基于參數(shù)辨識(shí)的推進(jìn)電機(jī)模型參考自適應(yīng)控制
2023-04-27 13:05:06呂長(zhǎng)龍周毅李萌蒙學(xué)昊羅文忠
船海工程 2023年2期
關(guān)鍵詞:模型
呂長(zhǎng)龍,周毅,李萌,蒙學(xué)昊,羅文忠
(中海油能源發(fā)展股份有限公司采油服務(wù)分公司,天津 300452)
對(duì)于永磁同步電機(jī)(PMSM)無(wú)傳感器控制系統(tǒng),準(zhǔn)確估計(jì)電機(jī)轉(zhuǎn)速和轉(zhuǎn)子位置是控制系統(tǒng)實(shí)施的主要任務(wù)。目前研究和應(yīng)用最廣泛的方法主要有開(kāi)環(huán)磁鏈法、觀測(cè)器法、模型參考自適應(yīng)系統(tǒng)(MRAS)、旋轉(zhuǎn)/脈沖高頻注入法、神經(jīng)網(wǎng)絡(luò)等[1-2]。MRAS在PMSM無(wú)傳感器控制系統(tǒng)中的應(yīng)用是通過(guò)電流傳感器測(cè)量電機(jī)定子電流實(shí)際值與數(shù)學(xué)模型計(jì)算出的估計(jì)值之間的誤差,設(shè)計(jì)自適應(yīng)率,進(jìn)而估計(jì)出電機(jī)的轉(zhuǎn)子位置信息。這種方法由于物理意義明確、設(shè)計(jì)相對(duì)簡(jiǎn)單、識(shí)別準(zhǔn)確率高而被廣泛使用[3]。
為保證PMSM無(wú)傳感器控制系統(tǒng)對(duì)電機(jī)轉(zhuǎn)速具有較高的估測(cè)精度,控制系統(tǒng)中的電機(jī)參數(shù)必須足夠精確。在實(shí)際應(yīng)用中,電機(jī)參數(shù)會(huì)隨電機(jī)運(yùn)行狀態(tài),環(huán)境溫度等發(fā)生改變。因此控制系統(tǒng)必須具有電機(jī)參數(shù)實(shí)時(shí)在線修正的能力。在基于MRAS的PMSM無(wú)傳感器控制系統(tǒng)中,MRAS的實(shí)現(xiàn)離不開(kāi)電機(jī)模型中準(zhǔn)確的電機(jī)參數(shù)。電機(jī)定子電阻和電感隨溫度而變化,從而降低了估計(jì)轉(zhuǎn)子位置信息方法的準(zhǔn)確性。針對(duì)這一問(wèn)題,提出使用參數(shù)辨識(shí)實(shí)時(shí)修正控制系統(tǒng)中模型參數(shù)的設(shè)計(jì)方案。利用計(jì)算速度快,結(jié)構(gòu)簡(jiǎn)單的Adaline神經(jīng)網(wǎng)絡(luò)對(duì)電機(jī)參數(shù)進(jìn)行參數(shù)辨識(shí),將辨識(shí)值反饋至MRAS中,實(shí)時(shí)修正MRAS中的模型參數(shù),提高M(jìn)RAS對(duì)電機(jī)轉(zhuǎn)速和轉(zhuǎn)子位置角的估測(cè)精度,提升推進(jìn)電機(jī)的控制性能。
1 PMSM矢量控制
1.1 PMSM數(shù)學(xué)模型
PMSM在dq坐標(biāo)系下的等效電路見(jiàn)圖1[4]。

圖1 PMSM在dq坐標(biāo)系下的等效電路
則PMSM在dq軸的等效電路電壓方程為
(1)
式中:Id、Iq是dq坐標(biāo)系下的定子電流;Ud、Uq是dq坐標(biāo)系下的定子電壓;R是定子電感;Ld、Lq是dq軸的電感;ωe為轉(zhuǎn)子電氣角速度;φf(shuō)為轉(zhuǎn)子磁鏈。
電機(jī)的電磁轉(zhuǎn)矩方程為
(2)
式中:pn為電機(jī)磁極對(duì)數(shù)。
此時(shí),電機(jī)的運(yùn)動(dòng)方程為
(3)
式中:TL為電機(jī)負(fù)載轉(zhuǎn)矩。
根據(jù)公式(2)和(3)可知,在dq坐標(biāo)系中,電磁轉(zhuǎn)矩與機(jī)械角速度成正比,而在(3)中,電磁轉(zhuǎn)矩又與q軸電流成正比。因此在PMSM的控制系統(tǒng)中,可以通過(guò)對(duì)q軸電流的控制,實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速的控制,因此選擇id=0的矢量控制。
1.2 基于id=0矢量PMSM矢量控制系統(tǒng)的實(shí)現(xiàn)
PMSM矢量控制系統(tǒng)組成見(jiàn)圖2[5]。
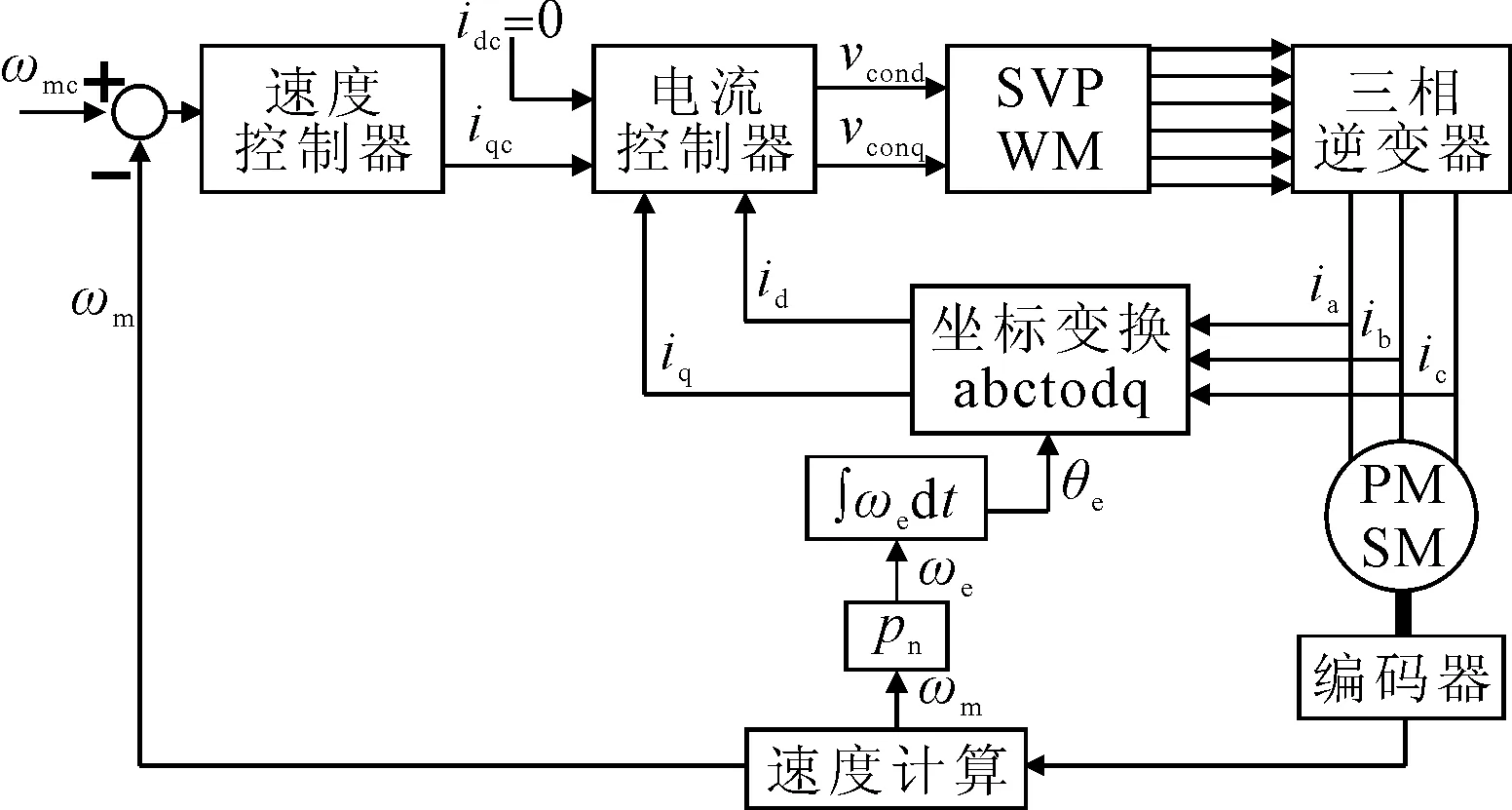
圖2 PMSM矢量控制系統(tǒng)組成
圖中,ia、ib、ic是三相定子電流;id、iq是dq坐標(biāo)系下的定子電流;θe是電氣角度;ωe是電機(jī)實(shí)際電氣角速度。PMSM矢量控制是一個(gè)由電流控制環(huán)和速度控制環(huán)組成的雙閉環(huán)控制系統(tǒng)。速度控制環(huán)的輸入由電機(jī)轉(zhuǎn)子給定機(jī)械角速度ωmc和電機(jī)轉(zhuǎn)子實(shí)際機(jī)械角速度ωm構(gòu)成,兩者做差后經(jīng)速度控制器,輸出為電流控制環(huán)q軸電流的輸入量iqc。電流控制環(huán)的輸入由給定的d軸電流idc=0和q軸電流iqc構(gòu)成,將給定的d軸電流與反饋得到的d軸電流id做差,經(jīng)d軸電流控制器輸出d軸控制電壓Vcond;將q軸電流iqc與反饋得到的q軸電流iq做差,經(jīng)q軸電流控制器輸出q軸控制電壓Vconq。之后兩相控制電壓經(jīng)電壓空間矢量脈寬調(diào)制(SVPWM)生成功率開(kāi)關(guān)管的控制信號(hào),從而實(shí)現(xiàn)PMSM的速度控制。
2 無(wú)傳感器控制系統(tǒng)的設(shè)計(jì)
2.1 模型參考自適應(yīng)系統(tǒng)
MRAS的結(jié)構(gòu)圖見(jiàn)圖3,其基本思路是以參數(shù)未知的數(shù)學(xué)表達(dá)式為參考模型,參數(shù)未知的表達(dá)式為可調(diào)模型。兩種模型的輸出物理意義相同。通過(guò)使用兩個(gè)模型的輸出值之間的誤差來(lái)估計(jì)轉(zhuǎn)子速度和轉(zhuǎn)子位置來(lái)設(shè)計(jì)參數(shù)適應(yīng)率[6]。
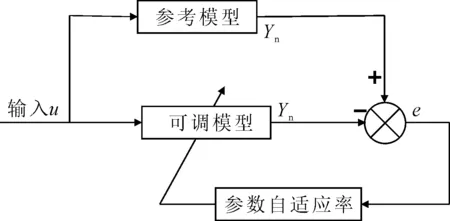
圖3 MRAS系統(tǒng)結(jié)構(gòu)
在圖3中,u是系統(tǒng)的輸入,Ym和Yn是期望模型和可調(diào)模型輸出的狀態(tài)量,e是Ym和Yn之間的誤差。
根據(jù)PMSM在dq軸上的電壓方程得到電流方程為
(4)
為了獲得PMSM的可調(diào)模型,將公式(4)重寫(xiě)為
(5)
式中:
(6)
將公式(5)改寫(xiě)為:
(7)
將輸出誤差定義為e=I-I′,則誤差方程為
(8)
其中:
為保證控制系統(tǒng)穩(wěn)定,根據(jù)Popov超穩(wěn)定性判據(jù),須滿足以下條件。
1)傳遞函數(shù)H(s)=(sI-Ae)-1為嚴(yán)格正定矩陣。

根據(jù)Popov積分不等式可得電角速度的自適應(yīng)律為
(9)
將式(6)代入式(9),可得
(10)
則估測(cè)得到的轉(zhuǎn)子位置角為
(11)
2.2 Adaline神經(jīng)網(wǎng)絡(luò)在線參數(shù)辨識(shí)
Adaline神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)見(jiàn)圖4,圖中X1、X2、…、Xn為網(wǎng)絡(luò)輸入,W1、W2、…、Wn為網(wǎng)絡(luò)各輸入量對(duì)應(yīng)的權(quán)值,O(k)為神經(jīng)網(wǎng)絡(luò)的實(shí)際輸出,d(k)為目標(biāo)輸出,k代表第k次采樣[7]。

圖4 Adaline神經(jīng)網(wǎng)絡(luò)系統(tǒng)框圖
此時(shí)網(wǎng)絡(luò)輸入矢量為
X=[X1,X2,…,Xn]T
(12)
權(quán)重矢量為
W=[W1,W2,…,Wn]T
(13)
X和W之間的函數(shù)關(guān)系可以表示為
(14)
式中i=1,2,3,…,n。
根據(jù)最小均方誤差法調(diào)整網(wǎng)絡(luò)權(quán)重,通過(guò)最速下降法可以得到
ΔW=2η·[d(k)-O(k)]·X(k)
(15)
η是一個(gè)大于0的有界正數(shù)。通過(guò)使網(wǎng)絡(luò)權(quán)重適應(yīng)最小均方誤差法,可以得到
(16)
式中:X(k)、O(k)、W(k)和d(k)分別為Adaline神經(jīng)網(wǎng)絡(luò)在第k次采樣時(shí)的輸入、輸出、權(quán)重和目標(biāo)輸出;ε(k)是O(k)和d(k)之間的誤差信號(hào);λ是權(quán)重計(jì)算的步長(zhǎng)。
在使用Adaline神經(jīng)網(wǎng)絡(luò)對(duì)PMSM進(jìn)行在線參數(shù)識(shí)別時(shí),λ需要滿足下式,以保證Adaline神經(jīng)網(wǎng)絡(luò)的收斂性。
0<2λ|X(k)|2<1
(17)
根據(jù)id=0矢量控制策略,PMSM的參數(shù)辨識(shí)模型為
(18)
由于(18)中電壓方程的秩為2,Ls,R和φf(shuō)不能同時(shí)識(shí)別。故采用注入d軸電流法來(lái)解決這一問(wèn)題[8]。此時(shí),Ls,R和φf(shuō)的全秩辨識(shí)模型為
(19)

那么,PMSM的參數(shù)自適應(yīng)率為
(20)
(21)
(22)
式中:XL(k)、XR(k)、Xφf(shuō)(k)為各參數(shù)辨識(shí)模型的輸入;OL(k)、OR(k)、Oφf(shuō)(k)為各參數(shù)辨識(shí)模型的輸出;dL(k)、dR(k)、dφf(shuō)(k)為各參數(shù)辨識(shí)模型的目標(biāo)輸出。根據(jù)公式(20)、(21)、(22)即可對(duì)PMSM的Ls、R和φf(shuō)進(jìn)行參數(shù)辨識(shí)。
3 控制系統(tǒng)仿真
3.1 基于SVPWM的PMSM矢量控制
根據(jù)圖1搭建基于id=0的PMSM矢量控制仿真模型。仿真模型選用某船用PMSM的主要參數(shù)見(jiàn)表1。
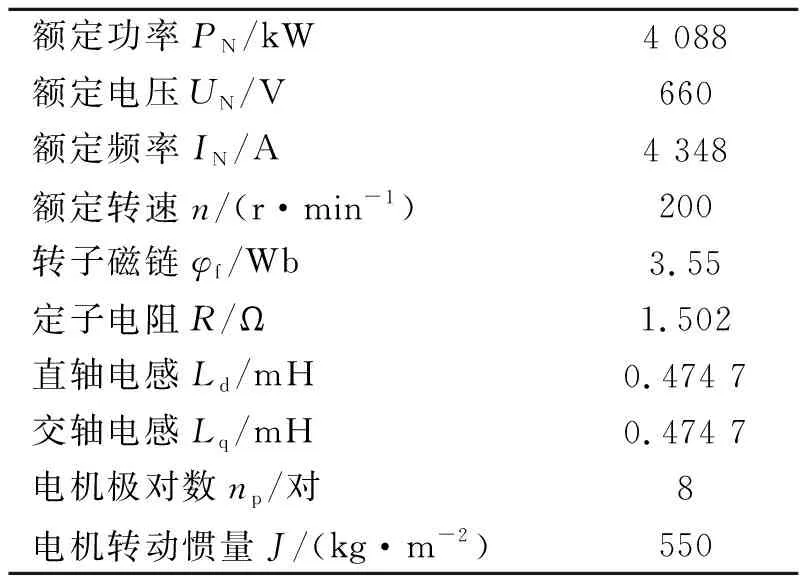
表1 PMSM主要參數(shù)
仿真過(guò)程中,設(shè)定電機(jī)起動(dòng)時(shí)負(fù)載轉(zhuǎn)矩為100 000 N·m,給定轉(zhuǎn)速為150 r/min,0.5 s時(shí)轉(zhuǎn)速突變?yōu)?00 r/min,仿真時(shí)間為1 s。仿真得到的電機(jī)轉(zhuǎn)速、轉(zhuǎn)子位置和三相定子電流見(jiàn)圖5。
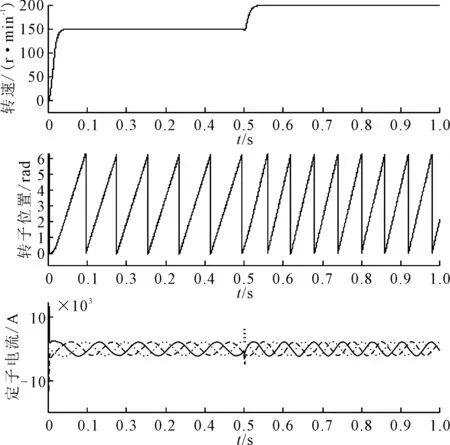
圖5 基于SVPWM的PMSM矢量控制仿真結(jié)果
分析轉(zhuǎn)速波形圖可知,轉(zhuǎn)速變化過(guò)程中無(wú)超調(diào)量,轉(zhuǎn)速變化速度快且平滑。在電機(jī)運(yùn)行過(guò)程中,定子電流隨轉(zhuǎn)速的變化而發(fā)生響應(yīng)變化。從仿真結(jié)果可知,該控制系統(tǒng)在轉(zhuǎn)速發(fā)生變化時(shí),響應(yīng)速度快,曲線平滑,證明該系統(tǒng)具有很好的動(dòng)、靜態(tài)性能。
3.2 基于MRAS的PMSM無(wú)傳感器控制
根據(jù)圖6搭建基于MRAS的PMSM無(wú)傳感器控制仿真模型。
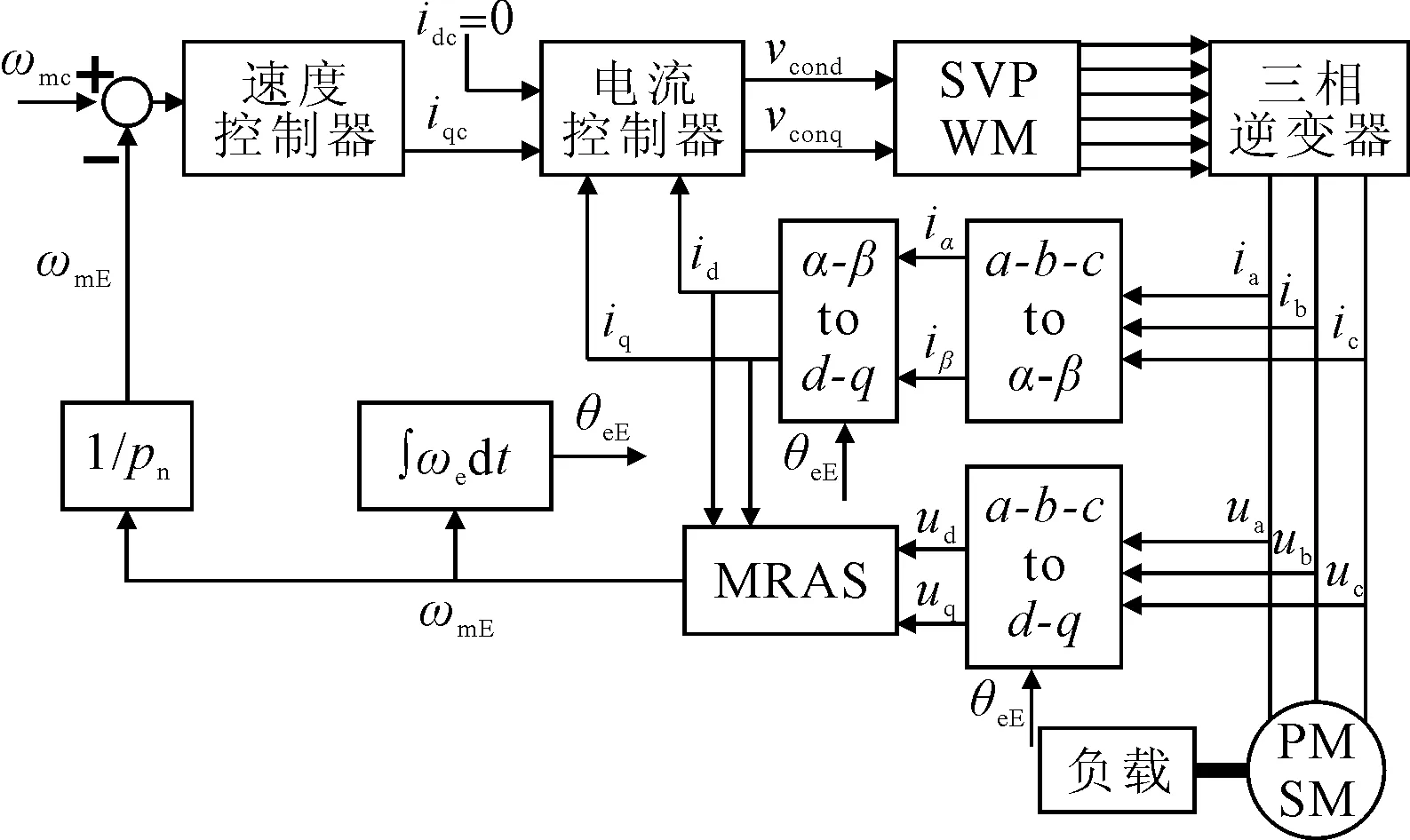
圖6 基于MRAS的PMSM無(wú)傳感器控制系統(tǒng)圖
仿真過(guò)程中,按照上節(jié)仿真過(guò)程進(jìn)行仿真實(shí)驗(yàn)。電機(jī)轉(zhuǎn)速、轉(zhuǎn)速估測(cè)誤差和轉(zhuǎn)子位置角估測(cè)誤差的仿真結(jié)果見(jiàn)圖7。
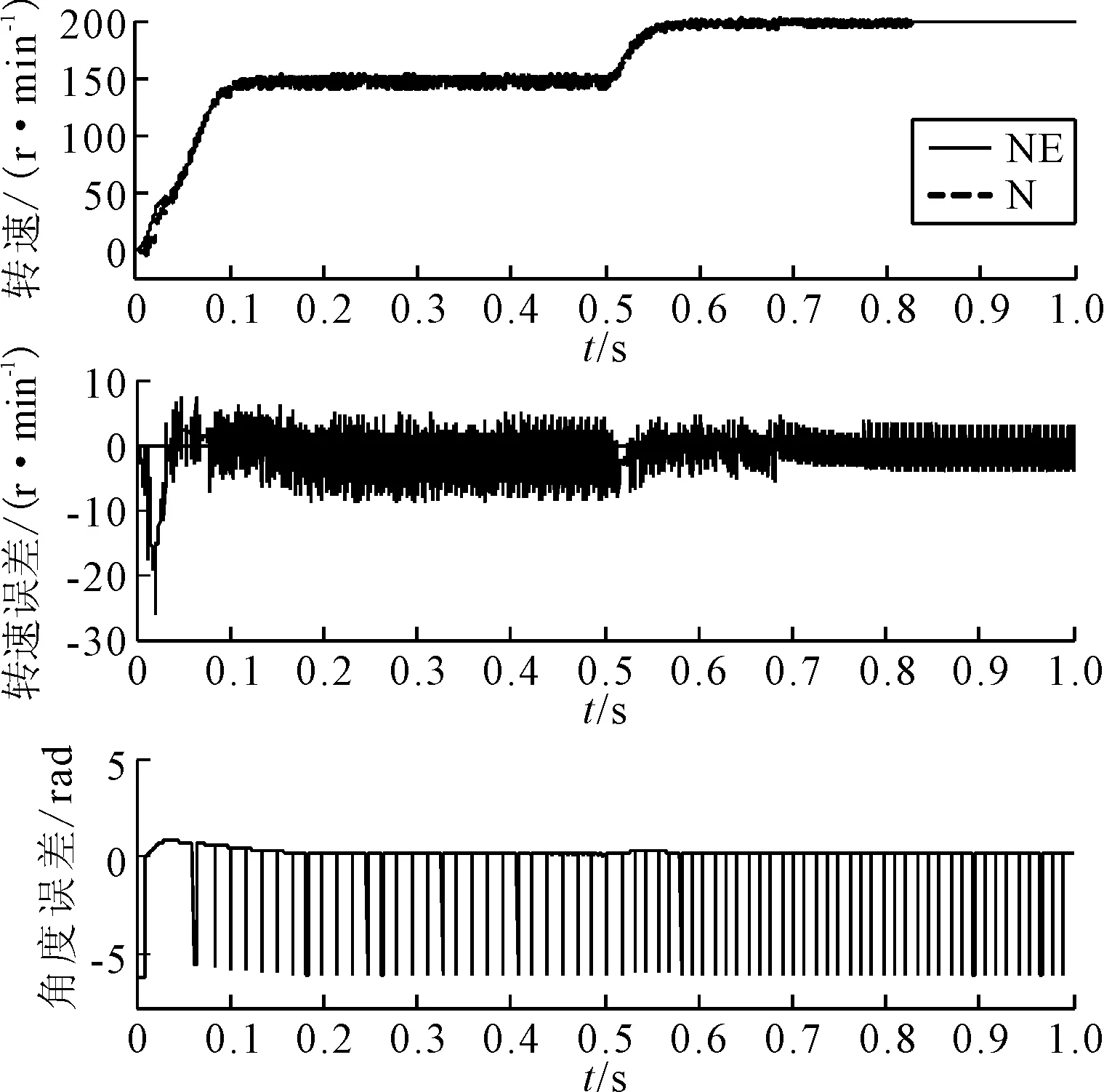
圖7 基于MRAS的PMSM無(wú)傳感器控制仿真結(jié)果
由圖7可知,使用MRAS估測(cè)電機(jī)轉(zhuǎn)速和轉(zhuǎn)子位置時(shí),在電機(jī)穩(wěn)定運(yùn)行時(shí)對(duì)轉(zhuǎn)子轉(zhuǎn)速的估測(cè)誤差約為9 r/min,轉(zhuǎn)子位置角的估測(cè)誤差約為0.12 rad。在轉(zhuǎn)速突變時(shí),MRAS對(duì)轉(zhuǎn)速的估測(cè)誤差增大。總體分析可知,基于MRAS的PMSM無(wú)傳感器控制仿真模型對(duì)轉(zhuǎn)子轉(zhuǎn)速和轉(zhuǎn)子位置具有較好的估測(cè)性能,但對(duì)電機(jī)轉(zhuǎn)速的估測(cè)精度需進(jìn)一步提高。
3.3 基于參數(shù)辨識(shí)的PMSM模型參考自適應(yīng)控制
根據(jù)圖8在Simulink中搭建基于參數(shù)辨識(shí)的PMSM模型參考自適應(yīng)控制系統(tǒng)仿真模型。控制系統(tǒng)包含SVPWM控制模塊,MRAS模塊和Adaline神經(jīng)網(wǎng)絡(luò)參數(shù)辨識(shí)模塊等。在控制系統(tǒng)中ud、uq、id、iq作為MRAS的輸入,ωeE是MRAS輸出值。ud、uq、id、iq為Adaline神經(jīng)網(wǎng)絡(luò)的輸入量,經(jīng)Adaline神經(jīng)網(wǎng)絡(luò)模塊,測(cè)量出電機(jī)運(yùn)行時(shí)的電機(jī)參數(shù)。利用該辨識(shí)值修正無(wú)傳感器控制系統(tǒng)中的模型參數(shù),按照上節(jié)仿真過(guò)程進(jìn)行仿真實(shí)驗(yàn),得到的仿真結(jié)果見(jiàn)圖9。
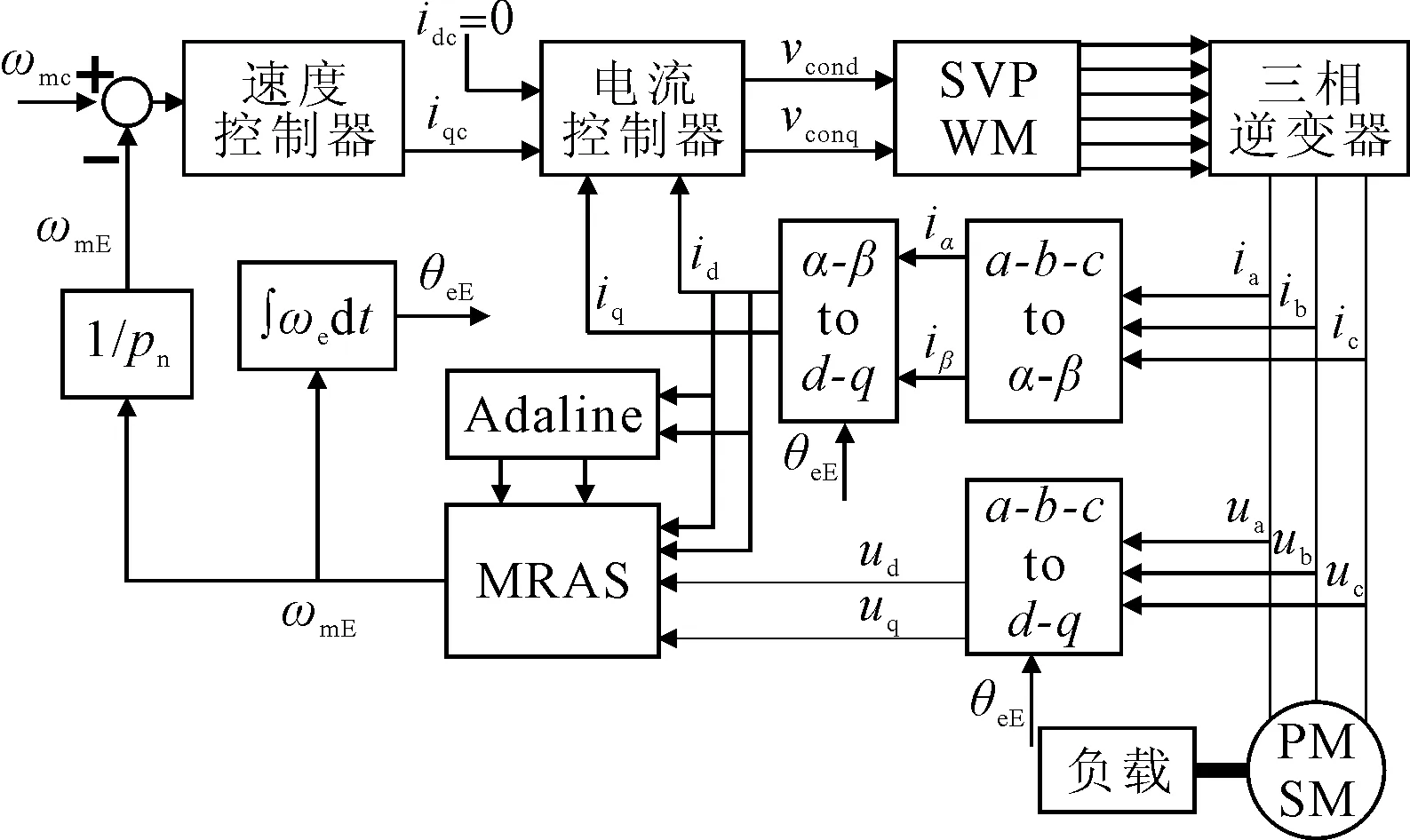
圖8 基于參數(shù)辨識(shí)的PMSM模型參考自適應(yīng)控制系統(tǒng)圖
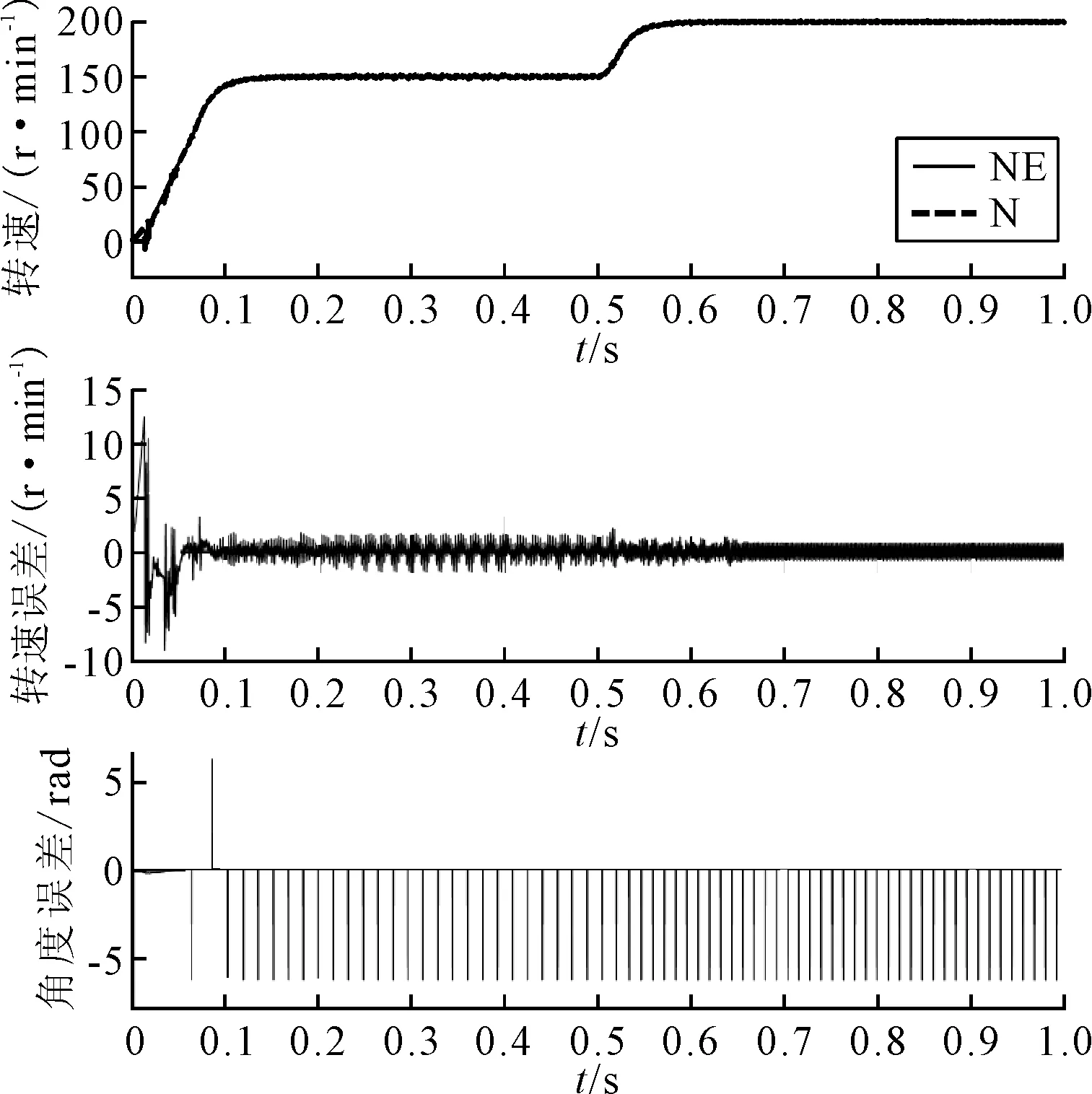
圖9 基于參數(shù)辨識(shí)的PMSM模型參考自適應(yīng)控制仿真結(jié)果
由圖9可知,當(dāng)轉(zhuǎn)速變化時(shí),使用Adaline神經(jīng)網(wǎng)絡(luò)對(duì)模型參數(shù)進(jìn)行修正,可有效提高M(jìn)RAS對(duì)轉(zhuǎn)子轉(zhuǎn)速和轉(zhuǎn)子位置的估測(cè)精度。同時(shí)通過(guò)對(duì)轉(zhuǎn)速變化曲線的分析,基于參數(shù)辨識(shí)的PMSM模型參考自適應(yīng)控制系統(tǒng)使轉(zhuǎn)速更加平滑。
仿真過(guò)程中電機(jī)定子電阻、電感和轉(zhuǎn)子磁鏈的參數(shù)辨識(shí)見(jiàn)圖10。
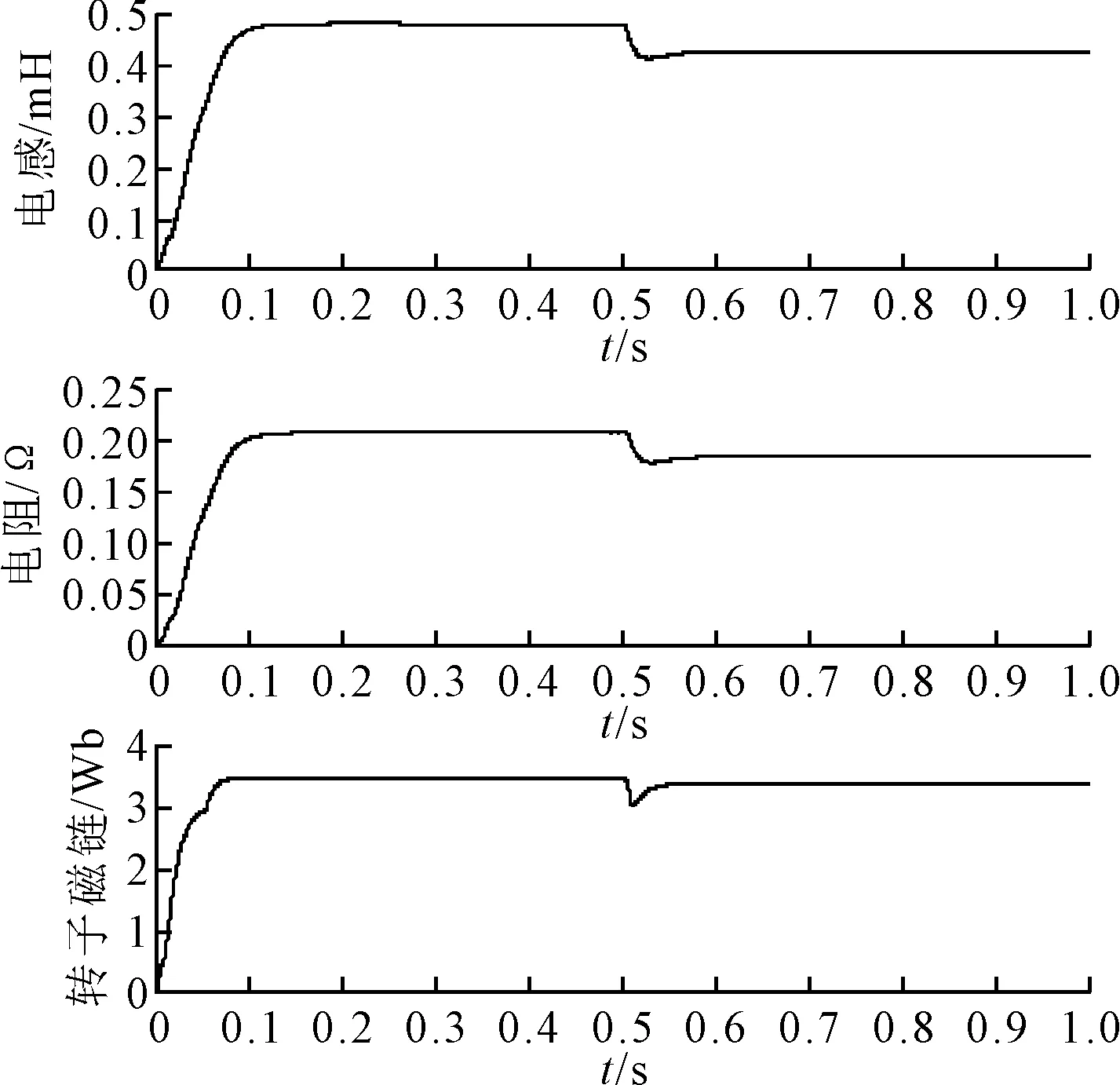
圖10 參數(shù)辨識(shí)曲線
由圖10可知使用Adaline神經(jīng)網(wǎng)絡(luò)參數(shù)辨識(shí)在電機(jī)穩(wěn)定運(yùn)行時(shí)響應(yīng)速度快,檢測(cè)精度高,可以很好地檢測(cè)電機(jī)運(yùn)行時(shí)的狀態(tài)參數(shù),滿足該控制系統(tǒng)的設(shè)計(jì)要求。
4 結(jié)論
在船舶推進(jìn)電機(jī)的控制系統(tǒng)中,使用MRAS估測(cè)電機(jī)轉(zhuǎn)速擺脫了對(duì)機(jī)械傳感器的依賴,可提高船舶航行的安全性。使用Adaline神經(jīng)網(wǎng)絡(luò)實(shí)時(shí)修正MRAS中的模型參數(shù),可提高M(jìn)RAS對(duì)電機(jī)轉(zhuǎn)速的估測(cè)精度。通過(guò)利用Simulink進(jìn)行仿真驗(yàn)證,結(jié)果表明,基于參數(shù)辨識(shí)的PMSM模型參考自適應(yīng)控制系統(tǒng)提高了對(duì)電機(jī)轉(zhuǎn)速的估測(cè)精度,并保持控制系統(tǒng)具有很好的抗干擾能力。面對(duì)船舶智能化的發(fā)展趨勢(shì),船舶推進(jìn)電機(jī)的無(wú)傳感器控制需進(jìn)一步提高電機(jī)轉(zhuǎn)速的估測(cè)精度。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19