菲律賓蛤仔清洗分級(jí)整機(jī)設(shè)計(jì)及參數(shù)優(yōu)化
2023-04-23 01:10:18潘瀾瀾黃煒雯王泳杰李秀辰張國(guó)琛
漁業(yè)現(xiàn)代化 2023年2期
潘瀾瀾,黃煒雯,王泳杰,母 剛,李秀辰,張國(guó)琛
(1 大連海洋大學(xué)機(jī)械與動(dòng)力工程學(xué)院,遼寧 大連 116023;2 設(shè)施漁業(yè)教育部重點(diǎn)實(shí)驗(yàn)室(大連海洋大學(xué)),遼寧 大連 116023;3 遼寧省海洋漁業(yè)裝備專業(yè)技術(shù)創(chuàng)新中心,遼寧 大連 116023)
菲律賓蛤仔(Ruditapesphilippinarum)是中國(guó)重要的灘涂貝類養(yǎng)殖品種,2021年中國(guó)灘涂貝類養(yǎng)殖總面積為5.85×105hm2,其中菲律賓蛤仔養(yǎng)殖面積為3.84×105hm2,占灘涂貝類養(yǎng)殖總面積的64%[1]。
清洗與分級(jí)是貝類捕撈后處理的必要環(huán)節(jié),清洗與分級(jí)設(shè)備的開(kāi)發(fā)是產(chǎn)業(yè)效率提升的關(guān)鍵[2]。國(guó)內(nèi)外學(xué)者開(kāi)展了貝類清洗、分級(jí)設(shè)備研制,分級(jí)方式較具有代表性的有柵條式分級(jí)機(jī)、滾筒式分級(jí)機(jī)、振動(dòng)篩式分級(jí)機(jī)、滾杠式分級(jí)機(jī)。意大利研制的Italy-001-A型分級(jí)機(jī)[3]利用傳送帶將貝殼按大小進(jìn)行無(wú)級(jí)分級(jí)。日本橫崎公司的自動(dòng)分級(jí)機(jī)[4]可將各種海鮮類制品根據(jù)重量大小的不同分成不同的等級(jí)。日本三菱公司研制的雙殼貝類分級(jí)機(jī)[5]利用傳感器綜合測(cè)出貝類的重量、形狀和大小,與計(jì)算機(jī)中設(shè)定的數(shù)據(jù)進(jìn)行對(duì)比篩分貝類。
國(guó)內(nèi)對(duì)貝類單作業(yè)的清洗、分級(jí)設(shè)備研制較多。史增錄等[6]設(shè)計(jì)了柵條滾筒式貝類分級(jí)機(jī),新疆農(nóng)業(yè)機(jī)械研究所研究了6FG-3000型滾杠式貝類分級(jí)機(jī)[7]。歐陽(yáng)杰等[8]對(duì)蛤類滾筒分級(jí)工藝參數(shù)進(jìn)行研究,發(fā)現(xiàn)影響最小的是滾筒轉(zhuǎn)速。滾筒式分級(jí)設(shè)備結(jié)構(gòu)簡(jiǎn)單,可連續(xù)工作,其分級(jí)精度受滾篩結(jié)構(gòu)及運(yùn)行參數(shù)影響,而分級(jí)設(shè)備的準(zhǔn)確率是其研制的關(guān)鍵。清洗方法主要有高壓清洗、滾刷清洗和超聲波清洗等。目前國(guó)內(nèi)已經(jīng)研制了滾筒清洗[9]、高壓噴淋式貝類清洗[10]、牡蠣殼清洗[11]等清洗設(shè)備。董佳旭等[12]設(shè)計(jì)了一種多作用式貝類清洗機(jī),在工作中可將清洗好的扇貝輸送出來(lái),提高了清洗效率。胡秋生等[13]設(shè)計(jì)的噴刷式貝類清洗機(jī),采用了帶螺旋板和毛刷的清洗刷輥及蝸輪—蝸桿傳動(dòng)形式,解決了人工清洗勞動(dòng)強(qiáng)度低的問(wèn)題。蔡維等[14]設(shè)計(jì)的基于水射流貝類清洗機(jī)械,醫(yī)用水箱中的壓力結(jié)合氣罐釋放出高壓氣流,使高壓水通過(guò)噴嘴射出來(lái),可將貝類表面淤泥清洗掉。不同的清洗設(shè)備的運(yùn)行參數(shù)、清洗方式對(duì)清洗效果影響顯著。也有學(xué)者對(duì)清洗分級(jí)一體設(shè)備進(jìn)行研究,采用高壓氣流將扇貝表層污物吹走清除,此設(shè)備毛刷輥的長(zhǎng)度、傾角都可調(diào)節(jié),提高了分級(jí)的適應(yīng)性[15]。鮑成偉等[16]設(shè)計(jì)了一種蛤蜊分級(jí)除雜裝置,利用離心法和密度原理,解決了蛤蜊分級(jí)清洗及去除雜質(zhì)的問(wèn)題。貝類清洗分級(jí)一體機(jī)的面臨著產(chǎn)品功能單一,自動(dòng)化程度低,并且分級(jí)精度不高和破損率的問(wèn)題,即裝置分級(jí)精度無(wú)法達(dá)到90%以上且破損率約3%[17-18]。因此提高實(shí)際貝類清洗分級(jí)過(guò)程中的分級(jí)精度,減少破損率,實(shí)現(xiàn)其高效率、高品質(zhì)的清洗分級(jí)十分必要。
本研究針對(duì)蛤仔形態(tài)特性,設(shè)計(jì)了一套清洗分級(jí)一體機(jī)并優(yōu)化整機(jī)結(jié)構(gòu)及運(yùn)行參數(shù),以提高實(shí)際工作中的分級(jí)精度,減少破損率,實(shí)現(xiàn)對(duì)菲律賓蛤仔的高效率、高品質(zhì)的清洗分級(jí)。
1 清洗分級(jí)整機(jī)工作原理
清洗分級(jí)機(jī)主要由上料、清洗、送料、分級(jí)四部分構(gòu)成(圖1)。蛤仔從喂料池投入進(jìn)入清洗部分,完成清洗作業(yè)后進(jìn)入分級(jí)環(huán)節(jié),蛤仔在滾筒篩內(nèi)沿滾筒壁向前運(yùn)動(dòng),完成菲律賓蛤仔的清洗分級(jí)。

圖1 菲律賓蛤仔清洗分級(jí)一體機(jī)結(jié)構(gòu)示意圖Fig.1 Structural diagram of Ruditapes philippinarum cleaning and grading machine
2 關(guān)鍵部件及運(yùn)動(dòng)學(xué)結(jié)構(gòu)分析
2.1 滾筒篩結(jié)構(gòu)設(shè)計(jì)
2.1.1 滾筒篩分級(jí)總體結(jié)構(gòu)
分級(jí)部分主要由滾筒篩、從動(dòng)輥軸、出料口、傳動(dòng)電機(jī)、傳動(dòng)鏈、主動(dòng)滾軸和機(jī)架組成(圖2)。

圖2 菲律賓蛤仔分級(jí)部分結(jié)構(gòu)Fig.2 Hierarchical structure of Ruditapes philippinarum
2.1.2 蛤仔在滾筒篩的受力分析
將菲律賓蛤仔外形近似為一個(gè)球體,以蛤仔的質(zhì)心P為原點(diǎn),滾筒篩切向?yàn)閄軸方向,滾筒篩法向?yàn)閅軸方向,其蛤仔在滾筒篩的受力如圖3所示。

圖3 蛤仔滾筒篩內(nèi)受力圖Fig.3 Internal force diagram of Ruditapes philippinarum drum screen
當(dāng)蛤仔在篩筒內(nèi)做圓周運(yùn)動(dòng)時(shí),在升角為某一值時(shí),蛤仔P沿滾筒壁向下滾動(dòng)的臨界條件是:
FC+mgsinα=F
(1)
經(jīng)簡(jiǎn)化后可得:
(2)
式中:μ為蛤仔與滾筒表面的摩擦系數(shù);α為蛤仔的升角;m為物料的質(zhì)量,kg;g為重力加速度,m/s2;R為滾筒的半徑,m;ω為物料運(yùn)動(dòng)的角速度,rad/s;F為F推和fB的合力。
式(2)表示蛤仔在篩筒內(nèi)的升角α大于某一值時(shí),蛤仔可以沿著篩筒壁轉(zhuǎn)動(dòng)進(jìn)行向下滾動(dòng)分級(jí)。經(jīng)計(jì)算,升角為2°~6°時(shí),蛤仔在篩筒內(nèi)沿筒壁均勻向前運(yùn)動(dòng),可見(jiàn)蛤仔在筒內(nèi)翻動(dòng)與過(guò)篩均有效[19]。
2.1.3 滾筒篩直徑及長(zhǎng)度確定
滾筒篩直徑、長(zhǎng)度是滾筒篩的主要核心參數(shù),決定著蛤仔分級(jí)的效率和分級(jí)精度[20-21]。滾筒篩長(zhǎng)度過(guò)短,蛤仔不能充分分級(jí);滾筒篩直徑過(guò)小,分級(jí)效率下降。
當(dāng)滾筒篩轉(zhuǎn)速為n時(shí),蛤仔軸向移動(dòng)速度為[20]:
v=nx=DKvtanθ
(3)
式中:Kv為速度修正系數(shù)
取θ=3°時(shí),Kv=1.35,當(dāng)θ=5°,Kv=1.85,滾筒直徑表示為:
(4)
式中:Qm為進(jìn)料率,kg/m3;θ為滾筒傾角,(°);Kv為速度修正系數(shù);db為容積密度,kg/m3;F為填充率。
在菲律賓蛤仔的分級(jí)過(guò)程中,蛤仔分級(jí)的有效區(qū)域接近1/3圓周[22],取整滾筒篩直徑800 mm。為了充分篩分,延長(zhǎng)蛤仔在滾筒一級(jí)分級(jí)的停留時(shí)間,第一級(jí)篩網(wǎng)長(zhǎng)度為1 000 mm,二級(jí)篩網(wǎng)長(zhǎng)度為860 mm。
2.1.4 篩孔尺寸及排列方式確定
在保證滾筒篩強(qiáng)度、剛度的條件下,采用45°錯(cuò)排時(shí)篩面有效面積最大,分級(jí)更充分[23]。蛤仔轉(zhuǎn)動(dòng)時(shí)在滾筒內(nèi)也會(huì)進(jìn)行自轉(zhuǎn),通過(guò)分析蛤仔下落時(shí)的兩種狀態(tài)(圖4),結(jié)合菲律賓蛤仔殼長(zhǎng)、殼寬參數(shù),最終滾筒篩的篩孔確定為23 mm、28 mm。為防止蛤仔在滾筒中容易造成堆積,影響分級(jí)效率,以滾筒篩中軸為中心,安裝一個(gè)長(zhǎng)13 cm,高3 cm的鋼板,軸向布置三排(圖5)。
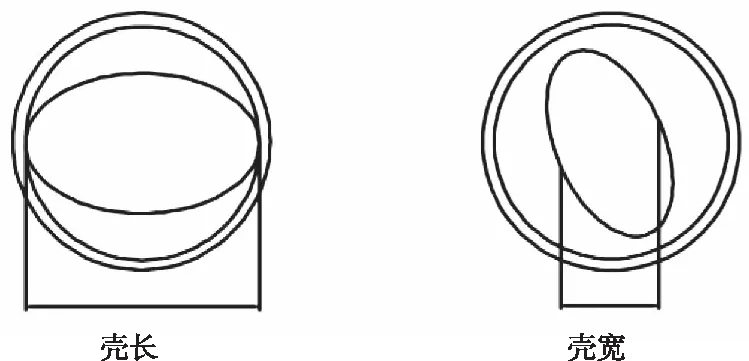
圖4 菲律賓蛤仔下落示意圖Fig.4 Schematic diagram of Ruditapes philippinarum
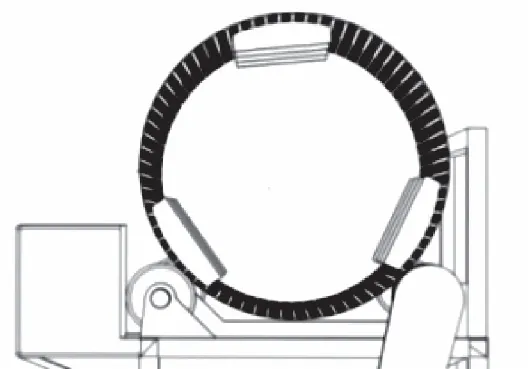
圖5 滾筒篩內(nèi)結(jié)構(gòu)示意圖Fig.5 Schematic diagram of inner structure of drum screen
2.2 清洗機(jī)結(jié)構(gòu)及關(guān)鍵部件設(shè)計(jì)
2.2.1 清洗總體結(jié)構(gòu)
菲律賓蛤仔清洗裝置結(jié)構(gòu)如圖6所示。

圖6 菲律賓蛤仔清洗裝置結(jié)構(gòu)Fig.6 Cleaning device structure of Ruditapes philippinarum
清洗部分主要由傳送帶、步進(jìn)電機(jī)、擺針輪減速器、機(jī)架、毛刷輥、高壓噴嘴、水泵、濾水箱、過(guò)濾網(wǎng)等零部件組成。為防止蛤仔滑落作用,在送料傳送帶網(wǎng)帶上每隔400 mm,設(shè)置高30 mm的鋼板;在毛刷輥下方的濾水箱上安裝600目、1 000目過(guò)濾網(wǎng),循環(huán)泵將過(guò)濾后的水從噴嘴噴出循環(huán)利用。
2.2.2 高壓噴淋機(jī)構(gòu)及毛刷輥選型
噴嘴作為清洗部分的關(guān)鍵執(zhí)行元件,結(jié)合圓柱形噴嘴既能聚集能力又能聚集射擊,可以獲得最大打擊力的優(yōu)點(diǎn)[24-25]。為減少高壓水射流在噴嘴中的壓力損失,因此選用圓柱形噴嘴,并配以壓力為10 MPa,額定流量96 L/min、泵速332 r/min、功率為18 kW的柱塞泵。高壓噴淋機(jī)構(gòu)如圖7所示。

圖7 高壓噴淋機(jī)構(gòu)Fig.7 High pressure spray structure
高壓射流清洗公式如下:
(5)
式中:d為噴嘴內(nèi)徑,mm;Q為清洗蛤仔時(shí)高壓柱塞泵的額定流量,L/min;P為高壓柱塞泵的額定壓強(qiáng),MPa;n為噴嘴個(gè)數(shù);U為噴嘴結(jié)構(gòu)系數(shù),0.6~0.7。
取Q=90 L/min,U=0.6,n=66,P=3 MPa,將數(shù)據(jù)代入公式中,d=1.2 mm,取d=1.5 mm。
當(dāng)入射角為90°時(shí),打擊力最大,清洗效果最好,因此噴嘴垂直向下安裝[26]。當(dāng)靶距為噴嘴直徑100倍時(shí),射流打擊力最大,噴嘴直徑為1.5 mm,則靶距為150 mm,噴嘴每排3個(gè),22排,共66個(gè)噴嘴。
蛤仔經(jīng)過(guò)上料區(qū)進(jìn)入清洗區(qū)域通過(guò)毛刷輥的作用力進(jìn)行清洗,蛤仔在毛刷輥上受到5個(gè)力,分別是蛤仔自身重力mg,兩毛刷輥的支持力FN1、FN2,以及兩個(gè)摩擦力f1、f2,將蛤仔近似為一個(gè)橢圓,a、b、c分別代表橢圓長(zhǎng)軸距離、短軸距離、焦距、l為周長(zhǎng)。
合力矩為:
mo2=FN1(a+b+c)2sin(α-θ)-mgαsinθ-f1l+αcos(α+θ)>0
(6)
合力矩mo2是對(duì)蛤仔在毛刷輥上所受支持力、摩擦力以及其他所有分力的力矩的代數(shù)和,其大于零,蛤仔在毛刷輥的摩擦作用下向前運(yùn)動(dòng),通過(guò)毛刷輥進(jìn)一步清洗蛤仔代謝物,并輸送至分級(jí)環(huán)節(jié),刷洗裝置毛刷輥材料采用PA1010[27],設(shè)置為26組,直徑110 mm,總長(zhǎng)度2 600 mm。
菲律賓蛤仔毛刷輥上受力如圖8所示。

圖8 菲律賓蛤仔毛刷輥上受力示意圖Fig.8 Force diagram onRuditapes philippinarum brush roller
3 EDEM離散元仿真及優(yōu)化試驗(yàn)
3.1 離散元仿真試驗(yàn)設(shè)計(jì)
為開(kāi)展清洗分級(jí)機(jī)整機(jī)分級(jí)精度優(yōu)化,開(kāi)展毛刷輥轉(zhuǎn)速、滾筒篩轉(zhuǎn)速和滾筒篩傾角參數(shù)的仿真,忽略蛤仔顆粒與蛤仔顆粒之間的粘附力,選擇Hert-Mindlin無(wú)滑動(dòng)接觸模型[28],用多球形顆粒填充蛤仔模型,建立菲律賓蛤仔離散元仿真(EDEM) 模型如圖9所示。

圖9 菲律賓蛤仔清洗分級(jí)過(guò)程仿真試驗(yàn)?zāi)P虵ig.9 Test model of cleaning and grading simulation process for Ruditapes philippinarum
確定蛤仔和鋼的基本物理和力學(xué)性能參數(shù)相關(guān)仿真參數(shù)(表1、表2)[29]。用EDEM后處理Selection模塊在所創(chuàng)建平面上方建立Bin Group,統(tǒng)計(jì)一定時(shí)間內(nèi)在每級(jí)收料斗區(qū)域內(nèi)蛤仔的數(shù)量[31]。
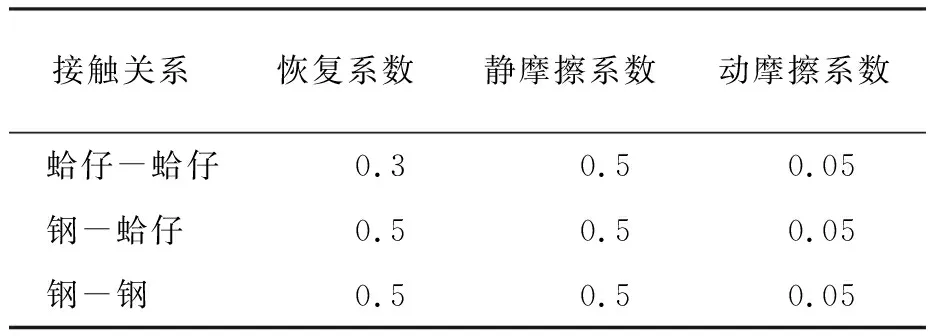
表1 材料間的接觸參數(shù)Tab.1 The contact parameters of materials
分析毛刷輥轉(zhuǎn)速、滾筒篩轉(zhuǎn)速和滾筒篩傾角對(duì)分級(jí)精度的影響,結(jié)合仿真結(jié)果,確定菲律賓蛤仔清洗分級(jí)裝置結(jié)構(gòu)參數(shù)的最優(yōu)組合。
為探討菲律賓蛤仔的分級(jí)效果,以分級(jí)精度作為評(píng)價(jià)指標(biāo),計(jì)算公式為:
(6)
式中:P為分級(jí)精度;n為正確落入目標(biāo)料斗的總數(shù)目;N為試驗(yàn)總的顆粒目數(shù)。
分別以毛刷輥轉(zhuǎn)速、滾筒篩轉(zhuǎn)速和滾筒篩傾角為試驗(yàn)因素,以分級(jí)精度作為評(píng)價(jià)指標(biāo),進(jìn)行分級(jí)作業(yè)的離散元仿真。由于篩筒傾角影響蛤仔在篩面上縱向運(yùn)動(dòng)的加速度,滾筒篩傾角過(guò)大或過(guò)小都會(huì)造成分級(jí)不充分[32]。
當(dāng)傾角增大時(shí),加速度也增加,蛤仔通過(guò)篩面的時(shí)間短,蛤仔不能充分過(guò)篩,造成分級(jí)不完全。當(dāng)傾角增大到一定值時(shí),蛤仔在篩面上跳動(dòng)劇烈,會(huì)增加蛤仔破損率。傾角過(guò)小,蛤仔向前運(yùn)動(dòng)緩慢,產(chǎn)生堆積。結(jié)合蛤仔在滾筒內(nèi)的受力分析,確保蛤仔充分分級(jí),確定滾筒篩傾角范圍2°~4°。蛤仔在滾筒篩內(nèi)做軸向運(yùn)動(dòng),在蛤仔所受重力與離心力相等范圍內(nèi)設(shè)定篩筒轉(zhuǎn)速, 因此篩筒調(diào)速范圍設(shè)定10~20 r/min。由于清洗作業(yè)時(shí)蛤仔停留時(shí)間影響清洗效果,與毛刷輥的轉(zhuǎn)速尺寸相關(guān),本機(jī)毛刷輥為26組,總長(zhǎng)度為2 600 mm,當(dāng)毛刷輥為2~4 r/min時(shí),保證了蛤仔清洗停留時(shí)間,可有效地沖刷掉蛤仔表面的泥沙。依據(jù)上述分析,運(yùn)用Design-Expert軟件進(jìn)行響應(yīng)面優(yōu)化試驗(yàn)設(shè)計(jì),擬定3種因素的水平范圍,分級(jí)試驗(yàn)方案如表 3所示。

表3 試驗(yàn)方案及結(jié)果Tab.3 Test scheme and results
3.2 試驗(yàn)結(jié)果與分析
菲律賓蛤仔分級(jí)作業(yè)的EDEM仿真結(jié)果如圖10所示,經(jīng)過(guò)后處理將滾筒中的蛤仔進(jìn)行顏色標(biāo)記,并在出料口邊緣設(shè)置收集箱,通過(guò)計(jì)算可以準(zhǔn)確得出在不同參數(shù)條件下蛤仔的分級(jí)情況。
響應(yīng)面模型ANOVA分析如表4所示。
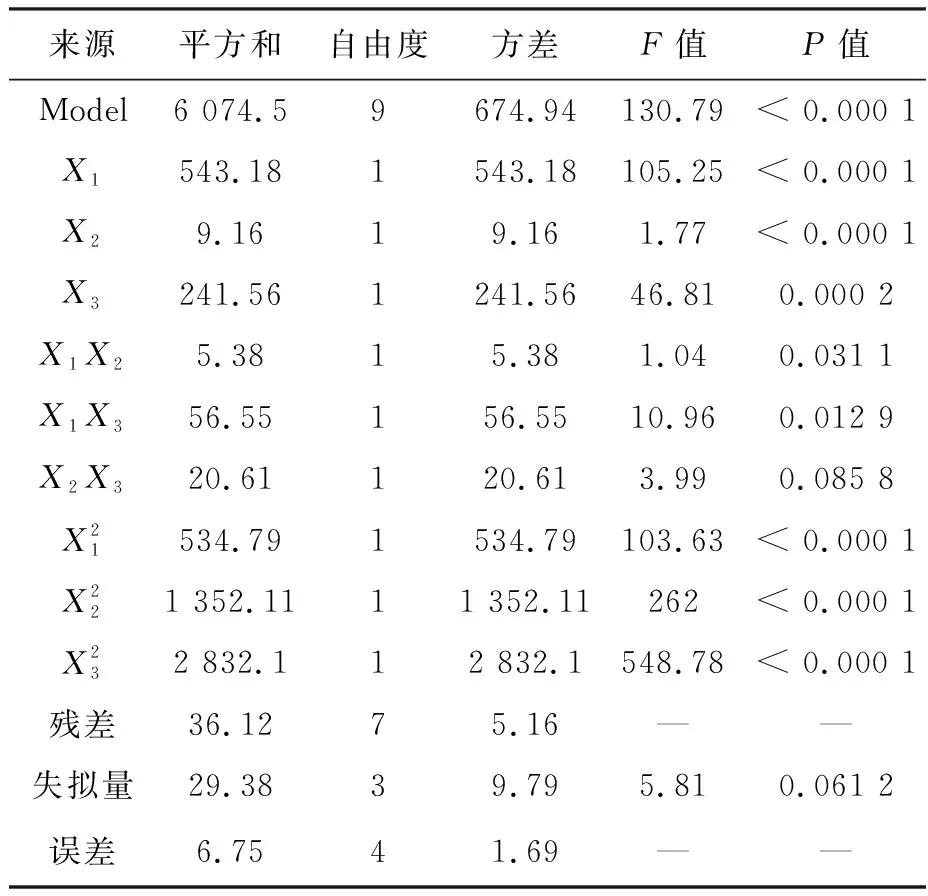
表4 響應(yīng)面模型ANOVA分析Tab.4 Response surface model ANOVA analysis
運(yùn)用Design Expert軟件進(jìn)行回歸分析,建立各因素關(guān)于蛤仔分級(jí)精度的影響程度的擬合方程,并進(jìn)行響應(yīng)面分析,探究影響因素交互作用對(duì)分級(jí)精度的影響規(guī)律。從表4可知,所建立的回歸模型極顯著(P<0.000 1),失擬不顯著,表明模型能較好地反映各因素對(duì)分級(jí)精度的影響,并進(jìn)行較好預(yù)估。

Yc=-236.89000+11.06800X1+114.47000X2
+9.37750X3-0.23200X1X2+0.07520X1X3
(7)
方差分析表中顯著項(xiàng)交互作用對(duì)分級(jí)精度影響的響應(yīng)面分析,結(jié)果如圖11所示。
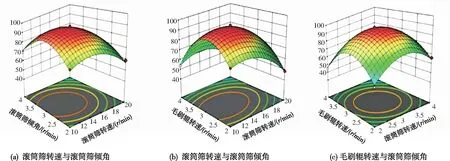
圖11 交互作用的響應(yīng)面分析Fig.11 Response surface analysis of interaction
由圖11a可見(jiàn):隨著滾筒篩轉(zhuǎn)速的增大,分級(jí)精度有上升趨勢(shì);但是增大滾筒篩傾角,分級(jí)精度反而下降。當(dāng)滾筒篩轉(zhuǎn)速在16~20 r/min之間時(shí),此時(shí)分級(jí)精度受滾筒篩轉(zhuǎn)速的影響比較明顯。隨著滾筒篩轉(zhuǎn)速減小到15 r/min時(shí)分級(jí)精度達(dá)到91%。圖11b可見(jiàn):毛刷輥轉(zhuǎn)速在2 r/min時(shí),蛤仔在毛刷輥上行駛速度緩慢,分級(jí)時(shí)間長(zhǎng);分級(jí)精度隨毛刷輥轉(zhuǎn)速增加而增加,隨滾筒篩轉(zhuǎn)速增加而下降,二者的交互作用對(duì)分級(jí)精度有明顯影響。毛刷輥轉(zhuǎn)速2~3 r/min時(shí),分級(jí)精度上升至最高點(diǎn),同時(shí)滾筒篩轉(zhuǎn)速在15 r/min后也存在下降的趨勢(shì)。圖11c可見(jiàn),設(shè)定的毛刷輥轉(zhuǎn)速范圍內(nèi),蛤仔分級(jí)精度受滾筒篩傾角的影響不明顯。
3.3 參數(shù)優(yōu)化分析
參數(shù)優(yōu)化結(jié)果如圖12所示。
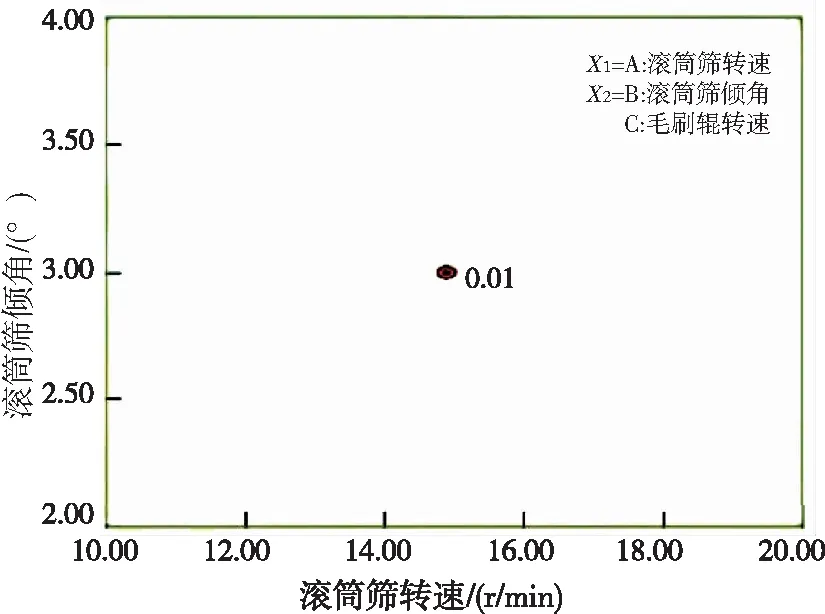
圖12 參數(shù)優(yōu)化結(jié)果圖Fig.12 Parameter optimization result diagram
根據(jù)所得的回歸方程,選擇Design-Expert軟件的中心組合響應(yīng)曲面設(shè)計(jì)進(jìn)行作業(yè)參數(shù)優(yōu)化,以菲律賓蛤仔分級(jí)精度為目標(biāo)函數(shù),尋求目標(biāo)函數(shù)的最小值。在滾筒篩傾角為3°、毛刷輥轉(zhuǎn)速為3 r/min、滾筒篩轉(zhuǎn)速為15 r/min的最優(yōu)參數(shù)條件下,裝置的蛤仔分級(jí)精度最優(yōu)仿真值為91%。
4 樣機(jī)制造及其作業(yè)試驗(yàn)
4.1 樣機(jī)制造
樣機(jī)生產(chǎn)能力可達(dá)150~200 kg/h,樣機(jī)整機(jī)主要由送料帶、減速電機(jī)、高壓清洗機(jī)構(gòu)、水泵、電控箱、滾筒篩等零件組成(圖13),選用功率0.75 kW的傳送帶電機(jī)(YE2-80M2-4)和功率2.2 kW的滾筒電機(jī)(YE2-100L-4),并配以功率3 kW,流量5.9 m3/h的離心泵(IRG40-200),滾筒篩傾角依靠機(jī)架地腳螺絲調(diào)節(jié)。

圖13 菲律賓蛤仔清洗分級(jí)樣機(jī)Fig.13 Cleaning and grading prototype of Ruditapes philippinarum
4.2 作業(yè)試驗(yàn)設(shè)計(jì)
蛤仔清洗分級(jí)過(guò)程中入料總量為100 kg,設(shè)定滾筒篩轉(zhuǎn)速15 r/min,滾筒篩傾角3°,毛刷輥轉(zhuǎn)速3 r/min,水壓3 MPa為作業(yè)參數(shù),開(kāi)展設(shè)備作業(yè)測(cè)定。
為驗(yàn)證菲律賓蛤仔分級(jí)的仿真分析結(jié)果,進(jìn)行樣機(jī)性能試驗(yàn),并重復(fù)3次。其中指標(biāo)評(píng)價(jià)采用如下方法。
(1)準(zhǔn)確率。蛤仔樣品,分級(jí)后其中準(zhǔn)確分級(jí)的個(gè)體占分級(jí)總質(zhì)量的百分比,未準(zhǔn)確分級(jí)包括錯(cuò)誤分級(jí)個(gè)體和未完成分級(jí)的個(gè)體,準(zhǔn)確率如式(8):
(8)
式中:A為準(zhǔn)確率;W0為蛤仔樣品總質(zhì)量;W1為單次試驗(yàn)后未完成分級(jí)的蛤仔數(shù)量;W2為單次試驗(yàn)后錯(cuò)分蛤仔數(shù)量。
(2)損傷率。表面有裂痕、表面打破,出現(xiàn)缺口的蛤仔質(zhì)量,占蛤仔總質(zhì)量的百分比,損傷率如式(9):
(9)
式中:G為蛤仔機(jī)械損傷率;Gs為測(cè)定中損傷蛤仔質(zhì)量;Gy為測(cè)定樣品蛤仔質(zhì)量。
作業(yè)測(cè)試現(xiàn)場(chǎng)如圖14所示。
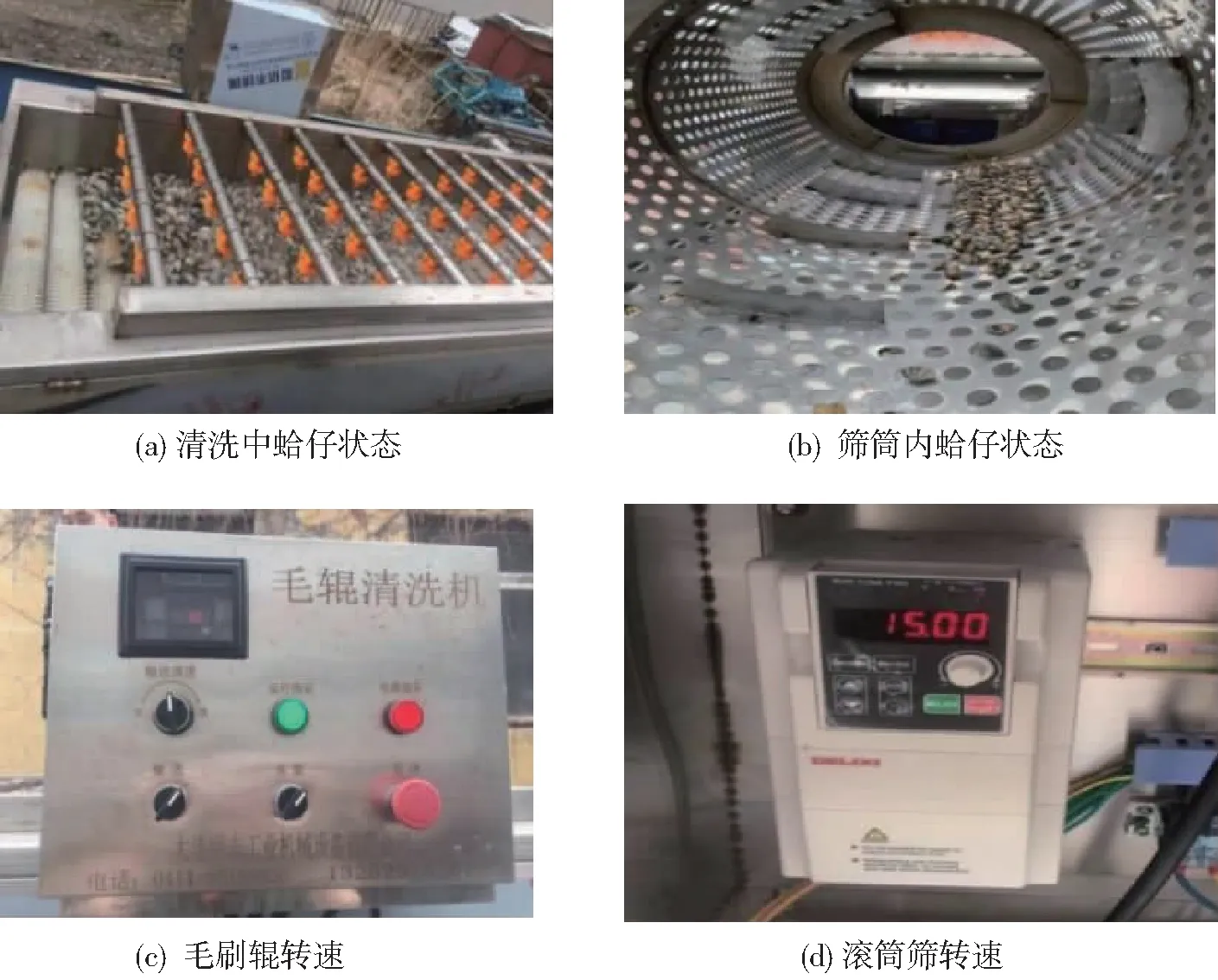
圖14 性能試驗(yàn)現(xiàn)場(chǎng)Fig.14 Performance test site
(3)洗凈率。通過(guò)查閱相關(guān)文獻(xiàn)引入感官評(píng)價(jià),目前海產(chǎn)品清洗裝備性能試驗(yàn)的國(guó)家,沒(méi)有定量評(píng)價(jià)蛤類是否清洗干凈的判斷標(biāo)準(zhǔn),故采用清洗后觀察蛤類表面沒(méi)有泥沙、黏液等雜質(zhì)即為清洗干凈[33],洗凈率如式(10):
(10)
式中:Q為蛤仔洗凈率;Qs為清洗干凈的蛤仔數(shù)量;Qy未被清洗干凈的蛤仔數(shù)量。
4.3 作業(yè)試驗(yàn)結(jié)果分析
菲律賓蛤仔清洗分級(jí)一體機(jī)性能試驗(yàn)結(jié)果如表5所示,蛤仔分級(jí)準(zhǔn)確率平均值91%,破損率平均值1.3%。

表5 作業(yè)試驗(yàn)結(jié)果Tab.5 Results of practical test
清洗前后效果對(duì)比如圖15所示。
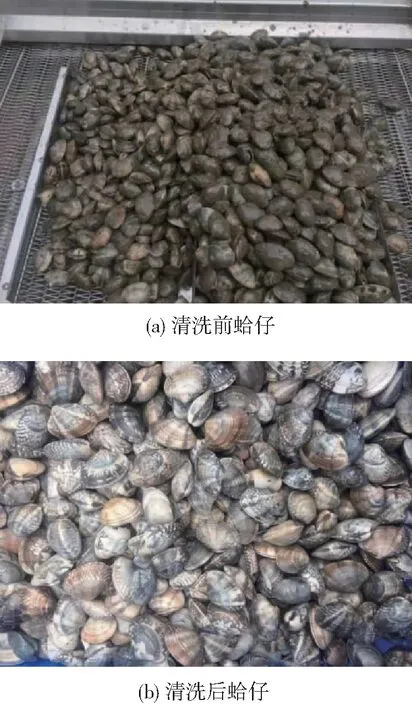
圖15 清洗前后效果對(duì)比Fig.15 Effect comparison after cleaning operation
由圖15可知,蛤仔泥沙均被沖洗干凈,表面附著物被清除,洗凈率100%。即滾筒篩轉(zhuǎn)速15 r/min、滾筒篩傾角3°、毛刷輥轉(zhuǎn)速3 r/min,分級(jí)精度、破損率、洗凈率均符合設(shè)備作業(yè)要求,在此參數(shù)下分級(jí)精度達(dá)到91%,蛤仔破損率在1%~2%之間,其殼體附著泥沙沖洗干凈。與已有研制的其他貝類清洗分級(jí)一體裝置相比[34],本機(jī)降低了蛤仔分級(jí)清洗過(guò)程的破損率,提高了分級(jí)準(zhǔn)確度,并且入料、清洗、分級(jí)功能集成,自動(dòng)化程度較高。但本機(jī)分級(jí)結(jié)束后缺乏集成稱重測(cè)量包裝要求,今后將進(jìn)一步優(yōu)化集成清洗、分級(jí)、稱重功能,提高其自動(dòng)化及智能化程度。
5 結(jié)論
面向菲律賓蛤仔清洗分級(jí)一體設(shè)備自動(dòng)化程度不高,清洗分級(jí)準(zhǔn)確率低,菲律賓蛤仔易破碎等問(wèn)題,本研究結(jié)合蛤仔形態(tài)特性,設(shè)計(jì)了一套清洗分級(jí)一體機(jī),并優(yōu)化了整機(jī)結(jié)構(gòu)及運(yùn)行參數(shù)。采用高壓噴淋與毛刷輥結(jié)合的清洗方式清洗蛤仔,蛤仔泥沙均被沖洗干凈,表面附著物被清除,洗凈率100%;滾筒篩分級(jí)結(jié)構(gòu)的優(yōu)化設(shè)計(jì),使設(shè)備分級(jí)精度達(dá)91%;清洗分級(jí)機(jī)作業(yè)測(cè)定發(fā)現(xiàn)蛤仔破損率僅為1%~2%。通過(guò)設(shè)備EDEM仿真及作業(yè)性能試驗(yàn)發(fā)現(xiàn),在滾筒篩轉(zhuǎn)速15 r/min、滾筒篩傾角3°、毛刷輥轉(zhuǎn)速3 r/min作業(yè)參數(shù)下,蛤仔的洗凈率、破損率、分級(jí)精度均符合設(shè)備設(shè)計(jì)要求,本機(jī)實(shí)現(xiàn)了對(duì)菲律賓蛤仔的高分級(jí)精度、低破損率的清洗分級(jí)。