基于PINNs的單旋翼植保無人機下洗流場預測模型
2023-05-15 05:33:40蘭玉彬張海艷尹選春張建桃
農業工程學報 2023年6期
王 濤,文 晟,3,蘭玉彬,張海艷,尹選春,3,張建桃
·農業航空工程·
基于PINNs的單旋翼植保無人機下洗流場預測模型
王 濤1,文 晟1,3※,蘭玉彬2,3,張海艷4,尹選春1,3,張建桃3,5
(1. 華南農業大學工程學院,廣州 510642;2. 華南農業大學電子工程學院,廣州 510642;3. 國家精準農業航空施藥技術國際聯合研究中心,廣州 510642;4. 沈陽農業大學信息與電氣工程學院,沈陽 110161;5.華南農業大學數學與信息學院,廣州 510642)
植保無人機(unmanned aerial vehicle,UAV)進行噴施作業時,旋翼高速旋轉所產生的下洗流場是影響霧滴飄移的重要因素。為了快速準確地預測單旋翼植保無人機下洗流場的速度等流場參數,提升無人機精準施藥效果,該研究基于物理信息神經網絡(physics-informed neural networks,PINNs)構建了單旋翼植保無人機下洗流場的預測模型。在全連接神經網絡結構的基礎上,嵌入納維-斯托克斯(Navier-Stokes,-)方程作為物理學損失項來參與訓練,減輕網絡模型對數據依賴性的同時增強了模型的可解釋性。通過最小化損失函數,使得該模型學習到流場中流體的運動規律,得到時空坐標與速度信息等物理量之間的映射關系,從而實現對單旋翼無人機下洗流場的速度等參數的快速預測。最后通過風洞試驗驗證該預測模型的可行性和準確性。結果表明:沒有側風的情況下,預測模型在旋翼下方0.3、0.7、1.1以及1.5 m共4個不同高度處各向速度的預測值和試驗值的誤差均小于0.6 m/s,具有較小的差異性;不同側風風速情況下,水平和豎直方向速度的預測值與試驗值的總體擬合優度2分別為0.941和0.936,表明所提出的模型在單旋翼植保無人機下洗流場預測方面具有良好的應用效果,能夠快速準確地預測下洗流場的速度信息。研究結果可為進一步研究旋翼風場對霧滴沉積分布特性的影響機理提供數據支撐。
無人機;模型;神經網絡;下洗流場;單旋翼
0 引 言
植保無人機作為智慧農業的重要組成部分,憑借其作業效率高、質量好以及成本低等顯著特點,受到越來越廣泛的關注[1-2]。植保無人機噴施作業的最終目的是使所有藥液都可以沉積在目標區域內,通過農藥與作物之間的相互作用達到防治病蟲害的效果[3-4]。然而,在植保無人機實際進行施藥作業的時候,高速旋轉的旋翼產生的下洗風場會導致噴施的霧滴群向非靶標區域飄移(最遠飄移距離超過50 m),從而對環境造成較嚴重的次生危害[5-6]。因此,探究不同類型植保無人機旋翼風場分布特性并構建準確的無人機旋翼風場模型,一直是精準農業航空技術領域的研究重點之一[7]。
為了研究無人機旋翼風場的變化規律并探索其對霧滴沉積分布特性的影響機理,國內外科研工作者開展了大量的研究,主要包括田間試驗方法[8-11]、室內試驗方法[12-14]和數值模擬方法[15-17]。
由于田間試驗是在真實大田環境中進行,使得試驗數據能夠真實地反映當前環境條件下旋翼風場的實際分布特性。但另一方面,田間試驗存在較多的隨機因素使得試驗結果難以重復且無法獲取植保無人機旋翼風場整體形態[18]。室內試驗可以減小外界環境的干擾,最大程度上消除不可控因素對試驗數據的影響。然而,如圖像粒子測速法等室內試驗方法想要獲得高分辨率的數據往往需要高速攝像機和高功率激光器,這些設備是非常昂貴的[19]。隨著計算流體動力學(computational fluid dynamics,CFD)的發展和計算機計算能力的提升,研究者們的研究從最開始的理論和試驗方法逐漸轉向借助計算機進行數值模擬。然而,對于具有湍流和復雜幾何形狀的流動,基于計算流體動力學的數值模擬方法通常計算繁瑣,特別是針對無人機旋翼這種高速運動問題,網格的生成與重構通常會帶來很大的計算負擔[20]。因此,對植保無人機旋翼下洗流場信息進行快速準確地預測是一項艱巨的挑戰[21]。
深度學習能夠從大數據中自動尋找隱藏特征信息,從而可以預測復雜非線性系統的未來行為[22],為解決下洗流場快速準確地預測這一難題提供了方法。特別是深度神經網絡一旦訓練成功,在應用時僅需要很少的計算時間和計算資源[23]。近些年,越來越多的研究者們開始研究如何利用深度學習技術對流場特征進行探索[24-26]。但這些深度學習的成功主要依賴于大量高分辨率的訓練數據,當數據相對稀缺的時候,純數據驅動的深度學習方法就會遇到困難[27]。針對這個問題,RAISSI等[28]提出了物理信息神經網絡(physics-informed neural networks,PINNs)結構。PINNs既擁有神經網絡的強大能力,又結合了物理學知識使得網絡模型具備可解釋性,能夠在少量訓練數據的情況下,構建出自動滿足物理約束條件的模型。SUN等[29]建立了物理約束的貝葉斯學習框架,基于稀疏且可能存在噪聲的數據重建一個高分辨率的流場,通過數值模擬方法驗證了該模型的可行性,并在血液動力學等問題中得以應用。RAO等[30]提出了一種用于流體力學的PINNs混合變量方案,并將其用于模擬層流狀態下的圓柱繞流,研究表明該方案能夠提高PINNs的可訓練性和求解精度。崔永赫等[31]將-方程轉換成低階導數形式,對變截面管道內的流動情況進行模擬,結果表明該方法能夠準確模擬變截面管道內的流場,并可以通過加速反向傳播過程來加速訓練過程。
為了快速準確地預測單旋翼植保無人機下洗流場的速度信息,本文提出了一種基于PINNs的單旋翼植保無人機旋翼流場預測模型。該模型通過將納維-斯托克斯方程嵌入損失函數中,使得深度學習模型在訓練過程中可以學習無人機旋翼流場的運動規律,得到時空坐標和各物理量之間的映射關系,從而對旋翼下方流場的速度信息進行快速準確預測。
1 模型構建與驗證
1.1 模型構建
單旋翼植保無人機進行噴施作業時,由于旋翼的高速旋轉,形成復雜流場。該研究的目的為在只有低分辨率流場數據的情況下,實現對旋翼下方流場中任意時空位置處的速度信息快速準確地預測。
擬針對深圳高科新農S40型單旋翼植保無人機開展研究,S40型單旋翼植保無人機的主要技術參數如表1所示。
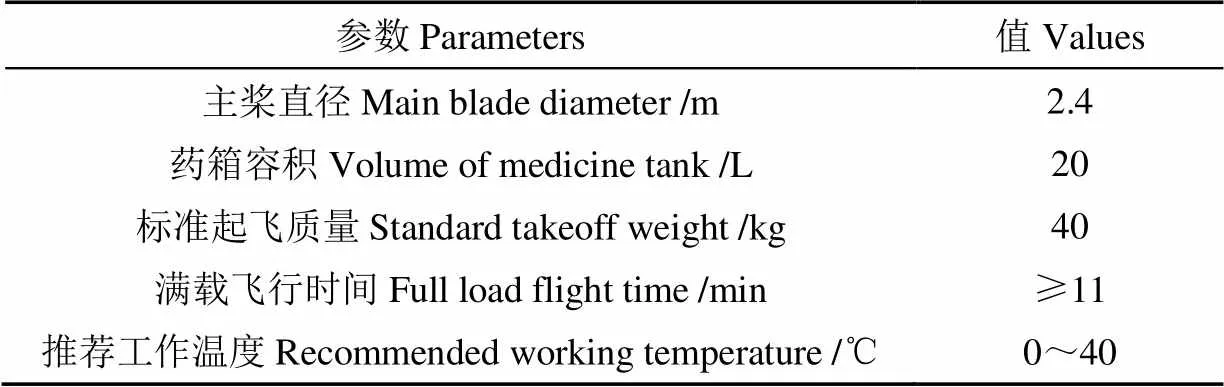
表1 S40型植保無人機的主要技術參數
考慮到在如圖1所示的平面內,旋翼下洗流場大致關于旋轉軸(軸)對稱[19],所以將平面右側框內的區域設置為二維感興趣區域(region of interest, ROI)。ROI的尺寸為3.6 m×2.4 m。預測模型所需的訓練數據集由位于ROI內稀疏時空位置處的流場信息值所組成,這些低分辨率的流場信息數據可以通過試驗方法或者數值模擬方法獲取。
為了實現控制方程的嵌入,構建全連接神經網絡的遞歸形式,如式(1)所示。
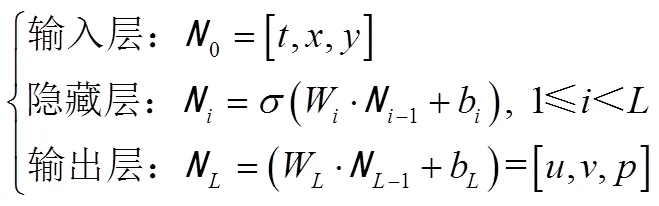

為了減少神經網絡模型對數據的依賴性以及增強模型的可解釋性,該網絡模型在傳統監督學習的基礎上通過嵌入反映流場規律的偏微分方程來加強物理學約束。植保無人機旋翼下方流體遵守質量、能量和動量守恒定律。將旋翼下方流場近似看成是不可壓縮的牛頓流體,得到表達不可壓縮黏性流體流動規律的-方程,無量綱形式的二維-方程為


由式(2)~(4)得到物理學殘差為



全連接神經網絡各層之間均是由算術運算和函數相連接,該模型基于這個特點,利用自動微分技術,通過鏈式規則計算出網絡模型輸出對輸入的偏導數,從而在神經網絡中表示出物理學方程。

基于PINNs的單旋翼植保無人機下洗流場預測模型的構建過程如圖1。

注:t1、t2…tn為訓練數據中的n個連續時刻;為激活函數;I表示不進行任何運算;t、x和y分別為無量綱時間坐標、水平及豎直方向的位置坐標;u、v和p分別為該時空坐標對應的無量綱水平、豎直方向速度以及壓力。
1.2 預測模型的訓練
該研究所使用的訓練數據均來自于作者團隊對S40型單旋翼植保無人機數值模擬的已有結果[15]。以單旋翼植保無人機主槳的旋轉中心為坐標原點,定義豎直向上的方向為軸正方向,無人機機身右側至左側的方向為軸正方向。圖2為采樣點布置示意圖,在旋翼下方的ROI內,設置18×12個訓練采樣點,相鄰采樣點之間間隔0.2 m。

圖2 采樣點布置示意圖
將訓練數據輸入神經網絡模型,整個迭代過程的損失曲線如圖3所示。在前2 000次迭代訓練的過程中,各損失項均振蕩下降;在2 000次到9 000次之間,物理學損失項的損失值多次出現急劇上升現象使得總損失曲線在此過程中存在奇點波動;在最后1 000次迭代過程中,各損失項趨于收斂。訓練完成后,使用預測模型對任意時空位置處的速度信息進行預測僅需約0.05 s,可實現對單旋翼植保無人機下方流場的速度信息進行快速預測。
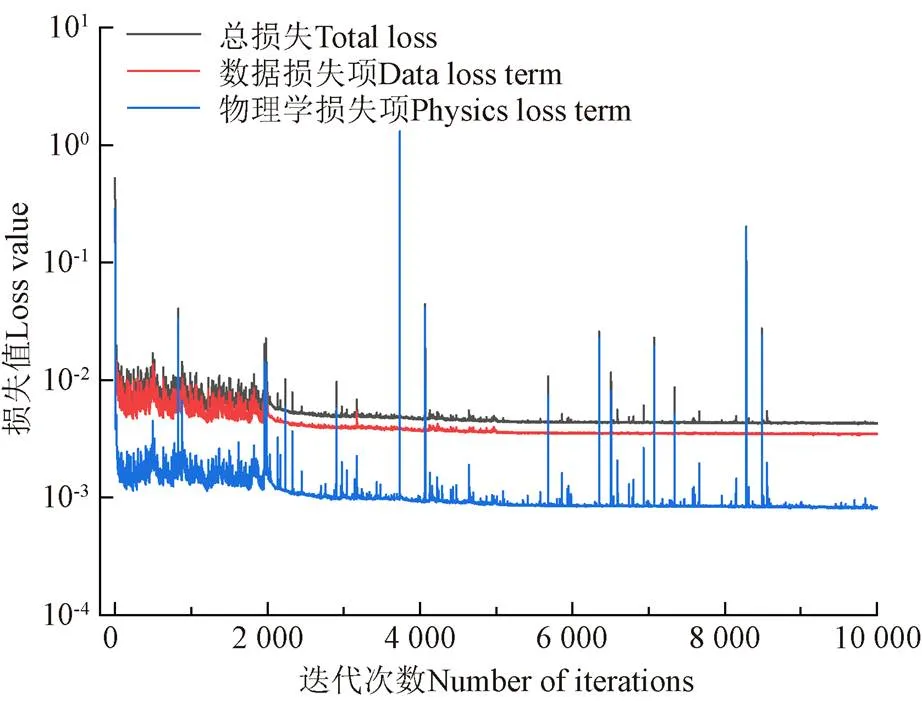
圖3 神經網絡模型的損失曲線
2 結果與分析
2.1 無側風狀態下流場的時空分布特征
將單旋翼植保無人機旋翼開始旋轉的時刻作為初始時刻,旋翼高速轉動使氣流從旋翼上表面流到下表面,并在壓強差的作用下形成下洗氣流。圖4為神經網絡預測模型對1.5、2.0及2.5 s這3個時刻瞬時速度的預測結果。在1.5 s時旋翼下洗流場接觸到了地面,但未沿著地面向外鋪展;在2.0 s時刻,下洗氣流存在沿地面向外擴散的運動趨勢,不過未得到充分的發展,相比2.5 s時刻的橫向鋪展面略小。在整個過程中,由于空氣阻力和地面效應的影響,旋翼下方會出現卷揚氣流,使得附近的霧滴發生卷吸運動,從而在一定程度上增加了霧滴的噴幅。
從=1 s開始,以10 Hz的頻率獲取后續31個時刻的瞬時速度,并對其取平均值,得到的平均速度云圖如圖5所示。

a. t=1.5 sb. t=2.0 sc. t=2.5 s
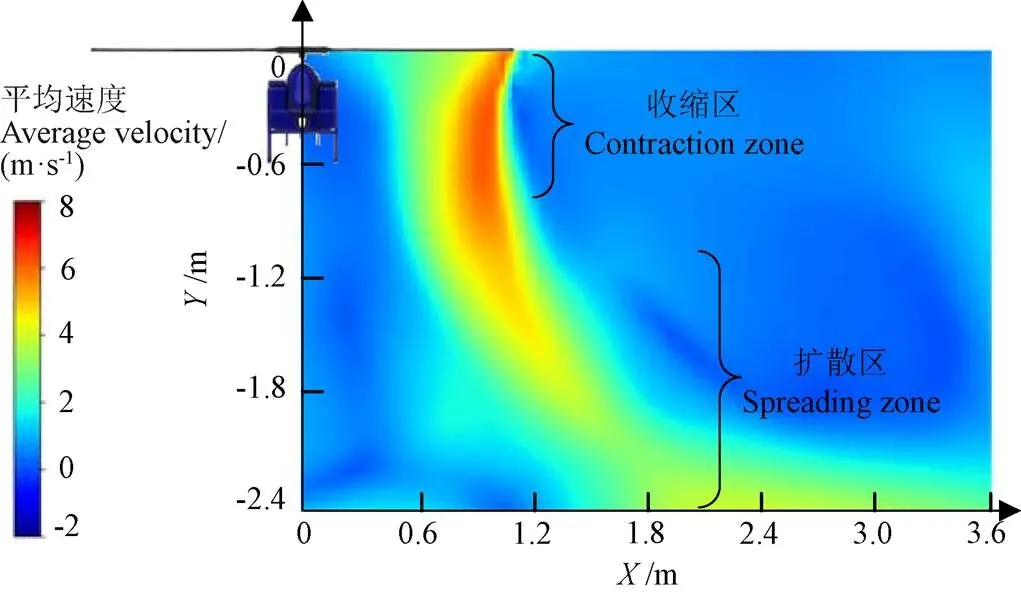
圖5 單旋翼植保無人機下洗流場的平均速度云圖
由圖5可知,旋翼下洗流場整體呈現高速流動和低速流動并存的特征:在機身下方存在一個明顯的低速區,平均速度沿著水平方向呈現先增大后減小的趨勢,最大速度位置位于槳尖下方附近的區域。這是因為槳尖和旋轉中心之間的距離較遠,在高速旋轉時槳尖附近區域的流動速度可達到一個很高的值,而距離旋轉中心較近的槳轂附近的流動卻只能維持在不可壓縮范圍之內。此外,在滑流假設下,當旋翼上方的氣流通過旋翼時會在豎直方向產生一個誘導速度,使得滑流邊界隨著與旋翼平面之間距離的增大而向旋轉軸收縮;同時根據伯努利原理,隨著距旋翼平面的距離增大,靠近旋轉軸的低速區的氣流有向周圍高速區流動的趨勢,使得旋翼下方流場在豎直方向呈現先收縮后擴散的特征。
為了進一步探索旋翼下洗流場在空間域上的變化規律,該研究在平均速度場中從軸開始,沿軸正方向每隔0.1 m做一個標記,并在每個標記位置所處鉛垂線上,距離旋翼0.3、0.7、1.1和1.5 m不同高度處分別設置采樣點,以提取各向速度的預測結果,包括水平方向速度和豎直方向速度。速度檢測位置如圖6所示。
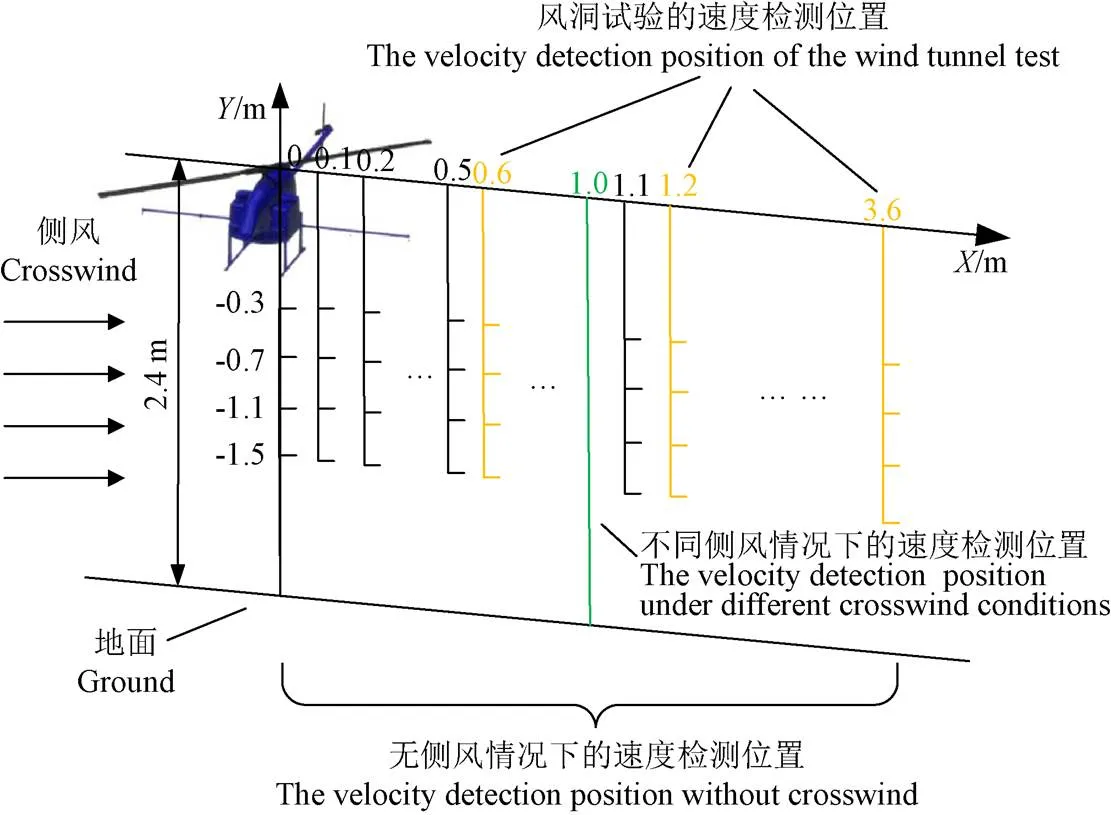
圖6 不同試驗情況下的檢測位置示意圖
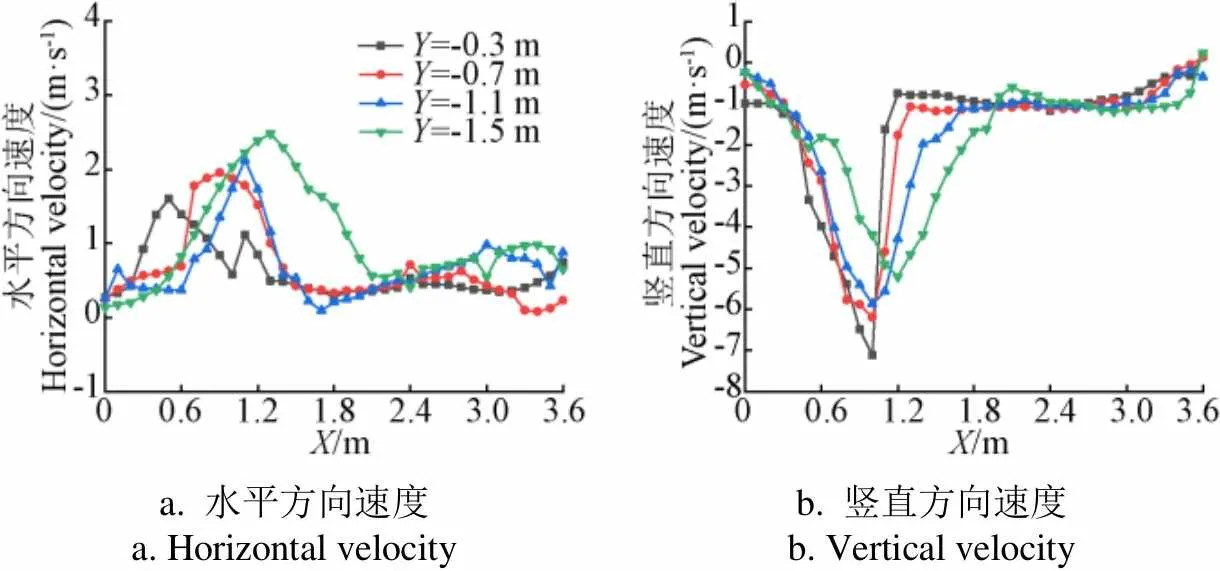
圖7a為水平方向速度在4個不同高度處的分布曲線。從圖中可知,對于每一個高度而言,水平方向速度沿軸正方向均呈現出先增大后減小的趨勢。同時由于旋翼下方的氣流在經過短暫的收縮之后會向四周做鋪展運動,使得隨著高度的下降,流場中的水平方向最大速度逐漸增大,在旋翼下方0.3 m處水平方向最大速度僅有1.60 m/s,而在旋翼下方1.5 m處水平方向最大速度已達到2.48 m/s。由圖 7b可知,由于旋翼高速旋轉將空氣拍向地面,使空氣加速向下運動,從而靠近旋翼的氣流在數值上擁有較大的豎直方向速度。在旋翼下方0.3 m處最大豎直方向速度達7.12 m/s,隨著與旋翼之間距離的增加,旋翼旋轉對流場的加速作用不斷減弱,再加上空氣阻力和地面效應的綜合影響,使得旋翼下方1.5 m處的最大豎直方向速度僅5.21 m/s。
2.2 不同側風風速下的流場特征
在植保無人機進行噴施作業的過程中,環境風是不可避免的。因此,需要就環境風速和旋翼風場對霧滴運動規律的共同作用進行探索。
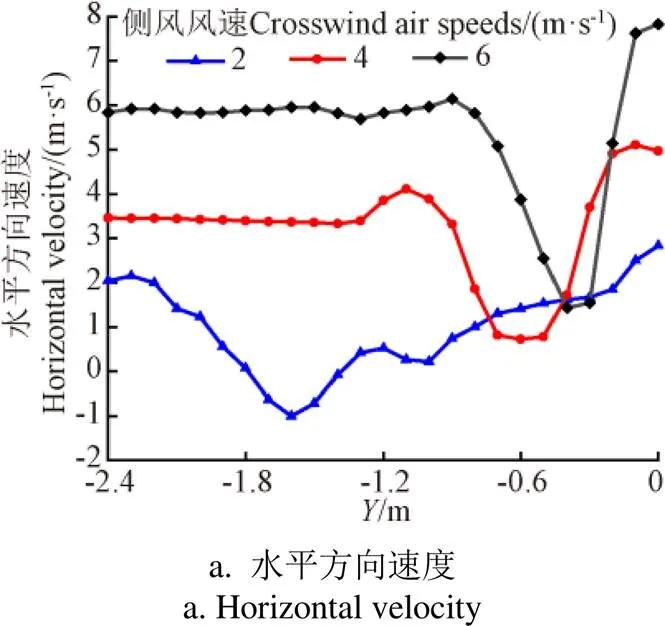
為了研究側風對單旋翼植保無人機下洗流場的影響,利用本文所述方法對2、4、6 m/s側風速度下的流場信息進行預測。從預測結果中提取距離旋翼中心1 m處的各向速度信息(圖6)。
圖8為不同側風速度下各向速度的分布曲線。由圖8a可知:在靠近旋翼的高度處,氣流通過旋翼所產生的誘導速度方向為豎直方向,使得3種側風風速情況對應的水平方向速度主要由側風速度所決定,分別為2.71、4.97以及7.82 m/s;在靠近地面的區域內,由于沒有旋翼流場的影響,檢測位置上獲取到的水平方向速度基本等同于側風風速。從圖8b中可以看出:3種側風風速情況下,在靠近旋翼位置處采集到的豎直方向速度大小基本相同,分別為4.47、4.34以及4.16 m/s;在側風的作用下,加速了流場中流體運動方向從豎直方向向水平方向的轉變,即3種側風風速情況下,豎直方向風速在數值上均迅速降低至接近0。總體上,在側風的作用下,旋翼下洗流場會朝著側風方向發生偏移,偏移角度與側風風速呈正相關。結果表明,由于側風引起的不對稱的下洗流場結構,會影響霧滴的運動軌跡,可能使得霧滴在側風方向產生飄移現象。因此,在實際應用中,可以針對不同的側風速度,合理地改變噴頭方向和噴施起止時間等作業參數,使得霧滴按照預期沉積在靶標區域。
a. 水平方向速度 a. Horizontal velocityb. 豎直方向速度 b. Vertical velocity
3 試驗驗證
采用風洞試驗方法來測量單旋翼植保無人機在不同側風速度情況下旋翼下方流場的速度信息,對比試驗數據和預測數據的吻合度,以驗證本文所述預測模型的準確性和可行性。
3.1 試驗方法
3.1.1 試驗儀器
試驗在華南農業大學國家精準農業航空施藥技術國際聯合中心的風洞實驗室進行(圖9),其風速設計參數范圍為2~52 m/s。S40型單旋翼植保無人機被固定在高度可調節的鋁合金支架上,并將高度設置為與預測模型中相同的2.4 m。然后將單旋翼無人機放置于風洞洞口處,通過改變洞口風速來模擬不同的側風速度。
選用由天諾環能儀器有限公司生產的TNL-CF-3D型三維超聲波風向風速傳感器作為主要的風速測量裝置。對于近旋翼或風速較小的位置,選用速為科技有限公司生產的熱敏式風速儀SW6086進行輔助測量。

1.熱敏式風速儀 2.三維超聲風向風速傳感器 3.S40型單旋翼植保無人機 4.鋁合金支架 5.風洞
3.1.2 采樣點布置
在無人機旋翼下方的ROI內,從軸開始,沿軸正方向每隔0.6 m做一個標記,一直到3.6 m距離處共標記7個位置,并在距離旋翼0.3、0.7、1.1和1.5 m四個不同高度處分別設置采樣點(圖6),以構建驗證數據集。特別注意的是,驗證數據集和訓練數據集所包含的時空位置坐標是完全不同的。
3.2 試驗結果與分析
按照上述測量裝置和試驗方法,分別對S40型單旋翼無人機在0(無側風)、2、4和6 m/s側風風速下的旋翼下洗流場進行測量。待旋翼風場穩定后,以1 Hz的采樣頻率對后續5 s中每個采樣點的各向速度進行測量。為了確保數據的準確性,重復進行3次試驗,將15個試驗結果取平均作為該點的試驗值。
圖10和圖11分別為在無側風時旋翼下方不同高度處水平和豎直方向速度的分布曲線。通過對比預測值和試驗值可以發現,兩者在分布特征和變化趨勢等方面都較為吻合,預測模型在任意位置處的預測誤差均小于0.6 m/s。在旋翼下方0.3、0.7、1.1以及1.5 m處,網絡模型的預測值和試驗值的差異較小,除去易受環境風等外在因素影響的低速區,其余位置處的相對誤差均在15%以內。
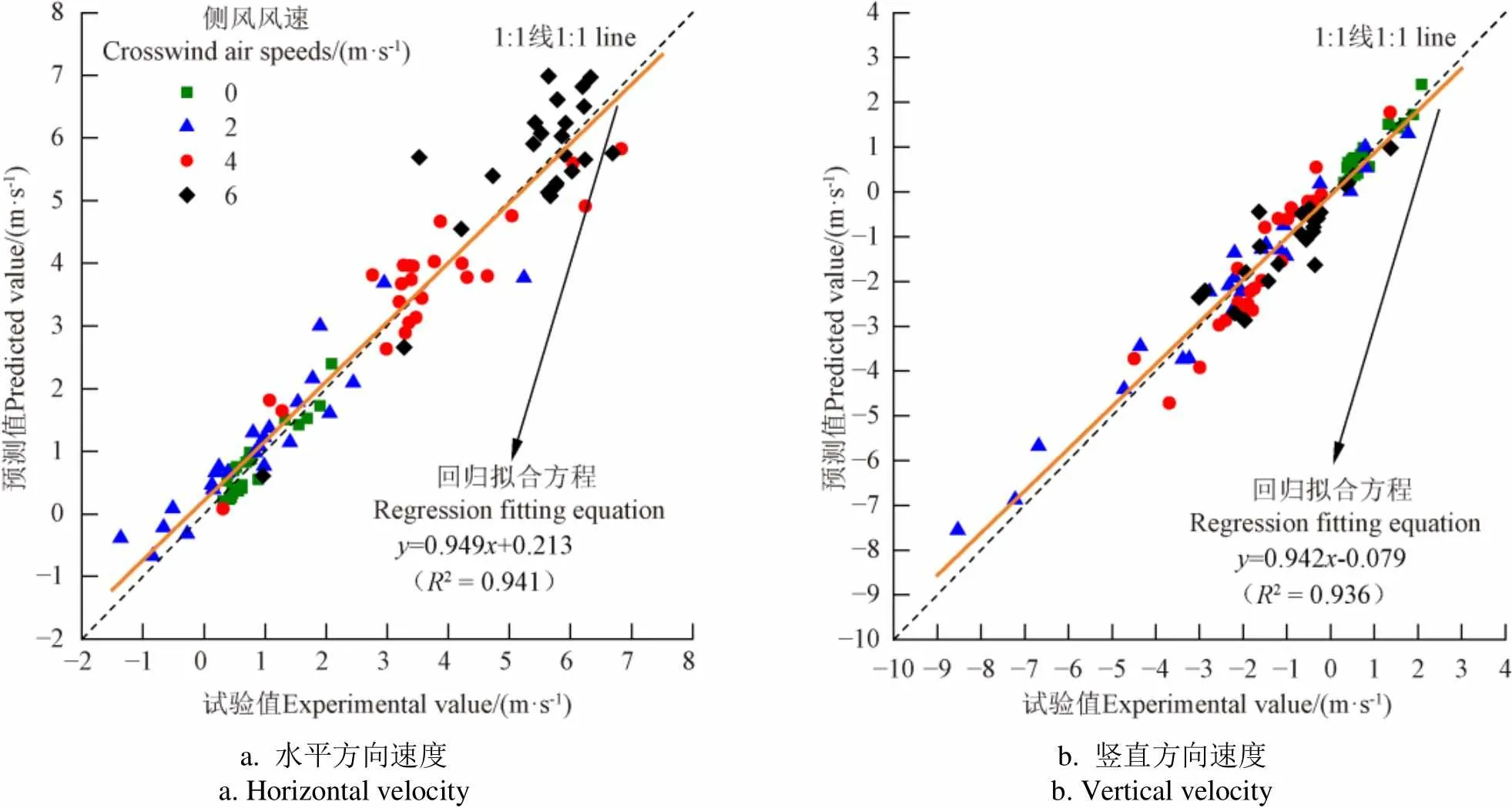
為了進一步分析該方法對不同側風情況下流場各向速度信息的預測能力,對0、2、4以及6 m/s側風風速狀態下的試驗值和預測值進行回歸分析。水平和豎直方向速度的擬合結果分別如圖12所示。其中,水平方向速度的擬合方程為=0.949+0.213,決定系數2=0.941;豎直方向速度的擬合方程為=0.942-0.079,決定系數2=0.936。試驗結果表明,本研究提出的基于物理信息神經網絡的單旋翼植保無人機旋翼下洗流場預測模型可以快速、準確地預測流場信息。

a. Y=-0.3 mb. Y=-0.7 mc. Y=-1.1 md. Y=-1.5 m

a. Y=-0.3 mb. Y=-0.7 mc. Y=-1.1 md. Y=-1.5 m
a. 水平方向速度 a. Horizontal velocityb. 豎直方向速度 b. Vertical velocity
4 結 論
本文以S40型單旋翼植保無人機為研究對象,設計針對單旋翼無人機旋翼下洗流場速度信息的預測模型,并開展風洞試驗對預測結果進行驗證,得出以下結論:
1)通過對模型中的可訓練參數進行迭代更新,能夠得到時空坐標和速度信息等物理量之間的映射關系,僅需約0.05 s就能獲取任意時空位置處的速度信息,實現對流場信息的快速預測。
2)預測結果表明,在沒有側風的情況下,各向速度沿軸方向在數值上均呈現先增大后減小的趨勢,最大速度位置位于槳尖下方附近的區域;在側風的作用下,旋翼下洗流場會朝著側風方向發生偏移,偏移角度與側風風速呈正相關。
3)采用風洞試驗方法測量旋翼下方流場的速度信息,以驗證預測模型的準確性和可行性。對比結果顯示,在沒有側風的情況下,任意位置處的預測值和試驗值間的誤差均小于0.6 m/s;在不同側風風速情況下,對各向速度的預測值和試驗值進行回歸分析的結果表明,預測模型對于單旋翼無人機旋翼下洗流場速度信息有著較為準確的預測能力。
[1] 何勇,杜曉月,鄭力源,等. 無人機飛行高度對植被覆蓋度和植被指數估算結果的影響[J]. 農業工程學報,2022,38(24):63-72. HE Yong, DU Xiaoyue, ZHENG Liyuan, et al. Effects of UAV flight height on estimated fractional vegetation cover and vegetation index[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(24): 63-72. (in Chinese with English abstract)
[2] KIM J, KIM S, JU C, et al. Unmanned aerial vehicles in agriculture: A review of perspective of platform, control, and applications[J]. IEEE Access, 2019, 7: 105100-105115.
[3] 康峰,吳瀟逸,王亞雄,等. 農藥霧滴沉積特性研究進展與展望[J]. 農業工程學報,2021,37(20):1-14. KANG Feng, WU Xiaoyi, WANG Yaxiong, et al. Research progress and prospect of pesticide droplet deposition characteristics[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(20): 1-14. (in Chinese with English abstract)
[4] 蘭玉彬,單常峰,王慶雨,等. 不同噴霧助劑在植保無人機噴施作業中對霧滴沉積特性的影響[J]. 農業工程學報,2021,37(16):31-38. LAN Yubin, SHAN Changfeng, WANG Qingyu, et al. Effects of different spray additives on droplet deposition characteristics during plant protection UAV spraying operations[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(16): 31-38. (in Chinese with English abstract)
[5] XUE X Y, TU K, QIN W C, et al. Drift and deposition of ultra-low altitude and low volume application in paddy field[J]. International Journal of Agricultural and Biological Engineering, 2014, 7(4): 23-28.
[6] 王國賓,李烜,JOHN A,等. 田間農藥霧滴精準采樣技術與發展趨勢[J]. 農業工程學報,2021,37(11):1-12. WANG Guobin, LI Xuan, JOHN A, et al. Current status and prospects of precise sampling of pesticide droplets[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(11): 1-12. (in Chinese with English abstract)
[7] 龔艷,張曉,王果,等. 基于農田環境因子模擬農藥霧滴飄移特性[J]. 江蘇農業科學,2018,46(11):205-208.
[8] 李繼宇,周志艷,蘭玉彬,等. 旋翼式無人機授粉作業冠層風場分布規律[J]. 農業工程學報,2015,31(3):77-86. LI Jiyu, ZHOU Zhiyan, LAN Yubin, et al. Distribution of canopy wind field produced by rotor unmanned aerial vehicle pollination operation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 77-86. (in Chinese with English abstract)
[9] 陳盛德,蘭玉彬,BRADLEY K F,等. 多旋翼無人機旋翼下方風場對航空噴施霧滴沉積的影響[J]. 農業機械學報,2017,48(8):105-113. CHEN Shengde, LAN Yubin, BRADLEY K F, et al. Effect of wind field below rotor on distribution of aerial spraying droplet deposition by using multi-rotor UAV[J]. Transactions of the Chinese Society for Agricultural Machinery (Transactions of the CSAM), 2017, 48(8): 105-113. (in Chinese with English abstract)
[10] 姚偉祥,蘭玉彬,王娟,等. AS350B3e直升機航空噴施霧滴飄移分布特性[J]. 農業工程學報,2017,33(22):75-83. YAO Weixiang, LAN Yubin, WANG Juan, et al. Droplet drift characteristics of aerial spraying of AS350B3e helicopter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(22): 75-83. (in Chinese with English abstract)
[11] 王昌陵,何雄奎,BONDS J,等. 不同飛行參數下八旋翼植保無人機下洗氣流場對霧滴沉積分布特性的影響[J]. 智慧農業(中英文),2020,2 (4):124-136. WANG Changling, HE Xiongkui, BONDS J, et al. Effect of downwash airflow field of 8-rotor unmanned aerial vehicle on spray deposition distribution characteristics under different flight parameters[J]. Smart Agriculture, 2020, 2(4): 124-136. (in Chinese with English abstract)
[12] GREEN R B, GILLIES E A, BROWN R E, et al. The flow field around a rotor in axial descent[J]. Journal of Fluid Mechanics, 2005, 534: 237-261.
[13] TANG Q, ZHANG R, CHEN L, et al. High-accuracy, high-resolution downwash flow field measurements of an unmanned helicopter for precision agriculture[J]. Computers and Electronics in Agriculture, 2020, 173: 105390.
[14] 張海艷,蘭玉彬,文晟,等. 無人機旋翼風場作用下霧滴在水稻植株上的黏附量預測模型[J]. 農業工程學報,2022,38(18):40-50. ZHANG Haiyan, LAN Yubin, WEN Sheng, et al. Modelling approach of spray retention on rice in plant protection using unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(18): 40-50. (in Chinese with English abstract)
[15] 文晟,韓杰,蘭玉彬,等. 單旋翼植保無人機翼尖渦流對霧滴飄移的影響[J]. 農業機械學報,2018,49(8):127-137, 160. WEN Sheng, HAN Jie, LAN Yubin, et al. Influence of wing tip vortex on drift of single rotor plant protection unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Machinery (Transactions of the CSAM), 2018, 49(8): 127-137, 160. (in Chinese with English abstract)
[16] LIU X, ZHANG W, FU H, et al. Distribution regularity of downwash airflow under rotors of agricultural UAV for plant protection[J]. International Journal of Agricultural and Biological Engineering, 2021, 14(3): 46-57.
[17] 王玲,張旗,侯啟航,等. 六旋翼植保無人機風場豎直分布特性數值模擬與驗證[J]. 農業機械學報,2022,53(S2):75-83. WANG Ling, ZHANG Qi, HOU Qihang, et al. Vertical distribution law of six-rotor plant protection UAV based on multi-feature parameters[J]. Transactions of the Chinese Society for Agricultural Machinery (Transactions of the CSAM), 2022, 53(S2): 75-83. (in Chinese with English abstract)
[18] 張海艷,蘭玉彬,文晟,等. 植保無人機旋翼風場模型與霧滴運動機理研究進展[J]. 農業工程學報,2020,36(22):1-12. ZHANG Haiyan, LAN Yubin, WEN Sheng, et al. Research progress in rotor airflow model of plant protection UAV and droplet motion mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(22): 1-12. (in Chinese with English abstract)
[19] DENG Z, CHEN Y, LIU Y, et al. Time-resolved turbulent velocity field reconstruction using a long short-term memory (LSTM)-based artificial intelligence framework[J]. Physics of Fluids, 2019, 31(7): 075108
[20] HUANG J, LIU H, CAI W. Online in situ prediction of 3-D flame evolution from its history 2-D projections via deep learning[J]. Journal of Fluid Mechanics, 2019, 875: R2.
[21] HAN R, WANG Y, ZHANG Y, et al. A novel spatial-temporal prediction method for unsteady wake flows based on hybrid deep neural network[J]. Physics of Fluids, 2019, 31(12): 127101.
[22] LECUN Y, BENGIO Y, HINTON G. Deep learning[J]. Nature, 2015, 521(7553): 436-444.
[23] 王怡星,韓仁坤,劉子揚,等. 流體力學深度學習建模技術研究進展[J]. 航空學報,2021,42(4):231-250. WANG Yixing, HAN Renkun, LIU Ziyang, et al. Progress of deep learning modeling technology for fluid mechanics[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(4): 231-250. (in Chinese with English abstract)
[24] HU C, WU Q, LI H, et al. Deep learning with a long short-term memory networks approach for rainfall-runoff simulation[J]. Water, 2018, 10(11): 1543.
[25] WEN S, SHEN N, ZHANG J, et al. Single-rotor UAV flow field simulation using generative adversarial networks[J]. Computers and electronics in agriculture, 2019, 167: 105004.
[26] PANT P, DOSHI R, BANL P, et al. Deep learning for reduced order modelling and efficient temporal evolution of fluid simulations[J]. Physics of Fluids, 2021, 33(10): 107101.
[27] YANG Y, PERDIKARIS P. Adversarial uncertainty quantification in physics-informed neural networks[J]. Journal of Computational Physics, 2019, 394: 136-152.
[28] RAISSI M, Perdikaris P, Karniadakis G E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations[J]. Journal of Computational physics, 2019, 378: 686-707.
[29] SUN L, WANG J X. Physics-constrained bayesian neural network for fluid flow reconstruction with sparse and noisy data[J]. Theoretical and Applied Mechanics Letters, 2020, 10(3): 161-169.
[30] RAO C, SUN H, LIU Y. Physics-informed deep learning for incompressible laminar flows[J]. Theoretical and Applied Mechanics Letters, 2020, 10(3): 207-212.
[31] 崔永赫,張文耀,閆慧龍,等. “硬”邊界低階導數型物理信息神經網絡:一種流動求解器[J]. 西安交通大學學報,2022,56(9):123-133. CUI Yonghe, ZHANG Wenyao, YAN Huilong, et al. “Hard” boundary low-order derivative physics informed neural network: A fluid flow solver[J]. Journal of Xi’an Jiaotong University, 2022, 56(9): 123-133.
Prediction model for the downwash flow field of single-rotor plant protection UAV using PINNs
WANG Tao1, WEN Sheng1,3※, LAN Yubin2,3, ZHANG Haiyan4, YIN Xuanchun1,3, ZHANG Jiantao3,5
(1.,,510642,; 2.,,510642,; 3.,510642,; 4.,,110161,; 5.,,510642,)
Plant protection drones can rotate at high speed in the process of droplet spraying. The downwash flow field can be generated by the rotors, leading to droplet drift. A rapid and accurate prediction of the velocity in the downwash flow field under the rotor can greatly contribute to improving the effectiveness of the UAV’s precision application. In this study, a prediction model was constructed in the downwash flow field of the single-rotor plant protection UAV using a physics-informed neural network. The prediction model effectively combined fluid dynamics and artificial intelligence (AI). A neural network model also incorporated into the physical equations. The powerful capabilities of the neural network were combined with the disciplinary context. Firstly, a physical model was used with the Lattice-Boltzmann to numerically simulate the flow field of the single-rotor plant protection UAV. The low-resolution flow field was then used to train the prediction model after numerical simulation. Secondly, the Navier-Stokes equations were embedded as the physics loss term in the prediction model, according to the fully connected neural network structure. The physics equations were utilized in the prediction model to learn the fluid flow patterns in the flow field. The interpretability of the model was enhanced to reduce the data dependence of the network model. Thirdly, the trainable parameters were updated iteratively to minimize the loss function during the training. The loss function was composed of both the physics and data loss terms. The training process was then realized to obtain the mapping relationship between physical quantities (such as velocity information) and space-time coordinates. As such, the mapping relationship was used to realize the fast prediction of the downwash flow field in the single-rotor plant protection UAV. Finally, the wind tunnel experiment was carried out to measure the velocity information of the flow field of the single-rotor plant protection drone under different side wind speed conditions. The accuracy and feasibility of the prediction model were verified to compare the differences between the experimental and predicted data. There was a small difference between the predicted and experimental values without the side wind. The errors between the predicted and experimental values were less than 0.6 m/s at four distances (including 0.3, 0.7, 1.1, and 1.5 m) below the rotor. The relative errors were within 15% at the rest of the locations, except that the low-velocity area was susceptible to external factors (such as ambient wind). The linear regression was performed on the predicted and experimental values in each directional velocity under the different conditions of side wind speed (including 0, 2, 4, and 6 m/s). The expressions of the fitted curves were=0.949+0.213 and=0.942-0.079, respectively. In conclusion, the prediction model can greatly contribute to determining the downwash flow field in the single-rotor plant protection drone. An effective technical reference can be offered to rapidly and accurately predict the flow of field information. The finding can also provide data support to the influencing mechanism of wind field on the droplet deposition distribution.
UAV; model; neural network; downwash flow field; single-rotor
10.11975/j.issn.1002-6819.202209259
S252
A
1002-6819(2023)-06-0083-09
王濤,文晟,蘭玉彬,等. 基于PINNs的單旋翼植保無人機下洗流場預測模型[J]. 農業工程學報,2023,39(6):83-91.doi:10.11975/j.issn.1002-6819.202209259 http://www.tcsae.org
WANG Tao, WEN Sheng, LAN Yubin, et al. Prediction model for the downwash flow field of single-rotor plant protection UAV using PINNs[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(6): 83-91. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.202209259 http://www.tcsae.org
2022-09-29
2023-02-27
國家自然科學基金項目(32271985);廣東省自然科學基金項目(2022A1515011008);廣東省普通高校特色創新類項目(2019KTSCX016)
王濤,研究方向為CFD和深度學習融合的無人機流場。Email:1753018668@qq.com
文晟,博士,副教授。研究方向為植保機械和精準噴霧技術。Email:vincen@scau.edu.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
電機與控制應用(2021年12期)2021-02-28 07:55:52
計算機應用(2021年1期)2021-01-21 03:22:38
海洋通報(2020年5期)2021-01-14 09:26:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
西南交通大學學報(2016年4期)2016-06-15 20:29:37
