基于“一線兩向”模式下的無人機輸電線路高效巡檢方式研究
2023-07-26 03:42:08嚴峻超徐建軍徐軍波文香桂王力項戀
電子制作 2023年12期
關(guān)鍵詞:卡爾曼濾波
嚴峻超,徐建軍,徐軍波,文香桂,王力,項戀
(國網(wǎng)江西省電力有限公司鷹潭供電分公司,江西鷹潭,335001)
0 引言
架空輸電線路是保障電力遠距離安全輸送的基礎(chǔ),更會直接影響電力系統(tǒng)運行的安全性和可靠性[1]。在實際應(yīng)用中,架空輸電線路往往具有地形復(fù)雜、分布范圍廣、所處自然環(huán)境惡劣等特點,傳統(tǒng)巡檢方式使用人工進行逐點排查,其時間效率低、危險系數(shù)高,難以滿足目前持續(xù)擴大的桿塔分布范圍和愈加復(fù)雜的故障排查流程[2]。
實踐證明,近年來市場上使用無人機進行電力巡檢的系統(tǒng)具有工作量大、效率低、對飛手要求高等問題。目前對電力線路的精細化巡檢中,普遍還是飛手動操作無人機[3-4],完成無人機空中懸停、對準(zhǔn)、拍照,整個過程效率低、對飛手要求高。
為高效地實現(xiàn)塔間架空導(dǎo)線跟蹤飛行,完成缺陷精準(zhǔn)識別與實時飛行跟蹤,本文將PaddlePaddle-YOLO(PP-YOLO)與卡爾曼濾波算法相結(jié)合,PP-YOLO 配合無人機上搭載云臺相機傳回的視頻數(shù)據(jù),給出抽幀識別結(jié)果,傳輸卡爾曼濾波跟蹤模塊,計算無人機的最優(yōu)移動路徑與云臺相機的最優(yōu)調(diào)整策略。
1 架空輸電線路無人機高效巡檢方法
■1.1 “一線兩向”無人機高效巡檢模式
目前使用飛手手工操作的無人機巡檢模式受限于控制精度低,肉眼故障排查困難的特點,大都采用“一塔多點”的巡檢模式,對單個桿塔的多個目標(biāo)點位進行停留拍攝。“一塔多點”模式需要兩個飛手協(xié)助,一個飛手控制無人機的移動,另一個飛手觀察相機傳回圖像,對每座桿塔上多個關(guān)鍵巡檢點位進行拍攝,同時實時觀察并拍攝出現(xiàn)的異常點位,具有工作量大、時間長、效率低、對飛手要求高的特點,且移動過程中傳回的視頻數(shù)據(jù)冗余較多,效率不高。
■1.2 無人機仿線飛行技術(shù)
仿線飛行技術(shù)的前身是仿地飛行。仿地飛行是一種無人機飛行路線控制技術(shù),他通過設(shè)定與已知三維地形的固定高度,使得飛機與目標(biāo)地物保持恒定高差,保持無人機的地面分辨率一致。仿地飛行使用地圖公開數(shù)據(jù)庫中的地形信息和預(yù)掃飛行時軟件錄入的高程數(shù)據(jù)規(guī)劃航線,需要一定的先驗數(shù)據(jù)并人工設(shè)定飛行模式。
仿線飛行則是將仿地飛行中以地面為參照物改為以電線為參照物,通過視覺識別算法自動識別電線、絕緣子等位置,從而完成姿態(tài)調(diào)整、跟蹤拍攝等一系列操作。完整的飛行周期可分為繞桿U 字形航線與仿線飛行兩個部分,整個過程持續(xù)使用云臺相機進行數(shù)據(jù)采集并反饋給云臺,實時監(jiān)測塔間缺陷。
2 無人機AI 視覺識別與目標(biāo)跟蹤
本章基于PP-YOLO 和卡爾曼濾波算法搭建AI 視覺識別與目標(biāo)跟蹤模塊,完成無人機的塔間導(dǎo)線跟隨飛行與缺陷實時檢測等任務(wù),圖1 給出了無人機智能計算模塊的整體框架。同時還介紹了以PP-YOLO 為核心算法的AI 視覺識別模塊和以卡爾曼濾波為核心算法的目標(biāo)跟蹤模塊。
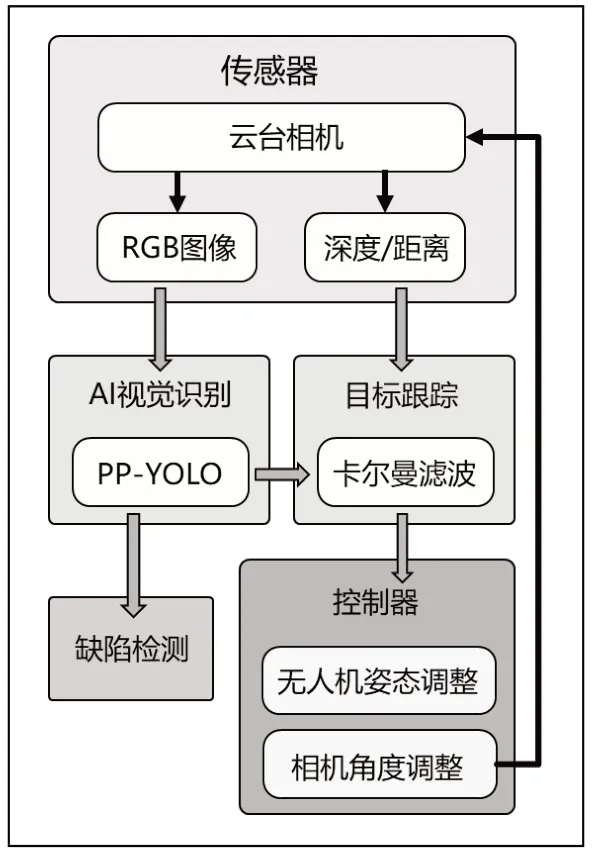
圖1 無人機智能計算模塊的整體框架
■2.1 AI 視覺識別模塊
采 用PP-YOLO作為AI 視覺識別的核心算法,完成無人機飛行中的實時目標(biāo)檢測任務(wù)。在實時目標(biāo)檢測中,通過云臺相機視頻抽幀獲取的單張圖像作為AI視覺識別模塊的輸入,模塊中使用PPYOLO 模型生成2D邊界框來預(yù)測目標(biāo)對象的位置。PP-YOLO 沿用了YOLOv3 的One-stage 結(jié)構(gòu),其檢測器由骨干網(wǎng)、檢測頸以及用于分類和定位的檢測頭組成。
PP-YOLO 在將錨點轉(zhuǎn)換為包圍框時,進行了如下計算:
■2.2 目標(biāo)跟蹤模塊
利用2.1 節(jié)介紹的AI 視覺識別模塊輸出作為目標(biāo)跟蹤模塊的輸入,將完成坐標(biāo)變換的目標(biāo)位置信息輸入到卡爾曼濾波器,在一段時間軸上持續(xù)預(yù)測目標(biāo)的位置變化,使無人機能夠跟蹤飛行。根據(jù)云臺相機所獲取到目標(biāo)的相對位置,以及無人機傳感器所獲取到的速度信息,建立待跟蹤目標(biāo)的狀態(tài)向量
卡爾曼濾波器可以進一步被劃分為時間更新和測量更新兩個步驟,時間更新過程是指由上一時刻的狀態(tài)加上外界輸入噪聲來預(yù)測當(dāng)前狀態(tài),測量更新則是根據(jù)預(yù)測結(jié)果與觀測結(jié)果來計算不確定性因子。具體地,可以描述如下:
卡爾曼濾波器解決了目標(biāo)跟蹤中的目標(biāo)狀態(tài)估計問題,具體來說,以目標(biāo)當(dāng)前狀態(tài)作為輸入通過濾波器后可以得到目標(biāo)經(jīng)過步長后的預(yù)測狀態(tài)卡爾曼濾波過程是一個持續(xù)的迭代計算過程,這樣,本文就可以通過對識別的目標(biāo)進行持續(xù)跟蹤飛行。
■2.3 無人機輸電線路飛行巡檢流程
具體來說,飛行作業(yè)流程可以做如下描述:通過所述圖像識別單元識別所述圖像信息的畫面中心區(qū)域是否有跟隨目標(biāo);若有跟隨目標(biāo),則繼續(xù)拍攝;若沒有跟隨目標(biāo),則識別所述圖像信息的整個畫面中是否有跟隨目標(biāo),若有跟隨目標(biāo),則通過所述信息處理單元計算出相機的最優(yōu)調(diào)整策略,所述綜合控制單元將相機最優(yōu)調(diào)整策略轉(zhuǎn)化為所述云臺控制單元具體的控制指令,所述云臺控制單元接收到控制指令,調(diào)整云臺角度,直到目標(biāo)位于圖像信息畫面的中心區(qū)域;若所述圖像信息的整個畫面中沒有跟隨目標(biāo),則初始化所述云臺控制單元,重新通過所述圖像識別單元識別所述圖像信息的畫面中心區(qū)域是否有跟隨目標(biāo)。
3 “一線兩向”無人機飛行實驗
■3.1 無人機硬件平臺介紹
實驗中采用的二代飛行平臺為四旋翼主體結(jié)構(gòu),其中機身控制搭載雙實時差分定位模塊(Real-time kinematic,RTK)、視覺識別部分搭載HUAWEI Ascend 310 AI 計算芯片。無人機下方搭載使用3.5 倍光學(xué)變焦鏡頭的云臺相機,相機俯仰轉(zhuǎn)動范圍,水平轉(zhuǎn)動范圍,角度抖動量。
二代無人機飛行平臺具有航時長、平飛速度高、飛行速度穩(wěn)定、抗風(fēng)防雨能力強等性能特點,能夠很好地完成多種復(fù)雜場景下的OLDT 模式輸電線路巡檢任務(wù)。
■3.2 無人機仿線飛行實驗
仿線飛行測試路線如圖2 所示架空看那個輸電線路,無人機實際移動路線分繞桿U 字形航線和仿線飛行兩個部分,架空輸電線路桿塔掛點垂直距離13 米,左右寬6 米,桿塔間檔距300 米。飛行作業(yè)中,對云臺角度、飛行速度、變焦倍數(shù)、飛行路徑、偏航率、缺陷識別率等參數(shù)進行測試。
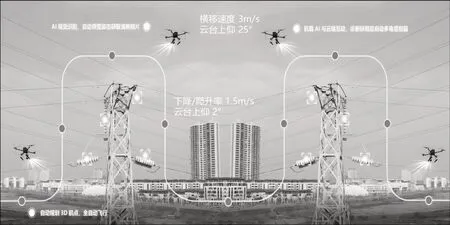
圖2 飛行測試參數(shù)及路線示意
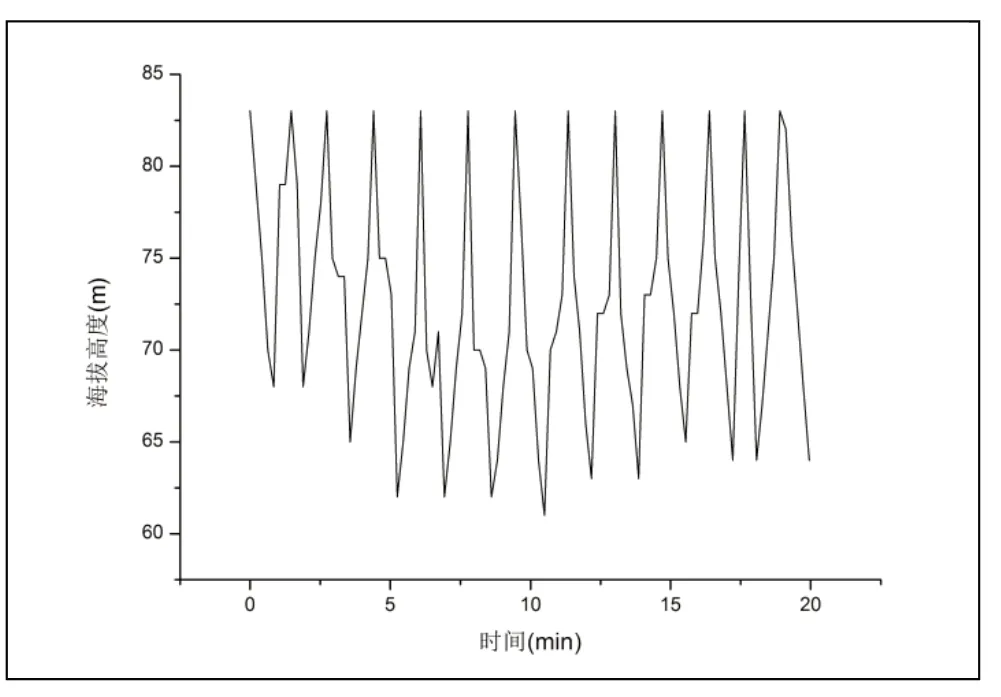
圖3 仿線飛行測試中無人機海拔高度變化趨勢
為了測試不同硬件條件下無人機自主巡檢的性能參數(shù),本文分別選取了和分辨率的云臺相機進行測試。搭載攝像頭的云臺相機擁有更高的識別精度,能夠擁有更大的繞線飛行半徑、相對更高的仿線飛行速度以及更高的缺陷識別率。
在啟動約5s 后,無人機以基本恒定的角速度進行轉(zhuǎn)向與姿態(tài)調(diào)整,約5s 后,達到目標(biāo)角度并開始跟隨導(dǎo)線進行飛行。在隨后飛行過程中,RTK 航向角基本保持恒定,角度抖動小于等于,表明本文設(shè)計的AI 視覺識別與跟蹤算法能夠很好地輔助無人機,完成架空輸電線路巡檢任務(wù)。
■3.3 缺陷檢測與桿塔建模
云臺通過對相機在繞桿U 字形航線中拍攝的6K 視頻數(shù)據(jù)進行抽幀,使用缺陷識別算法,實時監(jiān)測桿塔的銷釘缺失等缺陷。
進一步地,利用采集到的桿塔本體數(shù)據(jù),建立桿塔模型的數(shù)據(jù)庫,對桿塔模型進行分類,實現(xiàn)桿塔識別,為后續(xù)實現(xiàn)自主塔間航線規(guī)劃做足準(zhǔn)備與數(shù)據(jù)鋪墊工作。
4 結(jié)束語
本文提出了基于AI 視覺識別的“一線兩向”模式的高效率巡檢方式,并進行了相關(guān)飛行試驗,將AI 視覺算法和跟蹤算法與仿線飛行算法相結(jié)合,實現(xiàn)塔間導(dǎo)線跟隨飛行、巡檢數(shù)據(jù)的視頻采集、缺陷實時檢測等功能。
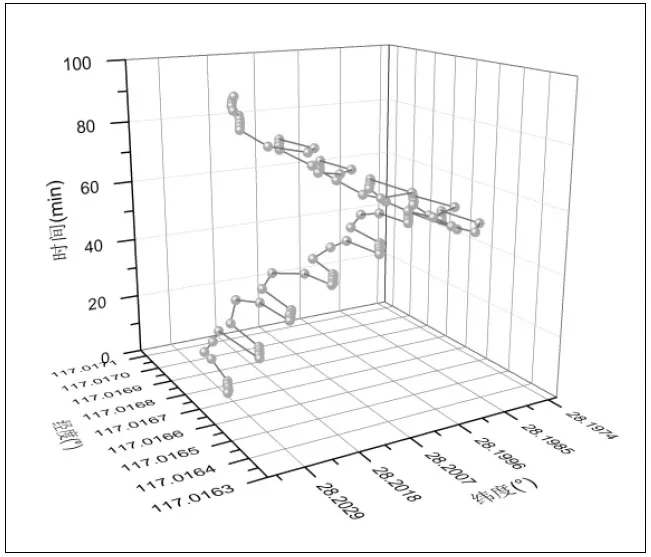
圖4 仿線飛行測試中無人機經(jīng)緯度變化趨勢
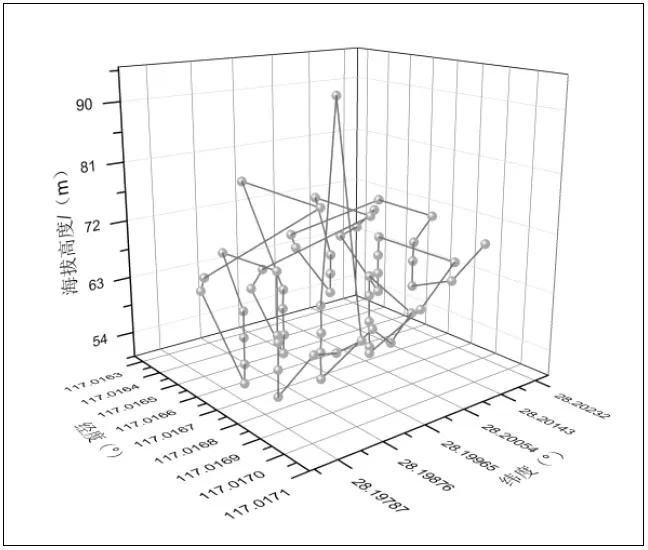
圖5 仿線飛行測試中無人機海拔高度與經(jīng)緯度變化關(guān)系
(1)本文提出了“一線兩向”的飛行模式,在一定程度上解決了“一塔多點”模式下的缺陷,在降低人工成本的同時提升了檢測精度,相比于傳統(tǒng)的仿地飛行無需先驗數(shù)據(jù),提升了巡航效率。
(2)本章基于PP-YOLO 和卡爾曼濾波算法搭建AI 視覺識別與目標(biāo)跟蹤模塊,既平衡了檢測精度和每秒傳輸幀數(shù),又具有硬件性能依賴性低、速度快、準(zhǔn)確率高、抗干擾素力強等特點。
(3)本文完成了架空輸電線路的無人機OLDT 模式飛行巡檢實驗。實驗結(jié)果表明,無人機搭載AI 視覺識別與跟蹤算法,輔以仿線飛行技術(shù)能夠準(zhǔn)確地對目標(biāo)進行跟蹤飛行,并且飛行過程中各項數(shù)值基本穩(wěn)定。
目前無人機在電力線路巡檢領(lǐng)域的應(yīng)用越發(fā)廣泛,優(yōu)化無人機巡檢模式,在電力巡檢工作中具有重要研究意義及極高應(yīng)用價值,具備在各省乃至全國推廣的意義。
猜你喜歡
測控技術(shù)(2018年11期)2018-12-07 05:49:38
測控技術(shù)(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
中國慣性技術(shù)學(xué)報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36