基于多源數(shù)據(jù)的BKlob 模型精細(xì)化
2023-07-31 10:58:28劉家龍朱永興賈小林宋淑麗程娜
全球定位系統(tǒng) 2023年3期
劉家龍,朱永興,賈小林,宋淑麗,程娜
(1.中國科學(xué)院上海天文臺,上海 200030;2.中國科學(xué)院大學(xué),北京 100080;3.西安測繪研究所,西安 710054;4.地理信息工程國家重點實驗室,西安 710054;5.山東建筑大學(xué)測繪地理信息學(xué)院,濟(jì)南 250101)
0 引言
電離層包括地面60 km 以上至磁層頂?shù)恼麄€大氣層空間,該區(qū)域大氣在紫外線、X 射線等高能射線的輻射作用下發(fā)生電離,從而產(chǎn)生大量的自由電子,形成一個由帶電粒子組成、整體仍為中性的電離層區(qū)域[1-3].電離層的時空特性具有隨機(jī)性、不平衡性、無序性等特點,對衛(wèi)星導(dǎo)航、短波通信、雷達(dá)監(jiān)測有重要影響[4].電離層延遲誤差是全球衛(wèi)星導(dǎo)航系統(tǒng)(GNSS)的主要誤差源之一,引起測距誤差可達(dá)數(shù)十米.由于電離層折射率的頻率分散性,電離層誤差可以通過兩個或兩個以上的頻率進(jìn)行組合來消除.但對于單頻用戶來說,采用廣播電離層模型進(jìn)行電離層延遲修正,提高實時定位服務(wù)精度,仍是現(xiàn)行主流高效的手段[5-6].
目前主要的GNSS 系統(tǒng)均可提供廣播電離層改正服務(wù),主要有GPS Klobuchar 模型(GPSklob 模型)、Galileo NeQuick 模型(NeQuick G 模型)、BDS Klobuchar 模型(BDSklob 模型)和北斗全球廣播電離層延遲修正模型(BDGIM 模型).北斗三號(BDS-3)開通了全球化服務(wù),BDSklob 模型的服務(wù)區(qū)域也隨著B1I 和B3I 頻點拓展服務(wù)全球.對于繼續(xù)使用北斗B1I 和B3I 頻點的用戶來說,還需要BDSklob 模型進(jìn)行電離層延遲修正.另外,由于GPSklob 已被用戶廣泛接受和熟悉,學(xué)者們自然也對BDSklob 模型全球化后的性能給予極大關(guān)注.在不同太陽活動水平下,BDSklob 模型具有較高適應(yīng)性,對各種異常條件能夠保障數(shù)據(jù)可靠性.針對北斗廣播電離層服務(wù)性能,Zhu 等學(xué)者以實測電離層數(shù)據(jù)為參考對比分析了BDGIM 和BDSklob 模型的性能[7-9].BDGIM 模型在全球范圍、亞太區(qū)域以及中國區(qū)域改正率分別可達(dá)67.72%、70.69%、74.27%,而BDSklob 模型改正率分別為38.12%、44.90%、57.70%.BDSklob 模型以Klobuchar 模型為理論模型,為區(qū)域解算,亞太以外區(qū)域精度不均勻,極區(qū)有異常.BDSklob 模型的廣播電離層模型改正參數(shù)在B1I/B3I 頻點播發(fā),BDGIM 模型的參數(shù)在B1C/B2a頻點播發(fā),部分接收機(jī)僅支持B1I/B3I 頻點,但迫切需要高精度定位服務(wù)[10],因此對BDSklob 模型進(jìn)行精化是非常有必要的.
針對提升BDSklob 模型的精化處理方案,可分為參數(shù)精化法和模型精化法.參數(shù)精化法是利用數(shù)學(xué)方法,在已有廣播電離層模型8 參數(shù)的基礎(chǔ)上對其進(jìn)行二次解算,使其具有更好的修正效果,如最小二乘法、序貫平差法、松弛搜索法、經(jīng)驗?zāi)P屯馔品ǖ萚11-14].其中松弛搜索法算法流程簡單,運算速度快,且具有較高精度.模型精化方法是在Klobuchar 原有模型基礎(chǔ)上附加考量其他影響因素增加或刪減參數(shù),達(dá)到提升模型的性能效果.如,基于電離層季節(jié)變化特性以及實時太陽流量考量,將Klobuchar 基礎(chǔ)8 參數(shù)模型簡化至2 參數(shù)[15];為了進(jìn)一步修正基礎(chǔ)理論模型中的振幅、常量等,引入太陽相對黑子數(shù)提出了Klobuchar 9 參數(shù)模型[16];基礎(chǔ)模型將夜間修正值設(shè)為常量,為此多引入兩個參數(shù),使得夜間模型精度得到了顯著提升[17];除此之外,還提出了14 參數(shù)模型、15 參數(shù)模型以及Klobuchar-like 模型等[18-20].
兩種精化方法各有優(yōu)缺點:模型精化法,增加或刪減模型參數(shù),構(gòu)建新的模型,雖然模型精度大幅度提升,但對用戶來說增加了繁瑣的計算流程;參數(shù)精化法大多采用事后的全球電離層格網(wǎng)(GIM)或?qū)崪y數(shù)據(jù)進(jìn)行精化操作,達(dá)到提升模型精度的目的,但此種方法具有一定的滯后性,不能實時滿足用戶的應(yīng)用需求.基于北斗現(xiàn)狀,從運控端考慮對現(xiàn)有的BDSklob基礎(chǔ)模型進(jìn)行精化,本文提出了利用多源數(shù)據(jù)進(jìn)行BDSklob 精化處理.基于參數(shù)精化方案,采用三種數(shù)據(jù)來源進(jìn)行精化處理,分別為:經(jīng)驗?zāi)P蛿?shù)據(jù)、BDGIM模型數(shù)據(jù)以及GIM 產(chǎn)品.
經(jīng)驗?zāi)P蛿?shù)據(jù)具有預(yù)知性、便捷性等特點,采用經(jīng)驗?zāi)P妥鳛閰⒖紨?shù)據(jù)進(jìn)行精化處理,可以保證用戶實時獲取高精度的定位服務(wù).經(jīng)驗?zāi)P统R姷挠腥騾⒖茧婋x層模型(IRI 模型)、NeQuick 模型、Bent 模型等.由于IRI 模型對電離層分層建模,日變化及季節(jié)變化趨勢與實測數(shù)據(jù)高度一致性,所以具有較高的精度[21-22],IRI 模型最新版本為IRI Plas-2017,全面考慮了60~20 000 km 的電子含量[23].目前,國內(nèi)外比較有名的電離層分析中心有歐洲定軌中心(CODE)、中國科學(xué)院(CAS)、噴氣推進(jìn)實驗室(JPL)等.而CODE的GIM 產(chǎn)品(CODG)是最準(zhǔn)確且免費的產(chǎn)品之一[24].BDGIM 和BDSklob 模型同屬于BDS 廣播電離層模型,BDGIM 模型改正精度總體優(yōu)于BDSklob 模型,采用BDGIM 模型數(shù)據(jù)進(jìn)行精化可以保證精化過程不借助外部數(shù)據(jù)源,系統(tǒng)內(nèi)部進(jìn)行處理,同時保障BDSklob 模型精度.綜上所述,本文以參數(shù)精化方法-松弛搜索法為基礎(chǔ),利用經(jīng)驗?zāi)P蛿?shù)據(jù) IRI-Plas-2017模型、BDGIM 模型以及CODG 作為參考數(shù)據(jù)進(jìn)行精化處理(簡稱:BDSklob_I、BDSklob_B、BDSklob_C),在不同條件下分析各數(shù)據(jù)源精化服務(wù)的優(yōu)劣性,為用戶的不同需要提供判斷依據(jù),并為后續(xù)BDSklob 模型性能的進(jìn)一步提升提供理論參考.
1 原理方法
BDSklob 模型為地理坐標(biāo)系下的Klobuchar 模型,如下所示:
BDSklob 參數(shù)模型為非線性模型,利用松弛迭代法進(jìn)行參數(shù)精化迭代效果最優(yōu).采用松弛搜索法進(jìn)行迭代處理無需方程組的運算和矩陣求解處理,將高維數(shù)組轉(zhuǎn)化為一維數(shù)組進(jìn)行迭代處理,直至滿足預(yù)設(shè)精度.
松弛搜索法原理如下:
引入目標(biāo)函數(shù)Ψ (X) :
式中:X為待求解的電離層參數(shù);n為該時段數(shù)據(jù)量;fi(X) 為電離層時延擬合值;Ti為電離層時延實測值.
假設(shè)fi(X) 的一階導(dǎo)數(shù)及二階導(dǎo)數(shù)均存在,則可求出關(guān)于目標(biāo)函數(shù)的一階及二階導(dǎo)數(shù):
利用遞推公式進(jìn)行搜索求解:
式中,λk為松弛因子.
若已知參數(shù)的初始值X0,對各個參數(shù)進(jìn)行一維搜索求解,搜索方向為對松弛因子 λk>0 的選取,使Ψ(Xk)<Ψ(Xk-1).對于給定精度 ε >0,當(dāng)
成立時,則停止計算;否則繼續(xù)搜索直至滿足式(12).
模型計算中電離層延遲值單位為ns,后續(xù)實驗中統(tǒng)一轉(zhuǎn)換為電子總含量(TEC)單位TECU 進(jìn)行對比分析.
2 實驗分析
2.1 實驗方法
電離層變化具有明顯的季節(jié)性規(guī)律,本文利用2019 年兩分兩至點數(shù)據(jù)即年積日80、172、266、356 的數(shù)據(jù)展開實驗.參數(shù)精化方法選擇松弛迭代法,模型相對簡單運算速度快、精度較高.經(jīng)驗?zāi)P蛿?shù)據(jù)、BDGIM 模型數(shù)據(jù)輸出的GIM 數(shù)據(jù)以及CODG 設(shè)置為目標(biāo)數(shù)據(jù),對此進(jìn)行參數(shù)迭代分析.迭代后參數(shù)代入BDSklob 模型,最后進(jìn)行精度驗證,判斷各個數(shù)據(jù)源精化處理后的性能.精度評估包括與CODG 比較、與GNSS 實測數(shù)據(jù)比較和定位性能分析等三個方面,具體如下:
1)精化處理后模型BDSklob_I、BDSklob_B、BDSklob_C 以及基礎(chǔ)模型BDSklob 模型輸出的TEC與CODG 做對比分析,分析其在全球、亞太地區(qū)以及不同緯度帶的性能.
2)在全球均勻選擇35 個GNSS 觀測站,如圖1所示.各精化后模型數(shù)據(jù)以及基礎(chǔ)BDSklob 模型的TEC 值與GNSS 觀測站中提取的實測數(shù)據(jù)進(jìn)行對比分析,統(tǒng)計其在單獨測站上的偏差值以及不同緯度帶上的精度.
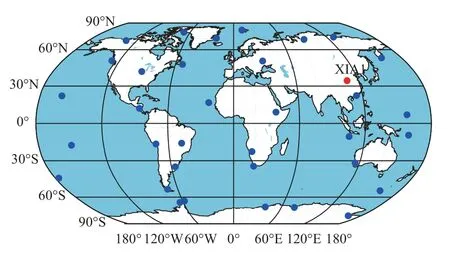
圖1 GNSS 觀測站分布圖
3)廣播電離層模型為導(dǎo)航定位最大的誤差源之一,為分析精化前后對定位性能的提升效果,選取BDSklob 模型主要服務(wù)區(qū)中的觀測站XIA1 測站,進(jìn)行精化前后單頻標(biāo)準(zhǔn)單點定位(SPP)精度分析.
主要評估指標(biāo)包括平均偏差(bias)、均方根(RMS)以及改正率(PER).其中bias 和RMS 為模型輸出TEC 和參考值之間偏差的平均值以及均方根,PER 為模型輸出值相對參考值的修正百分比.PER 為相對精度指標(biāo),而平均偏差和RMS 為絕對精度指標(biāo),具體計算公式如下:
2.2 BDSklob 精化前后與CODG 對比
圖2 為多源數(shù)據(jù)精化前后BDSklob 模型與CODG全球的TEC 偏差分布圖,可以看出:

圖2 多源數(shù)據(jù)精化前后BDSklob 模型與CODG TEC 偏差
1) BDSklob 模型在主要服務(wù)區(qū),亞太地區(qū)性能良好,偏差約為10 TECU;而在極地區(qū)域性能較差,最高偏差可達(dá)40 TECU.
2) 多源數(shù)據(jù)精化處理后的BDSklob_B、BDSklob_C 以及BDSklob_I 模型偏差最大為16 TECU.
3) 精化前后,極地區(qū)域性能提升最為明顯,性能提升約25 TECU,在亞太地區(qū)性能提升約5 TECU.
為了更加詳細(xì)直觀地分析精化前后精度情況,表1 統(tǒng)計了精化處理前后BDSklob 模型在全球及模型主要服務(wù)區(qū)亞太地區(qū)的精度.可以看出:
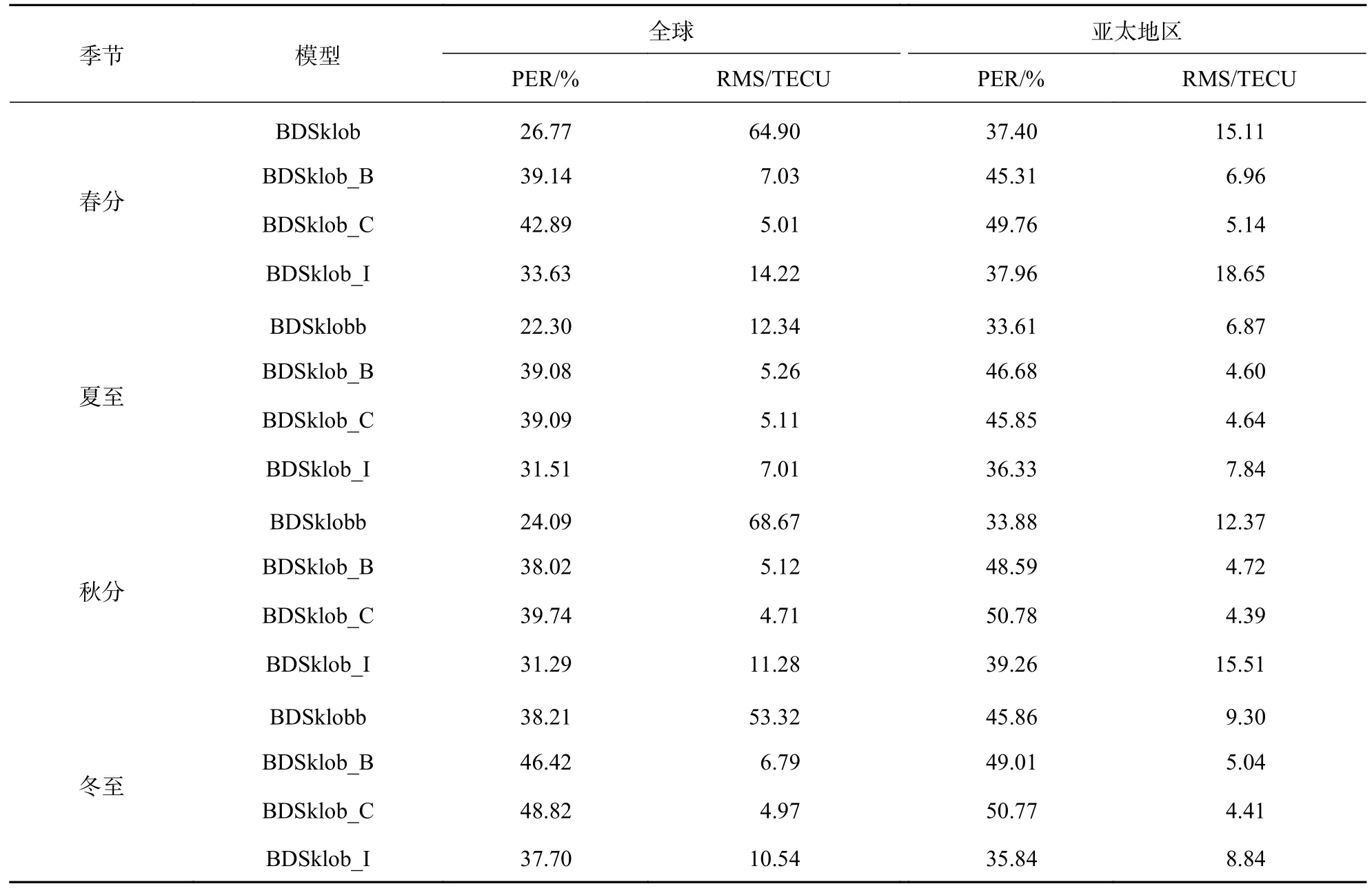
表1 精化前后BDSklob 模型全球及區(qū)域精度統(tǒng)計
1) 多源數(shù)據(jù)處理后精度有了顯著提升,在春分、夏至、秋分、冬至全球范圍PER 最高可提升約16%、17%、15%、10%,在亞太區(qū)域PER 最高可提升約12%、13%、17%、10%.
2) RMS 在精化處理前后,在兩分兩至點全球范圍最高可降低60 TECU、7 TECU、64 TECU、50 TECU,在亞太區(qū)域RMS 最高可降低10 TECU、14 TECU、8 TECU、10 TECU.
3) 總體來看利用CODG 精化即BDSklob_C 效果最佳,BDSklob_B 次之,經(jīng)驗?zāi)P虰DSklob_I 性能一般.季節(jié)性變化對精化處理性能影響不大.
4) 相較于RMS 來說,PER 看起來沒有特別直觀,這是由于多數(shù)模型值與參考值偏差大于參考值,統(tǒng)計時此種情況PER 按0 統(tǒng)計,RMS 為絕對精度指標(biāo),精化前后效果更加明顯.
圖3、4 為精化前后BDSklob 模型在各緯度帶上的精度統(tǒng)計,區(qū)域劃分如下:區(qū)域1 為60°~90°、區(qū)域2為30°~60°、區(qū)域3 為0°~30°、區(qū)域4 為-30°~0°、區(qū)域5 為-60~-30°、區(qū)域6 為-90°~-60°.可以看出精化前后不同緯度帶上精度有了明顯提升,其中在極地區(qū)域性能提升最為明顯,最高可提升40%.由表1可知,相對精度PER 有時會出現(xiàn)0 的情況,所以絕對精度RMS 會更具有參考意義.RMS 不做剔除處理,在極地區(qū)域精化前后最高可降低100 TECU.在不同緯度帶上,總體來看依然是BDSklob_C 性能最佳,BDSklob_B 次之,經(jīng)驗?zāi)P虰DSklob_I 相對較差.
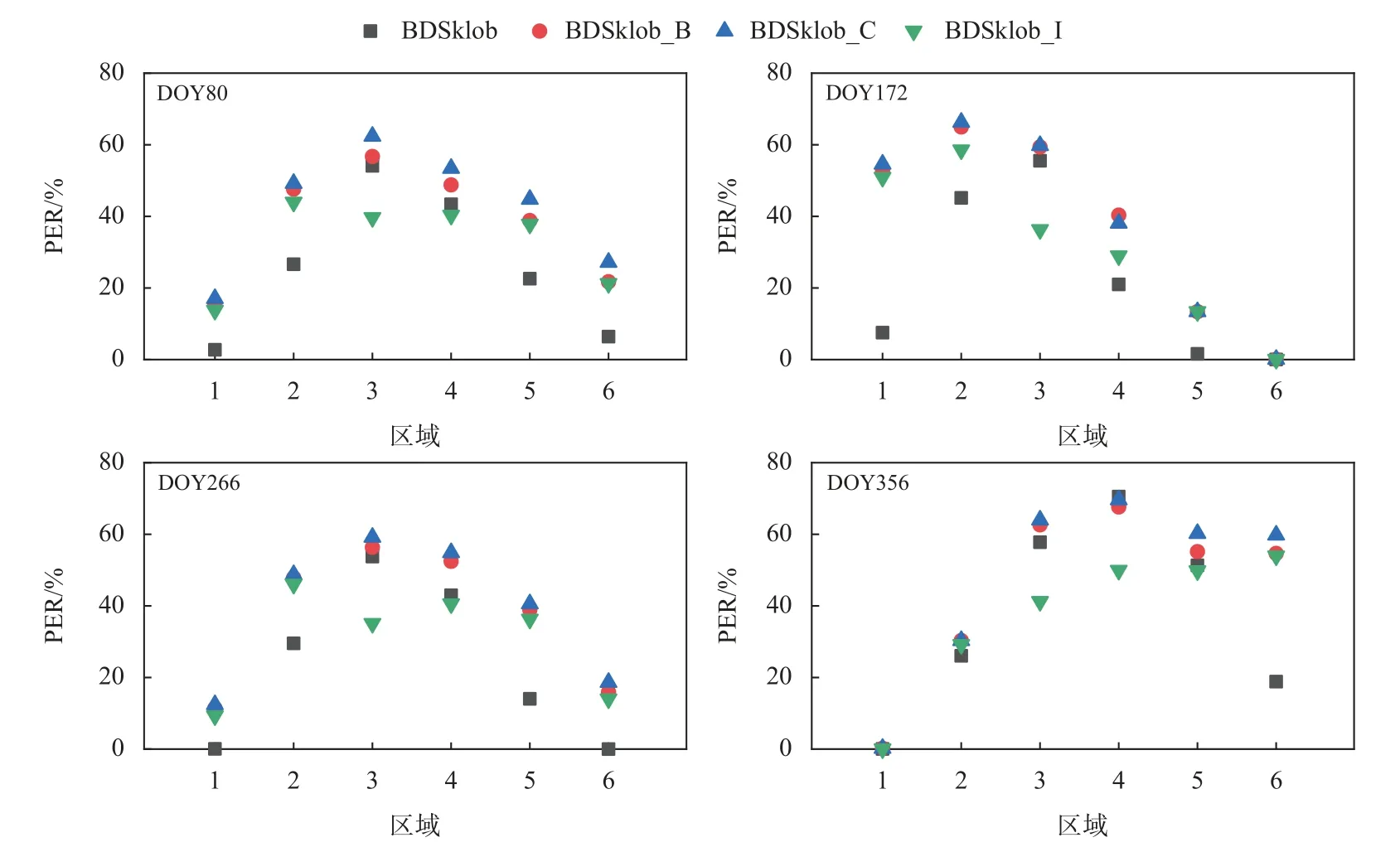
圖3 精化前后BDSklob 模型在不同區(qū)域上的改正率
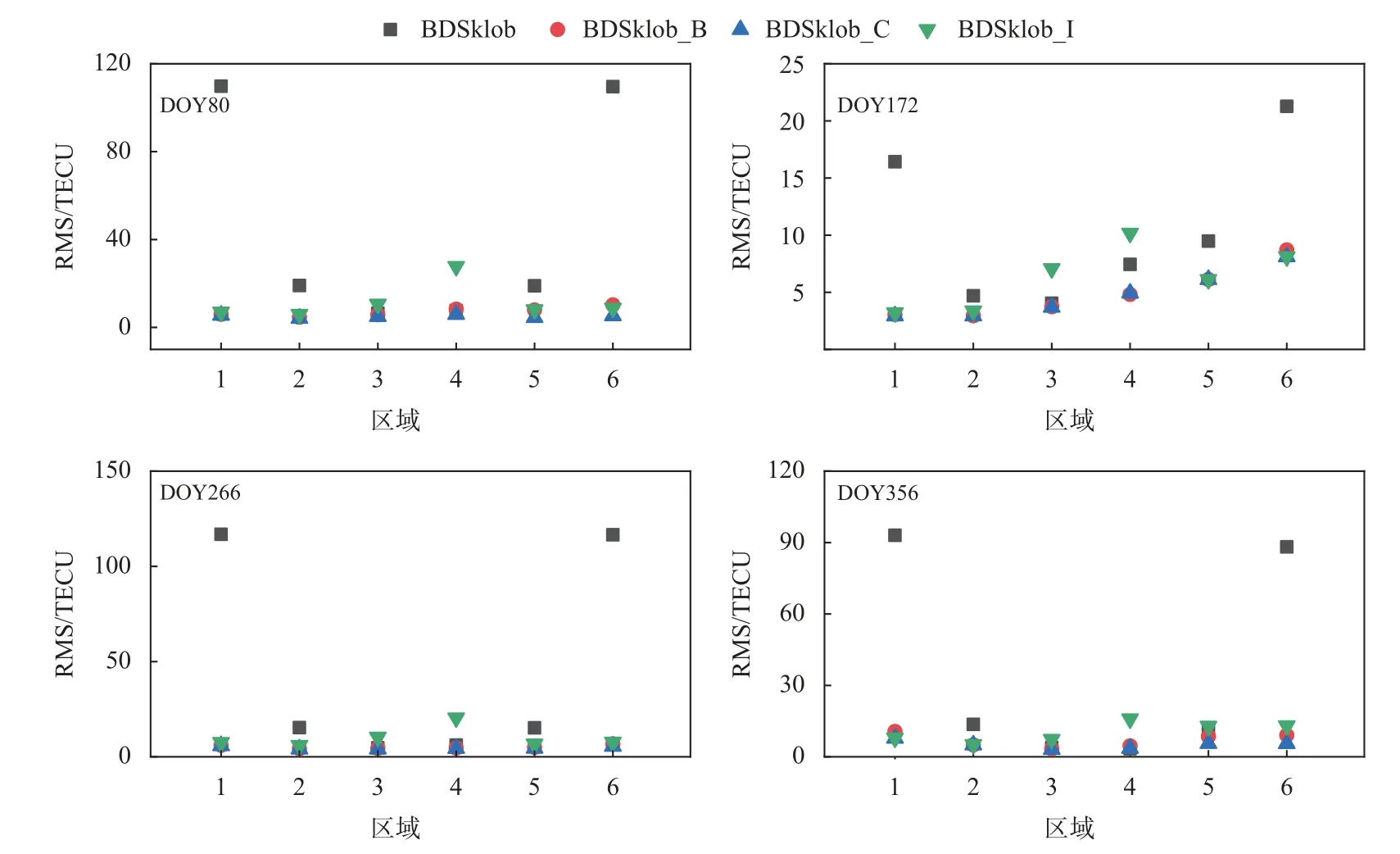
圖4 精化前后BDSklob 模型在不同區(qū)域上的RMS
2.3 BDSklob 精化前后與GNSS 實測數(shù)據(jù)對比
圖5 為多源數(shù)據(jù)精化前后BDSklob 模型TEC 與實測數(shù)據(jù)在各觀測站上的TEC 偏差,可以看出:
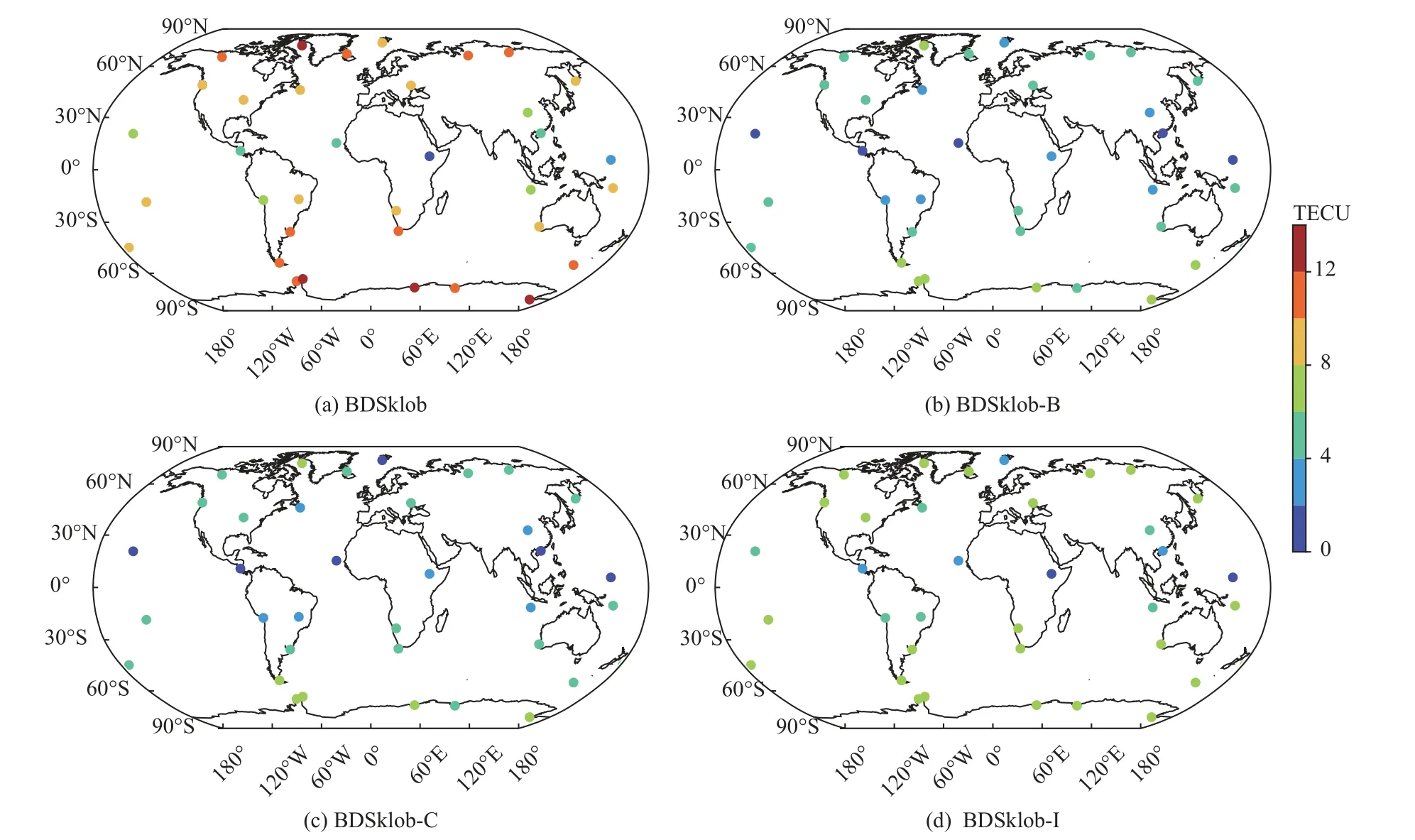
圖5 2019 年DOY172 多源數(shù)據(jù)精化前后BDSklob 模型與GNSS 實測TEC 偏差
1)精化前BDSklob 模型在各個觀測站上偏差為8~14 TECU,越高緯度區(qū)域測站偏差越大,與前文統(tǒng)計結(jié)果一致.
2)精化后模型與實測TEC 偏差最高為6 TECU.在極地區(qū)域精化前后變化較為明顯,偏差降低約7 TECU.
為了更好統(tǒng)計精化前后精度變化,圖6 以GNSS實測數(shù)據(jù)為基準(zhǔn),統(tǒng)計了不同緯度帶上精化前后BDSklob 模型的精度.可以看出:
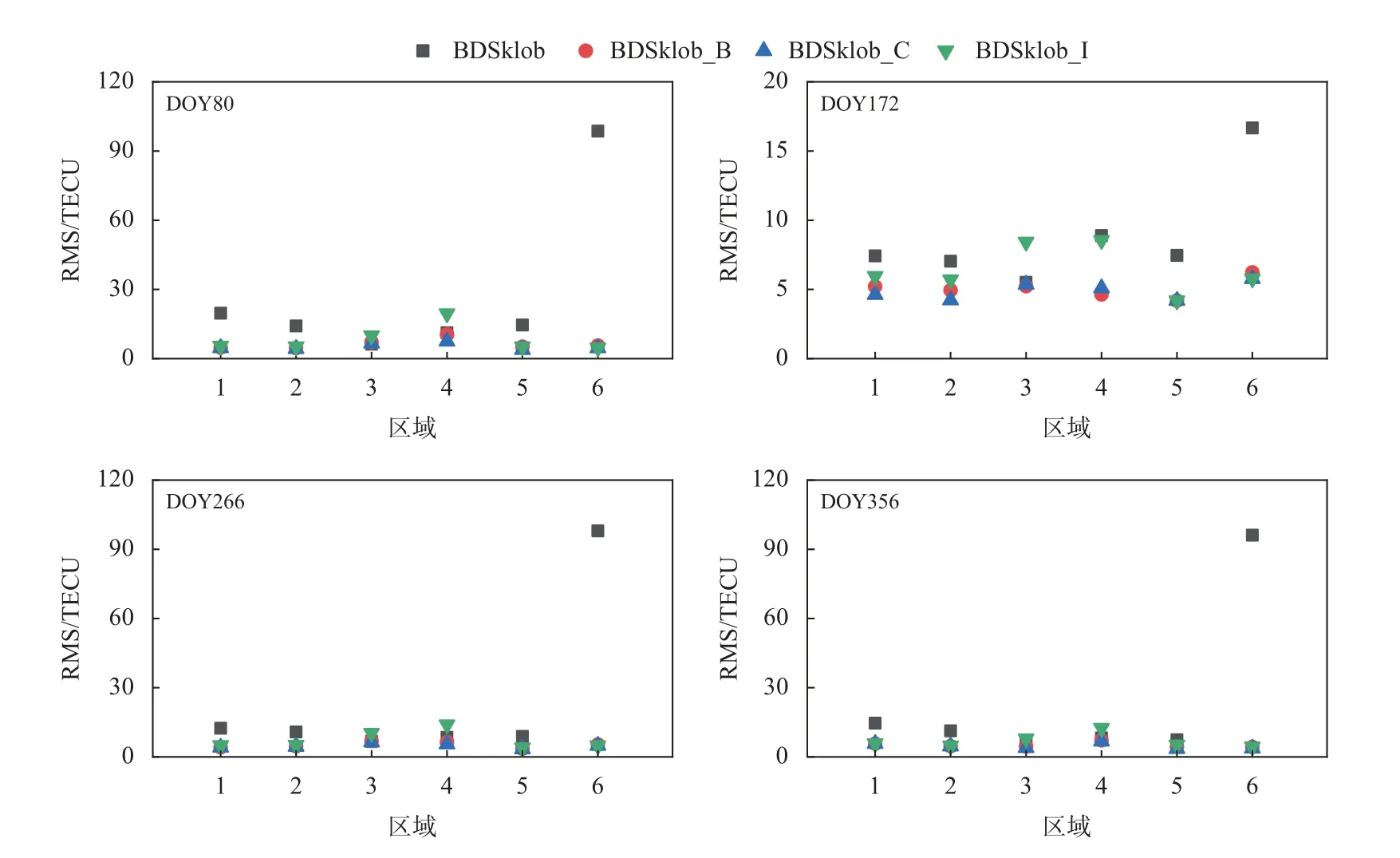
圖6 以GNSS 實測TEC 為基準(zhǔn)精化前后BDSklob 模型在不同區(qū)域上的RMS
1)在高緯度地區(qū)即極地區(qū)域精化程度最高,南半球高緯度地區(qū)精化前RMS 可達(dá)近100 TECU,精化后為5 TECU 左右,且跟選定的站點有關(guān).
2)以實測數(shù)據(jù)進(jìn)行統(tǒng)計來看,BDSklob_C 性能最佳,BDSklob_B 次之,經(jīng)驗?zāi)P虰DSklob_I 相對差一些,和以GODG 為基準(zhǔn)的統(tǒng)計結(jié)果一致.
2.4 BDSklob 精化前后定位性能影響分析
從前文可知多源數(shù)據(jù)對BDSklob 精化前后模型性能有了顯著的提升,電離層延遲對定位性能影響是極大的,為此我們選取了BDSklob 模型主要服務(wù)區(qū)內(nèi)的XIA1 測站,分析改測站在2019 年兩分兩至點即年積日80、172、266、356 精化前后單頻SPP 定位性能.
圖7 給出了2019 年兩分兩至點XIA1 測站三維方向RMS 精度,圖8 為BDSklob 精化前后XIA1 測站上定位精度時間序列結(jié)果,可以看出:
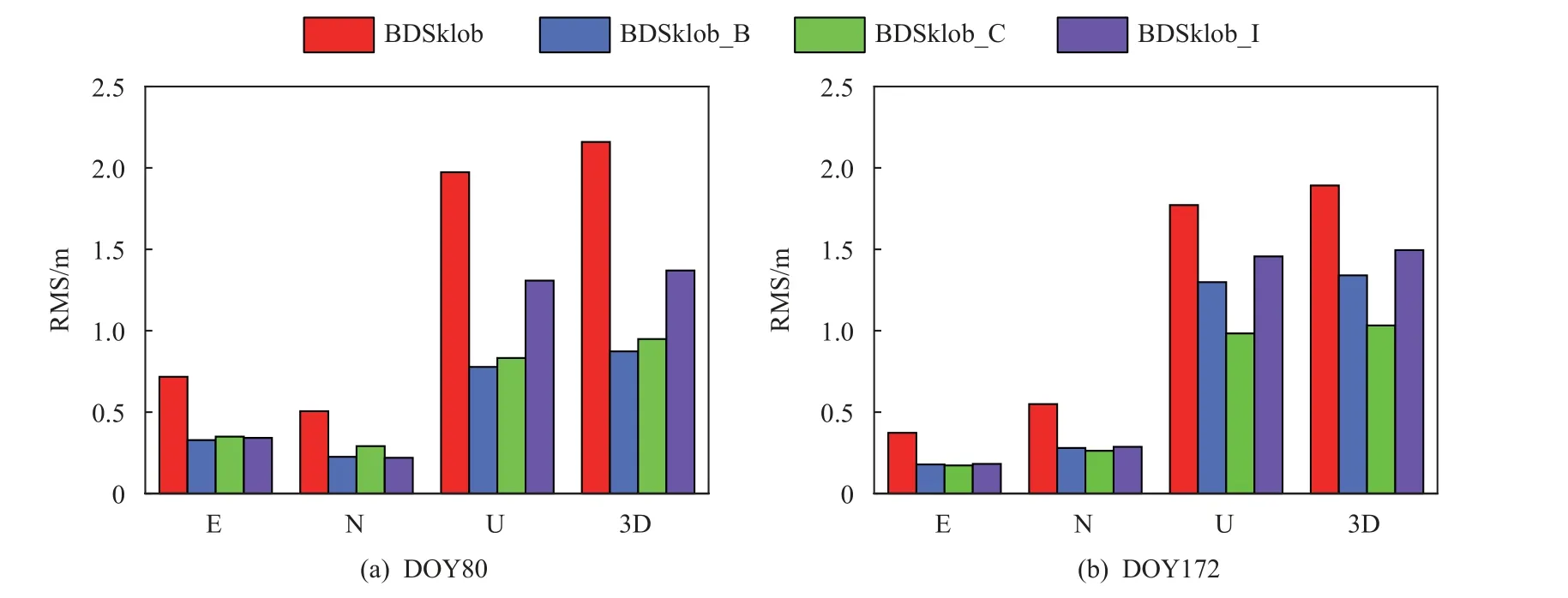
圖7 2019 年兩分兩至日XIA1 測站定位精度
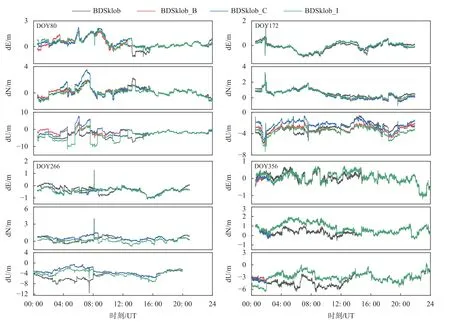
圖8 XIA1 測站定位誤差序列圖
1) 定位結(jié)果差異主要體現(xiàn)在高程方向,徑向和切向精化前后偏差并不明顯.高程方向上定位誤差相對較大一些,同時精化前后差異也較大,最高精化前后高程方向定位精度最高可提升8 m.
2) 季節(jié)性變化對定位精度結(jié)果影響較小,多源數(shù)據(jù)精化方法受季節(jié)影響較弱.
3) 精化處理前后,E 方向上RMS 最高可降低0.4 m,N 方向上RMS 最高可降低0.3 m,U 方向上RMS 最高可降低1.5 m,3D 方向上RMS 最高可降低0.9 m.
4) 總體來看BDSklob_C 性能最佳,BDSklob_B 次之,經(jīng)驗?zāi)P虰DSklob_I 相對來說性能較差,和之前電子含量統(tǒng)計結(jié)果一致.
3 討論
本文針對BDSklob 采用了多源數(shù)據(jù)精化處理方法,基于松弛搜索法,利用經(jīng)驗?zāi)P虸RI-Plas-2017 模型、CODE 的GIM 產(chǎn)品,以及北斗本身系統(tǒng)的BDGIM模型數(shù)據(jù)作為目標(biāo)數(shù)據(jù)進(jìn)行精化處理.不同數(shù)據(jù)源處理后結(jié)果精度稍有差異,且對BDSklob 模型的性能均有明顯提升.其中BDSklob_C 處理結(jié)果精度最高,但由于其滯后性僅適用于高精度需求用戶;BDSklob_B 模型精度次之,其不借助于外部數(shù)據(jù)源,在北斗自系統(tǒng)中即可完成精化處理;BDSklob_I 相較于其他兩種精度稍差,但經(jīng)驗?zāi)P途哂蓄A(yù)測性,可以同步進(jìn)行精化處理,滿足用戶實時性的需要.
本次研究中僅進(jìn)行了2019 年兩分兩至日的精化實驗,未能系統(tǒng)性長時序地對多源數(shù)據(jù)精化實驗進(jìn)行探究,后續(xù)在實驗時間充足的條件下可進(jìn)一步探究.另外除了松弛搜索法外,還有更多高精度的參數(shù)精化方法,后續(xù)可利用多源數(shù)據(jù)對不同參數(shù)精化方法進(jìn)行對比分析,選擇更為簡便更高精度的BDSklob 精化方法.
4 結(jié)束語
針對BDS-2 期間BDSklob 模型在服務(wù)區(qū)域外精度不高、兩極地區(qū)改正異常情況,提出了基于參數(shù)精化方法,利用經(jīng)驗?zāi)P虸RI-Plas-2017、BDGIM 模型以及CODE GIM 產(chǎn)品等多源數(shù)據(jù),精化BDSklob 模型.采用與CODE 產(chǎn)品比較、與雙頻觀測量比較和定位性能提升,分析了多源數(shù)據(jù)精化BDSklob 模型精度提升情況,結(jié)果表明:
1) 各個數(shù)據(jù)源對BDSklob 性能都有明顯提升,尤其是在極地區(qū)域.其中BDSklob_C 精度最高,BDSklob_B 模型精度次之,BDSklob_I 性能相對較差.
2) 以CODE 的GIM 產(chǎn)品為基準(zhǔn),多源數(shù)據(jù)精化方法,在全球范圍RMS 最高可降低60 TECU,在亞太地區(qū)可降低15 TECU,在極地區(qū)域可降低100 TECU.
3) 以GNSS 實測數(shù)據(jù)為基準(zhǔn),極地區(qū)域RMS 最高可降低約100 TECU.
4) 采用精化前后BDSklob 模型,單頻SPP 定位3D RMS 值最高可降低0.9 m.
BDSklob_C、BDSklob_B 以 及BDSklob_I 精 化方法都對BDSklob 模型精度有了顯著的提升,BDSklob_C 可以滿足高精度用戶的需求,BDSklob_B可保證精化處理的獨立性,而BDSklob_I 具有高效的實時性.隨著人們高精度定位需求的增強,BDSklob模型的性能需要進(jìn)一步完善,后續(xù)可采用多源數(shù)據(jù)多模算法進(jìn)行BDSklob 的精化處理,保證BDSklob 模型的服務(wù)性能.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52
