無人駕駛汽車的軌跡優化研究
2023-06-20 10:05:14徐長釗
汽車實用技術 2023年11期
關鍵詞:模型
于 洋,徐長釗,王 釗,韓 達,張 坤
無人駕駛汽車的軌跡優化研究
于 洋,徐長釗,王 釗,韓 達,張 坤
(山東華宇工學院,山東 德州 253000)
文章重點研究無人駕駛車輛的軌跡跟蹤問題,選取模型預測控制理論作為此次研究的理論基礎。首先設定汽車的前輪轉角作為相應的控制量,將汽車的橫向位置和橫擺角設置為狀態量,建立起汽車的三自由度動力學模型,然后結合魔術輪胎公式,為保證模型的精度有效性,對現有模型進行線性化和離散化處理,完成預測模型的初步構想,在此基礎上增加松弛因子和軟約束,從而完成增量線性時變模型軌跡的建立。模型優化完成后,通過Simulink/ CarSim 聯合仿真平臺進行驗證,設定不同仿真工況,盡可能模擬無人駕駛車輛遇到的復雜工況,經多次仿真實驗,文章設計的軌跡跟蹤控制器在良好路面條件下,最高安全縱向行駛速度為68 km/h,為后續無人駕駛深入研究提供數據基礎。
無人駕駛車輛;模型預測控制;軌跡跟蹤優化;Simulink/CarSim聯合仿真
汽車技術雖然已發展多年,但在某些路面附著系數小的極端路況下,仍無法保證車輛行駛安全。隨著信息通訊處理技術、傳感器技術和車輛控制技術的不斷發展,各汽車廠商開始研發無人駕駛技術,由于在提升汽車主動安全性、改善交通效率以及降低能耗等方面的巨大潛能,無人駕駛技術已經成為當前汽車行業的研發熱點之一[1]。
1 國內外無人駕駛技術研究現狀
國際方面,除了歐美傳統車企,Google 和蘋果等互聯網公司的介入,使得無人駕駛汽車這一領域空前火爆。近十年來,谷歌科技公司進行了100多公里路程的無人實車試驗,還設計了沒有方向盤和踏板的樣車,這是無人車研究和發展的重大突破[2]。
國內方面,多家汽車制造主機廠,諸如長安、一汽、東風、吉利等汽車公司也相繼成立智能車事業部,自主或合作研制無人車項目。百度無人駕駛研究開始于2013年,其采用線性二次調節器進行軌跡跟蹤控制,可完成多種工況下的軌跡跟蹤任務[3]。
2 無人駕駛技術控制方法
對于無人駕駛,車輛自動轉向系統在其中有非常重要的地位[4]。無人駕駛汽車能夠實現的最基本要求即軌跡跟蹤,但由于很難建立一個精確的非線性且高度耦合的模型,導致精確且穩定的軌跡跟蹤控制成為無人駕駛技術研究中的重難點[5]。
日前眾多學者對這一問題提出了多種控制方案。其中模型預測控制是帶約束優化滾動求解問題的控制方法,該方法通過建立控制系統的動力學模型進而預測未來一段時間內系統的輸出,通過求解帶約束的最優控制問題使得系統的跟蹤誤差最小[6-7]。
3 增量線性時變模型預測設計
對于模型預測,其重要的要素包括三部分,即預測模型、滾動優化、反饋校正,本文將在這三個基本要素的基礎上建立需要的增量線性時變模型預測軌跡跟蹤器[8-9]。
3.1 預測模型
3.1.1車輛動力學單軌模型
為了提高無人駕駛汽車狀態描述的準確性,選用動力學模型對車輛進行建模。將車輛底盤視為一個剛體,分別沿軸、軸和繞軸應用線性動量原理。
在軸方向上:

在軸方向上:

在軸方向上:

式中,、分別為質心到前、后軸的距離;為車輛整備質量;I為車輛繞軸的轉動慣量;為質心橫擺角。
輪胎的縱向力、側向力可以表示為輪胎側偏角、滑移率、路面摩擦系數和垂直載荷等參數的復雜函數為


式中,為輪胎側偏角;為滑移率;為路面摩擦系數;F為輪胎所受到的垂直載荷。
系統的狀態空間表達式為

3.1.2基于魔術公式的輪胎模型
在進行汽車仿真時,輪胎所受的力和I對車輛行駛的平順性和操縱穩定性有著重要的作用。本文研究對象為以魔術公式為基礎的經驗輪胎模型。
魔術公式的一般表達式為

式中,為輸出變量;為輸入變量;為剛度因子;為形狀因子;為峰值因子;為曲率因子。
利用魔術公式計算輪胎的縱向力和側向力的關系式如下:
輪胎縱向力為


式中,
式中,為縱向滑移率;h為曲線的水平方向漂移;S為曲線的垂直方向漂移。
輪胎側向力為


式中,




式中,為輪胎側偏角。
在輪胎縱向力和側向力的計算中,選擇輪胎型號為 255/75 R16,相關參數如表1和表2所示。
表1 魔術公式輪胎參數1
參數CA1A2A3A4A5A6 取值1.65-341 2503 03612.80.005-0.02 參數A7A8A9A10A11A12A13 取值0.7740.0020.0130.00319.161.216.26
表2 魔術公式輪胎參數2
參數CB1B2B3B4B5 取值2.37-9.471 4911292760.088 參數B6B7B8B9B10 取值0.0040.061.210.03-0.17
輪胎側向力計算結果如圖1所示。
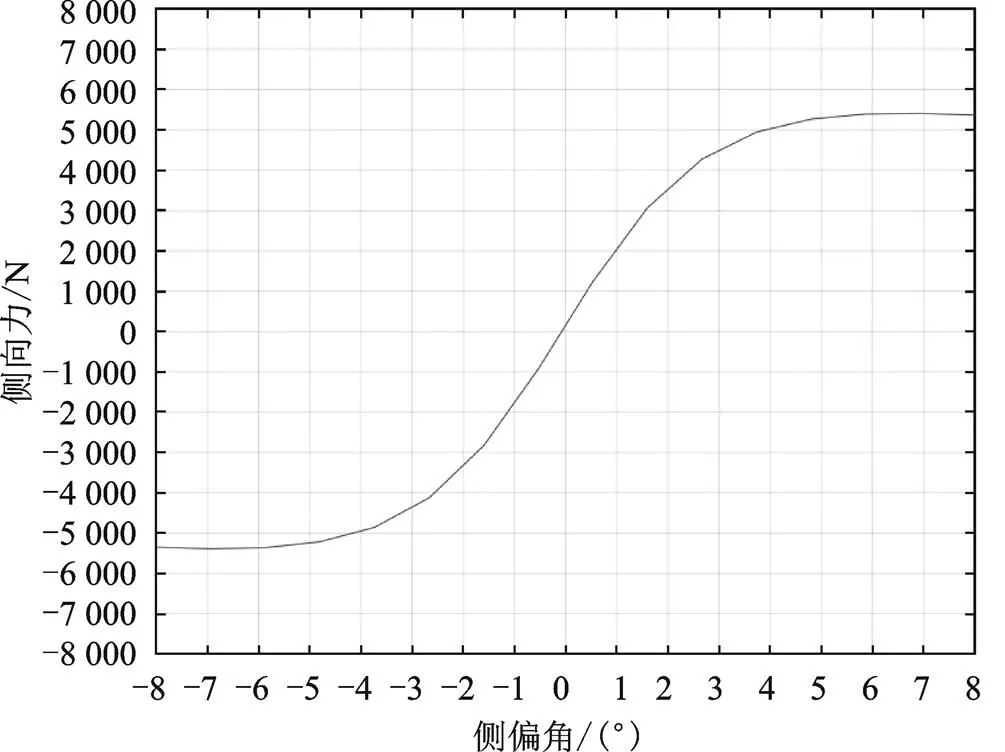
圖1 輪胎側向力與側偏角關系曲線
輪胎縱向力計算結果如圖2所示。

圖2 輪胎縱向力與縱向滑移率關系曲線
當側偏角在-2°與+2°之間,縱向滑移率在-5.5到5.5之間時,側偏力和縱向力近似線性關系。
3.1.3線性、離散化
車輛在高速行駛過程中對運動控制器實時性要求很高,非線性模型預測控制難以滿足,線性時變模型預測控制相對于非線性模型預測控制,有著計算量小,方便求解的特點,因此對模型進行線性化處理。
該系統在任意時刻狀態量和控制量滿足:
對其泰勒公式展開,進行線性優化然后整理可得

但得到的這個新的狀態方程是連續性的,需要對其進行離散化處理才可以作為預測模型進行使用:

最后系統未來時刻的輸出可以表示為

3.2 滾動優化
3.2.1目標函數設計
若以控制量作為目標函數中的狀態量,雖然結構比較簡單,較易于實現,但無法對控制增量進行精確約束,因此,本文把控制增量作為目標函數的狀態量,建立增量線性時變控制器。
優化目標函數可設為以下形式:
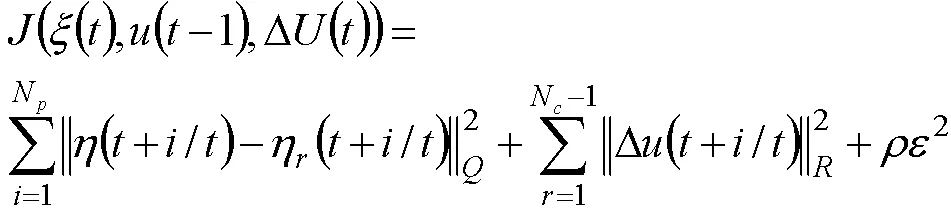
式中,為權重系數;為松弛因子;為輸出偏差的權值矩陣;為控制增量的權重系數。
在實際的軌跡跟蹤過程中,還需要滿足系統狀態量、控制量及控制增量的一些約束條件。
3.2.2約束條件設計
1.控制量約束

2.控制增量約束

3.車輛附著條件約束
輪胎與地面附著條件制約著汽車的動力性能,因此,需要對車輛的附著條件進行約束。縱向加速度和橫向加速度受到地面附著力的限制,存在如下關系:
式中,a,a分別為汽車的縱向和橫向加速度。
考慮到汽車行駛過程中路況的復雜性,為避免求解失敗,需要將車輛附著條件約束設為軟約束。

式中,a,min和a,max為加速度極限約束。
結合上述得到的預測模型及設計的優化目標函數及其約束條件,就構成了完整的增量線性時變模型預測控制器。
3.3 反饋校正
成每個控制周期內的求解后,可以得到控制時域內一系列控制增量:

將所得的控制序列的第一個元素作為實際控制輸入增量加入上一節所述的未來輸出量的計算中,可得到:

控制增量作用于系統的當前時刻,系統執行這一控制量直到下一時刻,在新的時刻,系統根據狀態信息重新預測下一段時域的輸出,循環往復,直到系統完成控制過程,實現最優滾動控制。
4 增量線性時變模型仿真驗證
本文搭建了Simulink和CarSim聯合仿真平臺對模型進行驗證。在車輛行駛穩定性測試方法中,雙移線工況是使用頻率較高的一種測試路段,本文采用雙移線軌跡,通過模擬換道或緊急避障的無人駕駛車輛,對不同行駛速度下的軌跡跟蹤控制器進行性能驗證。
雙移線軌跡方程可由期望橫向位置ref和期望橫擺角ref構成。橫向位置和橫擺角都可表示為關于縱向位置的非線性函數:

式中,

為盡可能減小軌跡跟蹤誤差,同時保證軌跡跟蹤過程中無人駕駛車輛的穩定性。在增量線性時變模型使用的參數如表3所示。
表3 增量線性時變模型使用的參數
參數數值參數數值 NP20a1.18 NC5b1.77 m1 590Cl63 600 IZ2 385Cc60 500
4.1 CarSim汽車模型的建立
本文通過 CarSim 仿真平臺建立了無人駕駛車輛的全車模型。仿真測試選用車型為通用性更強的家用轎車F-Class,具體 CarSim 整車及零部件性能參數如圖 3—圖5所示。
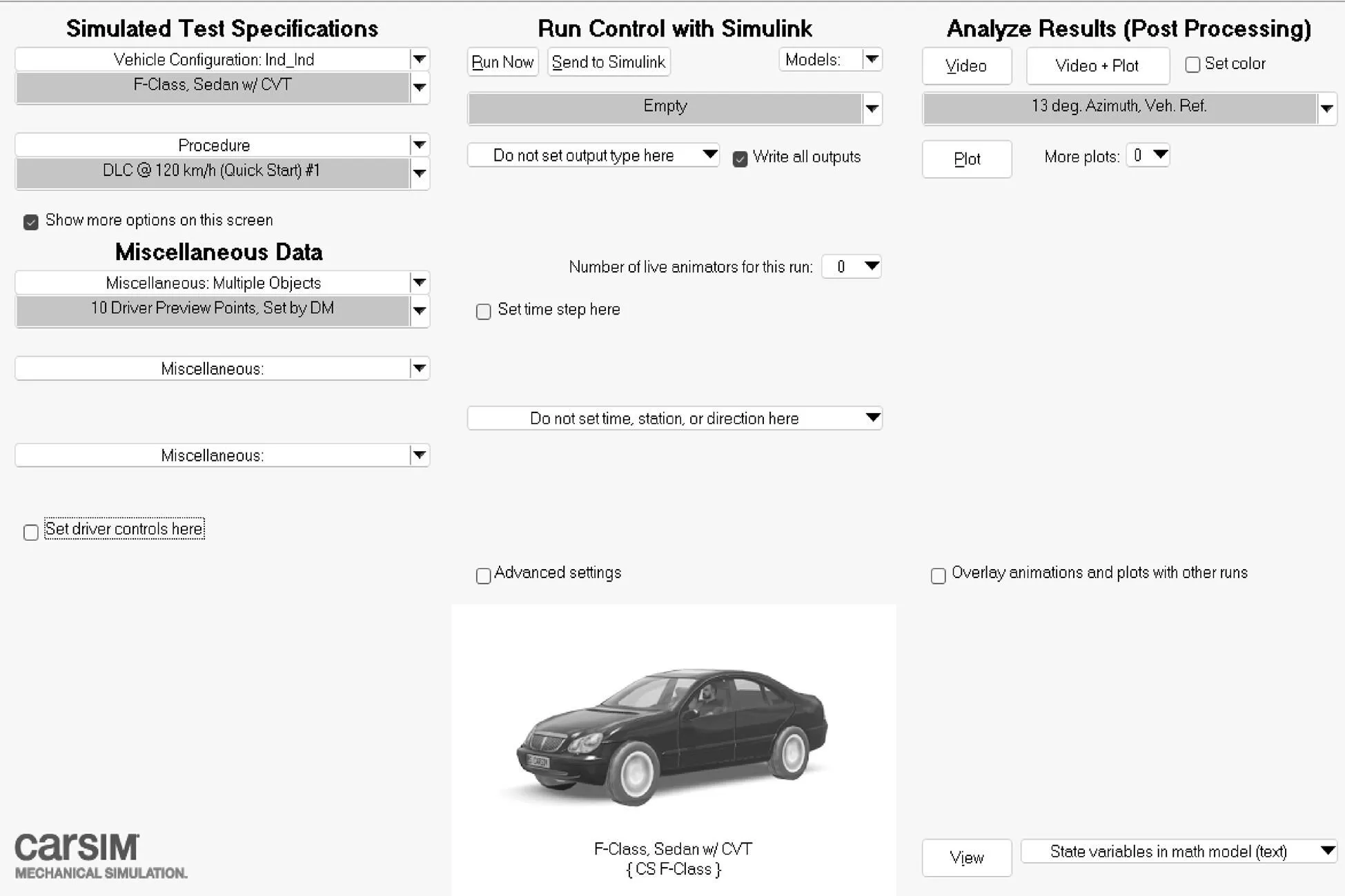
圖3 CarSim整車主界面
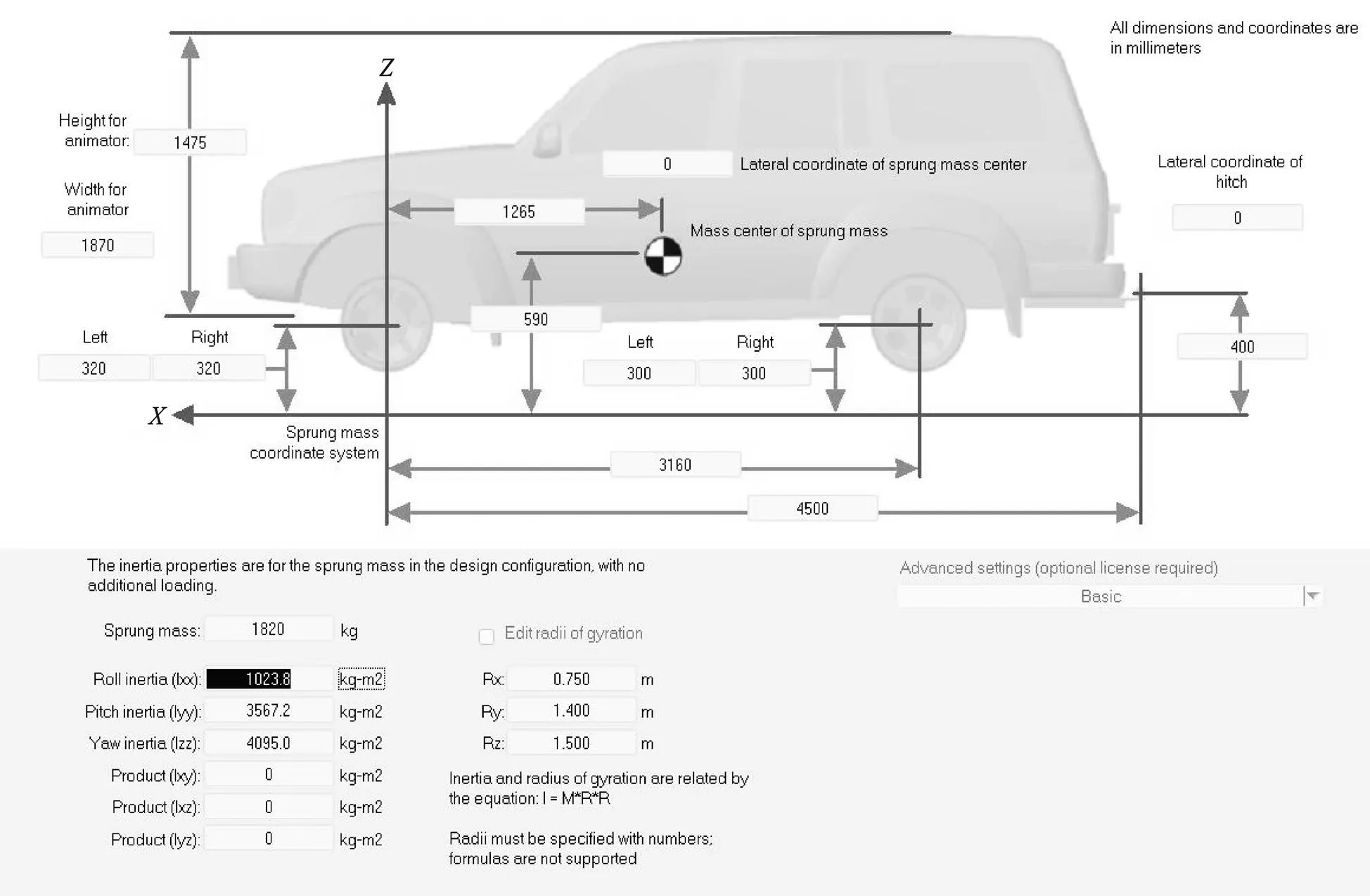
圖4 CarSim整車模型參數
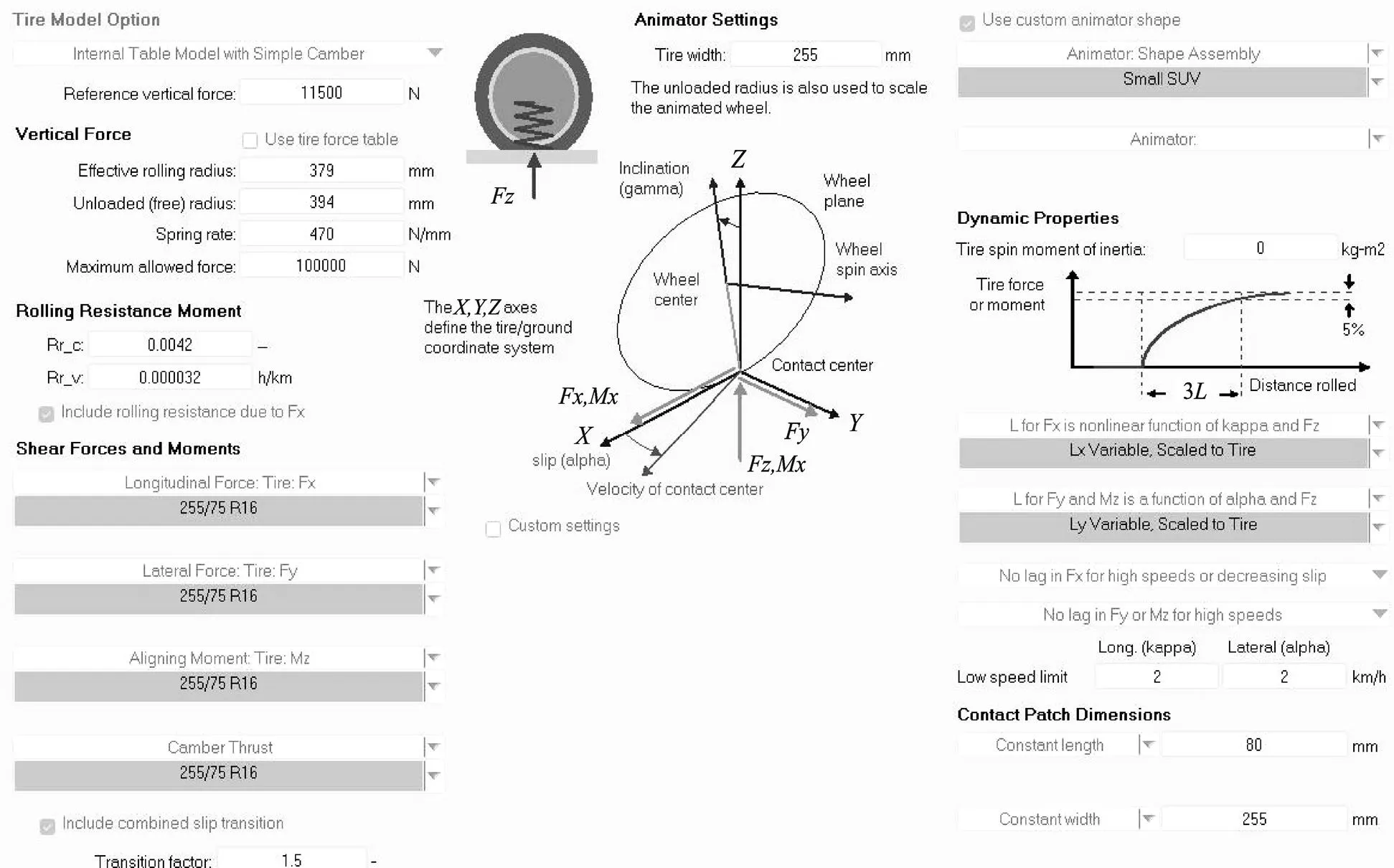
圖5 CarSim整車輪胎模型參數
4.2 Simulink/CarSim聯合仿真
聯合仿真的搭建過程會經歷三個階段。首先在 CarSim軟件中根據所研究的車輛方向建立車輛模型并進行相關參數設置。
接著利用MATLAB軟件的S-Function模塊,結合文中第3章部分的模型算法,建立線性時變模型控制器模塊。
最后,將CarSim設置的參數模型導入MATLAB軟件,同時將建立的算法模型在S-Function模塊中更新,之后在MATLAB/Simulink中搭建仿真框圖,運行程序觀測仿真結果。
4.3 仿真結果分析
在無人駕駛車輛行駛過程中,正常行駛路面的附著系數一般為0.7~1,濕滑路面附著系數一般為0.4左右。為保證仿真模擬的有效性,通過三種不同車速和路面附著系數的仿真工況進行驗證,分別觀測車輛行駛穩定性和控制精度與縱向行駛車速、路面附著系數之間的關系:工況一:=35 km/h,=0.7;工況二:=55 km/h,=0.7;工況三:=55 km/h,=0.4。
4.3.1工況一結果分析
由圖6和圖8仿真結果可知,橫向位置的跟蹤軌跡和期望軌跡在開始和結束階段貼合良好,但在車輛轉彎部分45~60 m、70~85 m范圍內,出現較小誤差,最大誤差為0.13 m;由圖7和圖8仿真結果可知,橫擺角跟蹤軌跡和期望軌跡在20~100 m范圍內出現輕微波動,最大誤差為4°,處于可控范圍內,車輛行駛穩定。
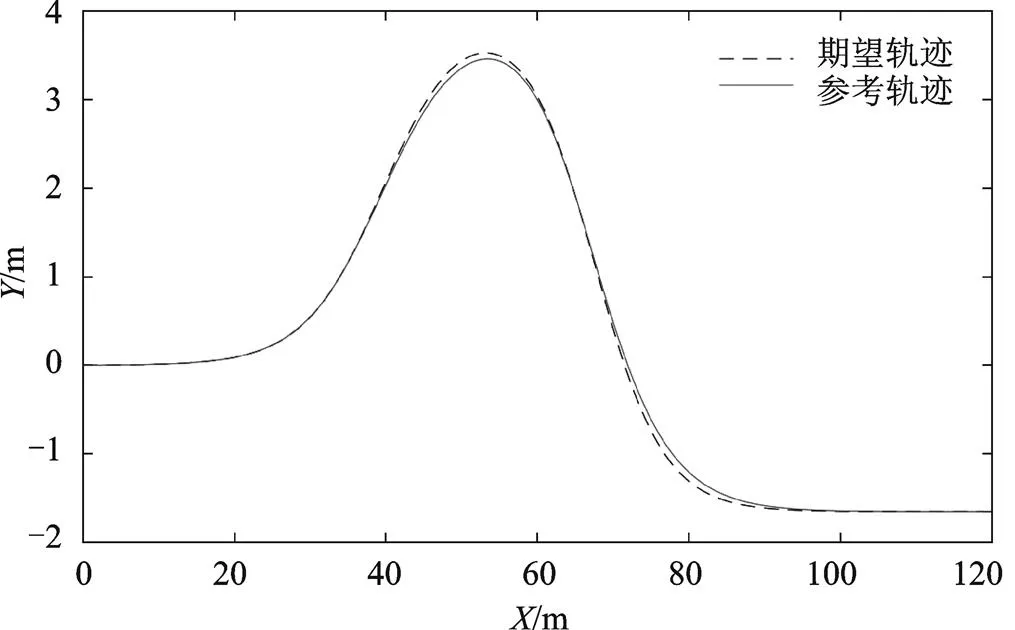
圖6 橫向位置軌跡跟蹤對比圖
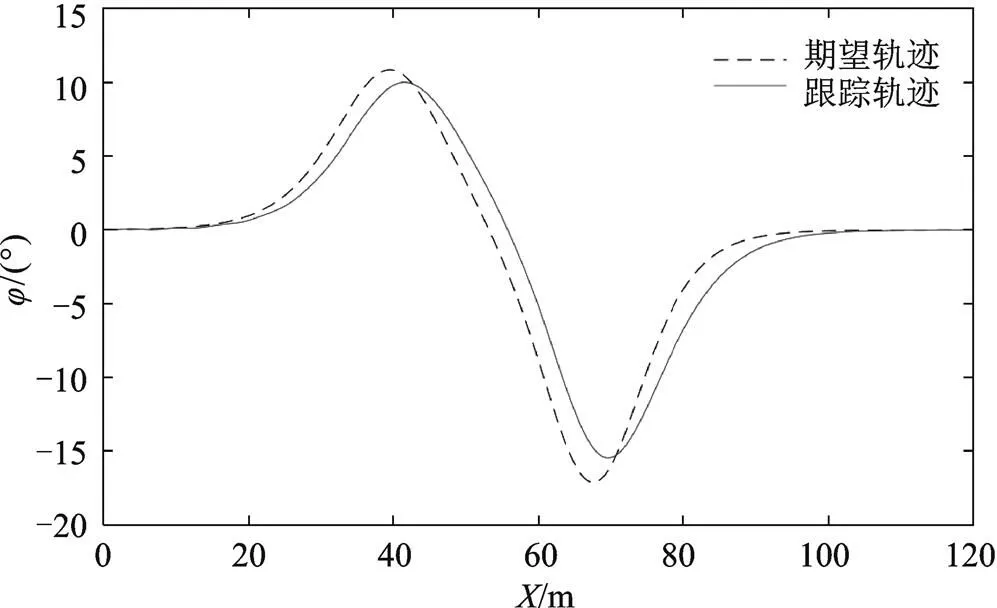
圖7 橫擺角軌跡跟蹤對比圖
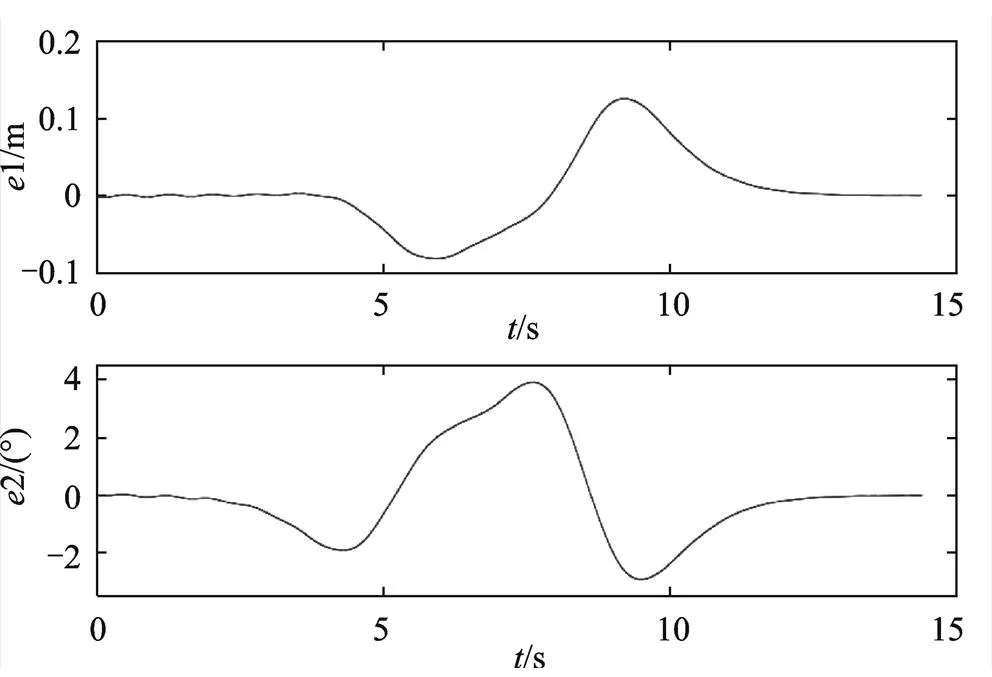
圖8 橫向位置和橫擺角誤差隨時間變化關系圖
4.3.2工況二結果分析
由結果可知,橫向位置的跟蹤軌跡和期望軌跡在開始和結束階段表現良好,在車輛轉彎部分45~60 m、65~90 m 范圍內出現較小誤差,最大誤差為0.14 m,如圖9所示;由圖10和圖11仿真結果可知,橫擺角跟蹤軌跡和期望軌跡在15~ 95 m范圍內出現微小波動,最大誤差為2.8°,橫向位置軌跡較工況一誤差增大0.01 m,橫擺角軌跡較工況一誤差降低1.2°,仍在可控范圍內,車輛行駛穩定。
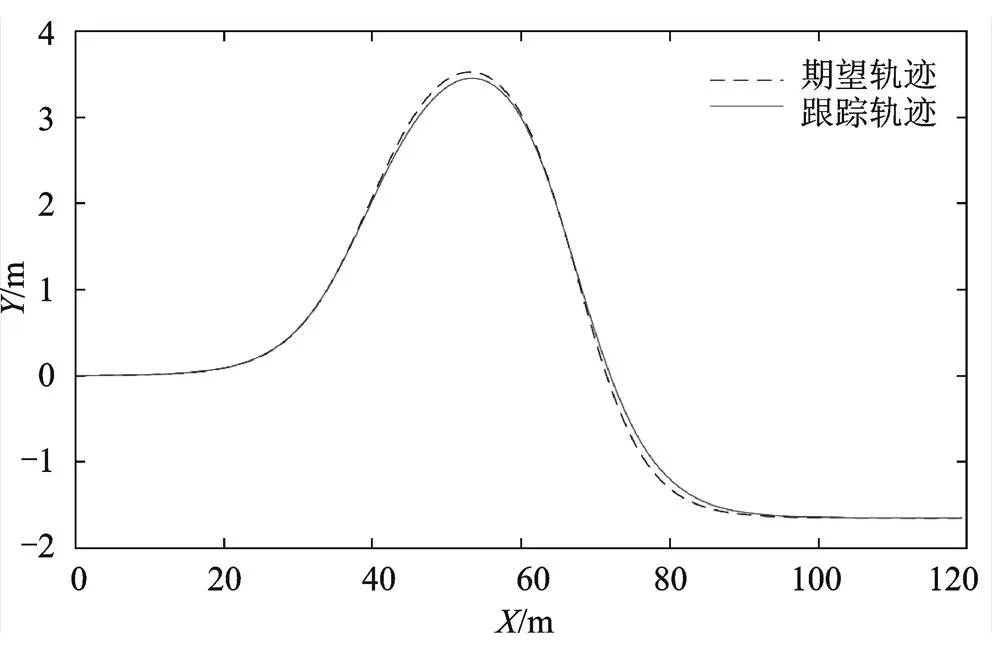
圖9 橫向位置軌跡跟蹤對比圖
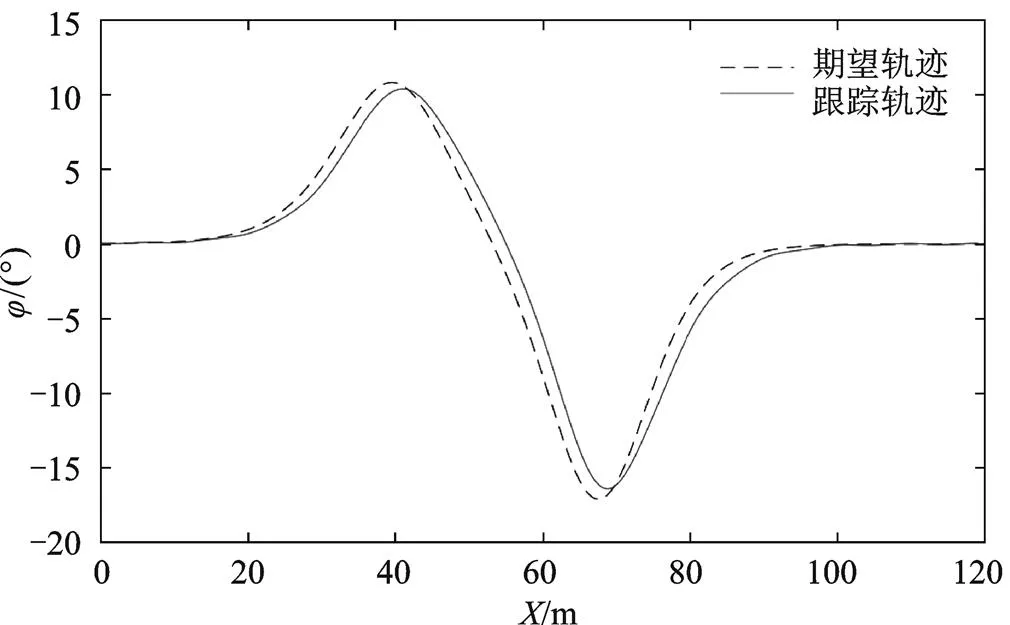
圖10 橫擺角軌跡跟蹤對比圖

圖11 橫向位置和橫擺角誤差隨時間變化關系圖
4.3.3工況三結果分析
由圖12—圖14仿真結果可知,橫向位置的跟蹤軌跡和期望軌跡在開始階段表現良好,在車輛轉彎部分40~75 m范圍內出現較小誤差,75~120 m出現較大誤差,最大誤差為1.02 m;由圖10和圖11仿真結果可知,橫擺角跟蹤軌跡和期望軌跡在15~60 m范圍內出現微小波動,在60~120 m范圍內出現較大波動,最大誤差為10.1°,橫向位置軌跡較工況二誤差增大0.88 m,橫擺角軌跡較工況二誤差增加8.9°,車輛行駛不穩定,易發生側滑等危險工況。

圖12 橫向位置軌跡跟蹤對比圖
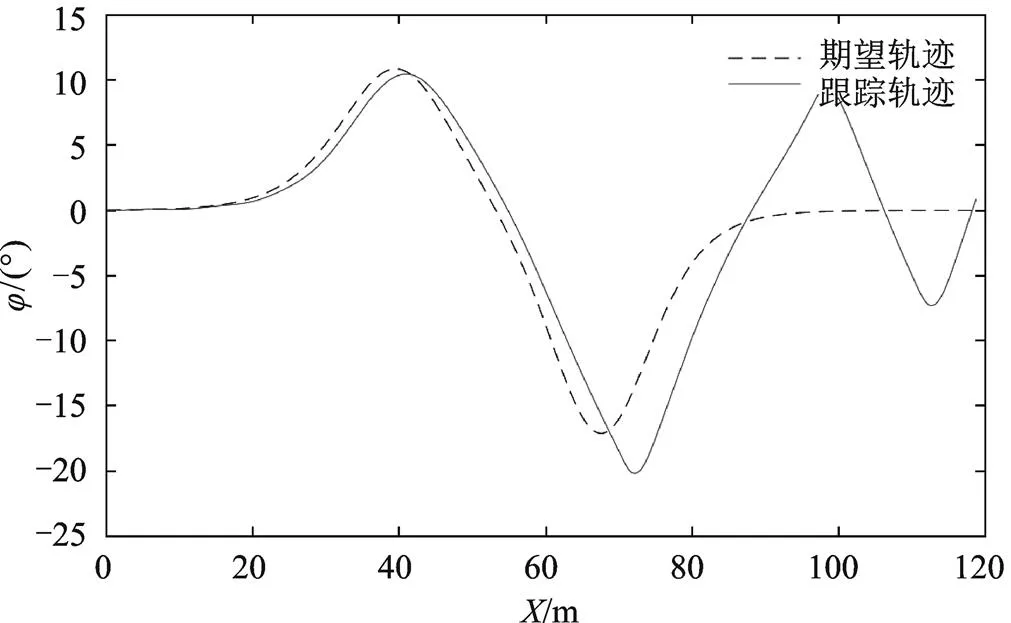
圖13 橫擺角軌跡跟蹤對比圖
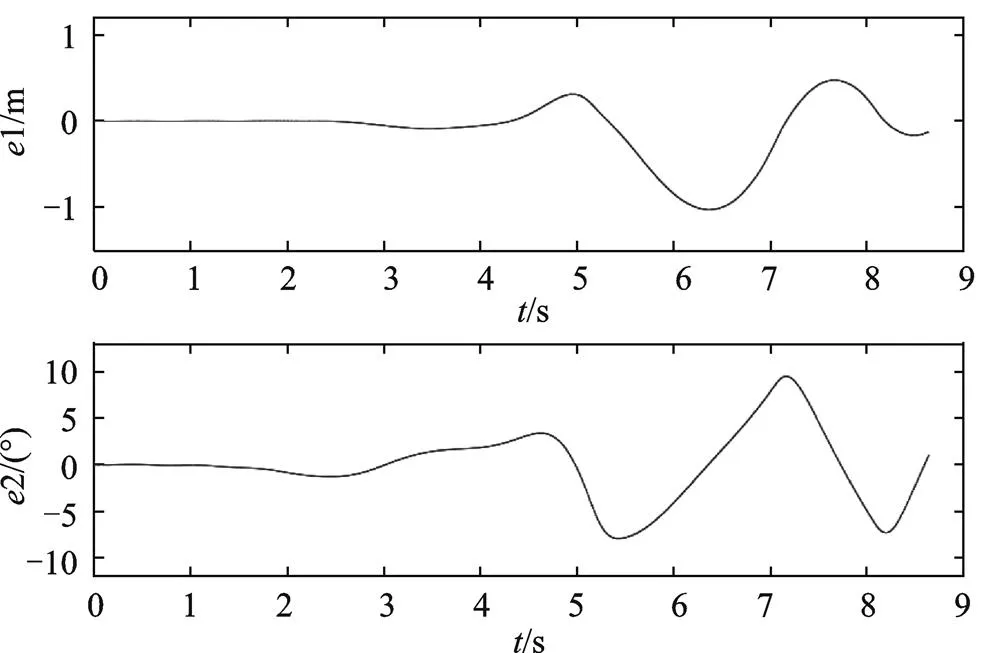
圖14 橫向位置和橫擺角誤差隨時間變化關系圖
5 總結
結合上述三種工況的仿真模擬,可以發現在車輛行駛過程中,隨著車輛縱向行駛速度的增大或路面附著系數的降低,構建的軌跡跟蹤控制器的跟蹤誤差也在不斷增大,此時車輛就會不可避免發生行駛不穩定,易發生方向失控、側滑等危險工況。
此外,經多次Simulink仿真實驗結果可知,軌跡跟蹤控制器的最高安全縱向行駛速度為 68 km/h,當車輛行駛速度超過該值時,跟蹤軌跡明顯偏離期望軌跡,誤差急劇增大,車輛處于極不穩定行駛工況。
[1] 姜巖,陳慧巖,熊光明,等.無人駕駛汽車概論[M].北京:北京理工大學出版社,2014.
[2] 趙禹程,張永偉,俞喬.無人駕駛汽車發展史?技術現狀與創新管理模式研究[J].新疆師范大學學報(哲學社會科學版),2021,42(4):103-112.
[3] 余世全.無人駕駛汽車的發展現狀和相關建議[J].專用汽車,2023(1):11-14.
[4] 姜巖,趙熙俊,龔建偉,等.簡單城市環境下地面無人駕駛系統的設計研究[J].機械工程學報,2012,48(20): 103-112.
[5] 李培新,姜小燕,魏燕定,等.基于跟蹤誤差模型的自動駕駛車輛預測控制方法[J].農業機械學報,2017 (10):351-357.
[6] 龔建偉,姜巖,徐威.無人駕駛車輛模型預測控制[M].北京:北京理工大學,2014.
[7] 鄒凱,蔡英鳳,陳龍,等.基于增量線性模型預測控制的無人車軌跡跟蹤方法[J].汽車技術,2019(10):1-7.
[8] 孫銀健.基于模型預測控制的無人駕駛車輛軌跡跟蹤控制算法研究[D].北京:北京理工大學,2015.
[9] 明廷友.智能汽車的軌跡跟隨控制研究[D].長春:吉林大學,2016.
Research on Trajectory Optimization of Driverless Vehicles
YU Yang, XU Changzhao, WANG Zhao, HAN Da, ZHANG Kun
( Shandong Huayu University of Technology, Dezhou 253000, China )
This paper focuses on the trajectory tracking problem of unmanned vehicles. On the basis of selecting model predictive control theory as the theoretical basis of this study, firstly set the front wheel angle of the vehicle as the corresponding control quantity, and set the lateral position and yaw angle of the vehicle as the state quantity to establish the three-degree-of-freedom dynamic model of the vehicle. Then, combined with the magic tire formula, in order to ensure the accuracy and effectiveness of the model, the existing model is linearized and discretized to complete the preliminary conception of the prediction model. On this basis, the relaxation factor and soft constraint are added to complete the establishment of the incremental linear time-varying model trajectory. After the model optimization is completed,it is verified through the Simulink/CarSim joint simulation platform.By setting different simulation conditions, simulated the complex working conditions encountered by the driverless vehicle as much as possible. After several simulation experiments, the trajectory tracking controller designed in this paper is under good road conditions. The maximum safe longitudinal driving speed is 68 km/h, which provides a data basis for subsequent in-depth research on driverless vehicles.
Driverless vehicles;Model predictive control;Trajectory tracking optimization;Simulink/CarSim co-simulation
U495
A
1671-7988(2023)11-49-08
于洋(1989-),男,在職碩士研究生,工程師,研究方向為新能源汽車動力電池,E-mail:jsanjian@sina.com。
依托山東華宇工學院德州市電動汽車動力控制與調試重點實驗室(6)。
10.16638/j.cnki.1671-7988.2023.011.009
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
