ROV推進器非線性控制研究*
2023-06-05 00:49:52閆忠鵬
艦船電子工程 2023年1期
關鍵詞:規(guī)則
閆忠鵬
(沈陽化工大學 沈陽 110000)
1 引言
海洋,不僅是人類文明的發(fā)祥地,而且蘊藏豐富的資源[1]。ROV 作為其中一種水下機器人,人們能通過它來進行水下作業(yè),例如:海底探索、水下營救、海下工程修復等,它能完成深海環(huán)境中高負荷、高壓、高精度工作。而ROV 動力系統(tǒng)是整個機器人的核心,控制ROV運動的航速以及轉(zhuǎn)向[2]。水下電動推進器由電機、減速器、螺旋槳和導流罩以及控制電路組成,優(yōu)點有動力轉(zhuǎn)換效率高、安裝便捷、維護方便、高集成度、適用廣泛等。而水下電動推進器的控制技術,一直是水下機器人更為重要的關鍵。本文研究水下推進器以直流電機調(diào)速參數(shù)為控制,工業(yè)上該控制系統(tǒng)一般控制方式多選取PID控制,PID 控制有著適用廣泛、算法簡單、控制性好、可靠性高等良好條件,多年來在控制領域依然占據(jù)重要位置。然而針對水下復雜環(huán)境和運動非線性變化,參數(shù)不能適時調(diào)整,自適應能力差,因此常規(guī)PID 控制作為調(diào)節(jié)器效果并不理想[3]。于是,本文設計提出一種非線性控制方法,加入模糊PID控制器,改善常規(guī)PID 的控制精度不足的問題,能夠?qū)崿F(xiàn)PID 參數(shù)動態(tài)調(diào)整,并能夠?qū)Σ杉男畔⑦M行實時優(yōu)化,快速調(diào)整穩(wěn)定系統(tǒng),保證推進器轉(zhuǎn)速維持在設定的范圍中,以解決ROV 推進器電機調(diào)速系統(tǒng)的控制問題。
2 非線性控制系統(tǒng)設計
2.1 原理分析
PID,比例-積分-微分控制器,從誕生至今依舊廣泛運用于工業(yè)控制中。PID 控制器通過計算期望值與測量值之間的差值,并用比例(P)、積分(I)以及微分(D)三個參數(shù)來進行校正[4]。PID屬于線性控制算法,通過定義計算設定值與實際值之差有以下表達式:
e(t)=r(t)-y(t)
現(xiàn)實生活中,被控對象并非是線性時不變系統(tǒng),對于常規(guī)的PID 只是一個線性控制器,然而模糊控制能解決被控對象的非線性問題,它結(jié)合PID控制能動態(tài)的調(diào)整參數(shù)。設計一個模糊PID 控制器,它通過模糊算法結(jié)合PID 算法,達到參數(shù)自整定的控制應用[5]。模糊PID 控制器主要通過PID 控制器、模糊控制器以及輸入輸出四個部分構成,通過模糊值來提高模糊控制器的穩(wěn)定度[6~7]。基于ROV 推進器電機,模糊控制器輸入端以轉(zhuǎn)速誤差e以及誤差變化率ec為接口,按照模糊知識庫對PID參數(shù)Kp、Ki、Kd 三個參數(shù)在不同時間進行調(diào)整,使得推機器電機保持在良好的動態(tài)以及靜態(tài)的穩(wěn)定下,最終獲得模糊PID控制器的結(jié)構如圖1所示。
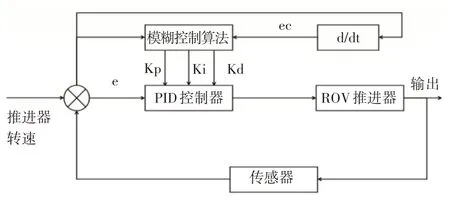
圖1 模糊PID控制器結(jié)構
2.2 控制器的設計
根據(jù)水下航行器模糊規(guī)則,水下航行器運動誤差和誤差變化率可以相互關聯(lián)以產(chǎn)生其它變量,即模糊PID控制器輸出Kp、Ki和Kd。
1)設定e(期望轉(zhuǎn)速與實際轉(zhuǎn)速值之差)以及ec(誤差變化率)為模糊控制器輸入值,選擇Kp、Ki、Kd為控制器的輸出端[8]。
2)將輸入以及輸出量模糊化處理,首先將輸入量e、ec 劃分為7 個模糊子集,分別為正大(PB)、正中(PM)、正小(PS)、零(ZO)、負小(NS)、負小(NM)、負大(NB)。同時將輸出量Kp、Ki、Kd 設定為相同的5 個模糊子集,對應的論域為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。根據(jù)專家經(jīng)驗或者操作人員實踐,ROV 推進器電機一般選擇三角形隸屬度函數(shù)如下公式(以誤差e 為例)來作為誤差以及誤差變化率的隸屬度函數(shù)。這種函數(shù)的優(yōu)點主要是結(jié)構簡單并且易于計算,而且在編程中也利于實現(xiàn)[9~10]。
3)模糊關系,通過模糊推理以及實驗數(shù)據(jù),于是建立比例Kp 的模糊規(guī)則控制表如表1、Ki 模糊控制規(guī)則表2以及Kd模糊控制規(guī)則表3。當誤差e是正大、誤差變化率ec 是正大的時候,反向加大比例項KP 以增快調(diào)節(jié)來較小上升的時間;當誤差是正值時,誤差變化率是負數(shù)的時候,應當降低比例項以防超調(diào)的情況發(fā)生;當誤差是負大時以及誤差變化率是正時,需要增大比例量;當誤差以及誤差變化率都是正數(shù)時,需要減小比例項防止出現(xiàn)大的誤差[11~12]。
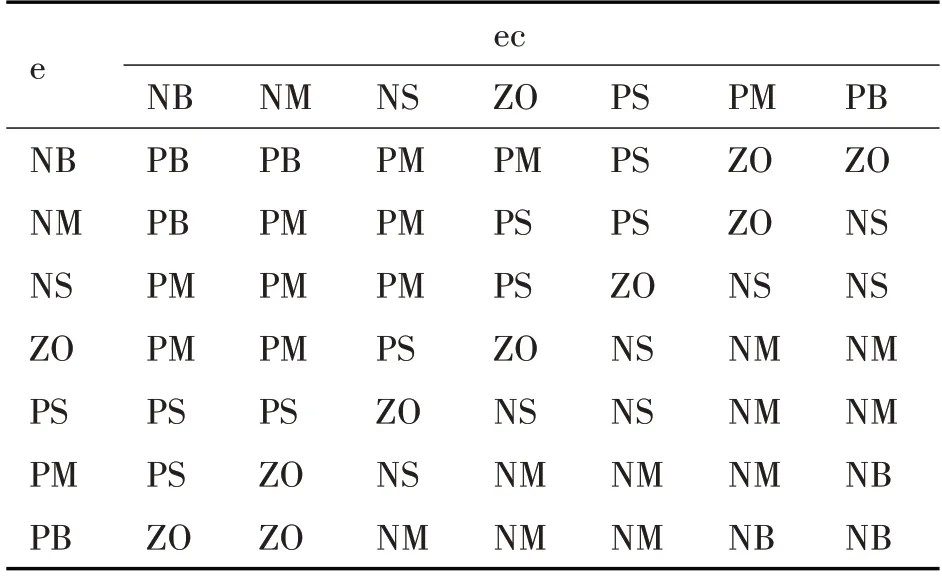
表1 Kp模糊控制規(guī)則表
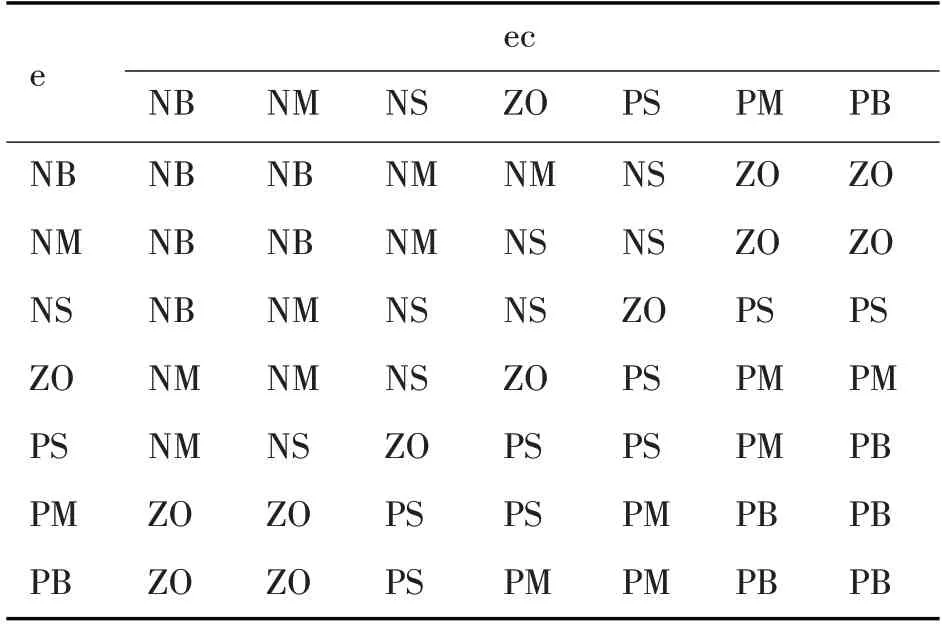
表2 Ki模糊控制規(guī)則表
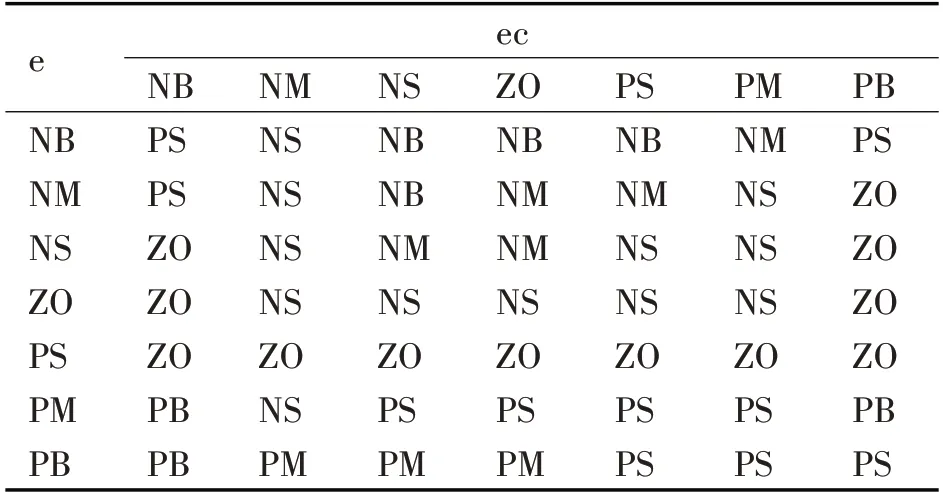
表3 Kd模糊控制規(guī)則表
3 系統(tǒng)建模
本文研究以ROV 推進器HPM153-1 型電動推進器為實驗對象,因此建立其數(shù)學模型。
1)ROV 推進器以無刷直流電機為主體,研究以推進器電機轉(zhuǎn)速調(diào)制,無刷直流電機無論換相機制多么復雜,電壓是控制電機轉(zhuǎn)速的主要因素,所以可建立以下推導:
公式定義:n 表示為電機轉(zhuǎn)速;Ud表示為電機額定的電壓;Id定義為電機額定的電流;Ra表示電樞電阻;公式中P電機為額定功率;ce為額定磁通下的電動勢系數(shù)。
接下來對電樞電流與電磁轉(zhuǎn)矩函數(shù),電機的反電動勢與電機轉(zhuǎn)速,負載轉(zhuǎn)矩定義如下:
該公式參數(shù)定義:Te表示為電磁轉(zhuǎn)矩;Cm表示為轉(zhuǎn)矩系數(shù);其中E 為電機的反電動勢。TL是負載轉(zhuǎn)矩;GD2是飛輪慣量(GD2=4gJ;J為轉(zhuǎn)動慣量)。
2)建立傳遞函數(shù)模型如下:
(3)電動勢與轉(zhuǎn)速的關系為
由此得到推進器電機系統(tǒng)傳遞函數(shù)如下:
完成對數(shù)學模型一系列推到,于是建立系統(tǒng)傳遞函數(shù)模型如圖2。
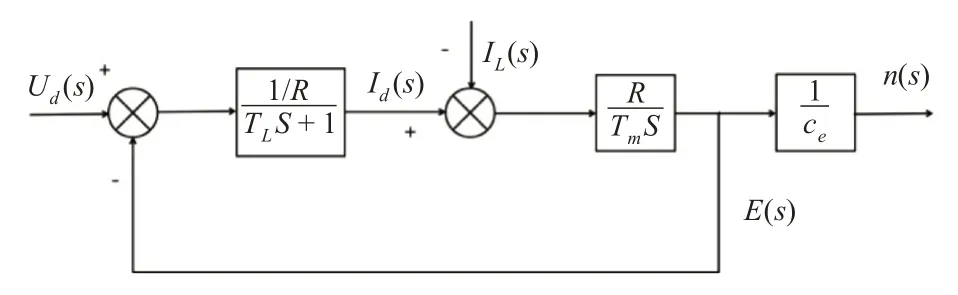
圖2 系統(tǒng)傳遞函數(shù)模型
4 基于Matlab非線性控制系統(tǒng)仿真
4.1 模糊控制器Matlab設計
當設計好模糊控制器后,通過Matlab軟件進行仿真實驗測試。模糊控制器采用Matlab 的模糊邏輯控制箱功能(Fuzzy)進行仿真操作。首先打開Matlab 軟件,在命令行輸入“fuzzy”,將自動彈出一個模糊控制器設計頁面FIS,然后添加三個輸入量、兩個輸出、選擇合適的隸屬度函數(shù)[13]。
其次點擊規(guī)則編輯器,按照第三節(jié)Kp,Ki,Kd的模糊控制規(guī)則表將其轉(zhuǎn)換成編輯器所用的關系語句,例如:
If(e is NB)and(ec is NB)then(Kp is PB)and(Ki is PB)and(Kd is PB);
…(省47)
If(e is PB)and(ec is PS)then(Kp is NB)and(Ki is PB)and(Kd is PS)
4.2 控制系統(tǒng)仿真
本文研究以ROV 推進器HPM153-1 型電動推進器為實驗對象,旨在通過對ROV 推進器電機實施有效控制來提升ROV運動性能。
為了證實ROV 推進器電機控制方法的有效性,以Matlab-Simulink軟件為實驗平臺搭建非線性系統(tǒng)控制仿真模型,如圖3所示。
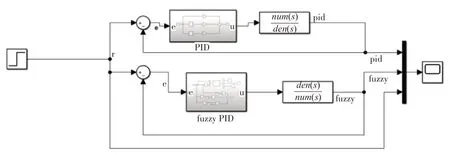
圖3 非線性控制系統(tǒng)模型
1)控制性能比較
仿真搭建好之后測試,首先設置仿真時間為0.3s,設定轉(zhuǎn)速為1.0Krpm,在單PID 控制環(huán)節(jié)設定參數(shù)p=6,i=0.4,d=0.8。PID與模糊PID仿真控制性能圖如圖4所示。
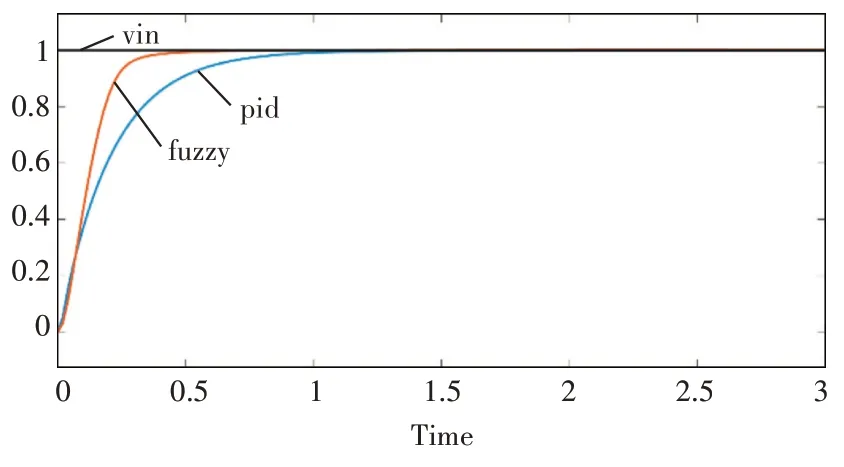
圖4 控制性能對比圖
2)抗干擾性能比較
為了測試該方法在出現(xiàn)干擾的情況下穩(wěn)定性。在0.1s時刻加入一個階躍信號,將轉(zhuǎn)速驟升至1.2Krpm,如圖5所示。
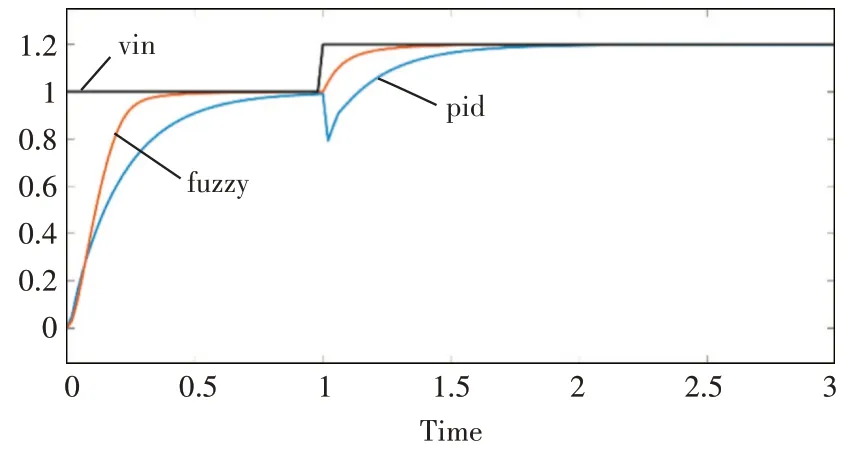
圖5 抗干擾性能對比圖
由圖4和圖5可以直觀地看出,在推進器電機控制上模糊PID 控制時間明顯要短于單PID 控制,并且在0.1s 時刻加入干擾信號,常規(guī)單PID 控制轉(zhuǎn)速有所回落,而加了模糊控制明顯能抗干擾。綜上所訴,模糊PID 控制相比較于常規(guī)的PID 控制器,ROV 推進器電機轉(zhuǎn)速能更好地響應速度,動態(tài)性能優(yōu)越,并且在超調(diào)量上能顯著的改善,使得該系統(tǒng)達到穩(wěn)定的時間明顯要縮短,并且模糊PID 控制有比較好的抗干擾能力。
5 結(jié)語
ROV 對于探索海洋有著十分重要的意義,因此提升ROV 推進器的控制性能非常關鍵,而對于ROV 推進器轉(zhuǎn)速這一參數(shù),本文提出設計這一非線性控制系統(tǒng)。其目的在于通過轉(zhuǎn)速控制將推進器分配輸出推力與實際輸出推力一一對應。
1)單PID 控制在遇到非線性、時變、耦合的被控對象時,出現(xiàn)了超調(diào)量大、不穩(wěn)定、過渡時間較長的缺點,而對比來說模糊PID 控制能克服這一不足,控制效果明顯優(yōu)于它。
2)通過建立ROV 電動推進器電機控制系統(tǒng)的PID 控制與模糊控制數(shù)學模型,使得推進器可以更好地適應復雜的水下環(huán)境,并且通過動態(tài)調(diào)整推進器電機轉(zhuǎn)速,改善了ROV 的運動情況,優(yōu)化了ROV的適應性。
3)通過仿真軟件實驗可知ROV 電動推進器電機轉(zhuǎn)速控制響應曲線,對響應曲線分析,對控制對象有很好的調(diào)節(jié),為推機器控制對象優(yōu)化給予支持。
猜你喜歡
作文周刊·小學一年級版(2022年28期)2022-05-30 10:48:04
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
法律方法(2019年3期)2019-09-11 06:26:16
中國外匯(2019年7期)2019-07-13 05:44:52
幸福(2018年33期)2018-12-05 05:22:42
環(huán)球飛行(2018年7期)2018-06-27 07:26:14
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
運動(2016年6期)2016-12-01 06:33:42