基于云RTK的無線電測向定位示準測試技術(shù)
2023-07-17 05:50:30唐龍
艦船電子對抗 2023年3期
唐 龍
(桂林長海發(fā)展有限責(zé)任公司,廣西 桂林 541001)
0 引 言
無線電監(jiān)測設(shè)備能夠?qū)崿F(xiàn)對無線電輻射源信號的偵察、識別、測向和定位,如何快速準確地對無線電監(jiān)測設(shè)備的測向定位性能進行測試和合理評估具有十分重要的意義[1]。對無線電監(jiān)測設(shè)備測向定位技術(shù)指標測量,通常利用全站儀或?qū)崟r動態(tài)(RTK)載波相位差分定位技術(shù)實現(xiàn)。全站儀通過人工輔助方式實現(xiàn)被測設(shè)備的方位、距離示準測量,一般是固定選擇幾個位置點后進行測試,并且進行多次位置挪動后會出現(xiàn)一定的測量誤差累積,影響設(shè)備真實性能狀態(tài)的評估;而且全站儀要求使用環(huán)境滿足一定的能見度和通視條件等因素,不能全天候、全地域地進行示準測量,示準工作主要由人工完成,自動化程度低,調(diào)試量巨大。普通電臺RTK設(shè)備的傳輸距離受到電臺功率影響[2],考慮到無線電臺體積、重量和功耗要求,普通電臺傳輸距離一般為1~5 km左右,在一些山地、丘陵等復(fù)雜地形條件下會降低普通電臺的傳輸距離,不能滿足野外長傳輸距離試驗要求。另外,傳統(tǒng)無線電監(jiān)測設(shè)備技術(shù)性能測試采用人工抽驗方式實現(xiàn),存在檢測樣本數(shù)量少和工作效率低的問題[3]。
針對上述問題,提出一種基于云RTK的多平臺通用型測向定位示準測試系統(tǒng),結(jié)合云RTK技術(shù)和小型化信號輻射源特點,充分利用移動網(wǎng)絡(luò)和云服務(wù)器實現(xiàn)RTK基準站和移動站間的信息傳輸;通過軟件自動測試技術(shù)控制示準測試系統(tǒng)應(yīng)用平臺改變方位、俯仰和距離參數(shù),控制信號輻射源設(shè)置信號參數(shù),快速方便地進行無線電監(jiān)測設(shè)備技術(shù)性能檢測。
1 云RTK工作原理及技術(shù)特點
1.1 RTK工作原理
RTK是通過實時動態(tài)處理載波相位觀測值的差分定位技術(shù),基本原理是將基準站安裝在某一坐標位置點,接收衛(wèi)星信號并采集基準站載波相位觀測值,通過無線電臺等數(shù)據(jù)通信鏈路實時發(fā)送給移動站;移動站接收衛(wèi)星信號并采集載波相位觀測值,同時通過電臺接收基準站載波相位觀測數(shù)據(jù),經(jīng)過解調(diào)處理得到基準站的載波相位觀測值;對2個測量站的載波相位觀測值進行實時差分處理,完成整周模糊度的解算,最后輸出厘米級定位精度的移動站坐標位置信息[4]。
1.2 云RTK測量技術(shù)特點
云RTK測量技術(shù)是在傳統(tǒng)RTK技術(shù)通過電臺進行信息傳輸?shù)幕A(chǔ)上,充分利用移動網(wǎng)絡(luò)實現(xiàn)RTK基準站和移動站間的信息傳輸,RTK基準站通過4G/5G網(wǎng)絡(luò)將采集到的載波相位數(shù)據(jù)發(fā)送到云服務(wù)器,RTK移動站通過4G/5G網(wǎng)絡(luò)將云服務(wù)器上的基準站載波相位數(shù)據(jù)接收下來,進行差分解算坐標[5]。
基于云RTK的多平臺通用型測向定位示準裝置主要包括北斗/GPS接收天線、通信天線、RTK基準站處理設(shè)備、RTK移動站處理設(shè)備、無線傳輸設(shè)備和顯示控制計算機。北斗/GPS接收天線、RTK基準站處理設(shè)備、RTK移動站處理設(shè)備完成設(shè)備坐標位置的差分解算;通信天線和無線傳輸設(shè)備完成RTK基準設(shè)備和移動設(shè)備到云服務(wù)器的數(shù)據(jù)傳輸;顯示控制計算機完成示準測試系統(tǒng)應(yīng)用平臺的運動控制參數(shù)設(shè)置。示準裝置原理框圖如圖1所示。

圖1 基于云RTK的測向定位示準裝置原理框圖
云RTK測量技術(shù)使用移動網(wǎng)絡(luò)和云服務(wù)器進行各設(shè)備間的數(shù)據(jù)交互,傳輸距離可以達到30~40 km左右,減少傳統(tǒng)RTK電臺因傳輸距離限制需要多次挪動位置測量的累積誤差;降低對使用環(huán)境電磁波通視條件和光學(xué)能見度等因素限制,可以適應(yīng)山地、丘陵等復(fù)雜地形條件應(yīng)用,能夠提供快速、全地域、全天候的高精度示準測量。
2 基于云RTK技術(shù)的測向定位示準測試系統(tǒng)設(shè)計與實現(xiàn)
2.1 測向定位示準測試系統(tǒng)工作原理
基于云RTK的多平臺通用型測向定位示準測試系統(tǒng)應(yīng)用場景如圖2所示,可以適用于無人機載、車載和便攜等平臺。其中無人機載平臺應(yīng)用可以滿足被測設(shè)備方位、俯仰和距離等參數(shù)的精確示準;車載平臺應(yīng)用和便攜平臺應(yīng)用可以滿足被測設(shè)備方位和距離等參數(shù)的精確示準。顯示控制計算機通過軟件自動測試技術(shù)控制示準測試系統(tǒng)應(yīng)用平臺改變方位、俯仰和距離參數(shù),按照需求控制信號輻射源設(shè)置信號參數(shù),實時讀取無線電監(jiān)測設(shè)備的工作狀態(tài)和方位、俯仰和距離測量參數(shù),對被測設(shè)備進行技術(shù)性能評估判斷,工作效率高,準確性好。

圖2 基于云RTK的測向定位示準測試應(yīng)用場景
2.2 常用坐標系及RTK測向定位結(jié)果解算
確定地面上某觀察點相對于地球的位置信息是衛(wèi)星導(dǎo)航和遙測定位計算中的基本任務(wù),通常需要建立合理的坐標系,以便準確地描述被測點與觀察點的幾何位置關(guān)系和坐標位置信息[6]。
2.2.1 常用地球坐標系介紹
在大地坐標系中,空間某觀測點P的大地坐標位置信息P(B,L,H)主要用緯度B、經(jīng)度L、高程H表示。大地緯度B表示赤道面與觀測點P處參考橢球法線PO的夾角;大地經(jīng)度L表示參考橢球起始子午面NGS與觀測點P和參考橢球自轉(zhuǎn)軸所在面NPS之間的夾角;大地高程H是觀測點P沿該點法線到橢球面的距離;原心O表示Z軸與觀測點P沿地球橢球表面的法線方向延長線的相交點。大地坐標系如圖3所示。

圖3 大地坐標系
在空間直角坐標系中,空間中某觀測點P的坐標位置信息P(x,y,z)主要用該觀測點投影在X軸、Y軸、Z軸上的長度來表示。X軸正向指向赤道與本初子午面的交點G;Y軸按照右手坐標系均與Z軸和X軸的夾角呈90°;Z軸正向指向地球橢球的北極點N;原心O表示地球橢球的中心。空間直角坐標系如圖4所示。
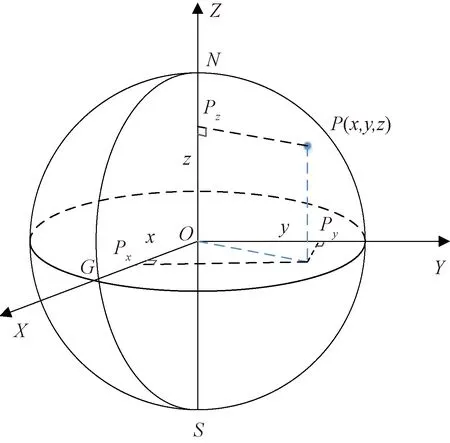
圖4 空間直角坐標系
在東北天坐標系中,空間中某觀測點P的坐標位置信息P(E,N,U)主要用東向E、北向N、天向U來表示。x軸(東向E)與地球長半軸重合;y軸(北向N)與地球短半軸重合;z軸(天向U)與地球法線重合,向上為正;原點O表示以站心(如北斗/GPS接收天線中心)為坐標系中心,主要用于測量以觀察者為中心的其他物體坐標位置信息和運動規(guī)律,東北天坐標系如圖5所示。

圖5 東北天坐標系
2.2.2 RTK測向定位結(jié)果解算算法
在衛(wèi)星導(dǎo)航和遙測定位計算中,需要對空間中同一觀測點在不同坐標系之間的位置信息進行坐標轉(zhuǎn)換,坐標轉(zhuǎn)換的精度直接決定著目標定位的準確性和精度。根據(jù)常用坐標系的幾何位置關(guān)系,空間直角坐標系、大地坐標系和東北天坐標系之間的坐標轉(zhuǎn)換計算過程主要包括以下步驟[7]。
首先,根據(jù)大地坐標系和空間直角坐標系之間的幾何位置關(guān)系,需要將RTK基準站記錄的大地坐標位置信息(緯度Bz,經(jīng)度Lz,高程Hz)轉(zhuǎn)換為空間直角坐標信息(xz,yz,zz),轉(zhuǎn)換數(shù)學(xué)關(guān)系式為:
(1)
將RTK移動站記錄的大地坐標位置信息 (緯度Bc,經(jīng)度Lc,高程Hc)轉(zhuǎn)化為空間直角坐標信息(xc,yc,zc),轉(zhuǎn)換數(shù)學(xué)關(guān)系式為:
(2)

然后,將RTK移動站由空間直角坐標系轉(zhuǎn)換為以RTK基準站為原點的東北天坐標信息(E,N,U),轉(zhuǎn)換數(shù)學(xué)關(guān)系式為:
(3)
最后,根據(jù)東北天坐標信息(E,N,U)計算RTK基準站與移動站之間的距離R、方位角A和俯仰角E,獲得設(shè)置的距離、方位和俯仰等示準參數(shù)。計算數(shù)學(xué)關(guān)系式為:
(4)
A=arctan(E/N)
(5)
(6)
2.3 測向定位設(shè)備示準及自動測試技術(shù)
無線電監(jiān)測設(shè)備測向定位性能是設(shè)備主要功能,如何快速、方便地對無線電監(jiān)測設(shè)備進行性能測試和合理評估是需要重點考慮的問題。文獻[1]介紹了一種適用于機載電子偵察設(shè)備的自動測試系統(tǒng),但是需要通過伺服轉(zhuǎn)臺轉(zhuǎn)動角度才能對電子偵察設(shè)備的測向能力進行定量分析。針對部分固定站無線電監(jiān)測設(shè)備無伺服轉(zhuǎn)動功能或者信號輻射源位置遠距離變化的問題,測向定位示準測試系統(tǒng)將云RTK技術(shù)與自動測試技術(shù)相結(jié)合,利用示準測試系統(tǒng)應(yīng)用平臺完成測試所需的方位、俯仰和距離參數(shù)示準,接收被測設(shè)備上報測量參數(shù)并進行數(shù)據(jù)分析和性能評估。測向定位示準測試系統(tǒng)工作流程如圖6所示。
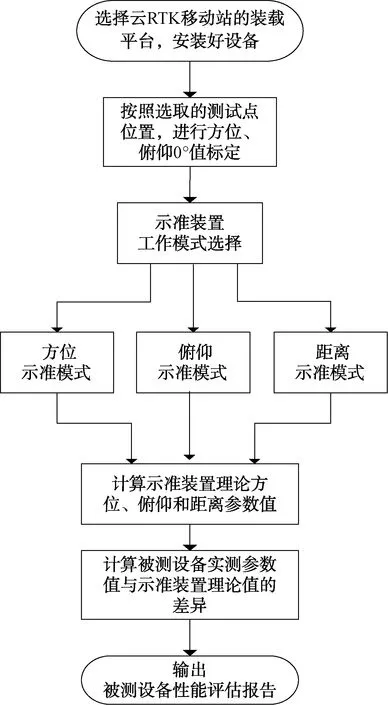
圖6 測向定位示準測試流程框圖
(1) 選擇云RTK移動站的應(yīng)用平臺,安裝好測向定位示準測試系統(tǒng)和被測無線電監(jiān)測設(shè)備;
(2) 按照選取的測試點位置,進行被測無線電監(jiān)測設(shè)備方位、俯仰面的零值(0°)標定;
(3) 根據(jù)指令,選擇示準測試系統(tǒng)工作模式,主要包括方位示準模式、俯仰示準模式和距離示準模式;
(4) 通過記錄的被測無線電監(jiān)測設(shè)備位置坐標和RTK移動站的實時位置坐標,計算出測向定位示準測試系統(tǒng)理論方位、俯仰和距離參數(shù)值;
(5) 將被測無線電監(jiān)測設(shè)備實際測試方位、俯仰和距離參數(shù)值送到顯示控制計算機,通過軟件自動測試系統(tǒng)計算出設(shè)備實測值與示準測試系統(tǒng)理論值的差異,輸出性能評估報告。
3 系統(tǒng)示準測試流程及數(shù)據(jù)處理
3.1 零值標定流程
(1) 通過云服務(wù)器配套應(yīng)用軟件,設(shè)置好相關(guān)網(wǎng)絡(luò)系統(tǒng)端口參數(shù),選擇使用的SIM卡對應(yīng)運營商接入點名稱,實現(xiàn)RTK設(shè)備、測向定位示準測試系統(tǒng)和顯示控制計算機的移動互聯(lián);
(2) 通過被測無線電監(jiān)測設(shè)備的正北角值和方位機械0°位置,結(jié)合云RTK設(shè)備進行方位面的0°值標定;
(3) 通過被測無線電監(jiān)測設(shè)備的正北角值和俯仰機械0°位置,結(jié)合云RTK設(shè)備進行俯仰面的0°值標定。
3.2 示準模式工作流程
示準測試系統(tǒng)工作模式主要包括方位示準模式、俯仰示準模式和距離示準模式,示準模式主要工作流程如下:
(1) 根據(jù)測試示準參數(shù)需求,分時選擇對應(yīng)的工作模式為方位/俯仰/距離示準模式;
(2) 分時設(shè)置下發(fā)測量的方位/俯仰/距離示準范圍、駐留時間等參數(shù);
(3) 分時制定方位/俯仰/距離示準測量計劃,主要設(shè)置參數(shù)包含方位/俯仰/距離起止范圍、方位/俯仰/距離步進、方位/俯仰/距離駐留時間等;
(4) 制定信號輻射源測量計劃,主要設(shè)置參數(shù)包含信號輻射源起止頻率、頻率掃描步進、頻率駐留時間等;
(5) 分時控制應(yīng)用平臺按照方位/俯仰/距離示準設(shè)置路線進行運動,信號輻射源按照信號源設(shè)置參數(shù)通過輻射天線發(fā)射信號;
(6) 被測無線電監(jiān)測設(shè)備接收輻射源信號,分時測量并記錄信號頻率、方位/俯仰/距離參數(shù)值。
3.3 數(shù)據(jù)處理
根據(jù)被測無線電監(jiān)測設(shè)備上報的偵測結(jié)果參數(shù),自動測試系統(tǒng)按照設(shè)備設(shè)計技術(shù)指標要求自動完成被測設(shè)備的數(shù)據(jù)分析和性能判定,輸出性能評估報告。計算被測設(shè)備性能參數(shù)理論值與實測值的誤差方法主要包括:
(1) 示準測試系統(tǒng)理論方位值為θA,被測設(shè)備方位實測值為θAT,方位選取點為M個,每個方位點選取頻率點為N個,則被測設(shè)備方位測量誤差為:
(7)
(2) 示準測試系統(tǒng)理論俯仰值為θE,被測設(shè)備俯仰實測值為θET,俯仰選取點為M個,每個俯仰點選取頻率點為N個,則被測設(shè)備俯仰測量誤差為:
(8)
(3) 示準測試系統(tǒng)理論距離值為D,被測設(shè)備俯仰實測值為DT,距離選取點為M個,每個距離點選取頻率點為N個,則被測設(shè)備距離測量誤差為:
(9)
4 結(jié)束語
通過結(jié)合云RTK技術(shù)和小型化信號輻射源特點,充分利用4G/5G移動網(wǎng)絡(luò)和云服務(wù)器進行云RTK設(shè)備和測向定位示準測試系統(tǒng)等設(shè)備間的數(shù)據(jù)交互,可以快速、方便地進行示準參數(shù)的設(shè)置,解決傳統(tǒng)方位、俯仰和距離基準測量技術(shù)調(diào)試工作量大和使用環(huán)境限制的問題;通過軟件自動測試技術(shù)根據(jù)測試需求控制示準測試系統(tǒng)應(yīng)用平臺設(shè)置示準參數(shù),實時讀取無線電監(jiān)測設(shè)備的工作狀態(tài)和方位、俯仰和距離測量參數(shù),被測設(shè)備技術(shù)性能檢測樣本數(shù)量多,自動化程度高,測試準確性好,能夠滿足車載、機載、便攜等多型平臺的示準測試應(yīng)用。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
經(jīng)濟技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00