雷達極化對角加載檢測器的最優(yōu)權重算法
2023-06-26 07:26:04曹運運楊子淵劉維建
雷達科學與技術 2023年2期
曹運運,楊子淵,劉維建,劉 濤
(1.海軍工程大學電子工程學院,湖北武漢430033;2.空軍預警學院,湖北武漢 430019)
0 引 言
合成孔徑雷達(Synthetic Aperture Radar,SAR)因其可全天時、全天候工作及廣域大刈寬等優(yōu)點,在海洋遙感領域發(fā)揮出重要作用。目前復雜環(huán)境下的艦船目標檢測仍是SAR 海洋遙感領域的難點問題,具體表現(xiàn)在近岸目標檢測、密集目標檢測和弱小目標檢測等方面。極化合成孔徑雷達(Polarimetric SAR,PolSAR)在單通道SAR 的基礎上增加了更多極化通道,能夠更完整地保留目標電磁散射特性,極大提升了目標檢測和識別方面的性能[1],文獻[2]展現(xiàn)了極化特征在目標恒虛警檢測中的實際效果。文獻[3]對目前極化SAR 圖像艦船目標檢測方法進行了詳細綜述,常用的極化檢測器可分為特征融合艦船目標檢測方法、慢動艦船目標檢測方法等。其中特征融合檢測方法中的極化最優(yōu)化技術利用不同極化通道信息,遵循一定的優(yōu)化目標函數(shù),對PolSAR 圖像進行特征融合處理,具有檢測性能良好、物理可解釋性強等優(yōu)點,在極化檢測中占有重要地位。因此本文聚焦該研究方向,展開基于最優(yōu)化技術的極化檢測器的改進和提升工作。基于優(yōu)化技術的極化檢測器主要分為目標特性已知時的和目標特性未知時的兩類檢測器。
在目標特性已知的極化最優(yōu)化檢測器方面:1988年Boerner 等人基于最大信噪比準則提出了極化匹配濾波器(Polarimetric Matched Filter,PMF)。1989年,Novak 等人從似然比檢驗角度提出了最優(yōu)極化檢測器(Optimal Polarimetric Detector,OPD),該方法達到了極化探測器的理論上限(需要目標的先驗信息)[3]。楊健等以信噪比最大為優(yōu)化目標,提出了極化對比增強(Optimization of Polarimetric Contrast Enhancement,OPCE)方法,取得較好的效果[4]。楊健等隨后將散射機理融于OPCE 形成其廣義方法(GOPCE),提升了目標檢測效果[5-6]。楊棟文等提出一種基于最小雜信比子空間(Minimal Clutter to Signal Ratio)的極化對比增強方法并應用到艦船檢測領域,發(fā)現(xiàn)在某些維數(shù)的子空間上其艦船目標檢測性能優(yōu)于傳統(tǒng)的極化對比增強方法[7]。作者以信雜比和雜波起伏度的比值最大為優(yōu)化目標提出了極化檢測優(yōu)化濾波器(Polarimetric Detection Optimization Filter,PDOF),并證明在復雜環(huán)境下該方法是目標先驗信息已知時的最優(yōu)極化檢測器[8]。
在目標特性未知的極化最優(yōu)化檢測器方面:1982年Boerner 提出的能量檢測器(SPAN)利用了極化回波的所有能量[9]。采用單位矩陣與SPAN的乘積代替OPD 中的目標協(xié)方差矩陣,即可得到單位似然比(Identity Likelihood Ratio Test,ILRT)檢測器[10]。通過將極化散射矢量進行組合可形成功率最大合成檢測器(PMS)[9-10]。1990年,Novak和Burl 提出了極化白化濾波器(Polarimetric Whitening Filter,PWF)[11],與上述其他方法相比,PWF的檢測性能與OPD 最為接近[10-11]。Marino 提出以雜波能量最小為準則的極化凹口濾波器(Polarimetric Notch Filter,PNF)[12]。高貴等將PNF應用到了高海況情形、混合極化情形和干涉情形,均取得了較好效果[13]。2020年,劉濤等考慮電磁散射能量的現(xiàn)實物理意義,修改了PNF 表達式,并對其命名為新PNF(New PNF,NPNF),取得了較原PNF 更好的檢測性能[14]。目前大部分場景下PNF 的性能仍低于PWF[15]。
考慮到將上述檢測器進行融合有望提高目標檢測性能,劉濤等利用改進的線性判別方法(Modified Linear Discriminant Analysis,MLDA)將上述檢測器進行融合,發(fā)現(xiàn)PWF 與PDOF 的組合基本能夠達到多種極化檢測器融合的最佳效果,并因此提出了極化對角加載檢測器(Diagonal Loading Detector,DLD)[16]。遺憾的是,而這二者進行組合的最優(yōu)權重無法獲得。因此本文的研究目的就是尋找求解PWF 和PDOF 線性組合的最優(yōu)加權系數(shù)算法。第1節(jié)給出了DLD的數(shù)學模型及其約束條件。第2 節(jié)分別從3 個思路給出了基于ROC 曲線下面積(MAUC)、Fisher 線性判別準則(LDA)和口袋感知機學習算法(Pocket Perceptron Learning Algorithm,PPLA)的求解方法。另外針對基于MAUC的求解方法,結合LDA 設計出其快速實現(xiàn)算法。第3節(jié)利用仿真和實測數(shù)據(jù)分析了樣本數(shù)目、雜波模型對檢測性能的影響,并比較了計算速度。第4節(jié)給出了結論。
1 DLD檢測器的數(shù)學模型
Novak 等人提出的PWF 物理機理是使雜波的起伏度最小,其表達式為[11]
式中:tr(·)是矩陣的跡,L是等效視數(shù),i表示統(tǒng)計平均中第i個像素;s是極化散射矢量,si即為第i個像素的極化散射矢量,服從多維復高斯分布;C=是多視極化協(xié)方差矩陣;ΣC=E(C)是雜波極化協(xié)方差矩陣,E(·)表示數(shù)學期望,Σ-1C表示雜波極化協(xié)方差矩陣的逆。
PDOF 在復雜雜波背景和目標先驗信息已知情況下的檢測性能優(yōu)于OPD,其表達式為[8]
式中G=Σ-1CΣTΣ-1C,ΣT為目標極化協(xié)方差矩陣。
現(xiàn)構造PWF與PDOF的線性組合模型為
其中,P矩陣為
式中:Id×d為d維單位矩陣,在單像素檢測技術中,d一般為3,與極化協(xié)方差矩陣的維數(shù)相同;Λ為非負實對角矩陣且滿足,U為酉矩陣。
因此該問題就轉化為在滿足α2+β2=1 的約束條件下尋找最優(yōu)的α和β使得聯(lián)合極化檢測器檢測量zL=tr(Σ-1/2CU(αId×d+βΛ)UHΣ-1/2CC) 具備最佳的檢測性能。當然兩個系數(shù)不進行歸一化約束也可以,不影響最后的極化檢測性能。
極化檢測器的性能通常以受試者工作特征(Receiver Operating Characteristic)曲線來體現(xiàn),其橫坐標軸為虛警概率(Probability of False Alarm,PFA),縱坐標軸為檢測概率(Probability of Detection,PD)。ROC曲線構成的曲線下面積(Area Under Curve,AUC)可以量化其檢測性能[8]。AUC 的取值范圍為[0,1],其表達式為
式中R(Pfa)表示ROC曲線,Pfa表示虛警概率變量。
然而,在實際工作中的雷達往往需要較低的PFA,當PFA 提高時,PD 接近于1,導致各檢測器的AUC 較為接近。為了突出低虛警概率前提的重要性以及降低高信噪比導致AUC 飽和的影響,結合對數(shù)坐標系的優(yōu)勢,本文提出采取修正AUC(Modified AUC,MAUC)作為評價指標:
則最終的優(yōu)化數(shù)學模型為
工作的難點是在MAUC 沒有解析表達式的情形下求取兩種檢測器的最優(yōu)線性加權系數(shù)。
2 線性模型求解方法
首先簡化優(yōu)化準則,從基于Fisher準則的LDA線性判別角度出發(fā),通過最大化目標和雜波的類間散度并最小化它們的類內(nèi)散度,得到近似最優(yōu)線性權重。然后提出以曲線下面積最大為優(yōu)化目標、基于數(shù)據(jù)利用曲線下面積(MAUC)的方法來求解式(7)中的優(yōu)化模型。為了加快MAUC 參數(shù)搜索算法的求解速度,提出以LDA 解算結果為初值的快速參數(shù)搜索方法。最后,從二分類的角度出發(fā),提出將PWF 和PDOF 作為兩個特征,以最小分類錯誤為準則,利用PPLA 求取權重。3 種求解方法的關系圖如圖1所示。

圖1 線性模型求解方法關系圖
2.1 基于LDA的求解方法
在求解線性組合加權系數(shù)中,LDA 是一種比較常用的機器學習方法,因此我們打算首先簡化優(yōu)化準則,利用LDA 方法初步求取其線性組合系數(shù)。當然此時的Fisher優(yōu)化準則和式(7)不完全一樣,但計算簡單,預期能得到不錯的結果。基于LDA 的線性組合優(yōu)化本質上是比值問題[6],其經(jīng)典表達式為
式中,z=[zPWF,zPDOF]T為PWF 和PDOF 輸出組成的高維Fisher 矢量,zT為目標Fisher 矢量,zC為雜波Fisher 矢量,x=[α,β]T為線性組合權重系數(shù),Var(·)表示變異系數(shù),即均值與標準差的商,‖·‖為2 范數(shù)。式(8)的物理含義是最小化雜波與樣本的類內(nèi)距離并最大化類間距離,將式(8)整理可得到
式中,RT和RC為Fisher 矢量所對應的特征協(xié)方差矩陣,μC和μT分別為雜波和目標特征Fisher 矢量的均值。利用廣義特征值分解定理可得其最優(yōu)加權系數(shù)為
式中,λk,fk(k=1,2)為矩陣(RC-μCμTC+RT-μTμTT)-1(RT-RC)的特征值和特征矢量,其中最大特征值所對應的特征矢量就是線性最優(yōu)加權系數(shù)。
2.2 基于MAUC的求解方法
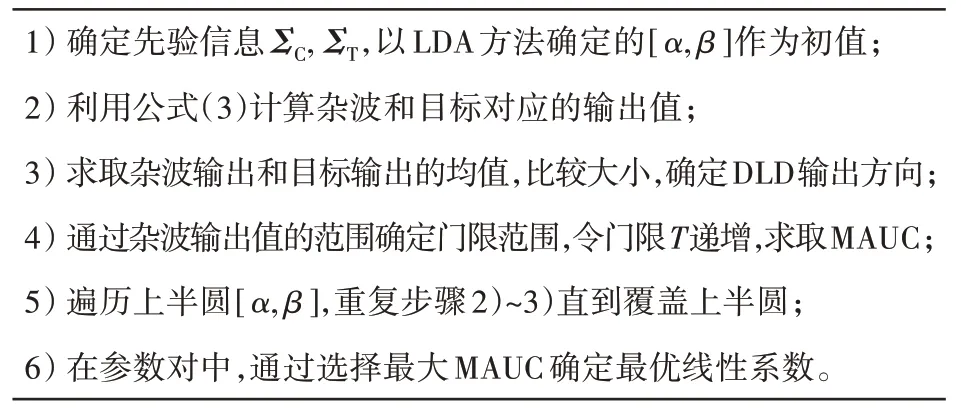
針對復雜海況,遍歷參數(shù)[α,β],構造聯(lián)合濾波矩陣P,計算其輸出值,并確定門限范圍即可計算MAUC。具體算法流程如算法1 所示。這種方法可適用于任何濾波矩陣。

算法1 基于MAUC的DLD線性求解算法
該算法的實現(xiàn)依托訓練樣本且遍歷全部參數(shù),耗時較長。由于α2+β2=1相當于圍繞單位圓周進行搜索,為了提升速度可利用對稱性結合正負定判決來確定DLD 輸出的正負方向,可將搜索范圍進一步限定在β>0 的上半圓。同時,將LDA所得結果作為該算法初值,可以進一步減少搜索時間。基于MAUC 的DLD 線性求解快速算法如算法2所示。
算法2 基于MAUC的DLD線性求解快速算法
2.3 基于PPLA的求解方法
Rosenblatt提出的感知機是一種簡單的二元分類模型[17]。但是感知機算法有一個強前提條件—數(shù)據(jù)必須是線性可分的。這意味著,如果我們無法保證樣本是線性可分的,那么根據(jù)感知機算法執(zhí)行的計算機程序可能會永遠找不到合適的劃分邊界,陷入無限迭代之中,無法收斂。由于其無法解決線性不可分問題,因此一度遇冷。為了解決這個問題,Stephen 在文獻中提出了口袋感知機算法PPLA[17]。其原理是在求解超平面的過程中,保存當前的最優(yōu)解,當超過迭代次數(shù)后,算法輸出保存的最優(yōu)解。“口袋”中就始終擁有目前我們所見到的最優(yōu)的劃分平面,這就是“口袋算法”。值得注意的是,為了防止無限重復,我們必須預先規(guī)定一個迭代次數(shù),當?shù)螖?shù)超過設定值時,算法將會停止運行。因此迭代次數(shù)和初值對最優(yōu)解的影響較大。將PWF 和PDOF 作為樣本的兩個特征,構造2×1 的感知機,其示意圖如圖2所示。由于偏置為一常數(shù),從檢測角度而言不影響性能,因此記錄PWF 和PDOF 的權重并歸一化,即可由PPLA 得到[α,β]。

圖2 基于PPLA的DLD線性權重求解
3 實驗驗證
3.1 實驗流程設計
實驗流程設計如圖3所示。主要分為聯(lián)合極化檢測器的構建和PolSAR圖像數(shù)據(jù)驗證性能評估兩方面。平行四邊形分別表示輸入和輸出。帶有灰色背景的矩形實框表示需要執(zhí)行和處理,矩形虛框表示并行可選事項。鉆石表示求解參數(shù)的確定。實驗的核心在于兩種極化檢測器線性組合最優(yōu)系數(shù)的求解。實驗框架基本流程是通過粗選擇(訓練樣本)估計目標和雜波的極化協(xié)方差矩陣,然后通過最有權重求解方法加權系數(shù),最后用圖像數(shù)據(jù)(測試樣本)驗證方法的有效性。

圖3 DLD實驗驗證流程
3.2 PolSAR數(shù)據(jù)集描述
實驗采取兩個PolSAR數(shù)據(jù)集對所構建的DLD進行驗證。第一個PolSAR數(shù)據(jù)集由加拿大全極化星載RADARSAT-2(RS-2)于2013年11月在加拿大北海地區(qū)的觀測得出[18]。其數(shù)據(jù)格式為單視復(Single Look Complex,SLC)數(shù)據(jù),波段為C波段(中心頻率5.4 GHz),該圖像方位向分辨率為7.6 m,距離向分辨率為5.2 m,入射角約為32°。艦船的實際位置信息由船舶自動識別系統(tǒng)(Automatic Identification System,AIS)獲取。如圖4所示,圖像中有11艘艦船[18]。圖中圓形邊框表示在單極化通道中難以檢測的目標。方框表示在單極化圖像中能以正常檢測的目標[18]。

圖4 RadarSat 2數(shù)據(jù)中的北海區(qū)域
另一個極化SAR 數(shù)據(jù)集由NASA/JPL Airborne SAR(AIRSAR)在日本的Kojimawan 地區(qū)以L 波段觀測得出[18]。該全極化數(shù)據(jù)獲取于2000年10月。其距離視數(shù)為1,方位視數(shù)為9。該圖像方位分辨為4 m,距離分辨率為3 m,在這個場景中有22艘船,如圖5所示。其詳細信息可以在https://vertex.daac.asf.alaska.edu/中查看[18]。

圖5 AIRSAR數(shù)據(jù)中的Kojimawan區(qū)域
這兩個數(shù)據(jù)集的海況均可以通過C 波段交叉極化進行反演[19]:RS-2北海的海面風速約為16 m/s,Kojimawan 的海面風速約為12.5 m/s,該兩景圖像均為中高海況,檢測弱小艦船目標存在一定難度,適用于本文實驗。同時為保證實驗的有效性和標準性,本實驗硬件計算平臺統(tǒng)一采用Intel Core i7-9750H 處理器,NVIDIA GeForce GTX 1650 4G 顯卡,24G 內(nèi)存,軟件平臺是Windows 10 系統(tǒng),Matlab2021。
3.3 仿真實驗驗證
仿真部分通過對來自RS-2 的實測PolSAR 數(shù)據(jù)中大面積純海域進行統(tǒng)計平均,提取得到雜波協(xié)方差矩陣,以此為統(tǒng)計基礎仿真Wishart 分布。在復雜海況下雜波協(xié)方差矩陣偏離Wishart 分布。多變量乘積模型可以用于描述復雜海雜波的統(tǒng)計特性[20-21],如K-Wishart 和g0-Wishart 模型。至于海面艦船目標,通常采用g0-Wishart 模型進行描述(紋理變量服從歸一化逆Gamma 分布,相干斑服從Wishart分布)[18,20]。在本仿真中,對雜波而言,KWishart 模型的形狀參數(shù)為4,g0-Wishart 模型的形狀參數(shù)為10;對艦船而言g0-Wishart 模型的形狀參數(shù)為2。信雜比(Target to Clutter Ratio)是目標檢測中的重要參數(shù),TCR定義如下:
式中,tr(ΣT-ΣC)表示目標功率,tr(ΣC)表示雜波功率。為仿真低信噪比復雜雜波情況下的弱小目標檢測,仿真實驗部分TCR設為0.5。
為探究不同雜波和目標模型中各求解方法所求DLD 參數(shù)的檢測性能,對雜波K-Wishart分布-目標g0-Wishart分布(CKTG)以及雜波g0-Wishart分布-目標g0-Wishart 分布(CGTG),兩種情形進行了分析。設定訓練樣本數(shù)量為5 000,測試樣本數(shù)量為100 000。為了方便與其他極化檢測器進行比較,同時給出了PWF、PDOF、OPD和PNF的ROC曲線。圖6給出了CKTG情形下的參數(shù)搜索情況和各檢測器的ROC曲線。求解所得線性組合參數(shù)可見表1。
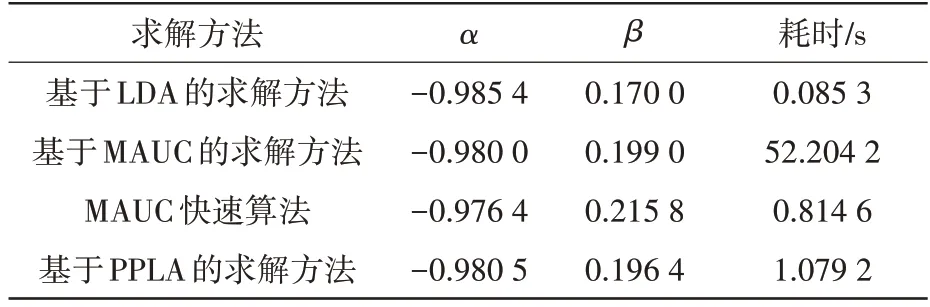
表1 各求解方法所得參數(shù)及耗時(CKTG)
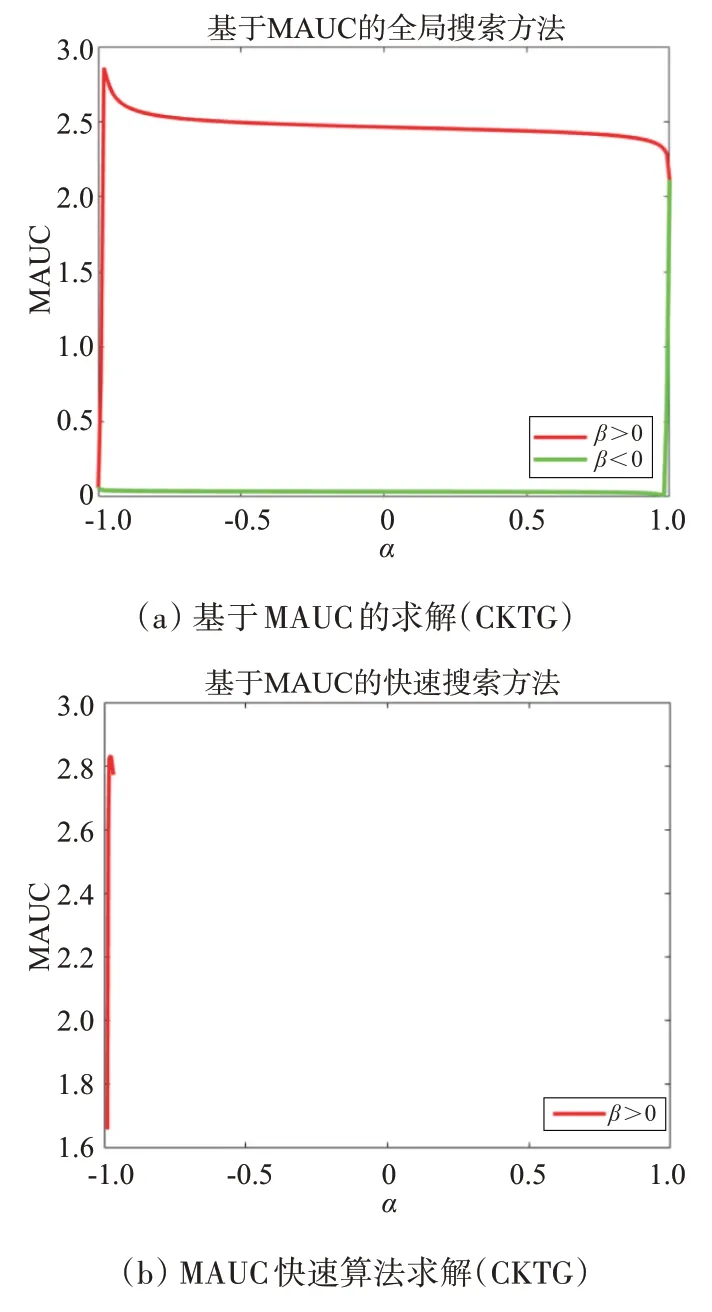
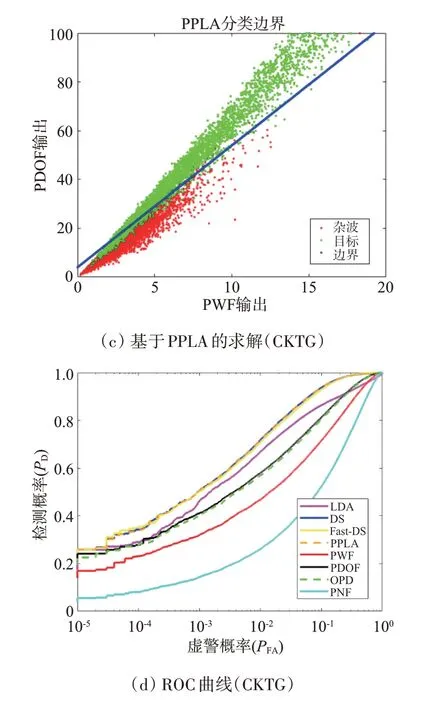
圖6 CKTG情形下參數(shù)搜索情況及各檢測器ROC曲線
圖6(a)、(b)展示了基于MAUC 的求解方法及其快速算法的搜索情況。結合表1可知,MAUC 求解方法遍歷[α,β]全局空間,其耗時較久,但能獲取全部參數(shù)對應的檢測性能;MAUC 快速算法以LDA 為初值,極大減小了搜索耗時,但如果LDA 的初值并不理想,有可能無法收斂到MAUC 的求解結果。圖6(c)展示了PPLA 所求的二維邊界。基于PPLA 的求解算法直接以PWF 和PDOF 的輸出為二維特征在利用樣本進行學習,其耗時與快速搜索算法接近,但沒有陷入局部最優(yōu)的風險。
觀察圖6(d),可發(fā)現(xiàn)在檢測性能方面基于MAUC 的求解方法(全局搜索)≈MAUC 快速算法≈PPLA 算法>基于LDA 的線性求解方法>PDOF>OPD>PWF>PNF。圖6及表1說明復雜海況下DLD具有明顯良好的檢測性能。CGTG情況與CKTG相似,為節(jié)省篇幅不再羅列。
3.4 實測數(shù)據(jù)驗證
3.4.1 RS-2場景實驗
該北海區(qū)域PolSAR 圖像信雜比為31.912 4。由于先驗信息目標和雜波協(xié)方差矩陣已知,利用艦船真實信息(GroundTruth),在大量雜波像素和一定量的目標像素中,隨機選取目標像素數(shù)80%的數(shù)量作為目標和雜波樣本,對DLD 進行參數(shù)求解,所得參數(shù)及相關指標如表2所示。
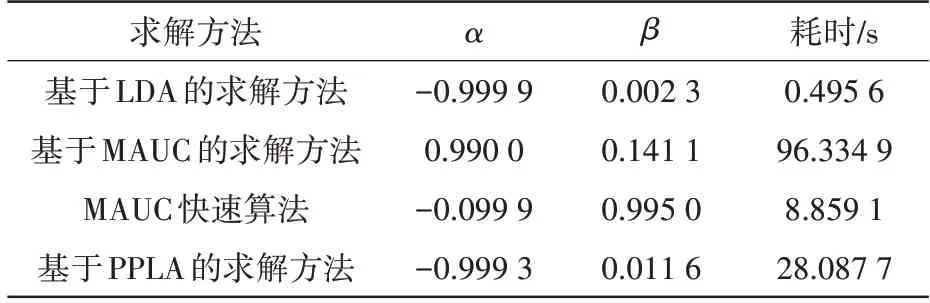
表2 各求解方法所得參數(shù)及耗時(RS-2場景)
各求解方法對應的搜索情況以及不同極化檢測器的檢測結果如圖7所示。

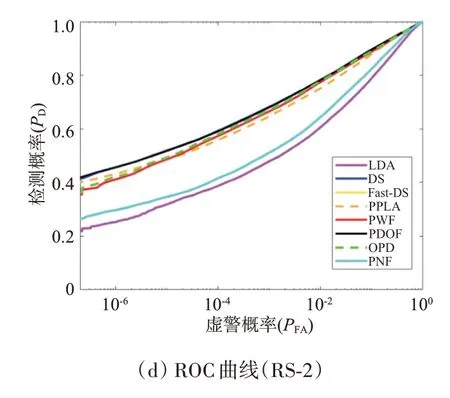
圖7 RS-2場景參數(shù)搜索情況及各檢測器ROC曲線
由于該場景雜波服從Wishart 分布[8]且信噪比較高,導致公式(4)中Λ遠大于Id×d,因此圖7(a)中的MAUC 較為平穩(wěn)。觀察圖7(d),可發(fā)現(xiàn)MAUC、Fast-MAUC 求解方法及和PDOF 幾乎重疊,OPD 優(yōu)于PWF,PWF 優(yōu)于PPLA,說明在實際系統(tǒng)中,對線性不可分問題,在樣本有限且不均衡時,感知機的性能受限。LDA的性能最差,這是因為雜波服從Wishart分布時,OPD和PWF性能極優(yōu),在有限樣本下,LDA的性能上限不會超過PWF和PDOF。仔細觀察圖7(d)可發(fā)現(xiàn)利用MAUC求解所得DLD略優(yōu)于PDOF。
3.4.2 AIRSARS場景實驗
實驗采用的AIRSAR-Kojimawan B 區(qū)圖像信雜比為131.23,利用本文所提方法對DLD 進行參數(shù)求解,所得參數(shù)及相關指標如表3所示。

表3 各求解方法所得參數(shù)及耗時(AIRSAR)
各求解方法對應的搜索情況以及不同極化檢測器的檢測結果如圖8所示。
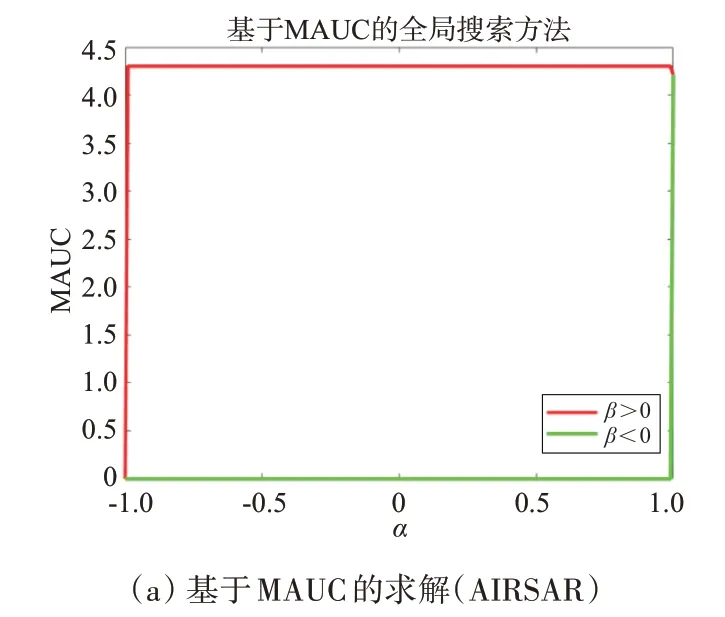
圖8 AIRSAR場景參數(shù)搜索情況及各檢測器ROC曲線
由于該場景相比于RS-2雜波環(huán)境服從K-Wishart 分布[8],在該場景下基于數(shù)據(jù)求解所得的DLD在檢測性能上的提升更加明顯。
4 結束語
本文重新構建了極化對角加載檢測器的基本模型,在此基礎上分別從準則簡化、參數(shù)遍歷和數(shù)據(jù)分類3 個路徑提出基于Fisher 線性判別分析(LDA)、MAUC 準則及口袋感知機學習算法(PPLA)的3 種求解方法,得到PWF 和PDOF 的最優(yōu)組合系數(shù)。經(jīng)仿真和實測實驗證明,在復雜海況環(huán)境下,DLD 具有優(yōu)于PDOF 和PWF 的檢測性能。在3種求解方法中,基于線性判別LDA的線性求解方法速度最快,但性能最差。基于MAUC 準則的線性求解方法性能最好,具有較強的魯棒性,但耗時最長,以LDA 為初值的快速MAUC 方法可以有效解決耗時問題。基于PPLA 的方法性能與基于數(shù)據(jù)搜索的方法相當,耗時不如以LDA 為初值的快速搜索方法。后續(xù)將拓展機器學習算法,研究神經(jīng)網(wǎng)絡模型對極化信息挖掘的檢測性能提升程度。
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
