一種基于圖像處理的水下小目標航跡自動跟蹤方法*
2023-06-05 00:49:50金巧園代中華張國超
艦船電子工程 2023年1期
關鍵詞:檢測
程 雨 金巧園 代中華 張國超
(中國船舶集團有限公司第七二六研究所 上海 201108)
1 引言
近年來,隨著世界各國對水下攻防日益重視,兼具攻擊性和隱匿性的無人潛航器、蛙人、魚雷等各類小型水下武器飛速發展。水下武器能夠摧毀艦艇、岸基,對國民財產和安全構成很大威脅[1]。因此,針對水下小目標的探測、跟蹤、預警成為水下攻防的另一重點研究方向。
由于電磁波在水中會迅速衰減,水下小目標的探測主要依靠聲波信號。聲納是一種利用聲波在水中傳播和反射特性,通過電聲轉換和信號處理技術對水下目標進行探測的裝置。基于被動聲納的水下監控系統能夠實時監測當前水域,探測、處理水下目標的輻射噪聲,發現并持續關注目標,通過向用戶發出預警信號,為水下攻防贏得寶貴的準備時間。傳統的水下監控系統依賴人工參與,需要值班人員集中精力觀察界面是否出現異常,長時間工作時精力難以集中,容易發生漏報誤報。
為減輕水下監控系統操作人員的工作強度,本文以被動聲納輸出的序列數據為研究對象,從圖像處理角度提出一種水下小目標航跡自動跟蹤方法,通過對聲納序列歷程圖像進行預處理、初始航跡檢測、航跡跟蹤等操作,實現聲納觀測范圍內水下小目標航跡的自動跟蹤。
2 方法
2.1 預處理
水下監控系統的實際應用場景中,水文環境復雜,聲納接收到的聲信號中不僅有水下目標,還包含水面航船、魚群以及一些隨機干擾噪聲信號。這些背景噪聲會對聲納產生干擾,使我們真正關注的水下小目標信號淹沒其中。
圖1是根據聲納輸出的序列數據生成的歷程圖像,橫軸表示角度,縱軸表示時間,左下角為坐標原點,星號標出的是本文要跟蹤的水下小目標航跡。圖中存在的環境噪聲和其他目標航跡,會對后續航跡檢測、跟蹤產生不利影響,因此,首先要對聲納歷程圖進行預處理,減少干擾。具體處理方法如下。

圖1 聲納序列數據歷程圖像
1)頂帽變換
頂帽變換是用原始圖像減去該圖像的開運算結果,數學描述如式(1)所示。通過選擇結構元素的類型和大小,可以實現特定結構的提取[2]。
其中,f表示原始圖像,S表示結構元素,° 表示形態學開運算算子。
本應用場景下,聲納接收到的目標信號在歷程圖上表現為暗背景下的亮軌跡。本文選擇圓盤作為結構元素,效果如圖2所示。綜合考慮,結構元素大小選擇2。頂帽變換操作可以濾除一些干擾對象,同時保留關注目標的信號。對比圖2(a)、(c)可知,原始圖像中水面船只引入的噪聲被有效濾除。
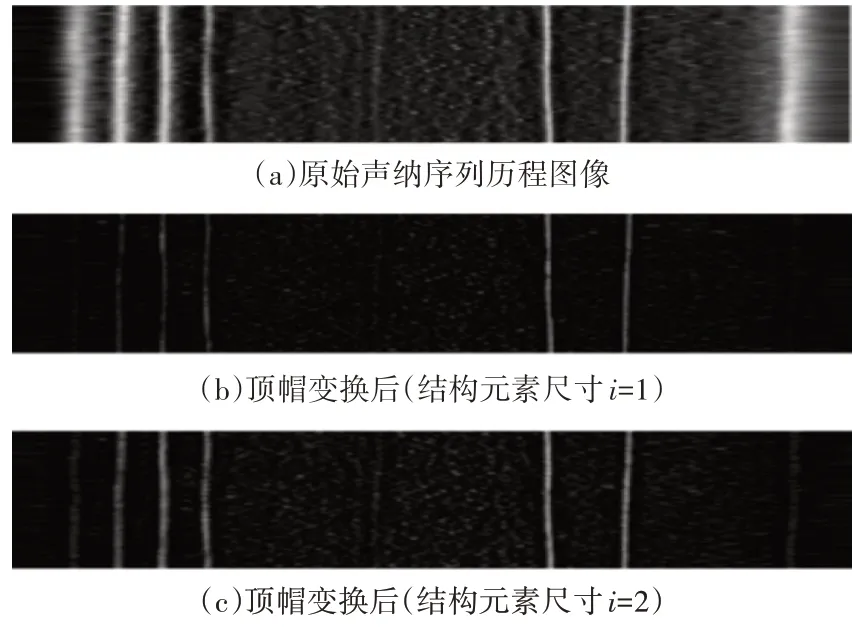
圖2 頂帽變換效果對比圖
2)二值化
二值化[3]是圖像分割的一種方法,通過選取閾值H,將原始圖像中灰度大于這個臨界值的點賦值255,反之賦0值,最終得到一幅黑白兩色的二值圖像,數學描述如式(2)所示。
通過評估當前水域的環境噪聲水平,可以得到分割閾值H,進而將目標信號與背景環境噪聲分離開。圖3是圖2對應時間段的聲納能量序列歷程圖像,其中橫軸表示探測角度,縱軸表示時間,像素點灰度值表示聲納探測信號的能量強度。

圖3 聲納能量歷程圖
統計聲納能量歷程圖的直方圖,結果如圖4所示,其中縱軸表示該能量區間的像素數量。根據經驗,我們認為背景環境噪聲是圖像中數量最多的像素,能量強度很低但不為0。因此,在前5 個等級中,選取出現頻率最大的非零能量強度Enoise作為背景環境噪聲級。
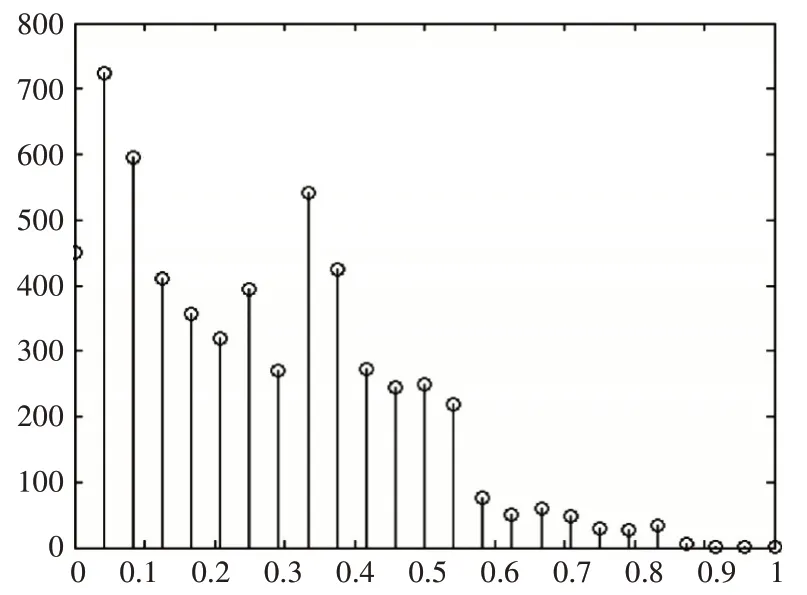
圖4 能量強度直方圖(level=25)
本應用場景下,以Enoise作為全局閾值,對頂帽變換后的探測歷程圖二值化,將目標前景和背景噪聲分割開。效果如圖5所示,可見,前景中除了目標軌跡還夾雜著較多細小噪聲。

圖5 二值化效果圖
3)形態學濾波
形態學開運算是個基于幾何運算的濾波器,通過利用結構元素,對圖像先腐蝕后膨脹,消除前景中小物體的同時,平滑大物體邊界且不改變其面積。數學描述如式(3)所示。
其中f 表示原始圖像,S 表示結構元素,“°”、“Θ”、“⊕”分別表示開運算、腐蝕和膨脹算子。
本應用場景下,對探測歷程二值圖像進行形態學開運算操作,去噪效果如圖6所示。與原始圖像圖2(a)相比,前景中的大部分干擾都已被消除。

圖6 形態學濾波去噪效果圖
2.2 初始航跡檢測
真正的威脅目標往往是突然出現的,而持續存在的目標威脅等級通常很低。這些長期存在于探測環境中的目標,可稱之為“背景目標”。為了方便區分背景目標航跡和突現目標航跡,我們需要在水下監控系統剛開機、搭載平臺進行大幅度機動等探測環境發生較大變化的情況下,對當前水域進行一段時間的背景學習,檢測背景目標產生的初始航跡。
霍夫變換[3]是一種經典的檢測直線、圓等可參數化描述的簡單幾何形狀的算法,它通過式(4),將笛卡爾坐標系一條直線上的觀測數據()x,y 映射為霍夫空間中的極坐標點()ρ,θ,實現“點線轉換”,在此基礎上引入累加投票機制,即可實現對指定形狀的檢測[4~5]。
本應用場景下,對預處理后的探測歷程圖,利用霍夫變換檢測初始航跡,效果如圖7所示,可以看出,當前水域中有效背景目標的初始航跡基本都被檢測出。

圖7 霍夫變換檢測效果
2.3 航跡跟蹤
航跡是目標觀測的集合。本節以T+1 時刻為例,通過一些目標檢測方法,獲取目標的最新觀測。首先對過去一段時間內的聲納歷程圖預處理,初步提取當前時刻的m′個目標檢測點;接下來通過設置能量信噪差閾值E,找出當前時刻聲納探測能量數據的局部極大值,最終得到m 個(m≤m′)目標檢測點。
航跡跟蹤[6~8]是對觀測建立內部聯系的過程,包括航跡起始、航跡更新、航跡終止。
1)航跡起始
航跡起始是航跡跟蹤的第一步,其任務是建立目標航跡。
初始航跡的時間跨度小,可近似為直線,將其抽象為兩個端點,建立起n 條起始航跡。后續通過檢測獲取目標觀測,當觀測遠離現有航跡且無法與任意航跡匹配時,按孤立點跡處理,并將它作為某條新增航跡的頭,如果后續有觀測與之成功匹配,則認為該航跡正式起始。
2)航跡更新
航跡更新是對航跡動態管理的過程,包括航跡的預測、擬合和數據關聯。
目標航跡G(t)由多個時刻的位置觀測F(x),x=1,2,..,t 組成,航跡預測是指利用歷史觀測信息,推測目標在下一周期的位置P(t+1)。如果航跡中真實目標觀測少于M 個,認為可靠性低,故在預測該航跡下一周期的位置時,保守地假設角度不變。當航跡中包括M 個及以上的真實目標觀測時,認為該航跡可靠,可以依據歷史觀測信息預測目標后續的位置。
航跡擬合[9~10]是指擬合航跡的歷史觀測。水下小目標的運動特性可用式(5)的二階多項式表征,在此基礎上利用最小二乘算法對航跡歷史觀測數據做擬合,可求出二階多項式參數,從而間接獲取目標的運動速度和方向等信息;考慮到目標運動具有連續性,其位置和運動方向在相鄰聲納輸出周期內不會突變,故在此基礎上可預測該航跡在下一周期的位置外推值。
這是個二階多項式擬合模型,其中b0、b1、b2分別表示位移、速度、加速度相關的運動參數。
數據關聯是指在前端檢測模塊給出目標最新位置觀測的基礎上,將觀測與現有航跡進行匹配。基于探測環境未發生較大變化的假設,目標位置、運動方向和反射信號能量強度在相鄰聲納輸出周期不會發生突變,因此在數據關聯時,可以引入距離約束和能量約束。
通過檢測T 時間內的聲納探測歷程數據,得到n 條初始航跡,即{G1(T),G2(T),…,Gn(T)};通過航跡預測,得到n 個T+1 時刻目標位置外推值{P1(T+1),P2(T+1),…,Pn(T+1)};通過檢測T+1 時刻的聲納探測數據,得到m 個目標位置觀測{F1(T+1),F2(T+1),…,Fm(T+1)}。計算航跡外推值和最新目標觀測值之間的歐式距離,建立起一個n×m維的距離矩陣,并在此基礎上進行數據關聯[11~12]。數據關聯算法的整體流程如下:
輸入:當前時刻所有目標位置觀測{Fi(t),i=1,2,…,m};
現有航跡G(t-1)的位置外推值{Pj(t),j=1,2,…,n};
輸出:更新后的航跡G(t);
遍歷前一時刻的所有航跡G(t-1);
遍歷當前時刻所有目標位置觀測F(t);
計算航跡外推值以及目標位置觀測值與航跡外推值的歐式距離disti,j;
如果disti,j>distMin (distMin 為最小距離閾值),跳過;
否則,記錄滿足空間距離要求的目標觀測;計算滿足空間距離要求的目標觀測數量Q;
如果Q=0,用外推值Pj(t)作為當前觀測,進行航跡更新;
如果Q=1,用觀測Fi(t)對當前航跡進行更新;
如果Q>1,選擇其中與航跡外推值Pj(t)能量值最接近的觀測,對當前航跡進行更新;
遍歷當前時刻所有目標位置觀測F(t);
如果未與現有航跡成功關聯,且與所有外推值的距離大于distMin,則增加一條臨時航跡,并將該觀測作為新增航跡的起始點;
3)航跡終止
當航跡可靠性較低時,及時終止航跡可以避免出現誤報。以下幾種情況,需要終止航跡。
(1)航跡預測過程中,使用二階多項式模型擬合航跡歷史數據,并預測下一周期的位置外推值。如果位置外推值與航跡最新位置相距較遠,則航跡終止。
(2)數據關聯過程中,每次使用外推值代替目標觀測進行更新時,航跡的置信度都會下降。如果連續N個周期都未與目標觀測成功關聯,則航跡終止。
3 實驗
3.1 效果展示
為驗證本文所提方法的有效性,按時間順序對圖1中的聲納序列數據進行處理,文中提及的各參數設置如下:背景學習周期T=20,目標觀測個數M=3,能量信噪差E=5dB,外推周期N=5,最小距離閾值distMin=4。航跡跟蹤效果如圖8(a)所示,其中,同一種顏色標繪的連續曲線表示同一航跡,每條航跡的起點和終點都用白色“x”號標注出來。圖8(b)在原始航跡跟蹤結果基礎上,剔除了從開始時刻就存在于背景環境中的初始目標航跡,只保留威脅等級高的突現目標。本文方法不僅實現了特定水下小目標航跡的完整跟蹤,且沒有出現虛警。

圖8 航跡跟蹤效果
3.2 對比實驗
1)圖像預處理
預處理環節,起到的是降低噪聲、減少干擾的作用。圖9展示了有無預處理環節條件下航跡跟蹤的結果,可以看到,去掉預處理步驟后,雖然實現了特定目標的航跡跟蹤,但在原有基礎上增加了10 條無效航跡,該對比實驗證明了圖像預處理環節的有效性和必要性。

圖9 預處理環節的影響
2)能量信噪差
設置能量信噪差閾值,是為了在目標檢測時進一步剔除觀測中存在的噪聲,增加航跡的可靠性。圖10展示了設置與未設置能量信噪差條件下航跡跟蹤的結果,可以看到,通過設置能量信噪差閾值,減少了很多虛警,證明了本文所提方法的有效性。
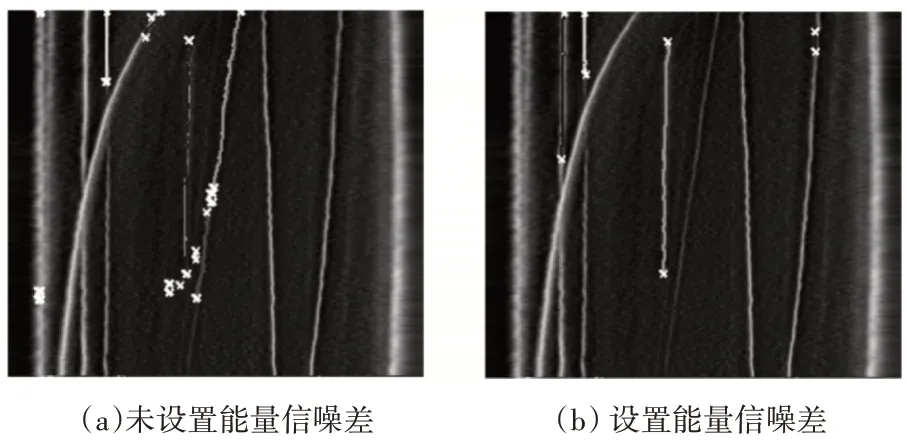
圖10 能量信噪差閾值的影響
4 結語
本文從圖像處理的角度,提出一種水下小目標航跡自動跟蹤方法。該方法能夠依據聲納輸出的序列數據,實時、自動地跟蹤重點目標航跡,其有效性在真實數據上得到了證實。不過方法仍存在不足,后續需要圍繞以下幾點進行改進:
1)針對多條航跡交匯點附近會出現匹配失敗的問題,要通過加強約束來優化數據關聯過程;
2)在將來的研究中,可通過進一步挖掘水下小目標的其他圖像特征、結合綜合態勢信息來提升航跡自動跟蹤性能。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48