仿生六足機器人步態設計與運動仿真
2023-03-29 14:22:42馬秀峰張奇峰孫英哲
計算機仿真 2023年2期
馬秀峰,張奇峰,孫英哲,5
(1. 中國科學院沈陽自動化研究所機器人學國家重點實驗室,遼寧 沈陽 110016;2. 中國科學院機器人與智能制造創新研究院,遼寧 沈陽 110169;3. 遼寧省水下機器人重點實驗室,遼寧 沈陽 110169;4. 東北大學信息科學與工程學院,遼寧 沈陽 110819;5. 中國科學院大學,北京 100049)
1 引言
仿生機器人是指依據仿生學原理,模仿生物結構、運動特性[1],多足仿生機器人主要有雙足類人機器人、四足類騾馬機器人和六足類蜘蛛、海蟹機器人[2]。六足機器人有著較強的穩定性和地形適應能力,能夠在社會服務,軍事應用,海洋科考等[3-5]多種場景下替代人類執行任務,具有重要研究意義與使用價值。國內外相關學者對此進行了相關研究,Kamikawa等人提出了一種使用位置和機體傾斜信息的六足步行機器人步態控制方法[6];Okamoto等人提出了一種六足機器人穩定行走的策略,將機器人的重心控制在與地面接觸的三條腿形成的三角形內[7];Shahriari等人使用強化學習方法生成六足步行機器人基本步態[8];金波等人采用仿哺乳類的腿部結構,設計了由步進電機驅動的六足機器人并實現了直行功能[9];劉連蕊等人針對六足機器人,設計了一種橫向運動行走步態[10]。
六足機器人是冗余并聯系統,足腿均為開鏈式結構,要控制機器人達到預期運動效果,其根本就是控制每條腿的各個關節按照給定期望運動。利用D-H(Denavit-Hartenberg)方法描述機器人的坐標系統并結合機器人結構參數構建運動學模型[11],而機器人正逆運動學的建立與求解是運動控制的前提條件。在能夠運動的基礎之上機器人的運動步態、控制方法和關節驅動能力決定了其運動的方向、速度、穩定性、越障能力等性能,利用MATLAB的Simulink工具箱搭建六足機器人虛擬樣機仿真平臺,采用基于模型開發的方式對所設計步態、控制方法和腿部關節力矩進行仿真驗證與分析,具有實際的參考應用價值,進一步提高了六足機器人的運動穩定性和行走能力,并可縮短控制方法的設計時長,為六足機器人實物樣機設計與運動控制打下基礎。
2 機器人結構模型
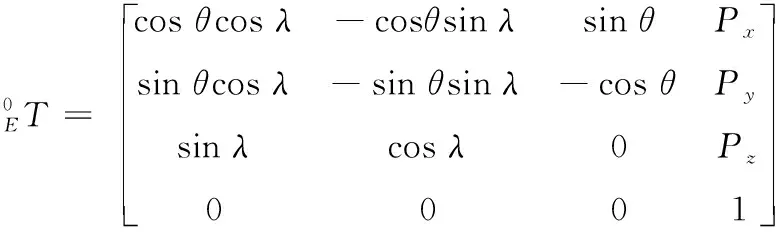
六足機器人的結構模型如圖1所示,在機器人的機體左右兩側六條三關節機械腿對稱分布,腿上三個關節分別為水平轉動的基關節,垂直轉動的髖關節和膝關節,機器人的主要參數值見表1,在此結構下機器人具有較好的運動特性。
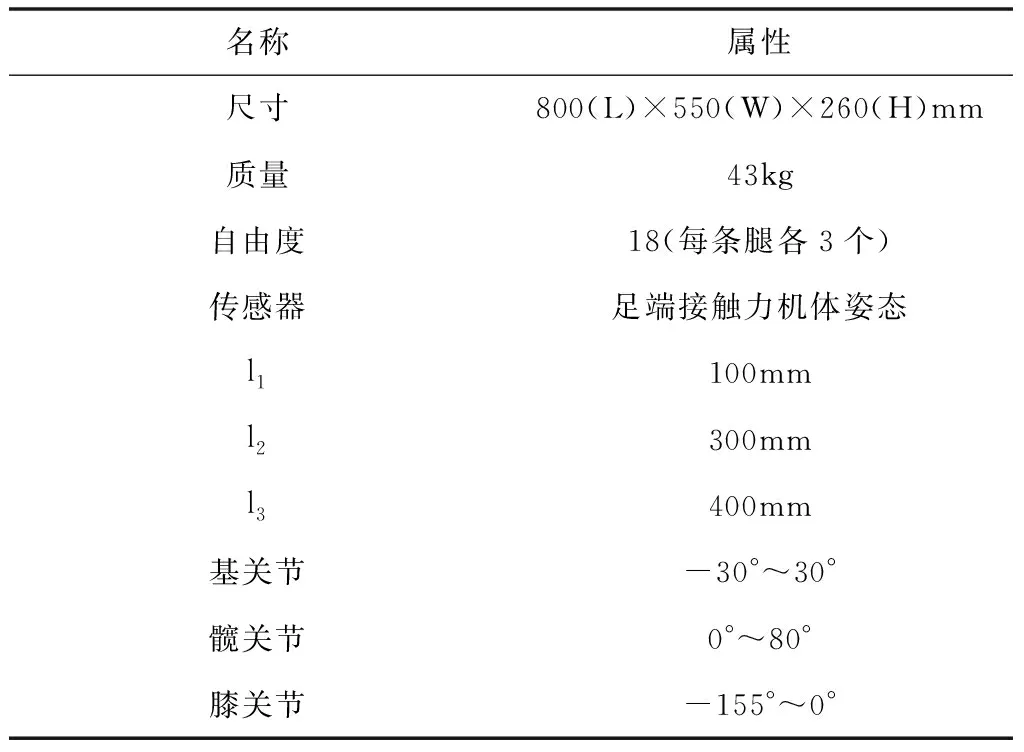
表1 六足機器人主要參數
3 機器人運動學建模
3.1 正運動學求解
腿部的正運動學是由已知的各驅動關節角度計算得到腿末端在基關節固定坐標系{O}下的位置,其本質則為連桿坐標系統的平移和旋轉變換過程,而腿上連桿i(i=1,2,3)遠端坐標系{i}在連桿i-1遠端坐標系{i-1}下的表達為
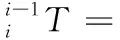
(1)
根據D-H參數理論方法和腿部的具體結構參數,機械腿的連桿坐標系示意如圖2所示,并且得到單腿的D-H各項參數如表2所示。
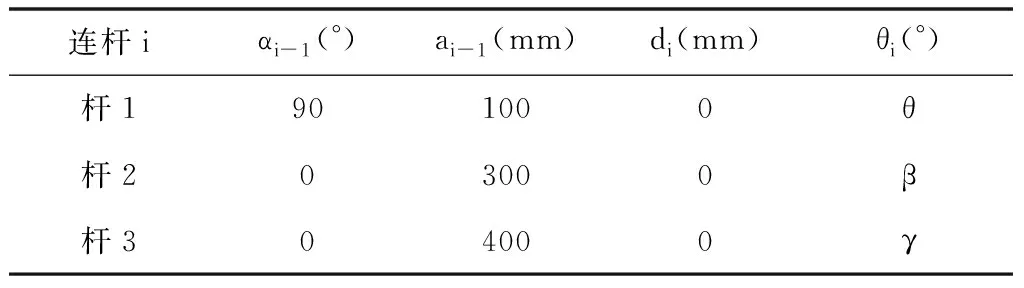
表2 單腿D-H參數表

(2)
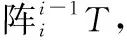
得到腿末端坐標系{E}在基關節坐標系{O}下的旋轉變換矩陣表達式
(3)
上式中第四列P向量為腿的末端在基關節坐標系下的偏移量,故單腿正運動學表達式為:

(4)
其中λ=β+γ
3.2 逆運動學求解
逆運動學是對六足機器人做腿部運動控制的基礎,是根據已知的腿部末端接觸點相對固定坐標系的位置,求解機器人腿部各個關節角度的過程,由于六足機器人的足腿各關節的轉動范圍已作限定,見表1,則在幾何關系上有任意一個空間位置P均對應唯一的一組關節角度值,由此利用幾何方法完成逆運動學求解,幾何圖示如圖3所示。
圖3 幾何關系圖示
推導得出關系式(5),可確定足腿的末端接觸點對基關節、髖關節、膝關節的運動學逆解,已知腿末端位置Px,Py,Pz和各個連桿的長度,即可求解出足腿的各個關節轉動角度q。
至此,分析建立了運動學正解和運動學逆解的數學表達式。
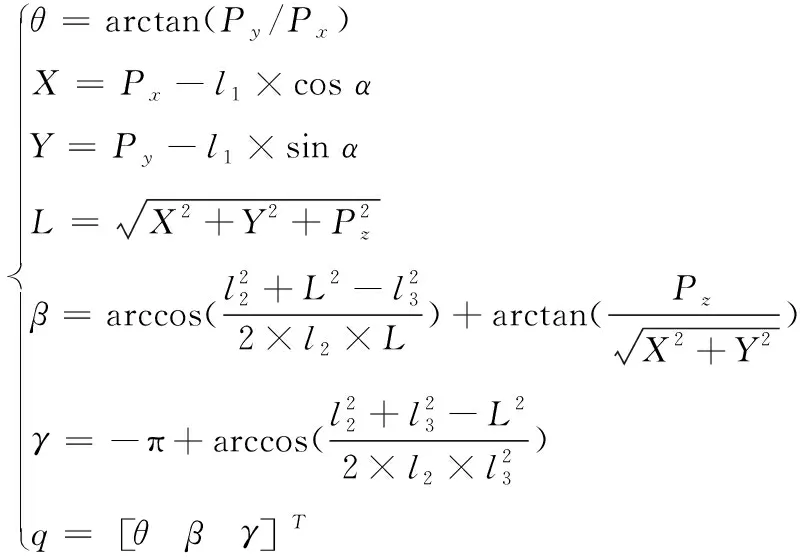
(5)
4 運動步態設計
此節為六足機器人設計運動步態,基于上一節建立的運動學模型,通過設計控制器與虛擬機器人被控對象相結合,產生連續步態,結合擺動腿著地控制和機體姿態控制,實現機器人穩定行走。機器人的步態包括靜態步態和動態步態[12],靜態步態每次邁一條腿穩定性高,但運動速度慢,執行效率低;而動態步態是對角運動方式,運動速度較快,穩定性會降低;對于六足機器人而言在對角三角步態下三條對角腿為一組按照給定的啟停信號走過特定軌跡,有著靜態和動態步態的優點。步態設計中將六條腿劃分為兩組,見表3。
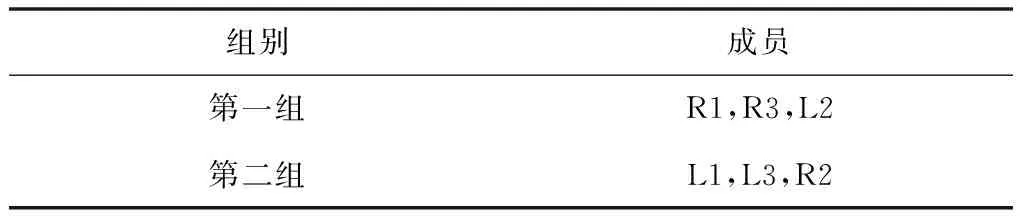
表3 腿的組別劃分
六足機器人以特定步態運動過程是由最基本的腿部擺動和支撐階段所構成,如圖4所示,其決定了運動的步幅長度m和每步高度h,同時擺動階段經歷時間tb和支撐階段經歷時間tz相等,既0.5的占空比,以保證運動的同步性。
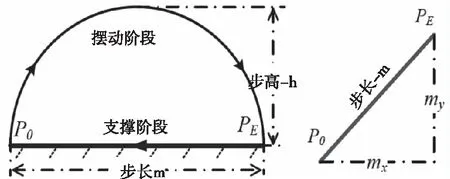
圖4 擺動支撐階段示意
針對此擺動支撐過程提出一種函數方法用于參考軌跡生成,可達到擺動階段經過平穩抬起-加速上升-減速下降-平穩落腳,支撐階段經過加速-平穩-減速過程,利用三角函數特性,在笛卡爾空間坐標系中將擺動和支撐階段分解到單個軸線上并建立以對應軸線為縱軸,以時間為橫軸的坐標系,單獨處理后合并得到足端在笛卡爾空間坐標系中的軌跡。分析推導出擺動階段軌跡點生成方式,見式(6),式中P0、PE為3×1的足端位置向量,令式中Px和Py取反、Pz=PEz,經變換可得到腿部在支撐階段軌跡點生成方式。
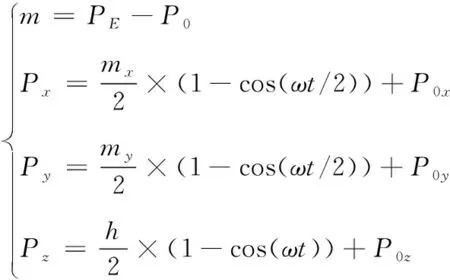
(6)
得到和時間t相關的軌跡點向量P

(7)
由式(7)并結合運動學分析中的式(4)、式(5)、機器人結構、步長m、步高h和擺動周期參數,編寫軌跡生成模塊,得到擺動支撐階段的運動軌跡和關節角度變化情況,如圖5所示,其中tb=tz=2s,當足端在沿著此種方法生成的軌跡點運動時各關節角度、速度以及末端速度變化連續且無驟然突變情況,有效降低了運動過程中的沖擊和對機體的影響,以此動態生成六足機器人運動中每步的軌跡參考。

圖5 擺動-支撐運動軌跡各指標變化
上述方法可以產生理想的足端運動參考軌跡,但在實際環境中地面并非是理想的平坦狀態。在每一步中,就預先定義的步態中腿部擺動過程而言,將會出現擺動腿末端早著地或晚著地的情況,如圖6所示。對于這兩種情況,有必要修改擺腳的落地位置,以保證平穩落地。在六足機器人的足端安裝力傳感器,其反饋信號是足端著地狀態的體現,垂直位置誤差在擺動階段得到補償。為此所提出的擺動腿足端著陸位置調整控制策略流程如圖7所示,圖中擺動腿足端軌跡是相對地面坐標系而言的。

圖6 擺動腿下落階段過早和過晚著地情況
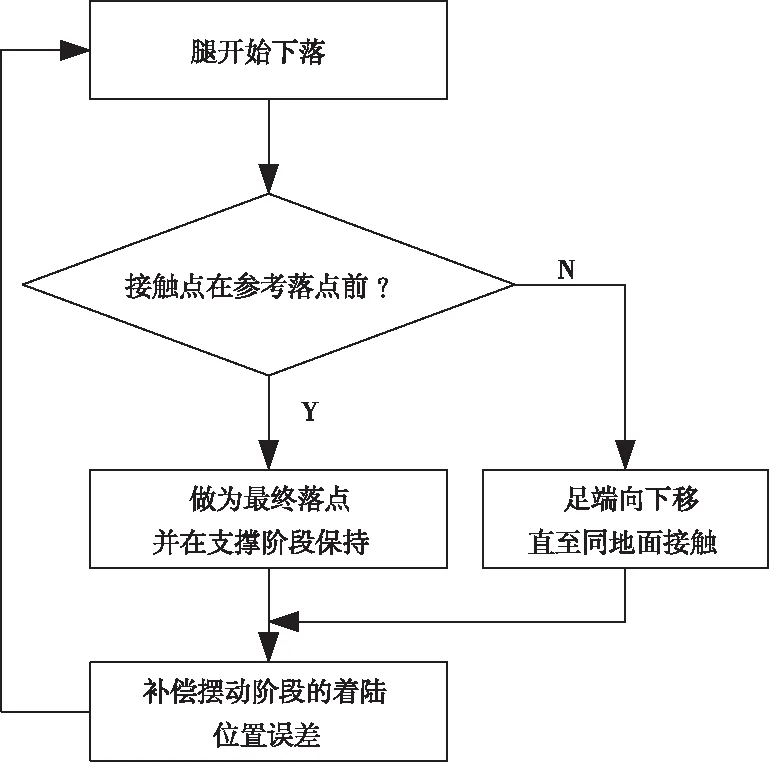
圖7 擺動腿足端落點位置調整控制策略
4.1 轉彎步態
轉彎步態是多足機器人運動中的常見步態,在機器人運動過程中遇到障礙物等情況下,通常需要切換到轉彎步態通過調整落腳點位置實現六足機器人運動方向的改變,在一個調整周期T內轉彎這一動態過程分為:第一階段(0~T/2)第一組腿為擺動相,以機體中心作為參考逆(順)時針擺動,第二組腿為支撐相保持機體穩定;第二階段(T/2~T)第一組腿為支撐相,順(逆)時針運動,第二組腿為擺動相;以組為單位繞機體中心擺動,兩階段連續執行實現六足機器人的原地轉彎步態,如圖8所示為六足機器人轉彎步態。

圖8 轉彎步態
4.2 直行步態
直行步態不同于轉彎步態中每組腿同時順時針或逆時針運動,而是同時處于擺動或支撐模式,在直行過程中分布在機體兩側的六條腿各自的擺動步幅長度相等,直行中第一組擺動,第二組支撐在T/2時刻停止,T/2時刻第二組擺動,第一組支撐至T時刻結束,依次循環往復,針對直行步態構成又具體劃分為起始步、中間級全步、停止步,直行步態的構成時序圖如圖9所示;其中,啟動步是為后續行走做準備,停止步使六足機器人在靜止時各個腿均勻受力,以此保證機器人站立時最好的穩定性,并為后續其它運行步態提供初始運動條件。
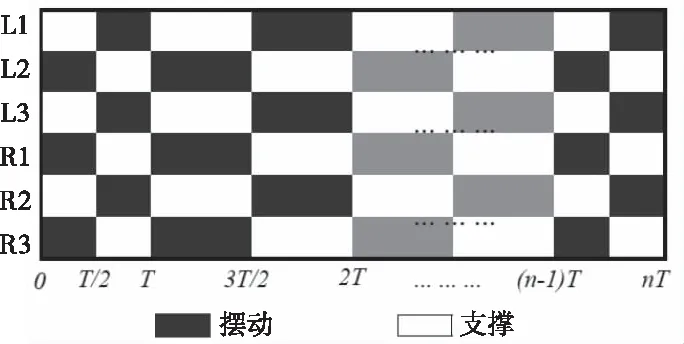
圖9 直行步態時序
4.3 弧線行走步態
此步態相較于轉彎和直行步態在運動控制上更為復雜,弧線行走步態和直行步態的差異在于擺動步幅長度的不同,機器人的弧線行走是通過動態調整步長的方式,使六足機器人兩側出現速度差,實現弧線行走,此時既要按照分組做組內同步運動,又要對同側腿做步長上的調整;如機器人前行中,當R一側腿的單步步幅小于L一側,連續執行此過程時,完成直行中向右側轉彎,步態設計如圖10所示。
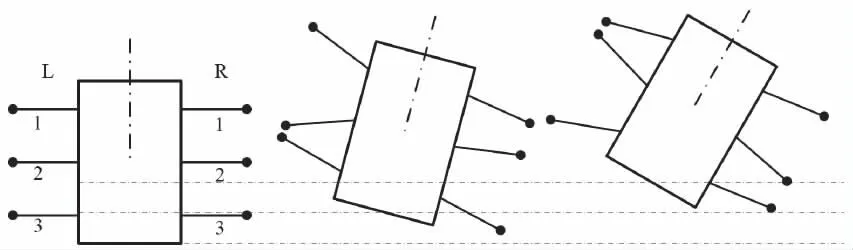
圖10 弧線行走步態
4.4 機體姿態控制
六足機器人機體保持水平,特別是在傾斜地形上,以提高行走的穩定性,利用多軸姿態傳感器獲取機體的姿態信息。歐拉變換的順序為Z-Y-X設置濾波器的截止頻率為0.1Hz。為將機體的俯仰和滾動角控制在0值附近,針對二者設計了比-例積分控制器,式(8),而得到兩個控制角度α和φ,經由歐拉變換和腿部的坐標變換得到新的調整后的足端位置量,如下
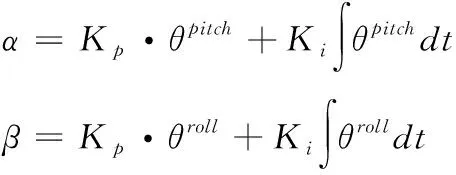
(8)
A=Rotzγ·Rotyφ·Rotxα
(9)

(10)
其中,d′是上一時刻的足端在機體坐標系下的向量表示,d是當前時刻計算出新的足端向量值,下圖為機器人初始傾斜姿態下調整到0的過程。

圖11 機體傾斜狀態恢復水平
5 運動仿真
利用MATLAB的Simulink物理仿真環境創建機器人仿真平臺,對機器人的運動進行仿真,驗證所設計的步態并對機器人的運動性能和關節力矩情況進行分析,為使六足機器人連續運動,根據前文運動學公式及運動步態編寫了行走模式控制和連續運動路徑生成模塊,系統組成如圖12所示。
仿真系統中設置運動參數:步高h=80mm,步長200mm,160mm,100mm,單步時長2s,關節最大輸出力矩70N·m,在8s時開始行走運動,運行至22s結束。
直行過程中對比實驗了不同步長下的運動效果并得到如圖13所示的機器人運動軌跡和L1號腿各關節輸出力矩結果,由圖13(a)可知,隨著機械腿擺動步長減小,機器人運動速度隨之降低,在擺動步長為200mm時,得到機器人行走階段最大平均速度約0.1m/s;通過分析圖13(b)腿L1的基關節輸出力矩,隨著機器人行進速度的提升,基關節輸出力矩隨之變大,既運動速度與基關節力矩呈正相關;由圖13(c)(d)知,當足腿處于支撐階段時髖關節輸出力矩最大,達到了52N·m,是支撐機器人的最主要動力來源,是機器人腿部的主要受力關節。綜合以上分析可得出基關節的驅動能力決定了機器人的行進速度,同時在設計機器人時應著重注意髖關節的驅動能力,以保證運動中機器人機體的穩定,如若此關節驅動能力不足將會導致機器人在運動過程中機體上下起伏和左右擺動,降低實際行走穩定性。
機器人使用弧線步態運動過程中,設定基礎步長200mm,對比實驗了機器人兩側腿在不同步長比例下機器人轉彎情況,如圖14所示為機器人機體中心投影在X-Y平面上運動路徑,其中兩組數據分別表示左側和右側腿的擺動步長之比為3:2和2:1的情況,在相同的運動時間內,隨著機器人兩側腿的步長比例系數增大,轉彎半徑變小,同時機器人并未出現失穩狀況。通過以上仿真,說明所設計步態和控制策略在直行和轉彎情景下具有合理性。
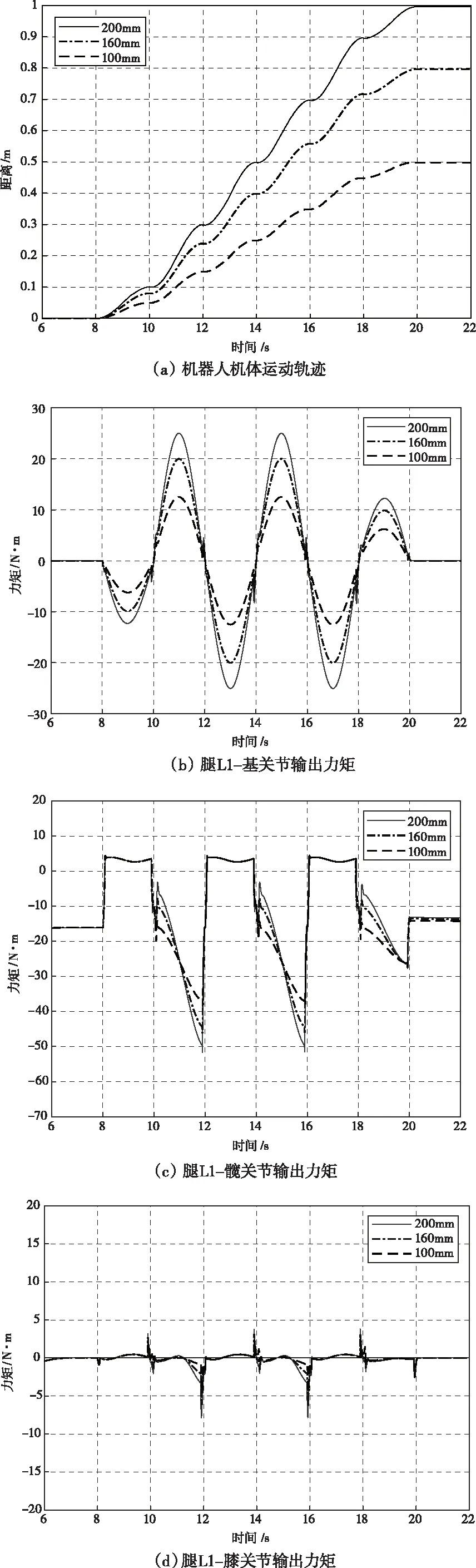
圖13 直行運動過程仿真結果
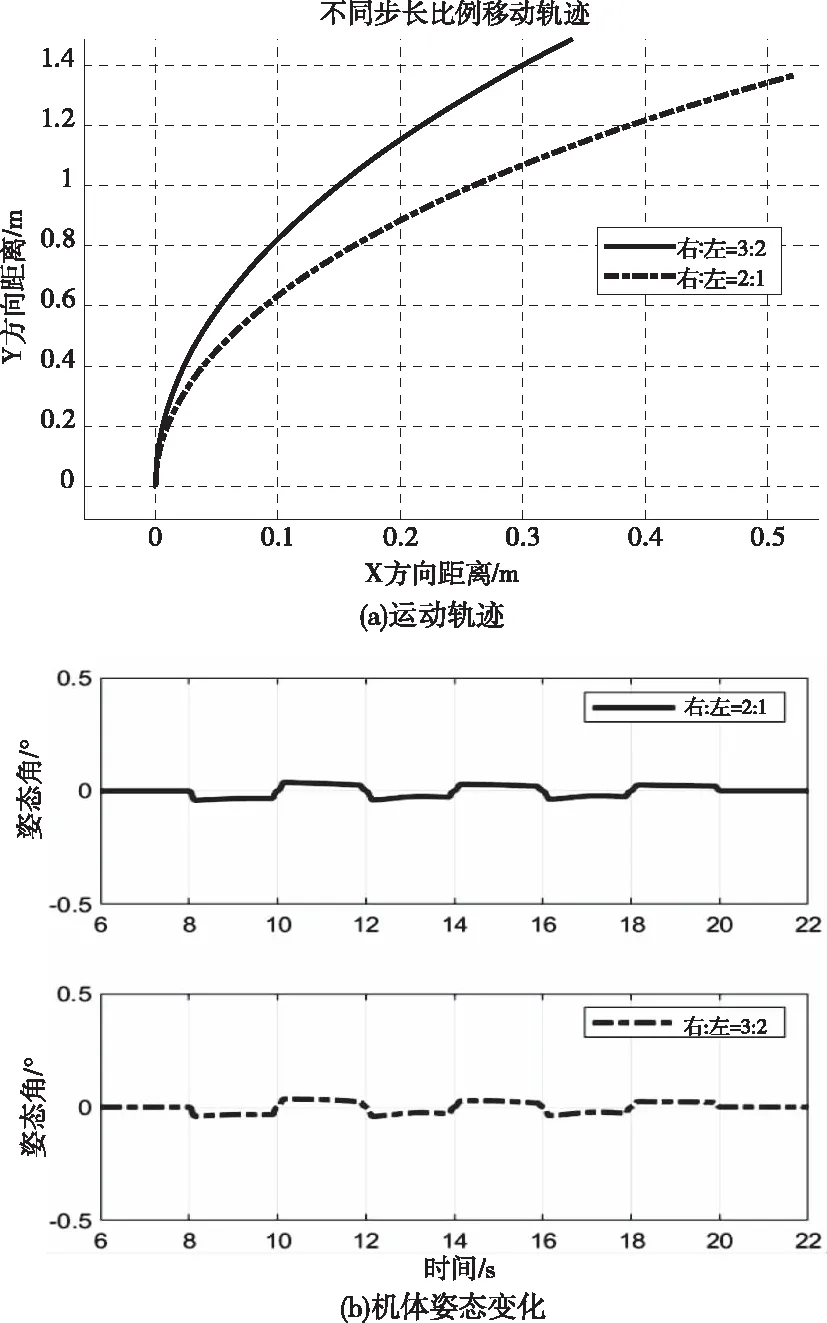
圖14 弧線步態仿真結果
6 結論
利用D-H理論方法建立六足機器人運動學模型,推導出正-逆運動學數學表達式,并結合所設計的機器人運動參考步態、落足點調整策略和機體姿態控制方法,在虛擬物理環境下對機器人進行運動仿真,通過以上運動仿真及數據分析可得結論:①采用基于模型的設計開發方法,驗證了在步態設計中所提方法和策略的可行性、正確性,加快了機器人算法的開發設計流程;②此物理構型的六足機器人基關節驅動能力決定了行進速度,髖關節是支撐腿的最大受力關節,其最大驅動能力決定機體質量上限,為后續六足機器人設計與控制提供參考。