全電子安全系統侵徹過載特性與通帶算法研究
2023-04-03 08:48:36杜廷蔚張祥金郭競杰
兵器裝備工程學報 2023年3期
關鍵詞:信號
杜廷蔚,張祥金,郭競杰
(南京理工大學 機械工程學院, 南京 210094)
1 引言
全電子安全系統(ESAD)的直列式、鈍感引爆等特性,使得ESAD具有較高的安全性、可靠性、可交互性。目前ESAD主要由前端制導系統給出的制導信號進行信號識別和處理,但應用于侵徹武器時,前端系統在高過載工況下失效率往往較高,因此在ESAD中加入信號采集與處理模塊作為冗余系統是必要的,對于ESAD在侵徹彈藥中的應用具有重大意義。
孫倩華等[1]針對過載信號粘連,提出了基于盒差分濾波的侵徹引信計層信號預處理方法。黃莎玲等[2]在融合信號計層算法基礎上提出一種自適應閾值層目標識別算法。房安琪等[3]提出基于數據增強的侵徹引信準確層識別神經網絡方法。王燕等[4]采用時頻分析法研究彈體主軸方向加速度信號的Choi-Williams能量分布特征,提出以侵徹過程加速度信號的能量分布為依據的層識別方法。以上文獻對單片機性能要求高,難以應用于實時工況中。李豪杰等[5]采用將彈體與引信分離建模獲得引信部位侵徹過靶的加速度信號,提出采用彈丸識別入靶過載信號后短時屏蔽計層功能的方法。
以上文獻都涉及對過載信號的濾波處理,但卻僅憑經驗設計了低通濾波的截止頻率,往往并不準確。本研究中利用對ESAD仿真得到的動態響應信號提出了一種通帶算法,并根據此截止頻率設計了低通濾波器,通過了半實物仿真驗證。
2 ESAD組成與侵徹仿真
ESAD主要模塊如圖1所示,信號采集與處理模塊實現彈丸侵徹靶板過程中ESAD的過載信號采集與處理,輸出的觸發信號輸入低壓控制模塊,低壓控制模塊主要接收前端制導單元和信號采集與處理模塊輸出的環境觸發信號與高壓生成模塊輸出的反饋信號,實現發火信號的控制和高壓生成模塊的電壓,起爆模塊用于接收發火信號,并起爆爆炸箔,引爆戰斗部,實現彈丸精準起爆控制。
圖1 ESAD模塊框圖
ESAD中信號處理單元框圖如圖2所示,MEMS傳感器采集彈丸侵徹靶板過程中ESAD的動態響應信號,通過信號放大器與高通濾波器,再由AD轉換器將響應信號輸入控制處理單元中,實現對彈丸穿靶的檢測,達到精確計層的目的。
圖2 信號采集與處理模塊框圖
如圖3所示,根據實際侵徹彈丸、ESAD和混凝土靶板結構,建立1/4數值仿真模型,因為彈體內部包含了各種材料和機械結構,使得對ESAD這一特定部分進行動態響應分析非常困難,因此本文將除ESAD外的整個彈體做均勻介質整體考慮。同時彈丸中⑤部分為ESAD,根據應力波衰減理論[6-7],當峰值很高的應力波從波阻抗很低的材料向波阻抗很高的材料傳遞時,幅值會大幅降低,因此,為降低ESAD內部應力,提高抗沖擊能力,并固定內部芯片及引腳,在ESAD內部用波阻抗低的環氧樹脂⑥進行灌封[8-9]。此外,本研究中忽略了MEMS加速度傳感器自身的擾動。
圖3 侵徹彈丸、ESAD和混凝土靶板仿真模型
本仿真對ESAD、彈體與混凝土中彈靶作用區域進行了網格加密處理如圖4所示,采取Lagrange顯式動力學算法,彈體與ESAD外殼采用鎢合金Johnson-cook本構模型和Mie-Gruneisen狀態方程[10-11],混凝土采用Rht本構模型與p-α狀態方程[12-13],關鍵參數如表1所示[14-15]。
圖4 網格劃分示意圖
彈丸質量為40 kg,口徑為100 mm,長度為300 mm,初始速度設置為680 m/s,初始時刻彈頭距離靶板50 mm,混凝土靶厚設置為100 mm,靶板間隔設置為500 mm,過載值測試點選取為ESAD內部如圖5所示。圖6為用Matlab輸出的環氧樹脂灌封后的ESAD過載加速度信號,從其中可以看到ESAD過載信號極其不穩定,主要是因為彈丸在穿靶過程中,真實的過載信號與彈體中的高頻振動信號產生了混疊,使得過載響應在時域上存在層與層之間的粘連現象,需要的過層信號被雜波信號淹沒,ESAD難以判斷真實的過層信號。ESAD穿靶的速度變化如圖7所示。
圖5 加速度測試點

圖6 灌封后ESAD過載加速度波形
ESAD位移如圖8所示,ESAD在整個侵徹過程中沒有發生與彈體的相對位移,可以通過ESAD的位移距離來判斷彈丸撞擊靶板的時間窗如表2所示。
圖8 ESAD位移變化曲線

表2 彈丸穿靶時間窗
ESAD中真實的過載響應信號頻率非常低,理想情況下的頻率為
(1)
式中:v為ESAD穿靶的平均速度;l1與l2分別為彈丸長度與靶板厚度。根據ESAD速度響應曲線可以計算出ESAD過載信號的理想頻率f0是1.7 kHz。
3 低通濾波器通帶算法研究
低通濾波器截止頻率選擇對過載信號有決定性的作用,信號中通帶外的頻率會受到極大地衰減,若ESAD真實過載信號處于通帶外,那么后端信號處理單元就無法正常工作,會導致彈藥的誤炸甚至不炸。因此通帶的選取尤為重要。
濾波后的信號可能存在2種情況,一是截止頻率選擇過小,原本真實的過載信號被濾除,余下信號為低頻雜波信號;二是截止頻率選擇得過大,余下信號還存在多余高頻雜波[16]。本文針對這2種情況提出了一種通帶選擇算法,算法流程如圖9所示,其中初始截止頻率采用理想截止頻率f0計算,經過每層靶板的計算速度變化值vc與實際速度變化值vi的比較需要執行4次,以降低誤差。
圖9 通帶算法流程
考慮到加速度值a的解析解比較復雜且精度不高,本文采用復化梯形數值積分的方法來計算近似積分值,其算法為
(2)
式中:vc為計算的速度變化值;t1與t2分別為彈丸入靶和出靶的瞬時時間;h=(t2-t1)/n為數值積分計算的步長;a(t1)為ESAD在t1時刻的加速度;a(t2)為ESAD在t2時刻的加速度;n為對數值積分做等分點的個數。
實際上,加速度a在下限為t1與上限為t2的定積分值為:
(3)
式中:ti=t1+ih;i=0,1,…,n;n→+∞。
根據Lagrange插值多項式的截斷誤差,可以得到,在[ti,ti+1]區間內,有:
(4)
式中:a″(ξi)表示加速度在點ξi的二階導數,其中ξi∈[ti,ti+1]。
將式(4)代入式(3)并與式(2)求差值,可以得到復化梯形數值積分的截斷誤差:
(5)
根據式(5)可以看出,截斷誤差En(a)以1/n2的速度衰減,當n→+∞時,En(a)=0。在算法中,控制截斷誤差及數值積分得到的速度誤差控制在0.000 1,將算法通過Matlab實現,濾波后可以得到ESAD經過每層靶板的速度變化值。
因為彈體內應力波傳播時間問題會導致ESAD接收到過載信號會比彈丸撞擊靶板的時間晚,因此此次計算將彈丸撞擊靶板的時間窗往后移動30 μs。根據前文所述彈丸穿靶時間窗,列出彈丸實際速度變化值,因為本文只研究ESAD在正侵徹方向上的加速度值,因此也只關注ESAD在正侵徹方向上的速度值,如表3所示。
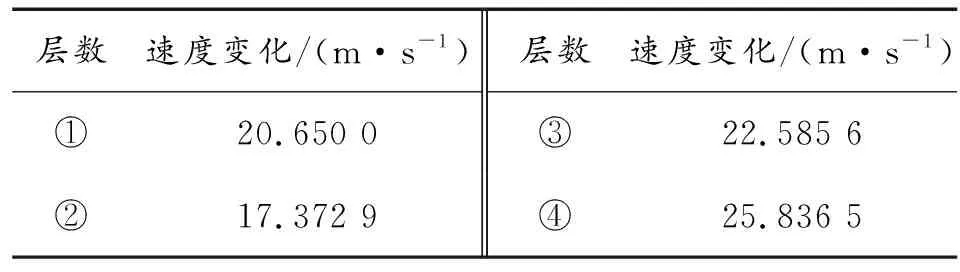
表3 實際ESAD速度變化值Table 3 Actual ESAD speed variation value
將濾波后計算得到的速度值精度控制在5%以內。
(6)
根據算法可以計算得到截止頻率f0=1 965 Hz,速度誤差如表4所示。
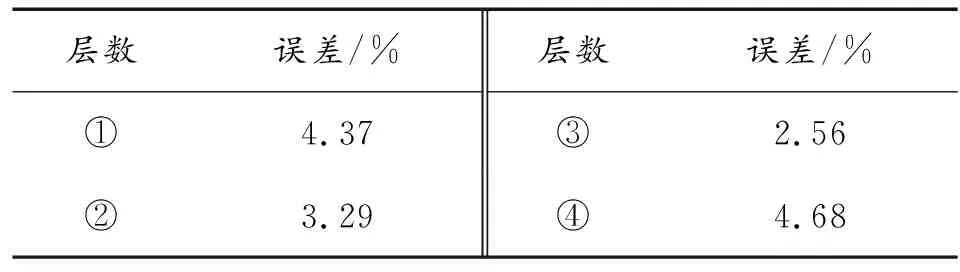
表4 速度誤差Table 4 Velocity error
由表4可以看到,計算得到截止頻率對應的速度誤差較小。濾波曲線如圖10所示,可以看到濾波后曲線可以明顯的分辨出過載信號和粘連信號,但信號中仍然存在一部分噪音,只需要在后續軟件中采用閾值加時間窗的方法來實現計層,證明了此算法計算出的截止頻率的有效性。
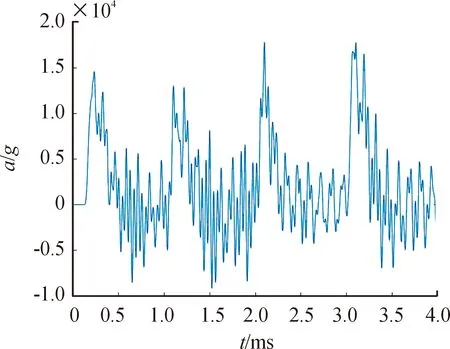
圖10 侵徹4層靶板ESAD過載濾波曲線
4 半實物仿真用濾波器原理及設計
有源濾波器相較于無源濾波器無電感滿足ESAD的小體積約束,且對ESAD內部如高壓電容、MCT等對電磁兼容性要求高的元器件產生的干擾小。本文根據ESAD動態響應特征基于Sallen-key典型電路設計了一個低通模擬有源濾波器。
4.1 Sallen-key典型電路
Sallen-key(SK)是有源濾波器設計的一種拓撲結構,VCVS(Voltage-controlled voltage-source)濾波器的變種,由麻省理工學院林肯實驗室的R.P.Sallen和E.L.Key在1955年提出[17],此拓撲具備輸入阻抗高、電路結構簡單、Q值和通帶增益受元件參數的影響小、品質因素調節方便且可調范圍大、易于實現增益的精確設計等特點,在軍事裝備領域得到了廣泛的應用[18]。其基本結構如圖11所示,Z1、Z2、Z3、Z4以阻抗形式表示。
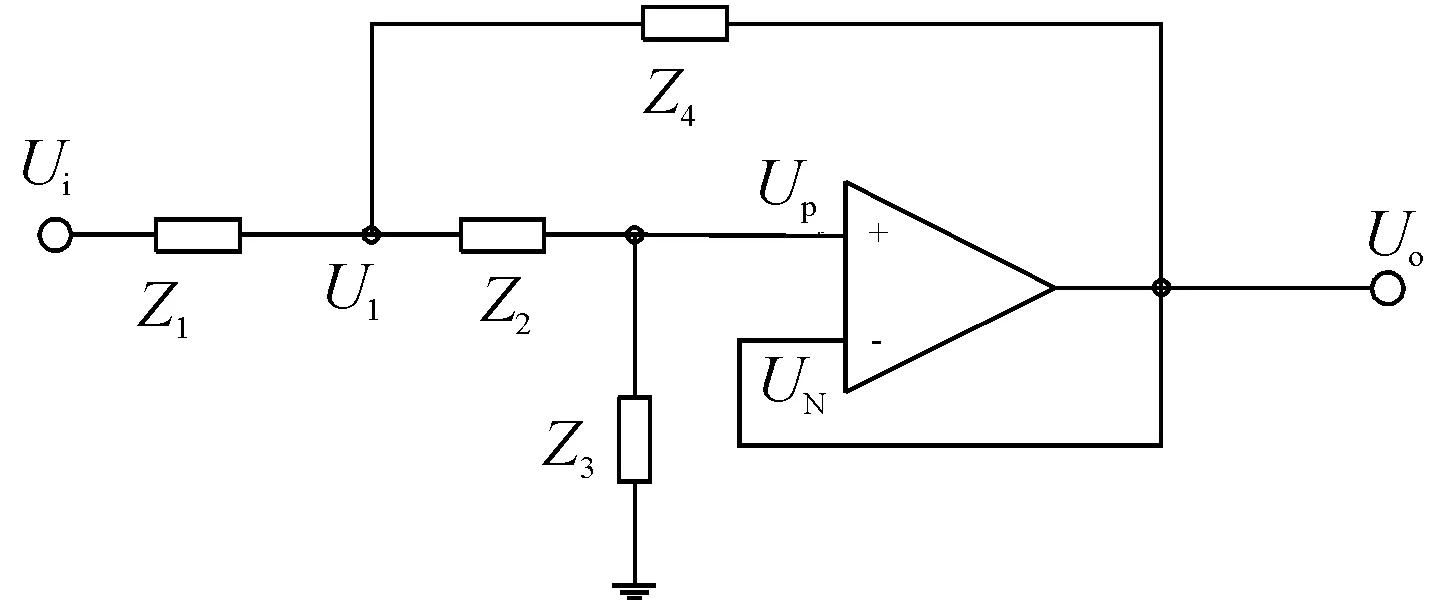
圖11 Sallen-key拓撲結構
根據理想運放虛短、虛斷概念可以得到:
(7)
式中:UO為輸出電壓;UP和UN分別是運放的正負輸入端。在U1點運用KCL與虛斷原理可以得到:
(8)
將式(7)與式(8)聯立可以得到傳遞函數:
(9)
4.2 基于Sallen-key的低通濾波器設計
根據SK拓撲結構,將Z1、Z2選作電阻對應R1、R2,Z3、Z4選作電容元件C1、C2,如圖12所示。將電容與電阻阻抗表達式代入式(9)中,可以得到SK低通濾波器的傳遞函數,如式(10)所示。
(10)
低通濾波器二階響應標準形式:
(11)
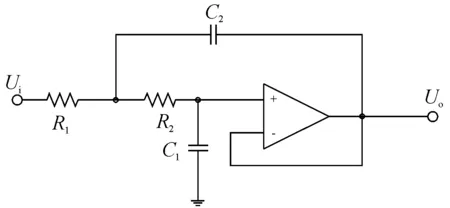
圖12 SK低通濾波器
對比式(10)和式(11)可以得到此低通濾波器的截止角頻率如式(12)所示和品質因素如式(13)所示。
(12)
(13)
濾波器的品質因素Q>0.707時,濾波器頻響會在截止頻率處出現峰值化,而Q<0.707時,響應曲線過渡會趨向平緩,選擇Q值為0.4。截止頻率f0在通過前文算法得到為1 965 Hz,因此截止角頻率w0=2πf=12 346 rad/s。將Q值代入式(13)可以得到

(14)
結合實際,選擇C1=2.2 nF,C2=4.4 nF,R1=R2=26 kΩ,通過計算可以得到截止頻率f0=1 967 Hz,Q=0.4,其Bode圖如圖13所示。
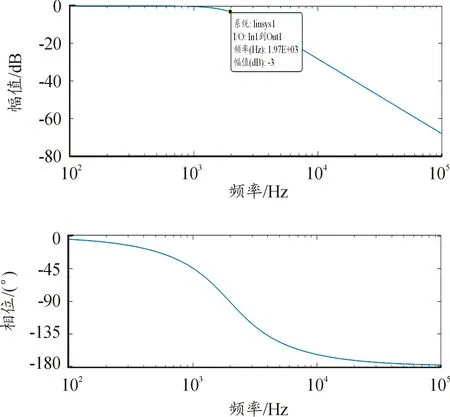
圖13 SK濾波器Bode圖
從圖13可以看到,此濾波器對于低頻段的信號衰減幅度較小,-3 dB處的頻率為1 970 Hz接近1 967 Hz,過載波形濾波仿真后結果如圖14所示,滿足第2節中提到的特定截止頻率的濾波器要求。
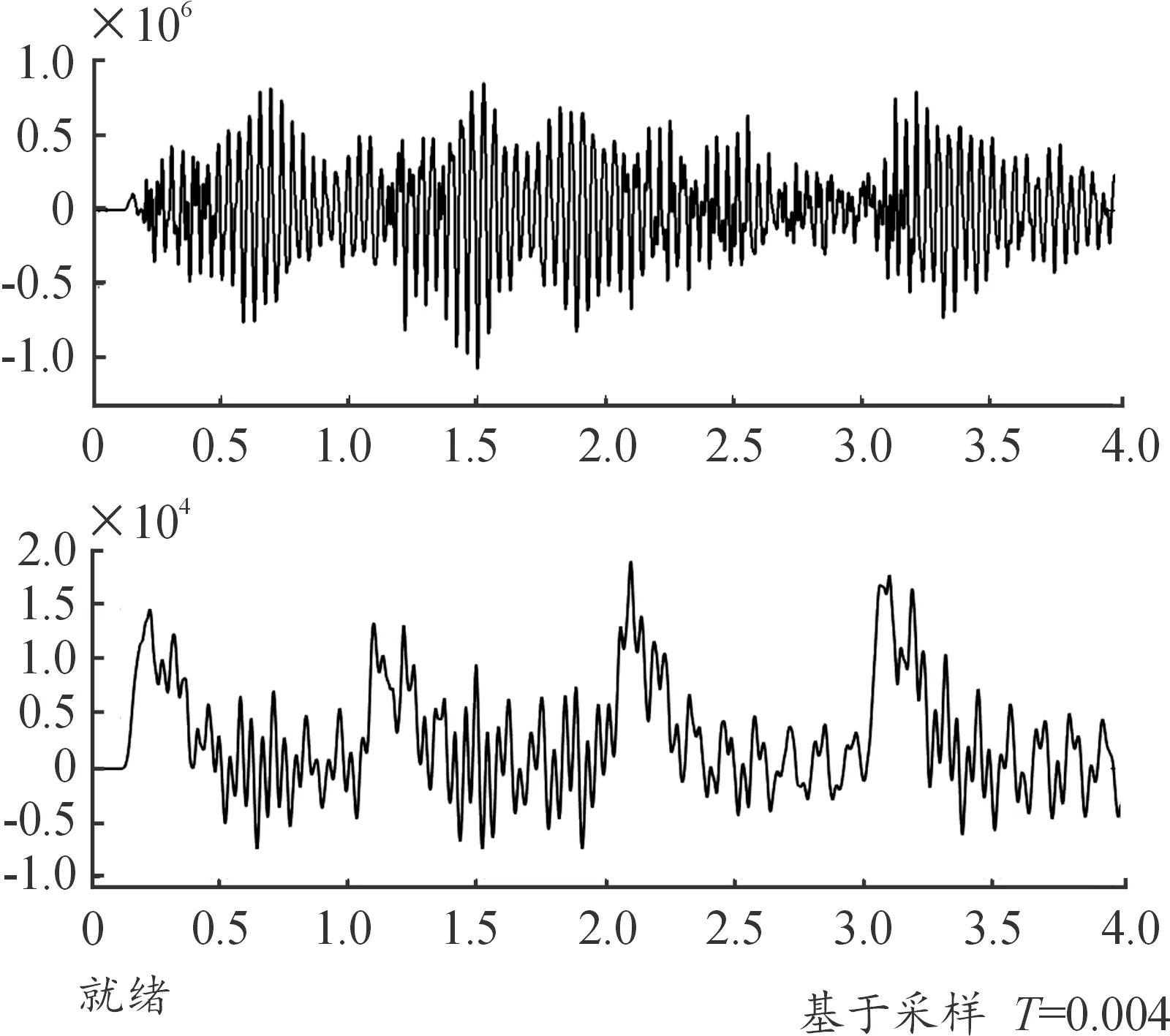
圖14 SK濾波器仿真圖
濾波器截止頻率與設計的截止頻率有誤差,將濾波器輸出的響應信號代入式(2),可以得到對應的穿靶速度誤差如表5所示。
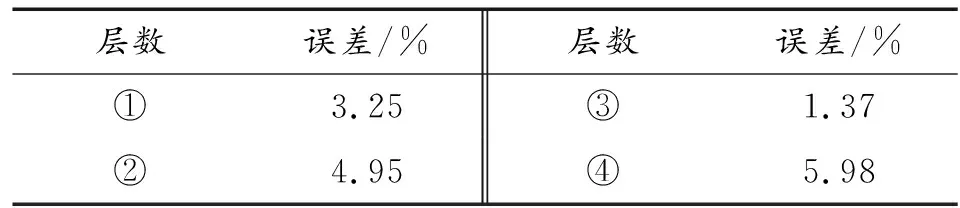
表5 濾波器響應信號誤差Table 5 Filter response signal error
從表5中可以看到,過靶速度變化誤差控制在了較小的范圍,滿足工程設計要求。
5 半實物仿真實驗驗證
由于實驗條件所限,采用ESAD半實物仿真系統對信號采集模塊進行驗證。ESAD半實物仿真系統由電源、波形發生器、ESAD、示波器組成。波形發生器用于將以往試驗中采集到的加速度數據轉化為模擬電壓信號,輸入ESAD中的信號采集模塊中以代替加速度傳感器輸出信號,信號采集模塊中低通濾波器的響應波形直接輸出至示波器中。圖15所示為彈丸侵徹3層靶板的試驗數據。
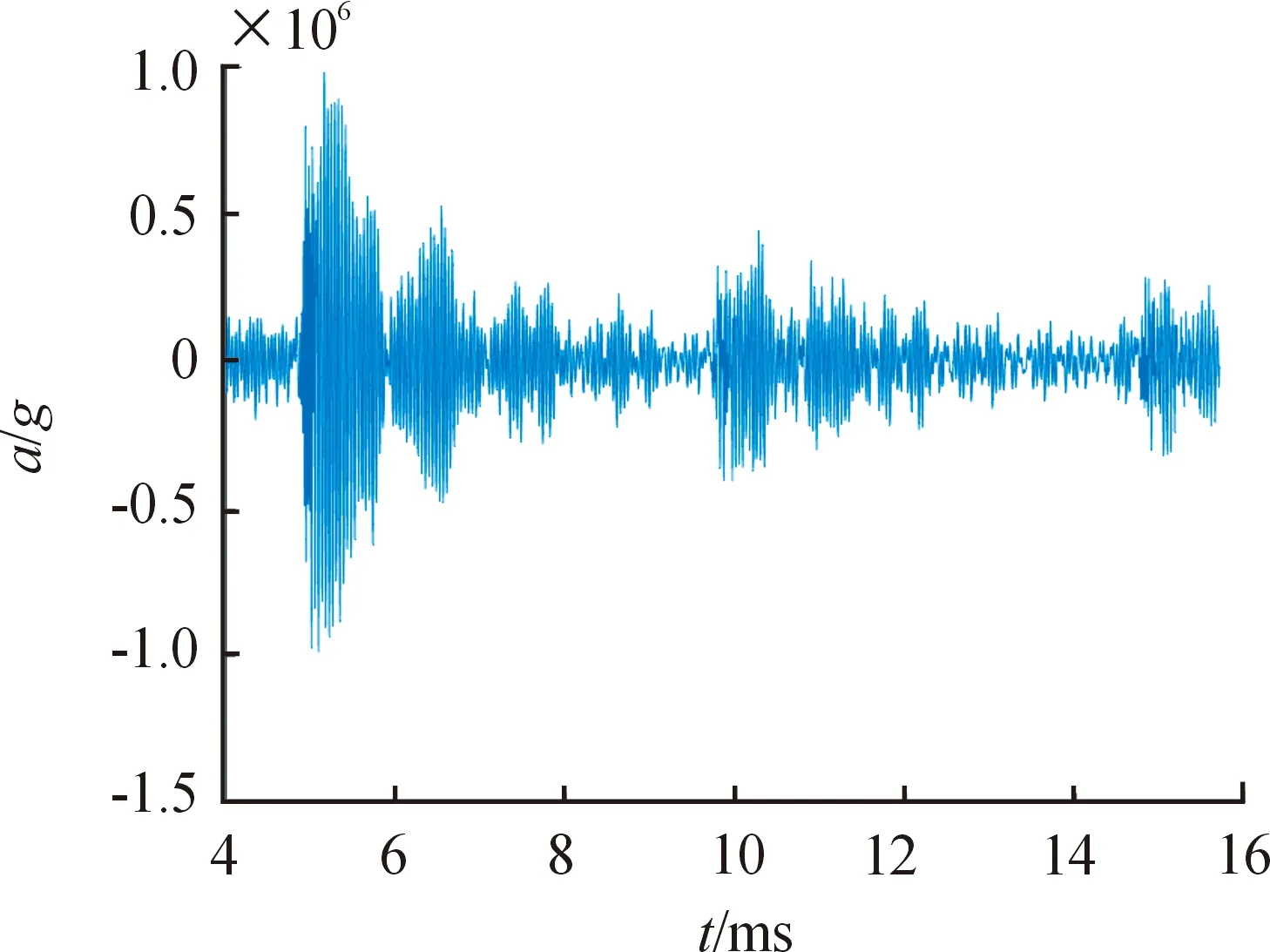
圖15 侵徹3層靶板ESAD過載值
在第1節仿真中為了節省仿真時間,在仿真計算中縮短了靶板之間的距離,但仿真計算時所用模型與試驗所用彈丸與靶板模型一樣。直接運用3節設計的濾波器對試驗數據進行濾波,結果如圖16所示。圖中可以看到,低通濾波器對試驗過載信號的響應曲線分層信號清晰,結合閾值加時間窗算法可正確計層。
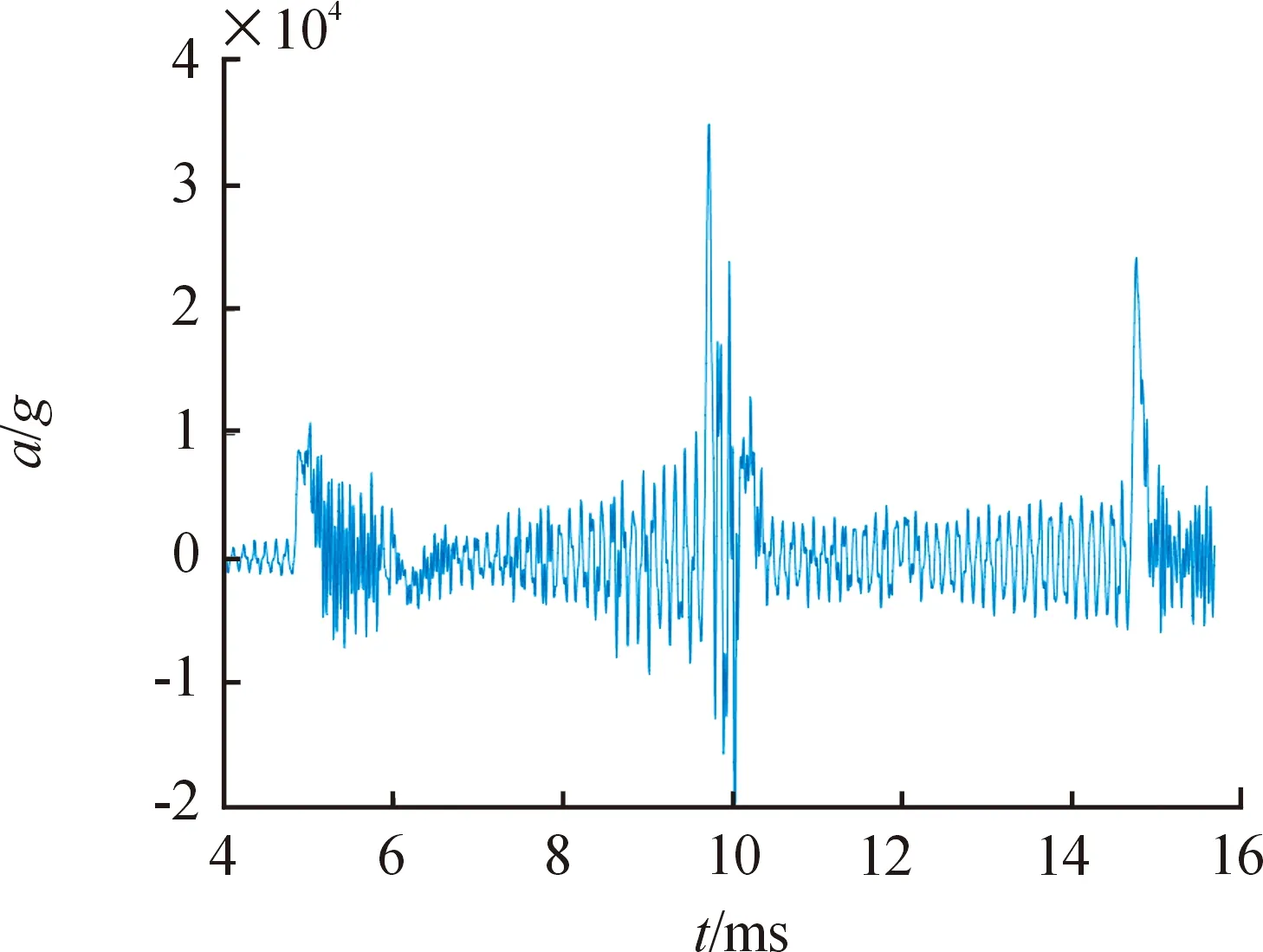
圖16 濾波后的過載信號
6 結論
1) 在彈丸侵徹目標時,ESAD過載響應曲線復雜多變,需采用具有精確通頻帶的低通濾波器。
2) 本文提出的通帶算法直接通過前期仿真計算獲得,不需要單片機實時計算復雜算法,提高了模塊的實時性。
3) 通過本文算法得到的截止頻率通過半仿真實驗驗證,結果表明其具有較好的分層特性,結合后端閾值加時間窗算法可以有效識別彈丸穿靶。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06