淺水觀察小型ROV結構設計與優化
2023-04-27 13:07:26張賀賀張寶雷孫冰
船海工程 2023年2期
張賀賀,張寶雷,孫冰
(中海油能源發展股份有限公司采油服務分公司,天津 300452)
近年來水下機器人的應用相當廣泛,如:海洋資源開發、海底打撈、水上養殖,以及江河湖泊大壩的檢修等[1]。因為水下機器人的工作效率高,且更具安全性,所以水下機器人取代人工進行水下作業越來越普遍。但是大部分水下機器人都是應用于深海軍事領域,進行石油開采、水雷探測、沉船打撈等水下作業任務,具有體積龐大、價格昂貴等特點,無法適用于江河、湖泊等淺水域。小型水下機器人代替人工在淺水域進行作業,不僅可保障水下作業人員的生命安全,還可提高工作效率[2],因此,考慮在現有研究的基礎上,設計一款外形小巧美觀、航行阻力低、機動性能好、便于攜帶的小型ROV,以期通過搭載相應的傳感器,便能夠完成水質檢測、地質勘測、水下攝影與搜索、水面監視與巡航等淺水作業任務。
1 小型ROV設計方案
1.1 總體設計方案
總體設計方案見圖1,包括整體外形設計、密封耐壓艙結構設計及推進器布局設計、電控系統的選型。主要技術要求見表1。

表1 相關技術指標

圖1 小型水下機器人設計方案
1.2 整體外形設計及水動力分析
1.2.1 整體外形設計
水下機器人的外形設計應考慮盡可能減小阻力,提高航行速度和整體續航能力[3-4]。所設計的淺水觀察水下機器人整體外形為扁平流線型,并在兩側設計擋板,既能減小航行阻力,又能保證航行時的平穩性。外框架采用含玻纖加強PP側板及底部鋁梁一體式框架設計,該材料具有密度小、吸水率低、強度韌性好的特點。底部鋁梁采用6061-T6鋁合金,采用梁設計具有剛性好,阻水面小的優點,同時對鋁梁進行硬質陽極氧化處理,增大框架的耐腐蝕性。見圖2。
圖2 小型水下機器人外形設計
1.2.2 根據Fluent水動力分析進行結構優化
水下的環境導致水下機器人運動有較強的非線性和耦合性特點。水流沿著水下機器人的表面移動,并伴隨著渦的產生和脫落,不斷地有能量隨之耗散。準確得出流體對水下機器人的作用力對于自身的功耗、姿態控制以及推進器的選型至關重要。當水下機器人在水下運動時,流體的作用力與自身的運動速度呈非線性關系,通常情況下不能直接數值求解。而模型試驗的方法在前期設計階段需要耗費大量的資金、時間及人力成本,且對試驗條件也有很高的要求。因此,對于水下機器人進行精確的流體運動仿真分析具有重要的意義。
采用Fluent軟件分析所設計的小型水下機器人在水下航行時,小型水下機器人所受到壓力及速度。小型機器人在水下以1 m/s航行時受到的壓力見圖3,航行時的速度變化見圖4。

圖4 小型水下機器人1 m/s的速度矢量圖
不同航行速度下水下機器人的航行阻力見表2。

表2 不同航行速度下水下機器人的航行阻力
由表2可以看出,隨著速度的增加,航行阻力成指數增長,因此考慮對水下機器人的結構進行優化,減小其所受到的阻力,提高續航能力。優化后的水下機器人結構模型見圖5。

圖5 優化后水下機器人三維模型
將水下機器人的進水口進行鏤空,不僅可減小了質量,還可保證進水量,提高推進器的推進效率。
由圖6可知,優化后的結構進一步降低了航行時水下機器人所受到的阻力,保證了續航能力。

圖6 優化后水下機器人航行速度與航行阻力的關系
1.2.3 小型ROV密封耐壓艙結構設計
小型水下機器人密封耐壓艙的內部布局圖見圖7,材料選用亞克力材料,其具有良好的機械性能及耐壓強度,且密度較小,質量輕,同時又能保證較強的耐腐蝕性能。

圖7 小型水下機器人密封耐壓艙的內部布局
采用Fluent對不同深度下(150 m、200 m)密封艙受到的應力及位移進行了仿真,具體見圖8。
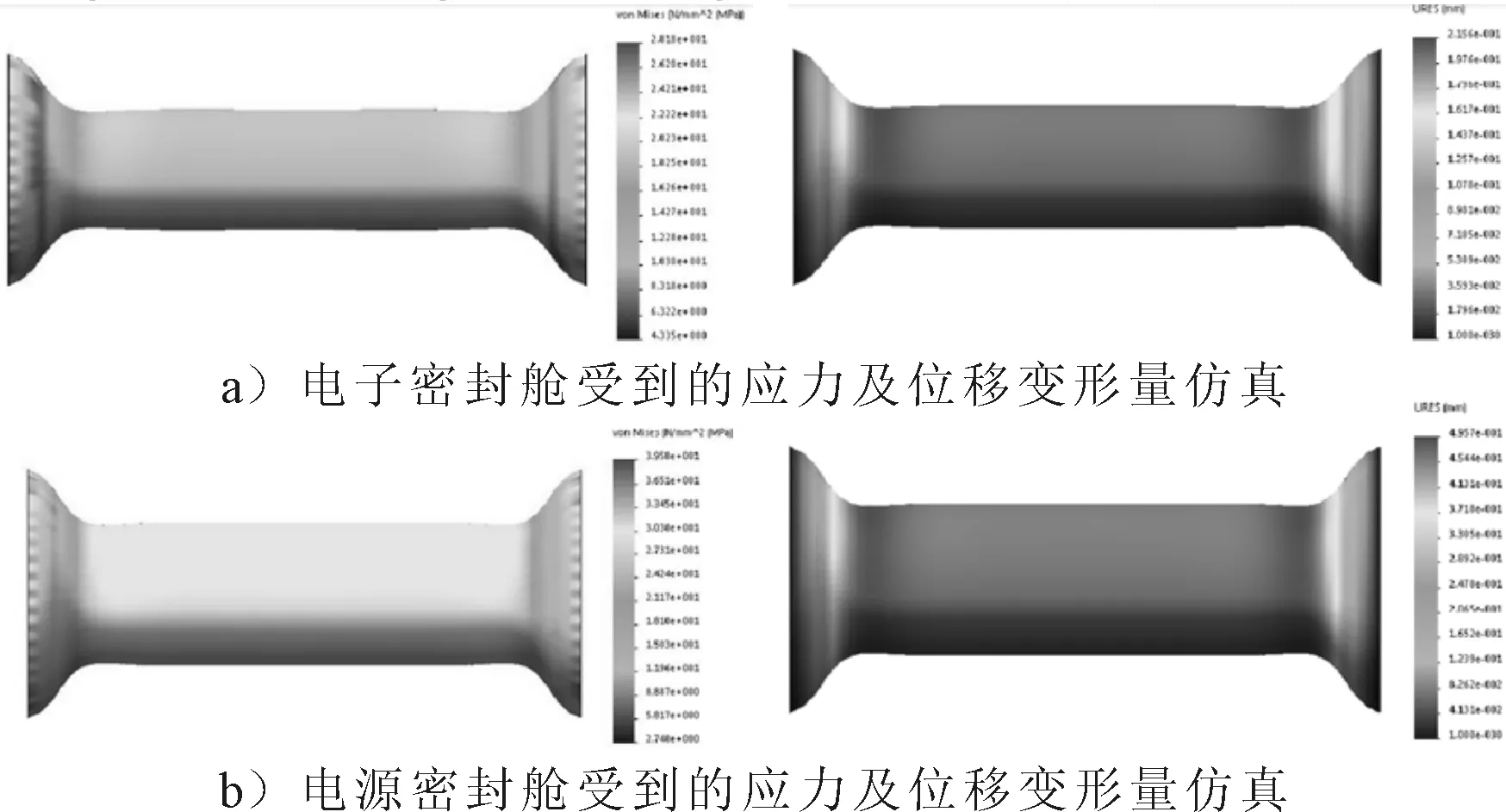
圖8 密封艙受到的應力及位移變形量仿真
由圖8可以看出,小型淺水觀察水下機器人在水下深度200 m時,所受的最大壓力小于40 MPa,位移變形量極小,本文選用的亞克力材料耐壓可達60 MPa,因此整體內部布局及材料選用滿足實際工況要求。
水下艙體外殼采用6061鋁制材料,可提供水下200 m的耐壓能力,左右兩端分別安裝有6個水密接插件,用于連接水下推進器、臍帶纜和水下艙體。水密接插件均選用國際知名品牌產品,壽命長、質量穩定。其中臍帶纜主連接器采用額外的固定外殼加強固定,防止臍帶纜的來回擺動造成連接器損壞。水下艙體為推進器及其他水下設備供電。
1.3 推進器結構設計及電控系統的選型
1.3.1 推進器結構設計
推進器由3個推進器構成,其中包含1個垂直推進器和2個水平推進器,具體布局見圖9。

圖9 推進器結構設計
這個3個推進器能夠保證水下機器人實現水下航行的進退、潛伏及轉向,保證水下作業的靈活性,3個推進器能夠保證較好的控制效果,實現穩定的水下觀察。其中2個水平推進器可實現正反轉,實現水下機器人的前進及后退,當2個推進器1個正向轉動,另外1個反向轉動,即可實現水下機器人的轉向功能;垂直推進器也可以實現正反轉,實現水下機器人的上浮及下潛。
1.3.2 電控選型
水下機器人的電控系統主要包括控制器、傳感器及電調、攝像頭、電源等。選用Pixhawks作為主控制器,實現對小型ROV的運動控制,選用水下專用的外轉子無數電機及螺旋槳作為推進器,螺旋槳轉速與推力見圖10。

圖10 螺旋槳轉速與推力
攝像頭采用CSI攝像頭,能保證水下正常高清拍攝,電源選用高能量密度電池,從而能保證1 h的持續供電。
2 實驗測試
水池實驗將驗證水下機器人的運動能力、方向感知能力及航行狀態。通過這些實驗結果,可直觀驗證設計方法的準確度,不斷通過微調設計方案,從而得到理想的設計方案,并最終形成獨有知識產權的設計經驗。
2.1 運動功能測試
運動功能的測試方法有:①水下機器人放置在水池中,水面控制單元通過臍帶纜與水下機器人建立通信后,水面控制單元應能夠在屏幕上顯示水下機器人水下姿態數據、部件工作狀態反饋值以及監控視頻等內容;②在空載下,輸入相關控制指令控制水下機器人完成水平功能要求中規定的三軸運動和三軸旋轉等相關運動,水下機器人的動作應與輸入指令協調一致;③按照作業型水下機器人的作業功能,輸入相關指令控制水下機器人,應能完成功能要求中的三軸運動和三軸旋轉等動作,實現作業功能。
運動功能的測試結果為:①通信正常、數據反饋有效;②ROV動作和輸入指令協調一致;③操縱模式切換有效,導航模式切換有效;④定深觀察穩定,ROV無頻繁晃動。
2.2 云臺角度測試
云臺角度測試方法:PCU控制云臺正負最大值,查看上位機反饋云臺實際角度與測量角度是否一致。云臺角度測試結果,實際角度與控制角度一致為±90°。
2.3 航向、姿態及航速測試
航向、姿態及航速測試有:①磁導校準后,設備0度航向與地磁北極一致運動30 min,設備同一艏向角且同一位置時原航向角度與現航向角度偏差實測慣導校準后,設備0度航向與上電時所處方向一致,設備水下運動30 min,設備同一艏向角時原航向角度與現航向角度偏差實測功率;②設備在水平地面放置,觀察本體實際橫滾、俯仰值;③通過計米器和秒表進行記錄并計算出設備航速,每航行10 m記錄一次時間共記錄3次,初始10 m不計用作加速區間,航行3次共9組數據取其中5組有效數據取平均值,并記錄最大值。
航向、姿態及航速測試結果:①磁導校準后,設備0度航向與地磁北極一致運動30 min,設備同一艏向角且同一位置時原航向角度與現航向角度偏差實測,穩定后角度偏差為7°左右,慣導校準后,設備0度航向與上電時所處方向一致,設備水下運動30 min,設備同一艏向角時原航向角度與現航向角度偏差穩定后為5°左右;②設備在水平地面放置,水面姿態測試結果為:俯仰橫滾為0°;③航速值數據:前行2.12 m/s,后退0.59 m/s,右側0.26 m/s,左側0.21 m/s。
3 結論
淺水觀察小型ROV雖然可以通過水下動力學仿真、優化結構設計有效降低航行阻力、提高續航能力,但自身動力和體積存在閾值極限,只適用于水下流速相對較小的水域,若要取得更高運動性能,推力和體積重量的增大是避不開的問題。在此之前多數小型水下機器人均采用框架型結構,設備整體迎流面積較大,造成水阻增大航速下降,本設計方案采用流線型設計可有效降低水阻的同時減小體積,增強了運動性能。這種設計方案對于狹窄水下空間的檢測維修具有實用價值,下一步應考慮針對特定應用場景對推進器布局和推力進行進一步優化,通過搭配不同的傳感器,滿足各類應用場景的實際需求,實現產業化應用。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:26:08
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00