基于創新能力培養的機器人認知實踐教學體系研究與探索
2023-08-21 01:30:32崔蘭花鄭紅偉王偉畢海霞
創新創業理論研究與實踐 2023年14期
崔蘭花,鄭紅偉,王偉,畢海霞
(1.河北工業大學 圖書館,天津 300401;2.河北工業大學 實驗實訓中心,天津 300401;3.河北工業大學 大學生創新創業中心,天津 300401)
隨著機器人技術的日趨成熟,機器人開始被應用于眾多領域,如工業制造、航空航天、日常生活等。大學生有必要在校期間根據自身需求學習與機器人相關的課程[1-2]。實踐教學是人才培養中不可或缺的重要環節[3-4],也是培養學生創新意識和實踐應用能力的重要一環[5]。機器人實訓平臺在傳授知識、塑造理想、提升技能、完善品格等方面發揮了重要作用[6]。為適應和滿足未來社會需求,國內諸多高校相繼建立機器人實訓平臺,匹配了相應的機器人技術教學資源,開設了與之相關聯的課程。如中國礦業大學等高校以輪式移動機器人和類人機器人為載體構,建機器人實驗教學平臺,面向工科類學生開展創新實踐綜合性教育[7];西安工業大學從機器人工程專業需求出發,創建基于跨學科知識融合的機器人理論、層次化分模塊實踐、項目導向的課外實踐等教學模式[8];天津理工大學以優化設計及運動控制為研究對象,構建了開放性同型異構機器人實驗教學平臺,開展專業性較強的機器人實踐教育[9]。該類實驗教學項目具有專業性強、能力要求起點較高等特點,對于無專業基礎的文理科學生而言具有一定難度。鑒于此,河北工業大學搭建了一個以“認知、實踐、創新”為目標的層次化、竹節式機器人實踐教學體系,滿足了文科生認知了解機器人、理科生實踐搭建機器人和工科生創新設計機器人的需求。
1 機器人實踐教學體系的研究
圍繞學校“雙一流”建設下的人才培養目標,以滿足全年級所有專業學生實踐為目標,依托學校的機器人實踐平臺,探索了一條不同專業、各年級適用的機器人技術認知及實踐之路,形成了以工程認知能力培養為常態、以實踐動手能力培養為重點、以創新意識和能力培養為核心、以工程素質培養為目標的層次化、竹節式機器人實踐教學體系。具體的授課對象、實訓內容、教學目標等設置如圖1 所示。

圖1 機器人認知實踐教學體系
1.1 確定機器人認知實踐建設思路,構建竹節式多層次實踐教學體系
依托機器人實踐平臺,以全員學習機器人知識為目標,研究多層次的機器人教學體系構建之路。根據面向授課對象不同、文理工科學生學習目標不同、能力水平參差不齊等特征,將機器人教學劃分為了4 個層級,包括了以認知過程為導向的基礎層、以實踐過程為導向的能力提高層、以創新意識和能力培養為導向的綜合創新層和以工程素質培養為導向的自主創新層教學。
(1)以認知過程為導向的基礎層。2016 年,新工科的概念被提出[10],在其教育教學發展新需求中也提到了工科、新工科與人文社科之間的相互滲透關系,其具體表現為人文社科的專業知識無形影響工科學生文化素養的形成,新工科也對人文社科專業的工程認知能力提出了新的要求[11-12]。以工科為特色的高等院校是進行工程認知能力培養的良好基地,有著學科優勢。以“工學并舉”為特色的河北工業大學,工科是優勢學科,有著深厚的工程文化底蘊和豐富的實踐資源,多類型機器人設備、經驗豐富的教師等資源為開展機器人技術知識認知提供了便利。依托學校資源,筆者確定了以培養文理工科全年級工程認知能力和傳承“工學并舉”文化為宗旨,以了解基本知識、熟悉機器人結構為教學目標,通過整合輪式移動機器人、水下機器人、工業機器人等設備資源,設計了融科學性、趣味性和觀賞性為一體的教學內容。
以有趣的視頻吸引學生的注意力,如機器人跳舞、演奏等,使學生感知機器人;以工程文化之旅體驗機器人智能化工作過程,如深入基于機器人的汽車智能化車間,近距離觀看機器人實操過程,深刻體會機器人在現代制造技術領域的重要作用,了解工程文化;以身邊實物制作過程為題引導學生以科學的眼光看待機器人技術,如“自行車的主車體如何完成連接?”“汽車表面噴漆如何完成?”引導學生深入思考,引出機器人技術在日常生活中的重要性;以實操性強的機器人實物演示激發學生動手實踐內在需求,如水下機器人、輪式移動機器人和搬運機器人等自組裝過程及競賽演示。
(2)以實踐過程為導向的能力提高層。實踐是高等工程教育的基本特征之一[13],是知識轉化為能力的主要方式。故該層主要圍繞技能和實踐能力培養[14],以融合多知識點的項目為載體,通過動手實踐使學生有效應用機器人理論知識,掌握課堂所學知識點。
能力提高層設計了多個平行實驗項目,每個實驗項目可實現對一個或多個知識點的學習以及對一個或多個技能的鍛煉,同時,多個不同實驗項目也可實現對同一個知識點或同一個技能的學習和鍛煉。學生通過實踐訓練、模型構建、程序調試,掌握知識點,培養實踐動手能力。如學生利用舵機控制原理設計了簡易輪式移動機器人項目,實現舵機轉速控制;利用傳感器智能識別知識,驗證了難了具有相同功能的紅外測距傳感器和紅外接近傳感器在避障機器人系統中不同的應用效果對智能機器人利用攝像頭實現尋物功能進行訓練等。
(3)以創新意識和能力培養為導向的綜合創新層。該層設計了基于模塊化機器人套件和基于仿生機器魚套件的兩個實踐套餐,每個套餐含有多個實踐項目,每個項目包含設計、裝配及調試或設計、加工、裝配及調試環節,所用設備需至少含有一種機器人套件、一種三維設計軟件、一種零部件加工設備。如運球機器人項目,學生團隊根據項目功能需求,在現有套件基礎上,采用三維軟件創新設計機器人機械結構,利用3D 打印或激光切割機加工部分零部件,運用鉗工設備進行機器人裝配,接入編寫的控制程序開展動作調試,撰寫設計說明書。
(4)以工程素質培養為導向的自主創新層。工程素質的主要內涵包括四個方面:①有比較扎實的技術基礎;②受過必要的工程實踐訓練;③有分析和解決工程實際問題的能力;④能夠吃苦耐勞,適應較艱苦的工作環境。筆者在該層以四項工程素質培養為目標,設置了較高科技水平的科研項目、校企合作項目、匠心訓練項目和競賽項目等實踐內容(見表1)。

表1 實踐項目與工程素質培養匹配表
1.2 常規式和開放式并行的機器人實踐運行模式
機器人實踐運行模式根據教學層次的不同而采取了常規式和開放式混合式教學模式(如圖2 所示),實現了并行運行。常規式是在固定時間、地點、資源的模式下進行常態化教學,包含了工程訓練系列必修課、公共選修課等;開放式是在時間、地點、資源開放模式下進行的自主化教學,需要通過網上預約審核流程進行實踐,每組4~6 名學生在教師的指導下于一個學期內完成實踐項目。
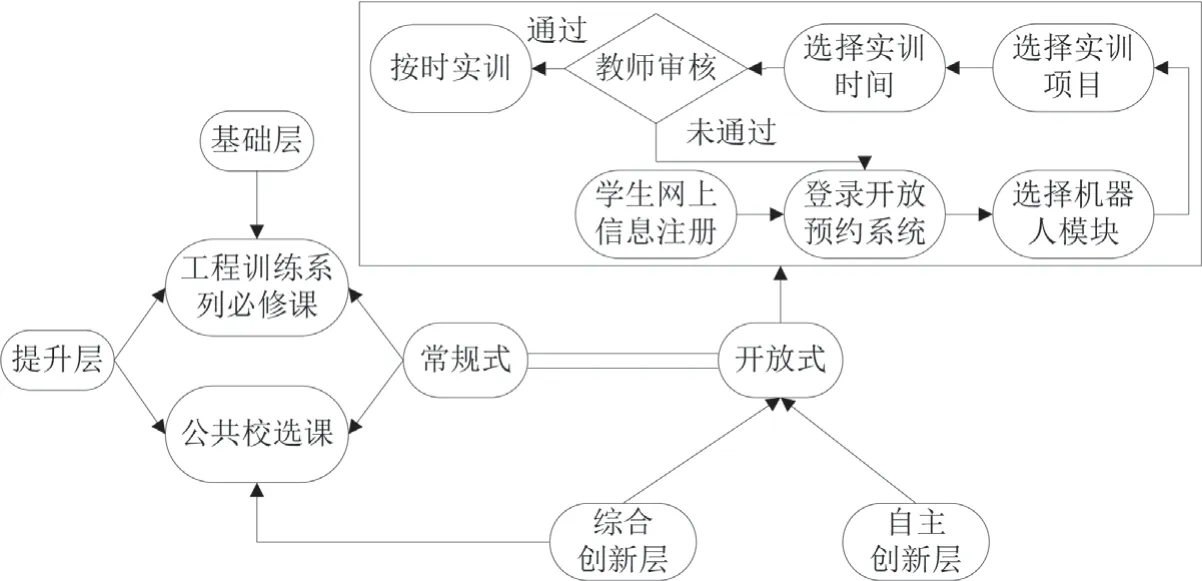
圖2 機器人實踐教學體系運行模式
1.3 實訓成績評定
教師根據學習層次的不同對學習成績做了不同的評分標準,成績評定表見表2 所示。
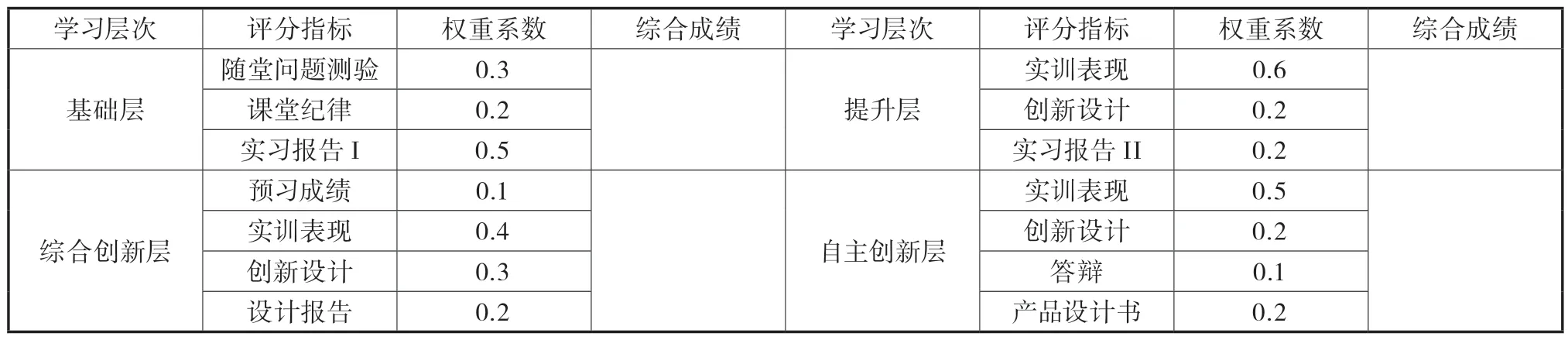
表2 成績評定表
2 機器人實踐效果
自2017 年開始,學校開設了面向全校專業學生的工程認知課程,機器人技術認知課是其中之一。近兩年的課程滿意度調查結果顯示,機器人技術認知課在12 門認知課中名列前三,受到了廣大學生的好評。
2018 年伊始,四個小組12 位學生參加大學生機器人競賽,經過近半年的獨立學習,從機器人文獻調研、方案設計、原理設計、零件加工到實物功能實現,在天津市機器人賽事上獲得了一等獎和二等獎各兩項;在河北省機器人競賽中獲得了一等獎兩項和二等獎一項;在國賽中獲得了特等獎和三等獎各一項。學生進行實踐訓練與競賽的部分作品如圖3 所示。
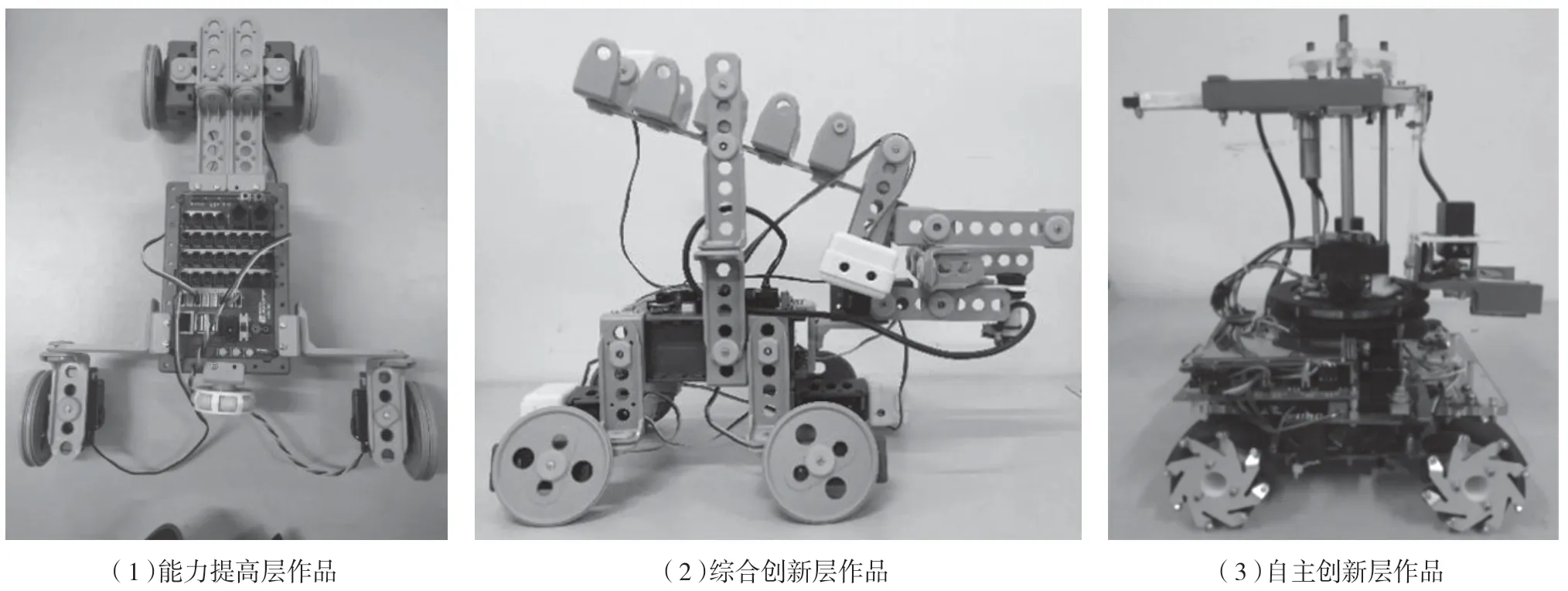
圖3 學生作品
3 結語
“認知、實踐、創新”的層次化、竹節式機器人實訓平臺建設,一方面完善和優化了機器人實訓體系,實現了機器人技術知識學習的全覆蓋;另一方面也更加契合了理、工、文科不同專業學生對機器人實踐的需求。通過該系統下的機器人知識學習,有效提高了學生的學習興趣,激發了學生的學習熱情,促進了學生學習效率的提高。
猜你喜歡
發明與創新(2022年30期)2022-10-03 08:40:56
裝備制造技術(2020年12期)2020-05-22 09:25:38
人大建設(2018年6期)2018-08-16 07:23:10
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
電子制作(2017年8期)2017-06-05 09:36:15
太空探索(2016年6期)2016-07-10 12:09:06
信息記錄材料(2016年4期)2016-03-11 15:22:54
小星星·閱讀100分(低年級)(2015年10期)2015-10-22 08:30:04
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
筑路機械與施工機械化(2015年8期)2015-01-11 09:24:54