電動汽車驅動電機旋變信號實時采集系統設計
2023-06-20 09:53:06李占坤
汽車實用技術 2023年11期
李占坤
電動汽車驅動電機旋變信號實時采集系統設計
李占坤
(泛亞汽車技術中心有限公司,上海 210210)
隨著汽車產業“新四化”的提出,作為其基礎的電動化已成為汽車領域發展的必然趨勢,而電動化汽車的核心部件驅動電機是研究的重點和難點。文章主要針對電動汽車驅動電機的位置檢測為研究對象,利用旋轉變壓器及解碼芯片AD2S1210和英飛凌控制芯片實現驅動電機的位置實時檢測和采集。實驗表明,該系統方案具有高可靠性和實時性的特點。
電動汽車;驅動電機;旋變信號;AD2S1210;GPT12
電動化汽車的發展要求對汽車驅動電機的位置檢測越加嚴格。加之電動化汽車不同于普通的消費電子產品,用于汽車電機的位置檢測傳感器要求可以在惡劣的工況條件下使用,不僅要求具有耐沖擊、耐振動、耐高溫和抗干擾等,而且還要保證性能穩定、實時性好、速度響應快、適用轉速高等特點。相比于光柵編碼器和霍爾傳感器等產品,旋轉變壓器更加符合電動汽車的工況要求和性能要求。
本系統中采用AD2S1210實現對旋轉變壓器信號進行處理,利用英飛凌TC2XX芯片的通用定時單元12(General Purpose Timer 12, GPT12)模塊實現對驅動電機高速工況的位置實時采集。
1 旋轉變壓器工作原理和解碼芯片AD2S1210
旋轉變壓器輸出的信號為模擬信號,因為在機電控制系統中需要將其產生的模擬信號轉換為控制系統能夠識別的數字信號,該功能可通過旋變-數字轉換芯片AD2S1210實現。
1.1 旋轉變壓器
旋轉變壓器基于電磁耦合原理設計,輸出電壓隨轉子轉角變化[1],主要由初級勵磁繞組(R1- R2)和兩相正交次級感應繞組(S1-S2, S3-S4)兩部分組成。初級繞組和次級繞組均位于定子上。一般旋轉變壓器電氣原理如圖1所示。
當旋轉變壓器轉子隨電子同步旋轉、初級勵磁繞組外加勵磁信號后,次級兩輸出繞組中便會產生感應電動勢,大小為勵磁與轉子旋轉角的乘積。輸出電壓的計算公式為
E1-S3=0sin?sin(1)
E2-S4=0sin?cos(2)
式中,為轉子電角位置;sin為轉子激勵頻率;0為轉子勵磁信號幅度。

圖1 旋轉變壓器電氣原理圖
1.2 AD2S1210
AD2S1210為美國德州儀器公司推出的一款10位至16位分辨率旋變數字轉換器[2-3],可為旋轉變壓器提供可編程激勵頻率,具有串行通信和并行通訊方式,TypeII跟蹤環路能夠連續輸出位置數據且沒有轉換延遲,提供增量式編碼器仿真輸出。圖2為AD2S1210功能框圖。
AD2S1210將旋轉變壓器輸出的正余弦信號轉換為數字輸出[4]。對于轉子角度進行跟蹤采用的原理是反饋角通過轉換器產生,并比較輸入角和反饋角。做以下公式變換:


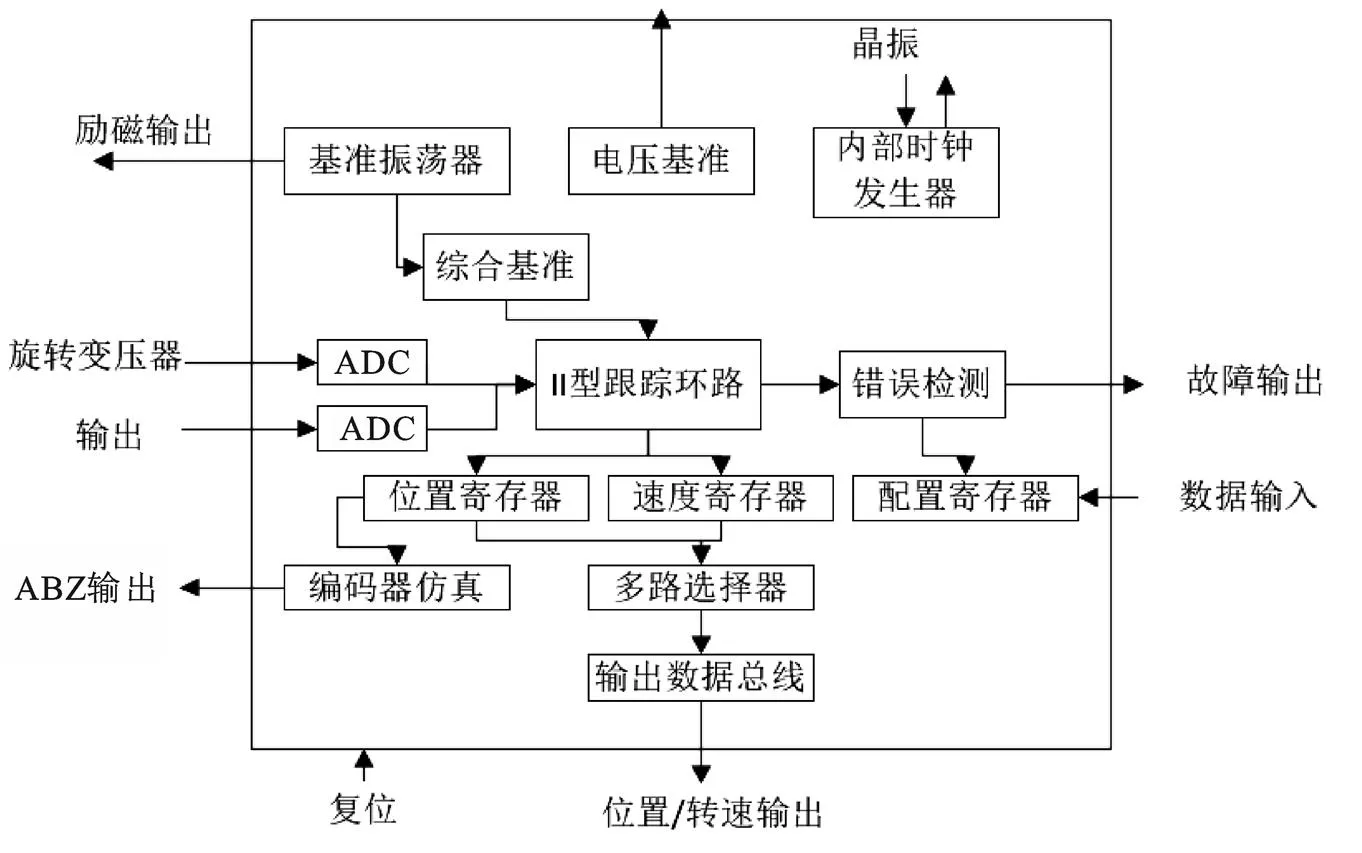
圖2 AD2S1210功能框圖
差值化簡化處理后可得
?=0sin?sin(-) (5)
當sin(-)逐漸趨于零,即(-)=0時,誤差信號為零,即AD2S1210的輸出角度為旋轉變壓器的實際轉子角度。
2 驅動電機位置采集方案設計
使用英飛凌TC2XX處理器作為控制芯片,完成對采集到的信號處理以驅動電機。為解決在高速條件下AD2S1210串口通信無法準確采集電機位置的問題,利用AD2S1210的增量式編碼器仿真器功能和TC2XX的GPT12模塊完成在高速模式下的位置檢測。
2.1 AD2S1210串行模式位置檢測
圖3為主控芯片與AD2S1210連接示意圖,TC2XX通過讀控制信號、寫控制信號、復位控制信號RESET和采樣控制信號SAMPLE來控制AD2S1210的工作。
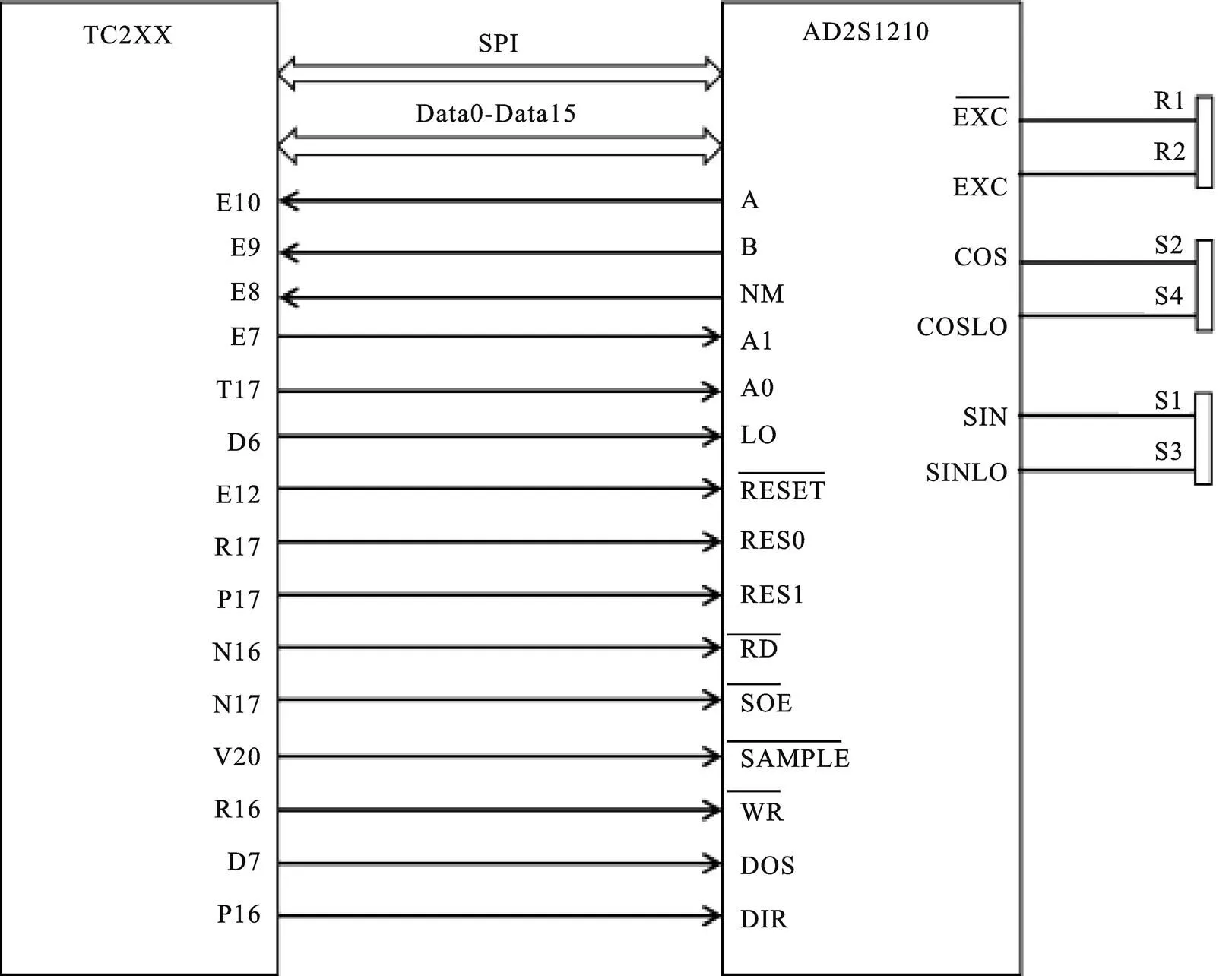
圖3 主控芯片與AD2S1210連接示意圖
AD2S1210在配置模式和普通模式下均可以進行位置信息檢測,通過對A0和A1輸入進行設置實現。表1為A0和A1輸入的工作模式設置。
表1 A0和A1輸入的工作模式設置
輸入信號工作模式 A0A1 00普通模式–位置輸出 01普通模式–速度輸出 10Reserve 11配置模式
在普通工作模式下,輸出信號的分辨率通過RES0和RES1輸入設置實現。表2為RES0和RES1輸入分辨率設置。
AD2S1210與TC2XX的通訊既可以采用并行模式,又可以采用串行模式,本系統中僅研究串行通訊模式。DB13為串行時鐘輸入SCLK,所有數據傳輸均相對于該SCLK信號進行。DB14為串行數據輸入(Serial Data Input, SDI),用于將數據傳輸至片內寄存器中。DB15為串行數據輸出(Serial Data Output, SDO),用于從片內寄存器獲取位置數據。WR/FSYNC用于幀同步數據。SOE處于低電平,串行口使能。
表2 RES0和RES1輸入的分辨率設置
輸入信號分辨率(位) RES0RES1 0010 0112 1014 1116
在普通模式下從AD2S1210讀取位置數據。首先利用SAMPLE輸入更新位置寄存器存儲的信息,串行接口讀取時序如圖4所示。
綜上分析,使用串口通信模式時,本方案采用普通工作模式下輸出分辨率為12位,勵磁頻率為10 kHz的位置檢測。
2.2 GPT12增量式編碼器位置檢測
在低速通信模式下,串口通信完全可以滿足實時性和精準性的要求。但是在高速模式下,串口通信占用指令周期長,實時性差,無法滿足高速電機的系統要求[5]。并行通信雖然可以滿足,但是所需引腳較多,設計較為復雜,因為本方案中采用AD2S1210輸出的ABZ信號,利用增量式編碼器仿真通信輸出,使用TC2XX中GPT12實現高速狀態的位置檢測。
TC2XX的GPT12包括5個16位定時器,分到兩個定時器通用定時單元1(General Purpose Timer 1, GPT1)和通用定時單元2(General Purpose Timer 2, GPT2)中。
本方案中A、B信號連接GPT12的T2定時器,選擇增量編碼模式,輸入模式選擇A、B上下邊沿全檢測,利用A、B信號的超前波形特征來實現方向的檢測和控制。NM信號連接GPT12的T4定時器,選擇捕獲模式,在上升沿時進入中斷,完成T2定時器清零和串行外設接口(Serial Peripheral Interface, SPI)模式與ABZ模式的切換。圖5為選擇增量編碼模式下定時器T2的模塊框圖,TxIN連接AD2S1210的A信號,TxEUD連接B信號。
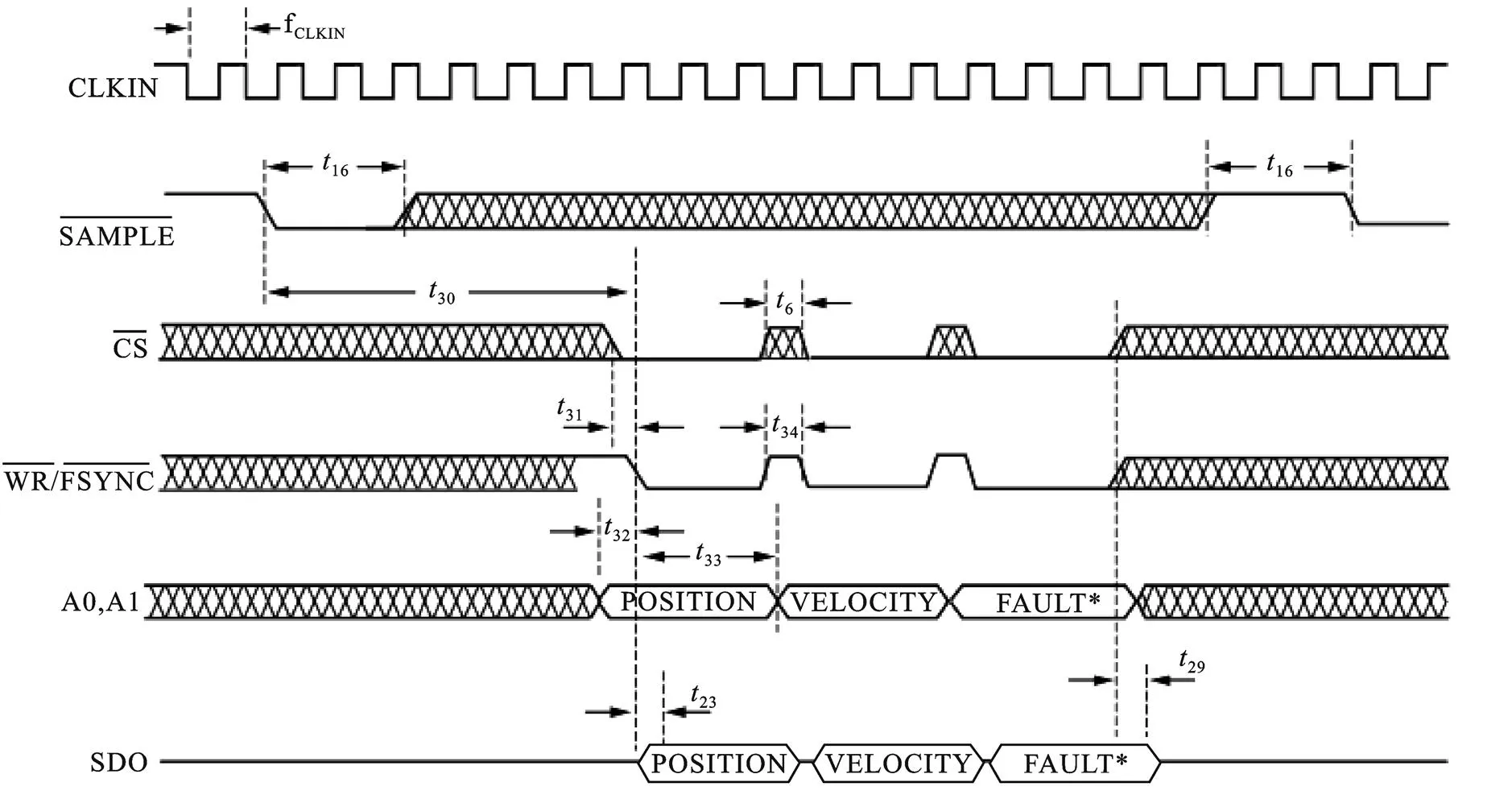
圖4 串行接口讀取時序

圖5 增量編碼模式T2定時器框圖
AD2S1210輸入到TC2XX中的A、B信號,通過T2獲取其脈沖數,即可獲得電機的位置信息。A、B信號的計數信號如圖6所示。
采用12位分辨率,電機轉動一圈將產生4 096個A、B脈沖。角旋轉不斷增大時(正轉,即順時針方向),脈沖A超前于脈沖B。當絕對位置經過零點時,即產生路標脈沖,該狀態下,定時器T4進入中斷,清除T2計數值。A、B和NM信號之間的關系如圖7所示。
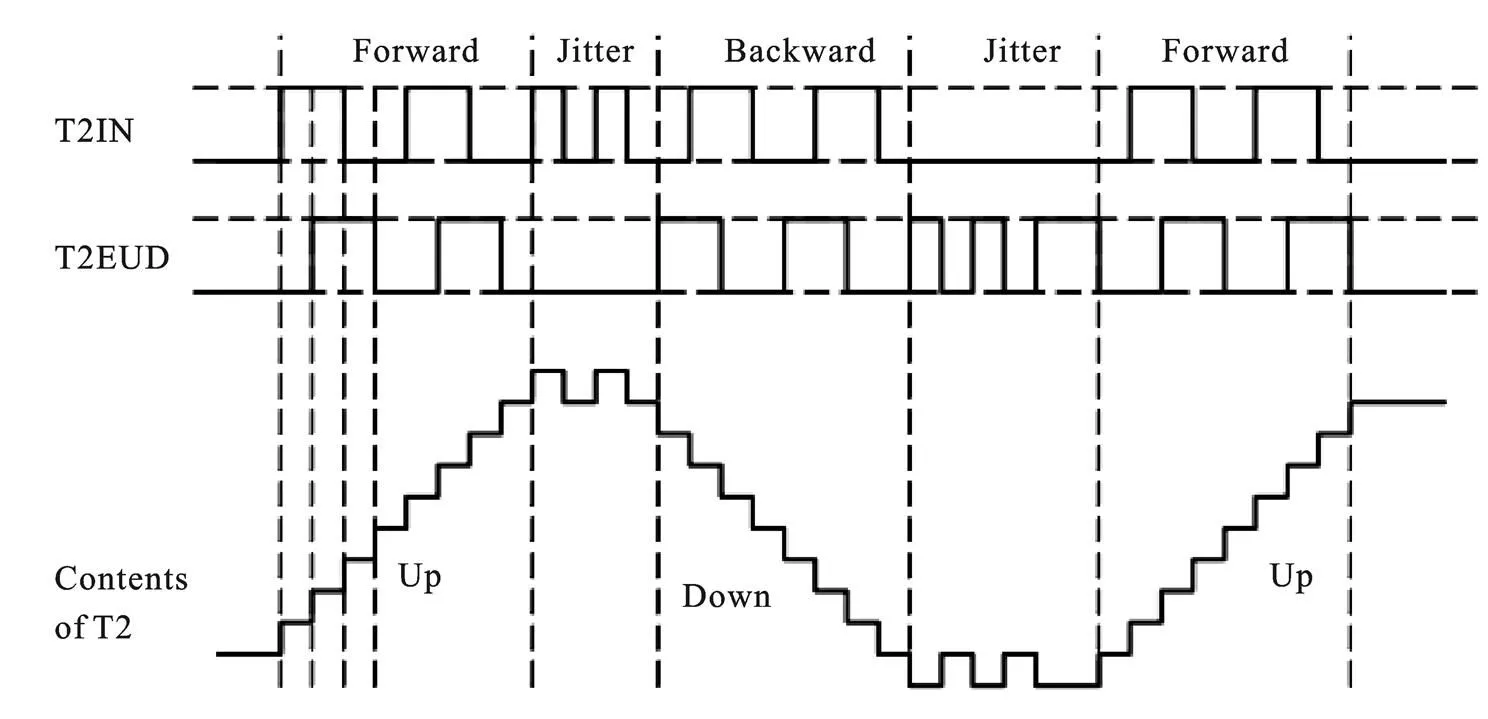
圖6 A、B信號的計數信號
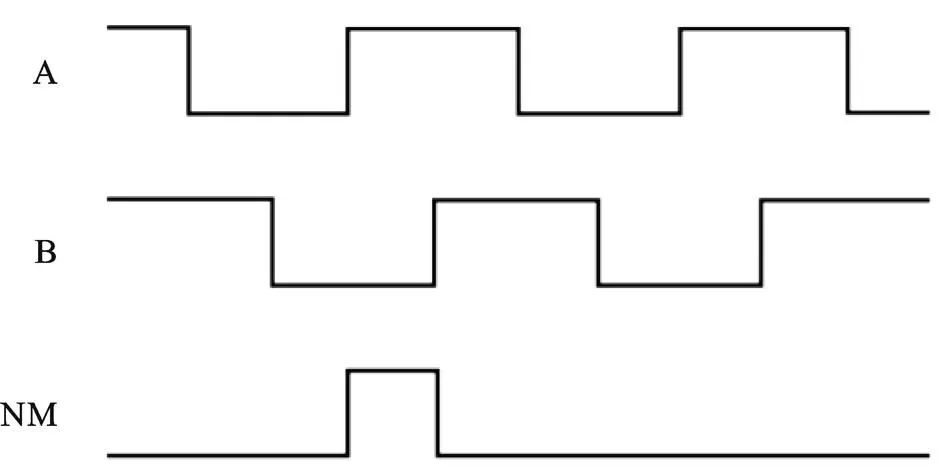
圖7 順時針旋轉的A、B和NM時序
2.3 系統搭建
通過上述分析,實現了利用AD2S1210的串行通訊在低速模式的位置檢測,利用增量編碼器仿真接口和GPT12在高速狀態下的位置檢測。其中高速閾值為標定值,保存在非易失內存區域,可動態標定。初始狀態下,使用串行外設接口(Serial Peripheral Interface, SPI)進行位置檢測。圖8為本系統軟件設計流程,其中系統啟動過程包括微控制器單元(Micro Controller Unit, MCU),模數轉換模塊(Analog to Digital Conversion, ADC),脈沖寬度調制(Pulse Width Modulation, PWM),捕獲比較單元6(Capture Compare Unit 6, CCU6)等模塊初始化。
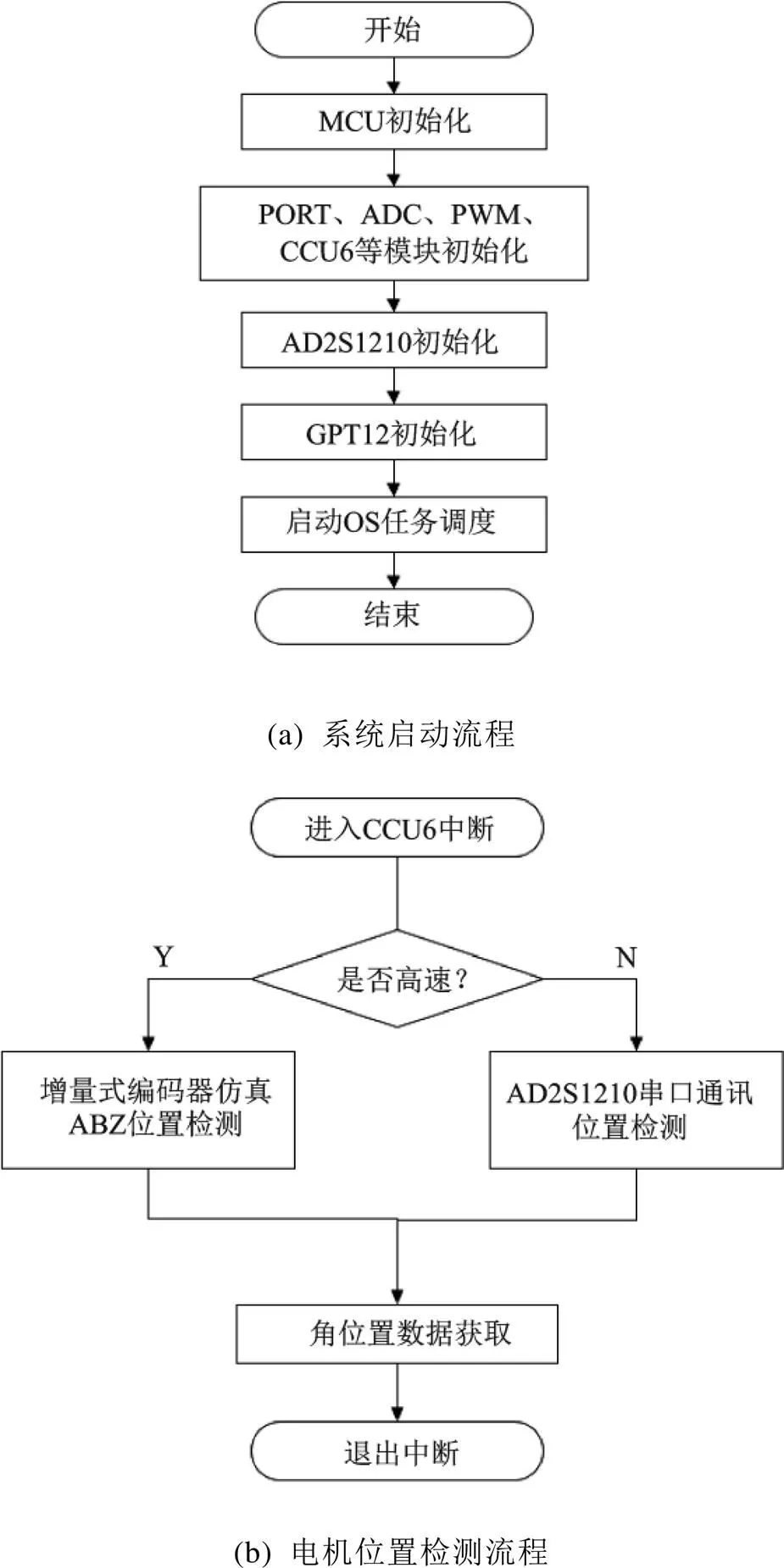
圖8 軟件設計流程
3 實驗驗證及結果分析
搭建電機測試環境,使用Labview搭建上位機顯示界面。測試電機的運轉狀態和位置獲取數據。圖9為通過控制器局域網(Controller Area Network, CAN)通信發送到上位機的電機位置信息,位置信息通過10 ms CAN報文發送。
實驗結果表明,在高速狀態下,利用AD2S1210的增量編碼仿真器輸出與GPT12獲得的位置信息連續性好,沒有因外界干擾而出現信號丟失或中斷現象,在絕對位置經過零點時,位置數據歸零。綜上所述,該方案能夠很好地完成對電機位置的精確檢測且穩定性好。
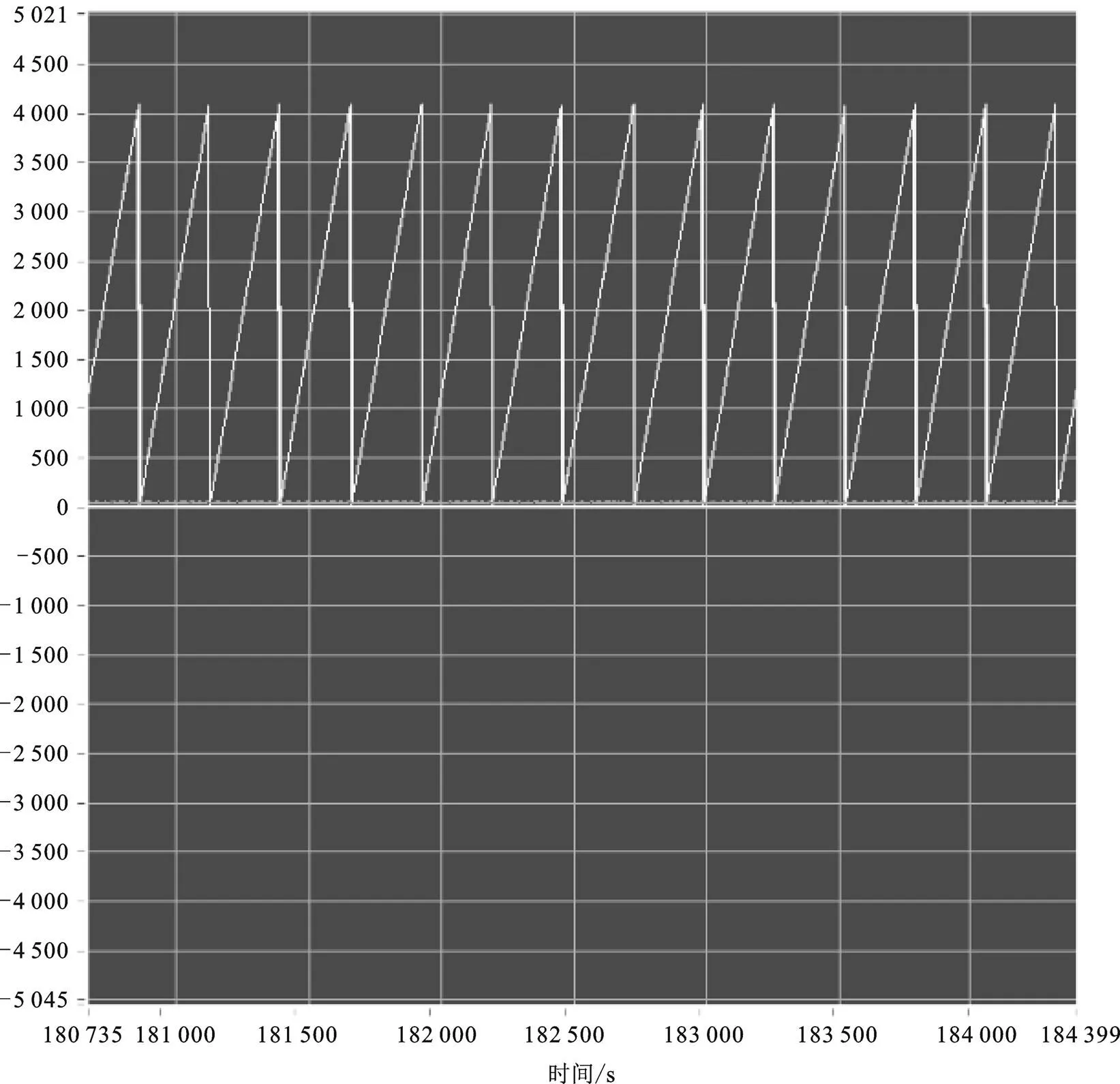
圖9 上位機電機位置信息軟件設計流程
4 結論及展望
本文針對電動化汽車驅動電機的位置進行采集,通過設計基于AD2S1210的串行通訊和增量式編碼器仿真輸出與GPT12的兩種位置檢測方案,并進行實驗驗證和分析,實驗驗證了該方案具有良好的實時性和穩定性。后續將進一步對高低速切換時信號偏差消除策略以及位置檢測的精度和速度檢測進行研究。
[1] 王識君,朱紀洪,和衛星,等.AD2S1210在伺服電機控 制系統中的應用[J].信息技術,2015(7):102-105.
[2] 陳夢民,王艷.基于AD2S1210的旋轉變壓器解碼系統設計[J].電子設計工程,2018,26(3):121-122.
[3] 李兵,胡亮燈.基于旋轉變壓器的PMSM位置和速度檢測方法[J].微特電機,2019,47(3):40-43.
[4] 莫會成,閔琳.現代高性能永磁交流伺服系統綜述:傳感裝置與技術篇[J].電工技術學報,2015,30(6):10-21.
[5] 謝瑞,王旭東,周凱,等.基于TC1782的永磁同步電機直接轉矩控制[J].哈爾濱理工大學學報,2018,23(1): 75-80.
Design of Real-time Acquisition System for Rotation Signal of Electric Vehicles Driving Motor
LI Zhankun
( Pan Asia Technical Automotive Center, Shanghai 210210, China )
With the automobile industry "new four modernizations" proposed, electrification has become an inevitable trend in the field of automobile development, and the drive motor, the core component of the electric vehicle, is the focus and difficulty of the research. The position detection of electric vehicles driving motor is studied, real-time detection and acquisition of driving motor position are realized by resolver and decoder chip AD2S1210 and Infineon control chip. Experi- ments show that the system has high reliability and real-time characteristics.
Electric vehicles; Driving motor; Rotation signal; AD2S1210; GPT12
TP368.2
A
1671-7988(2023)11-22-06
李占坤(1983-),男,碩士,工程師,研究方向為嵌入式汽車電子軟件開發,包括操作系統、診斷刷新等基礎軟件技術應用,E-mail:lzk2015@163.com。
10.16638/j.cnki.1671-7988.2023.011.004
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
通信電源技術(2018年3期)2018-06-26 06:33:30
現代工業經濟和信息化(2016年4期)2016-05-17 05:35:38
海峽科技與產業(2016年3期)2016-05-17 04:32:12
