hào)傳輸,AGV本身具有無(wú)線(xiàn)接收功能。為了優(yōu)化本設(shè)備可視影像信息準(zhǔn)確、不失真的實(shí)時(shí)傳輸與遠(yuǎn)程監(jiān)控功能,可對(duì)X射線(xiàn)的頻段、對(duì)講機(jī)頻率、AGV機(jī)器人遙控信號(hào)燈頻段等,可能會(huì)影響傳輸信號(hào)的干擾源進(jìn)行有效屏蔽。“麥輪”AGV機(jī)器人,經(jīng)核島現(xiàn)場(chǎng)實(shí)地遠(yuǎn)程遙控測(cè)試,可滿(mǎn)足在相對(duì)密閉的空間(如核島內(nèi)部結(jié)構(gòu)房間A室到B室間距50 m范圍,測(cè)試介質(zhì)為混凝土阻隔墻體),無(wú)任何電信號(hào)的惡劣信號(hào)屏蔽環(huán)境工況場(chǎng)所的有效應(yīng)用。
“麥輪”AGV機(jī)器人可視自動(dòng)化射線(xiàn)檢驗(yàn)設(shè)備技術(shù)應(yīng)用,在核電廠(chǎng)建設(shè)無(wú)損檢測(cè)領(lǐng)域,就自動(dòng)化的射線(xiàn)檢驗(yàn)工藝技術(shù),進(jìn)行了有效的創(chuàng)新研發(fā)和可行性試驗(yàn)論證。實(shí)現(xiàn)了“華龍一號(hào)”堆型核電廠(chǎng),核島不銹鋼覆面施工設(shè)計(jì)中,形成針對(duì)大批量焊縫射線(xiàn)檢測(cè)作業(yè)的“便攜遠(yuǎn)程遙控操作”和“可視化的實(shí)時(shí)監(jiān)控與自動(dòng)化射線(xiàn)檢驗(yàn)”兩項(xiàng)射線(xiàn)檢驗(yàn)技術(shù)領(lǐng)域的重大創(chuàng)新。
(1)X射線(xiàn)檢驗(yàn)便攜遠(yuǎn)程遙控操作的工藝創(chuàng)新模式,尤其適合于不銹鋼水池凈身高度較大的底板焊縫100%射線(xiàn)檢驗(yàn)部位,以及作業(yè)環(huán)境存在較高輻射劑量率的環(huán)境場(chǎng)所。對(duì)透照焊縫一次布片、標(biāo)識(shí)排布完成后,人員均可撤離至安全防護(hù)區(qū)域?qū)嵤┻h(yuǎn)程可視化的遙控操作,即可降低射線(xiàn)檢驗(yàn)人員頻繁行走及搬運(yùn)設(shè)備的勞累強(qiáng)度,自動(dòng)化的遙控操作也能大幅減少作業(yè)班組人員配置,實(shí)現(xiàn)降本增效,并可最優(yōu)化地避免作業(yè)人員超輻射劑量或誤照射風(fēng)險(xiǎn)。
(2)可視化的實(shí)時(shí)監(jiān)控與自動(dòng)化射線(xiàn)檢驗(yàn)工藝技術(shù)的有機(jī)結(jié)合,實(shí)現(xiàn)了核電廠(chǎng)土建施工過(guò)程中無(wú)損檢測(cè)自動(dòng)化技術(shù)的創(chuàng)新應(yīng)用。“麥輪”AGV機(jī)器人可視自動(dòng)化射線(xiàn)檢驗(yàn)設(shè)備技術(shù),具備如下設(shè)備技術(shù)功能創(chuàng)新:
1)AGV機(jī)身配備3~4個(gè)全景攝像頭,實(shí)現(xiàn)對(duì)焊縫、AGV機(jī)器人行走姿態(tài)、地面工況、室內(nèi)工況等作業(yè)環(huán)境條件,進(jìn)行實(shí)時(shí)有效的監(jiān)控。無(wú)線(xiàn)攝像頭體積小、高清、并具有夜視功能,高清1 080 P大于200 W像素。考慮攝像頭、接收器、遙控器各個(gè)信號(hào)的頻段、距離、功率、增益等因素,采取相應(yīng)屏蔽措施防止信號(hào)傳輸干擾;
2)在線(xiàn)圖傳顯示時(shí),可進(jìn)行任意調(diào)用單個(gè)畫(huà)面進(jìn)行局部放大監(jiān)控,在線(xiàn)圖傳監(jiān)控畫(huà)面延時(shí)低于180 ms;
3)遠(yuǎn)程圖傳監(jiān)控時(shí),對(duì)焊縫及熱影響區(qū)邊緣擺放的5~10 mm字高鉛字、像質(zhì)計(jì)等標(biāo)識(shí)信息,均可進(jìn)行清晰識(shí)別,并能顯示X射線(xiàn)機(jī)透照窗口至焊縫表面的距離。正常X射線(xiàn)機(jī)距離焊縫[(600~700)±50]mm,通過(guò)視頻監(jiān)控能有效掌握和控制拍片所需的透照焦距要求,確保射線(xiàn)底片一次有效透照長(zhǎng)度的符合性;
4)遠(yuǎn)程在線(xiàn)圖傳遙控器設(shè)計(jì)成手提式、開(kāi)合式兩種方式,利于方便攜帶和操作便捷。具備可保存50 G自動(dòng)化射線(xiàn)檢驗(yàn)監(jiān)控過(guò)程視頻影像資料信息的存儲(chǔ)功能,通過(guò)USB接口讀取和保存。所有通信接口及線(xiàn)路均為模塊化,利于各模塊的連接插拔,便于探傷作業(yè)時(shí)可靠地安裝與拆卸。
X射線(xiàn)機(jī)與AGV機(jī)器人基座的剛性軌道連接完畢后,其射線(xiàn)機(jī)于軌道上下步進(jìn)高度的升降方式,采用自動(dòng)光電限位控制技術(shù),即依據(jù)所需射線(xiàn)底片的有效片長(zhǎng),為射線(xiàn)機(jī)窗口紅外線(xiàn)十字準(zhǔn)星的自動(dòng)升降透照步進(jìn)距離。射線(xiàn)機(jī)高度升降為無(wú)線(xiàn)操控方式,升降電機(jī)通過(guò)無(wú)線(xiàn)信號(hào)控制,自身單獨(dú)配備鋰電池,僅供射線(xiàn)機(jī)高度升降功能。X射線(xiàn)機(jī)電源、高壓控制器的連接電纜,通過(guò)自動(dòng)卷線(xiàn)盤(pán)(集電環(huán))的方式伸展或收攏。省去了高度升降電纜線(xiàn),在射線(xiàn)機(jī)升降過(guò)程中的連線(xiàn)回收與電纜線(xiàn)回收的相互干擾與阻礙的難題。
“麥輪”AGV機(jī)器人可視自動(dòng)化射線(xiàn)檢驗(yàn)設(shè)備技術(shù)成果已形成“華龍一號(hào)”核電廠(chǎng)堆型,不銹鋼覆面水池射線(xiàn)檢驗(yàn)工藝技術(shù)創(chuàng)新,從功效、安全、自動(dòng)化檢測(cè)技術(shù)應(yīng)用等方面,均大幅優(yōu)化改進(jìn)了常規(guī)射線(xiàn)檢驗(yàn)方法的局限和不足,達(dá)到了國(guó)內(nèi)無(wú)損檢測(cè)行業(yè)技術(shù)領(lǐng)先水平。
6 研究成果對(duì)自動(dòng)化射線(xiàn)檢驗(yàn)技術(shù)創(chuàng)新發(fā)展的應(yīng)用前景
核電是電力系統(tǒng)中最穩(wěn)定的基礎(chǔ)能源支撐之一,核電在我國(guó)新時(shí)代能源體系建設(shè)中不可或缺。核電是唯一能夠大規(guī)模替代化石能源的基荷電源,核電全壽命周期具有較好的成本競(jìng)爭(zhēng)力,利用核電替代傳統(tǒng)化石能源有利于降低電力系統(tǒng)成本,國(guó)家對(duì)于低碳排放及推廣清潔能源的要求,成為了核電行業(yè)持續(xù)發(fā)展的重要推力。
“十四五”規(guī)劃和2035年遠(yuǎn)景目標(biāo)綱要提出,“推進(jìn)能源革命,建設(shè)清潔低碳、安全高效的能源體系、安全穩(wěn)妥推動(dòng)沿海核電建設(shè)”。可以預(yù)見(jiàn),我國(guó)核電行業(yè)將迎來(lái)重大發(fā)展機(jī)遇,為實(shí)現(xiàn)碳達(dá)峰、碳中和目標(biāo)發(fā)揮積極作用。與此同時(shí),核電發(fā)展本身的規(guī)律和未來(lái)趨勢(shì)也越發(fā)明顯。
目前國(guó)內(nèi)核電廠(chǎng)建設(shè)主要為“華龍一號(hào)”堆型,是具有完全自主知識(shí)產(chǎn)權(quán)的三代核電廠(chǎng)建設(shè)堆型。中核集團(tuán)“華龍一號(hào)”總設(shè)計(jì)師邢繼總曾說(shuō)過(guò)“實(shí)現(xiàn)百萬(wàn)千瓦級(jí)大型先進(jìn)壓水堆自主化一直是我國(guó)核工業(yè)人追求的目標(biāo),“華龍一號(hào)”是三代核電人共同的心血,很幸運(yùn)到我們這一代的時(shí)候把它變成了現(xiàn)實(shí)”。同時(shí)提出“能動(dòng)與非能動(dòng)相結(jié)合”為核心的先進(jìn)核安全設(shè)計(jì)理論,推動(dòng)并參與制定了“數(shù)字核電”發(fā)展規(guī)劃,依托“華龍一號(hào)”示范工程開(kāi)發(fā)的“數(shù)字核電廠(chǎng)”也已具雛形,建立了數(shù)字電站交付的首個(gè)企業(yè)標(biāo)準(zhǔn),實(shí)現(xiàn)數(shù)字華龍與實(shí)體華龍的同步交付。結(jié)合行業(yè)大力推廣的自動(dòng)化焊接工藝技術(shù)在核電廠(chǎng)工程實(shí)體的應(yīng)用成效,更對(duì)無(wú)損檢測(cè)專(zhuān)業(yè)技術(shù)向自動(dòng)化檢驗(yàn)技術(shù)設(shè)備的研發(fā)與應(yīng)用,形成了迫切的跟進(jìn)需求。
由此,“麥輪”AGV機(jī)器人可視自動(dòng)化射線(xiàn)檢驗(yàn)設(shè)備,結(jié)合自動(dòng)化焊接質(zhì)量和功效的提升基礎(chǔ)上,具備良好的行業(yè)需求前景。該自動(dòng)化射線(xiàn)檢驗(yàn)創(chuàng)新設(shè)備,已在福清、漳州核電廠(chǎng)及霞浦某核工程項(xiàng)目得到了良好、有效的應(yīng)用。從射線(xiàn)檢驗(yàn)實(shí)際功效、減少班組作業(yè)人員配置、降低勞動(dòng)強(qiáng)度、確保輻射安全等方面,均得到大幅提升和優(yōu)化,實(shí)現(xiàn)了國(guó)內(nèi)行業(yè)技術(shù)創(chuàng)新引領(lǐng)。
7 結(jié)論
(1)本項(xiàng)用于核電廠(chǎng)《“華龍一號(hào)”不銹鋼覆面焊縫可視自動(dòng)化AGV機(jī)器人射線(xiàn)檢驗(yàn)技術(shù)研究與應(yīng)用》專(zhuān)業(yè)技術(shù)研究成果,有效解決、攻克、創(chuàng)新了核電廠(chǎng)土建施工中射線(xiàn)檢驗(yàn)工藝設(shè)備的常規(guī)應(yīng)用方式。
(2)通過(guò)對(duì)不同檢測(cè)工況環(huán)境采取自動(dòng)化行進(jìn)和運(yùn)行的遠(yuǎn)程操控、實(shí)現(xiàn)了“麥輪”AGV機(jī)器人操作過(guò)程中的靈活升降、調(diào)位及轉(zhuǎn)向功能,有效減少自動(dòng)化設(shè)備檢測(cè)盲區(qū)。
(3)尤其是創(chuàng)新研制應(yīng)用的射線(xiàn)機(jī)曝光窗口紅外線(xiàn)聚焦定位功能,可確保焊縫每張射線(xiàn)透照底片搭接和有效片長(zhǎng)的確定,該功能可實(shí)現(xiàn)遠(yuǎn)程視頻操控完成。
(4)該設(shè)備特別適合應(yīng)用于徑深高度大,以及存在輻射劑量的焊縫池壁作業(yè)環(huán)境,將設(shè)備就位及一次性布片后,即可實(shí)現(xiàn)遠(yuǎn)程操控自動(dòng)化射線(xiàn)檢驗(yàn)。
(5)創(chuàng)新自動(dòng)化研制設(shè)備,可在核電廠(chǎng)射線(xiàn)檢驗(yàn)專(zhuān)業(yè)技術(shù)領(lǐng)域中,進(jìn)行良好的推廣與應(yīng)用。
[1] 強(qiáng)天鵬. NDT全國(guó)特種設(shè)備無(wú)損檢測(cè)人員資格考核統(tǒng)編教材射線(xiàn)檢測(cè)[M]. 北京:中國(guó)勞動(dòng)社會(huì)保障出版社,2007.
[2] 法國(guó)核島設(shè)備設(shè)計(jì)和建造規(guī)則協(xié)會(huì). 壓水堆核島機(jī)械設(shè)備設(shè)計(jì)核建造規(guī)則:RCC-M 2000第Ⅲ卷MC篇[S]. 法國(guó),AFCEN,2010.
[3] 核工業(yè)標(biāo)準(zhǔn)化研究所. NB/T 20003.3—2021:核電廠(chǎng)核島機(jī)械設(shè)備無(wú)損檢測(cè):第3部分射線(xiàn)檢測(cè)[S]. 北京:中國(guó)原子能出版社,2021.
[4] 全國(guó)鍋爐壓力容器標(biāo)準(zhǔn)化技術(shù)委員會(huì). NB/T 47013.2—2015:承壓設(shè)備無(wú)損檢測(cè):第2部分射線(xiàn)檢測(cè)[S]. 北京:新華出版社,2015.
[5] 全國(guó)無(wú)損檢測(cè)標(biāo)準(zhǔn)化技術(shù)委員會(huì). JB/T 7902—2015:無(wú)損檢測(cè)線(xiàn)型像質(zhì)計(jì)通用規(guī)范[S]. 北京:機(jī)械工業(yè)出版社,2015.
Study and Application of Visual Automatic X-ray Inspection Technique for Weld Seams of “Hualong One” Stainless Steel Cladding Weld
HAN Jingtao
(China Nuclear Industry 24 Construction Co.,Ltd.CNEC-ARIT,Mianyang of Sichuan Prov.621000,China)
The X-ray inspection is widely used in the detection of thin plate welding construction parts such as nuclear island steel lining and stainless-steel cladding pool in nuclear power plant. Combing with the unfavorable factors of the weld seam inspection volume of the Hualong One type stainless steel cladding pool, tight construction period, few flaw detection operation windows, low efficiency of conventional radiographic inspection methods, high labor intensity, large number of operation teams, and the environmental characteristics of stainless steel construction, this paper carry out study on the visual automatic X-ray inspection technique, which effectively realizes the remote control of X-ray inspection operations, and reduces the radiation dose of personnel. These form a visual, automated, standardized, and efficient automatic X-ray inspection equipment, which expands the effective application of the automated innovative radiographic inspection process in the Hualong One project entity.
HPR One; X-ray inspection; Visual operation & control; Automation equipment; Technical application
TL48
A
0258-0918(2023)03-0620-10
2022-07-11
韓景濤(1971—),男,吉林長(zhǎng)春人,學(xué)士,研究員級(jí)高級(jí)工程師,現(xiàn)從事核行業(yè)無(wú)損檢驗(yàn)專(zhuān)業(yè)技術(shù)研究
猜你喜歡
設(shè)備管理與維修(2022年21期)2022-12-28 07:34:58
設(shè)備管理與維修(2022年21期)2022-12-28 07:33:36
中國(guó)特種設(shè)備安全(2022年1期)2022-04-26 14:15:58
建材發(fā)展導(dǎo)向(2021年6期)2021-06-09 05:57:08
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
山東冶金(2019年1期)2019-03-30 01:35:32
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2017年10期)2018-01-22 03:04:00
制造技術(shù)與機(jī)床(2017年8期)2017-11-27 02:10:21
中國(guó)核電(2017年1期)2017-05-17 06:10:11
制造業(yè)自動(dòng)化(2017年2期)2017-03-20 14:26:13