分心駕駛事故場景研究
2023-06-23 04:07:16陳哲多何宇桐
汽車技術 2023年6期
陳哲多 何宇桐
(1.同濟大學,上海 201804;2.上海聯合道路交通安全科學研究中心,上海 201804)
主題詞:交通事故 分心駕駛 場景 聚類分析 事故特征
1 前言
科學完善的場景是智能駕駛汽車評價體系的基礎,其中,危險工況場景是驗證汽車避撞能力的必要場景,而真實道路環境下的事故信息是危險工況場景的關鍵數據來源。美國國家公路交通安全管理局(National Highway Traffic Safety Administration,NHTSA)的數據顯示,25%~30%的交通事故由分心駕駛引起[1],駕駛人在分心狀態下不能集中注意力且環境感知力下降,無法對道路上的危險信息進行有效辨識,導致事故風險概率增加。目前,基于國內事故數據的場景研究多以自動駕駛的安全測試需求為出發點,考慮不同的場景參與方進行場景構建[2-5]。然而,以事故原因為出發點的針對性場景研究對主動安全系統的驗證同樣具有重要的應用價值。
針對分心駕駛,部分學者探究了其與交通環境之間的關聯性。Robert[6]等研究了簡單和復雜道路環境下駕駛人分心駕駛的表現,結果表明,在復雜道路環境下更容易使駕駛人分心,駕駛人對危險的反應時間也相對較長;Kountouriotis[7]等發現道路曲率和其他車輛的存在均會對駕駛人產生不同程度的影響;Chen[8]等利用美國交通事故數據分析不同交通環境對分心駕駛事故的影響,發現城市化道路環境下分心駕駛事故發生率明顯高于非分心駕駛事故。因此,不同的交通環境會在一定程度上對駕駛人分心產生影響,但目前相關研究成果尚少,且大部分研究通過設計具備不同環境復雜度的場景開展模擬試驗,未能充分考慮環境因素的影響,很少有學者利用真實事故數據進行危險場景的研究。雖然駕駛模擬器可以根據不同研究對象模擬各種道路環境,但真實的交通事故環境往往比模擬環境更為復雜。
因此,本文對交通事故深度調查數據中的分心駕駛事故進行篩選,基于道路交通環境和事故參與方的運動狀態確定特征參數,通過二階聚類分析方法提取不同事故類型下的分心駕駛典型場景并進行特征分析,得到能夠體現分心駕駛事故特征的核心場景,使主動安全技術的驗證與評價更具針對性。
2 分心駕駛事故的數據來源
2.1 分心駕駛事故的定義
對于分心駕駛的定義,眾多機構從多角度給出了解釋,目前主要的定義有3 種:國際標準化組織認為分心駕駛是駕駛人將注意力轉向與駕駛主任務不相關的人或事物上,從而導致感知能力下降的一種現象[9];澳大利亞道路安全委員會對分心駕駛的解釋是駕駛人自愿或非自愿地轉移駕駛任務(不因酒精、藥物、疲勞等因素),并且切換任務是由于駕駛人執行額外的任務而將注意力短暫地集中在無關駕駛的事物、人和活動上[10];NTHSA認為分心駕駛是指駕駛人在駕駛過程中注意力由駕駛任務轉移到另一項活動中的特定類型的注意力不集中[11]。
基于上述分心駕駛定義,考慮酒精、藥物等因素導致的分心駕駛事故對場景搭建具有一定的參考意義,本文將分心駕駛事故定義為:駕駛人在駕駛過程中由于內部或外部因素(包括酒精、藥物等),將注意力轉向與駕駛主任務不相關的人或事物上,導致其駕駛的車輛與其他人或物產生碰撞的事故。
2.2 事故來源與篩選原則
本文研究數據來自上海聯合道路交通安全科學研究中心(SHUFO)交通事故深度調查數據庫中2013~2020年間的1 376例交通事故案例,事故采集地為上海市,該區域包含了所有城市典型道路類型。剔除缺少關鍵資料(如視頻等)導致無法完成事故再現的案例,再依據分心駕駛事故定義進行篩選。篩選原則如下:
a.在警方資料(道路交通事故認定書和詢問筆錄等)中,存在“駕駛人疏忽”等類似信息;
b.如果事故參與方多于2個,僅記錄分析首次碰撞的參與方信息;
c.將存在分心駕駛情況的駕駛人所在車輛定義為主車,如果事故中的2個參與方駕駛人均存在分心駕駛情況,則將道路交通事故認定書中的主要責任車輛定義為主車。
篩選后得到分心駕駛事故375 例,占總樣本量的34%,其中汽車與汽車碰撞事故100 例,汽車與兩輪車/三輪車碰撞事故144例,汽車與行人碰撞事故53例,單車事故78例。
3 分心駕駛事故特征分析
3.1 特征參數的選取
在交通事故深度調查數據庫中,一起乘用車與乘用車碰撞的事故調查涉及參數數量高達1 500個左右,包括環境、車損、人傷等多角度事故信息。本文根據場景的構建需求,將特征參數集中在道路環境、參與方速度和運動狀態3個方面,并在參考現有國內外汽車測試評價標準和相關文獻的基礎上,對原始數據中的參數進行概括歸納,確定了場景中能夠影響安全系統表現且可較完整反映交通環境概況的參數,并作為特征分析與聚類分析的基礎參數,如表1所示。

表1 特征參數定義及值域
3.2 分心駕駛事故特征分析
在聚類分析過程中可能由于聚類簇的限制將部分占比較少的場景參數剔除,從而降低了場景的典型性和代表性。為了識別分心駕駛事故關鍵特征,使其作為核心場景提取的依據,基于篩選得到的375例分心事故案例,對比不同事故類型下的參數分布,分析其中的共性參數。由于不同類型的事故參與方碰撞速度存在較大差異,碰撞速度不在特征分析的考慮范圍內。
由于道路環境相關參數的分布容易受到道路規劃及地域氣候的影響,故有必要調查事故環境情況,作為道路特征、天氣、照明參數的主要對比依據。根據2015~2019年間中國道路交通事故統計年報[12-16]的統計結果:不同道路特征、天氣、照明條件下的交通事故總量分布較為穩定,其中有近76%為路段事故,近24%為路口事故;晴天、陰天、雨天的事故總量占比分別近似為74%、14.5%、10%,其他天氣的事故總量占比僅為1%左右;白天、夜晚有照明、夜晚無照明的事故總量占比分別近似為61%、23%、16%。樣本特征分布與年報數據對比情況如表2所示。
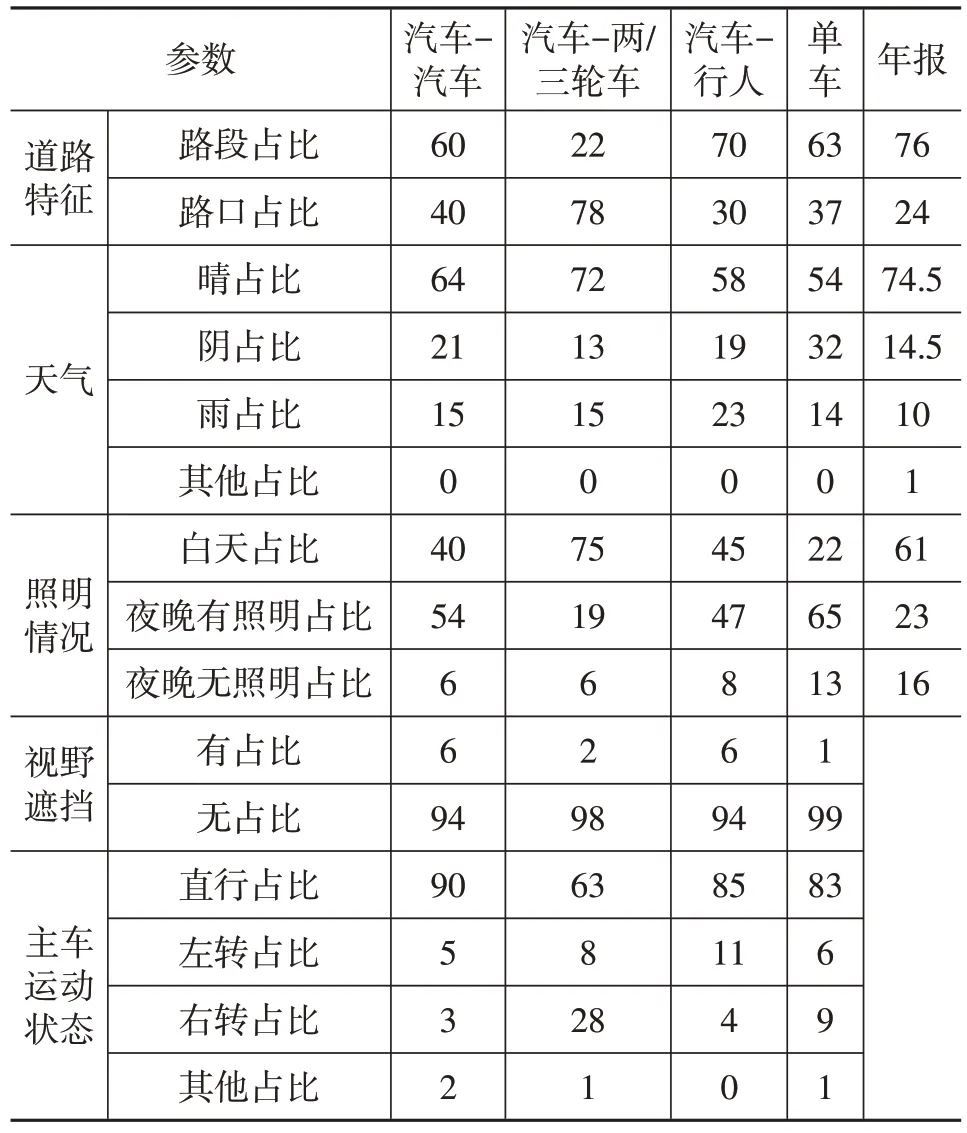
表2 特征分布情況 %
道路特征分布情況與年報的數據相比較可得:4類事故的路口事故總量占比均相對較高,路口道路在分心駕駛事故中更具有代表性,尤其是汽車與兩輪車/三輪車碰撞事故。這反映了城市,尤其是大型城市的交通事故特點。因此本文將路口作為這4 類事故的關鍵特征參數。天氣分布情況與年報數據相比較可知:兩者具有一定的相似性,汽車與兩輪車或三輪車、汽車與行人事故中雨天占比相對較高,故將雨天作為這2類事故的關鍵特征參數。汽車與汽車事故中陰天占比相對年報更高,結合不同的事故類型進行分析,陰天單車事故發生率相對其他事故類型也較高,高出年報統計量近22%,故將陰天作為這2 類事故的關鍵特征參數之一。照明分布情況與年報的數據相比較可得:汽車與汽車、汽車與行人、單車事故的照明分布情況與年報的統計結果截然不同,明顯的差異在于夜晚有照明的事故占比高于其他2種照明情況,故將夜晚有照明作為這3類事故的關鍵特征參數。從不同的事故類型來看,汽車與兩輪車/三輪車的碰撞事故中白天占比相比其他事故類型高出至少30%,并且較年報統計量高近14%,故將白天作為該類事故的關鍵特征參數。
各事故類型視野遮擋分布情況較為接近,無遮擋的占比超過93%,遠高于有遮擋的事故占比,可見視野遮擋物雖然會對駕駛人視線產生干擾,但并不是導致分心駕駛的最直接原因,故將無視野遮擋作為各事故類型的關鍵特征參數。事故參與方類型為汽車與汽車、汽車與行人、單車的主車直行狀態占比均高于80%,是最為常見的運動狀態,故將直行作為這3類事故的關鍵特征參數。汽車與兩輪車/三輪車碰撞事故中主車右轉狀態的占比遠高于其他類型,故將主車右轉作為該事故類型的關鍵特征參數。
根據以上特征分析結果,各事故類型的關鍵特征參數如表3所示,可以作為分心駕駛場景參數提取的主要依據。

表3 關鍵特征參數
4 分心駕駛事故場景研究
4.1 聚類算法
二階聚類法(Two Step Cluster,TSC)是一種智能聚類算法,共分為2 個階段。第1 個階段為預聚類,應用基于分層的平衡迭代規約聚類(Balanced Iterative Reducing and Clustering using Hierarchies,BIRCH)算法中聚類特征(Clustering Feature,CF)樹生長理論依次處理數據集中的數據點。BIRCH 算法是一種層次聚類算法,CF 樹在依次處理數據點過程中不斷添加、更新和分裂葉子節點形成諸多子簇[17]。第2 個階段為聚類,在CF 樹基礎上采用對數似然距離進行度量,根據距離最小原則合并預處理的子簇,從而得到合適的聚類集合[18]。二階聚類法與其他傳統的聚類方法存在顯著區別,其可自動確定最佳聚類數量,并可同時處理離散型數據和連續型數據的聚類問題。由于本文參數包含連續型數據(碰撞速度)和離散型數據(除碰撞速度以外的參數),故應用二階算法進行聚類分析。
4.2 聚類結果
應用SPSS 軟件,根據事故參與方類型的不同分別進行二階聚類分析,得到汽車與汽車沖突的2 類結果、汽車與兩輪車/三輪車沖突的4類結果、汽車與行人沖突的2類結果、單車沖突的3類結果,如表4所示。
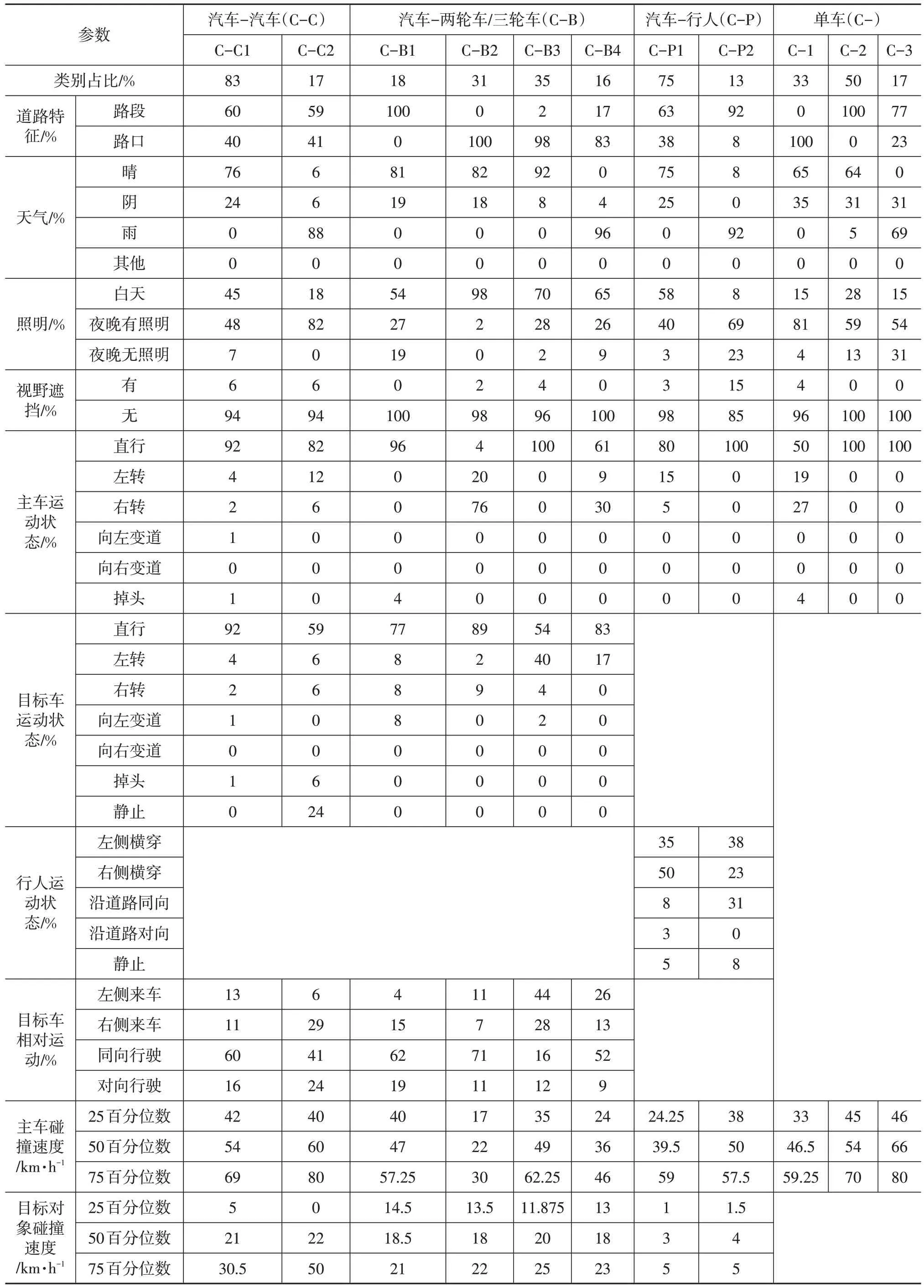
表4 聚類結果頻數
4.3 典型場景提取
根據聚類分析參數分布情況,為突出場景的典型性,制定提取規則:對于離散型變量,選取同一參數下數量最多的參數值;對于連續型變量,選取中位數(50百分位數)。由此可得到11 類分心駕駛事故典型場景。
針對汽車與汽車(C-C)事故類型,如圖1所示,2類典型場景是在夜晚有環境照明的路段或路口,主車與目標車同向行駛發生追尾,主車的速度是目標車速度的近3倍。這是由于在分心駕駛狀態下,主車駕駛人易忽視或不重視跟車風險,造成追尾事故。
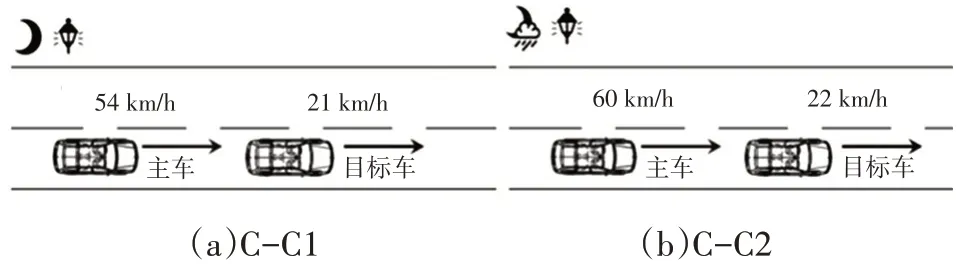
圖1 C-C典型場景示意
針對汽車與兩輪車/三輪車(C-B)事故類型,如圖2所示,其中C-B1 和C-B4 場景均為主車與兩輪車/三輪車在白天發生直行追尾事故,區別在于C-B1是在晴天條件下的路段,主車車速較快,而C-B4場景是在雨天條件下的路口。C-B2 場景是白天、晴天條件下右轉主車與直行的兩輪車/三輪車發生同向刮擦事故。C-B3 場景是在白天、晴天條件下直行主車與右側道路駛來的直行兩輪車/三輪車發生事故。其中C-B2和C-B3場景占比較高,分別為31%和35%,是該類事故中主車駕駛人分心的典型場景。汽車與兩輪車/三輪車碰撞的分心駕駛事故中78.47%發生在路口,原因在于汽車駕駛人容易被復雜多變的路口交通環境影響,導致注意力分散,不能及時規避視野盲區駛出的兩輪車/三輪車,造成交通事故。
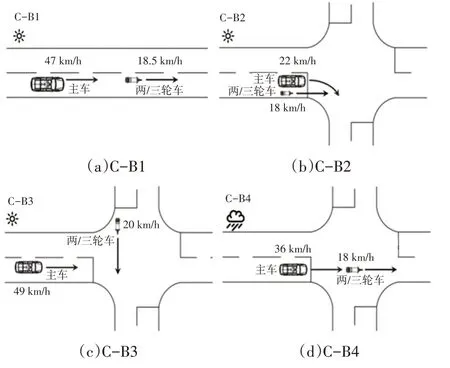
圖2 C-B典型場景示意
針對汽車與行人(C-P)事故類型,如圖3 所示,CP1 場景是白天、晴天條件下直行主車與從右側橫穿馬路的行人發生事故。C-P2 場景是在雨天、夜間有照明條件下直行主車與從左側橫穿馬路的行人發生事故。其中,C-P1場景的事故數量占比(75%)遠大于C-P2場景事故數量占比(25%)。這是由于中國道路通行規則是靠右側行駛,行人從右側橫穿馬路時離車輛更近,在駕駛人分心狀態下更容易發生事故。
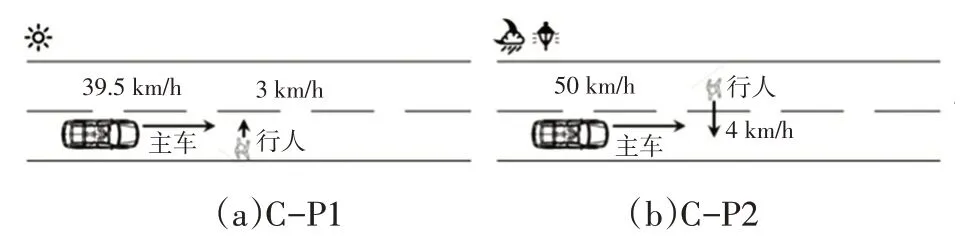
圖3 C-P典型場景示意
針對單車(C-)事故類型,如圖4所示,3類場景均發生在夜晚,直行主車與道路設施或障礙物等產生沖突。通過分析事故調查資料,發現大部分夜間行駛單車事故中,駕駛人在碰撞前都未及時采取制動或轉向操作,且其中51%的事故是由酒后駕駛引起的。
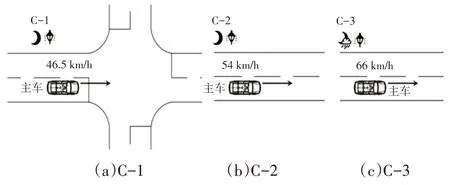
圖4 C-典型場景示意
4.4 核心場景提取
在典型場景提取的基礎上,根據特征分析中確定的關鍵特征參數,對典型場景中相應的特征參數進行調整,并對部分速度參數進行優化,得到核心場景,如圖5所示。
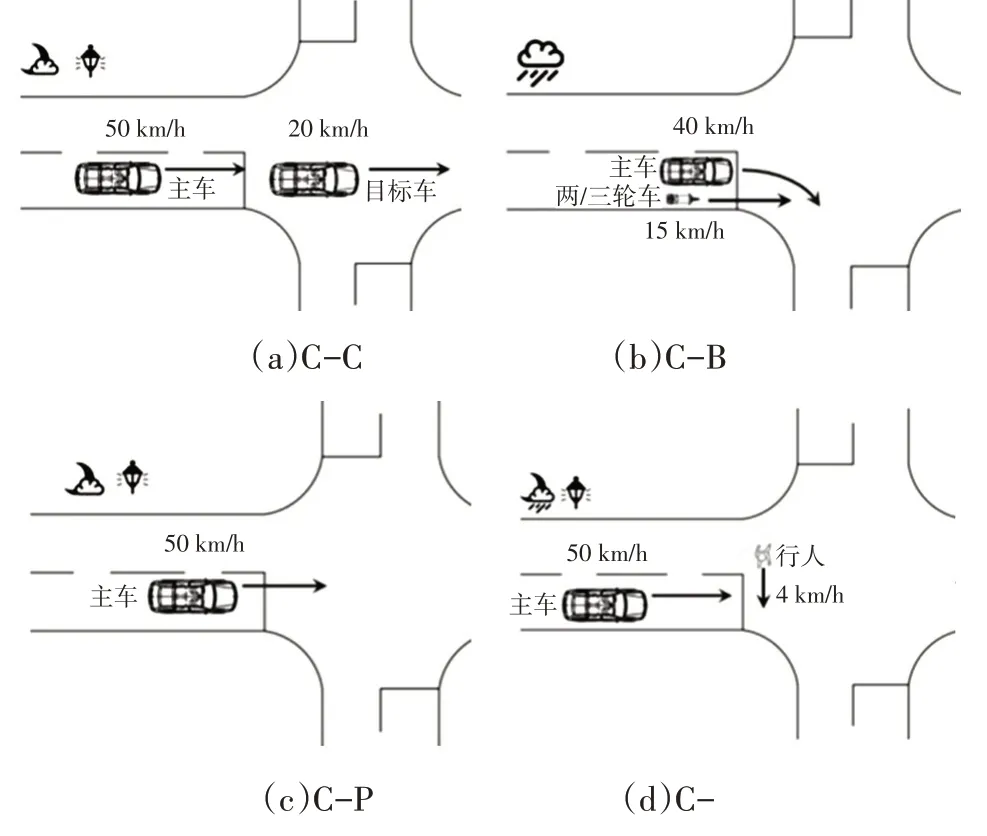
圖5 核心場景示意
對于汽車與汽車事故類型,2 類典型場景的道路特征均為路段且不包含陰天,未體現關鍵道路特征和天氣特征。聚類結果中C-C1 場景路口占比(40%)與C-C2 場景(41%)相似,但前者陰天的占比(24%)相對后者(6%)更高,故調整C-C1 場景的道路特征、天氣參數,得到汽車與汽車事故類型核心場景,如圖5a 所示。
對于汽車與兩輪車/三輪車事故類型,雖然C-B2場景除天氣因素外均與關鍵特征參數相符,但聚類結果中并不包含雨天事故。C-B4 場景中僅主車運動狀態參數與關鍵特征參數不符,且聚類結果中包含主車右轉事故(30%),故調整C-B4 場景的主車運動狀態,得到汽車與兩輪車/三輪車沖突的核心場景,如圖5b所示。
對于汽車與行人事故類型,2類典型場景中均未體現關鍵道路特征:C-P1 場景所對應的聚類結果中不包含雨天事故,與關鍵特征參數不符;C-P2場景與關鍵特征參數的差異僅在于道路,且聚類結果中存在路口事故(8%)。故調整C-P2場景的道路特征,得到汽車與行人沖突的核心場景,如圖5c所示。
對于單車沖突事故類型,C-1場景參數與關鍵特征參數僅在天氣上存在差異,且聚類結果中包含陰天事故(35%),故調整C-1 場景的天氣特征,得到單車沖突的核心場景,如圖5d所示。
5 結束語
為構建分心駕駛事故場景,本文基于375例分心駕駛真實事故案例,結合事故特征分析與二階聚類分析方法得到11類中國真實交通環境下的分心駕駛事故典型場景。其中包括2 類汽車與汽車沖突場景、4 類汽車與兩輪車和三輪車沖突場景、2類汽車與行人沖突場景和3 類單車沖突場景,并在此基礎上得到4種分心駕駛事故核心場景。由于樣本數據中缺乏較可靠的駕駛人姿態資料,后續將進一步通過試驗仿真平臺開展更有針對性的分心駕駛研究,形成更加完整的測試場景評價體系。
猜你喜歡
中學生數理化(高中版.高考理化)(2021年6期)2021-07-28 06:21:04
人大建設(2019年9期)2019-12-27 09:06:30
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
NBA特刊(2014年7期)2014-04-29 00:44:03
中國商人(2013年1期)2013-12-04 08:52:52
兒童時代(2009年5期)2009-05-21 05:31:26