無人機模擬訓練發展及運用研究綜述
2023-03-29 14:22:26矯永康沈如松李德棟徐煥翔
計算機仿真 2023年2期
關鍵詞:系統
矯永康,沈如松,李德棟,徐煥翔
(海軍航空大學航空作戰勤務學院,山東 煙臺 264001)
1 引言
與實裝訓練相比,模擬訓練具有不受場地、空間和氣候條件限制的優點[1-2],當前各軍方已基本形成了共識,把模擬訓練作為培養無人機操作員非常有效的方式。美國空、海軍都提出了進行100%綜合模擬訓練的目標要求,美陸軍也希望能夠在模擬器上進行大部分的訓練。印度在以色列的協助下,成立了無人機專職訓練機構,也利用模擬訓練系統開展無人機操作員訓練。據俄“織女星”公司透露,俄軍2014年開始裝備該公司生產的無人機操控員模擬訓練系統,該系統可通過3D模擬環境培訓無人機操控員,并全程記錄操控員動作,教練員可通過遙控系統和視頻回放對學員進行指導。此外,新加坡、加拿大都開始采購無人機模擬訓練系統開展訓練工作。
2 國外無人機模擬訓練系統發展現狀
目前,外軍無人機模擬訓練系統供應商及產品主要如下表1所示。
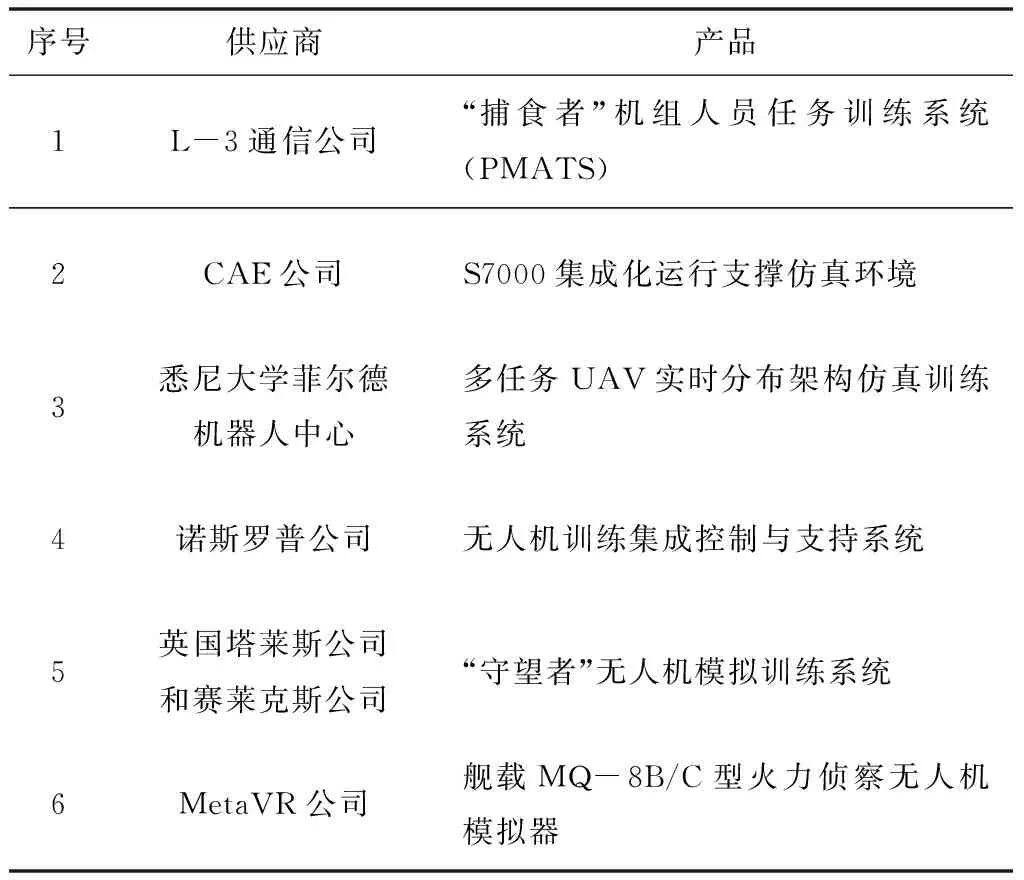
表1 典型無人機模擬訓練系統
2.1 “捕食者”模擬訓練系統
2007年,L-3通信公司簽署合同,在18個月內向克里奇空軍基地提供5部“捕食者”機組人員任務訓練系統(PMATS)[3]。PMATS訓練逼真度很高,提供完全沉浸的訓練環境,便于實際操作,尤其是仿真模擬軟件、實際飛行運行程序軟件和地面控制硬件的相互集成,能提供飛機平臺、傳感器和武器裝備的高逼真度模型。其模擬合成環境考慮了晝夜、風、惡劣天氣和熱效應等因素,并支持下一代“捕食者”和其它無人機系統,參考畫面見圖1。
在具體的教學過程中,教師應該以人為本、一視同仁,認真對待班級中的每一名學生,保護學生的自尊心。在運用慕課開展小學語文教學的過程中,教師還需要對教學時間進行一定的把控,切忌過度依賴慕課教學,使教學進度受到影響。
現在的祝國寺是1993年異地重建,距老祝國寺遺址8公里。經過20多年的發展,新祝國寺已形成五進五院的建筑群落,成為集佛教文化、園林藝術和休閑于一體的攬勝之地。
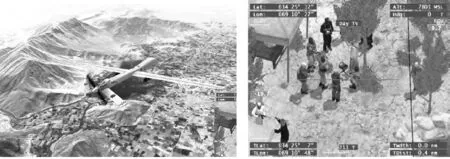
圖1 “捕食者”高逼真實時飛行仿真畫面和任務捕獲畫面
PMATS的升級版中,能模擬“MQ-9收割者”(Reaper)無人機系統。并在控制臺實現任務規劃,該系統具有數字化信息系統(DIS)和高層體系結構(HLA)兼容性,可實現多機聯合模擬。
方干又有七律《游稱心寺中島》,據《雍正浙江通志》越州稱心寺條載:“會昌中廢,大中三年,觀察使李褒奏重建。”[5]6431因而可以判斷方干游歷鏡湖中的稱心寺并留下詩作是在大中三年(849)方干40歲之后。
智慧水務戰略是水務公司轉型發展的重要動力,在戰略頂層設計中需要水務公司高層的大力支持,在戰略實施中也為水務公司帶來了實實在在的運營管理水平提升,解決了企業在人力、流程、財務、客戶服務等方面存在的若干管理問題和漏洞,未來將進一步為企業創新發展提供更加堅實的基礎支撐平臺。
2.2 CAE公司S7000系列高逼真無人機任務訓練系統
CAE公司的S7000提供集成化、完備的運行和支撐仿真環境,具備無人系統(UAS)任務訓練、任務計劃、任務操作人員管理以及數據分析等功能,如圖2所示。該任務訓練系統可與任何UAS的地面控制站(GCS)配置完成模擬任務訓練和評估,還可在模擬仿真和真實飛行狀態之間切換。在模擬仿真狀態下,任務管理站具有不同地形、天氣等環境因素設置能力,還允許指導教師設定虛擬的任務和練習腳本提供給受訓人員練習。
納入病例后發現不符合納入標準或未能按照治療方案完成治療的患者;未按規定用藥者或接受其他治療者;貼敷過敏者;發生嚴重不良事件或并發癥,無法繼續進行治療者。

圖2 CAE S7000系列高逼真無人機任務訓練系統
2.3 UAV多任務實時分布式架構仿真訓練系統
當前無人機型號種類繁多,所配套的地面控制站和模擬器在人機交互設計上也是五花八門,操作按鍵和顯示界面的位置千差萬別,在這種背景下經常出現生長培養的無人機操控員難以勝任崗位,還需再改裝培訓,造成時間和資源的浪費,同時由于人機界面的巨大差異,固有的操作習慣也會增大人為差錯發生的概率,因此必須研究通用化互操作技術,開發通用化地面站。

圖3 多任務UAV實時分布架構仿真訓練系統
2.4 美國諾斯羅普公司無人機訓練“集成控制與支持系統”
美國諾斯羅普公司為無人機操作人員訓練研制了“集成控制與支持系統(ICSS)”[4-5]。該項目旨在發展一套符合當今技術發展水平的,以計算機為基礎的飛行訓練系統,來增強當前和未來無人機的操作性能。ICSS系統能夠自動完成任務計劃,使控制人員能更有效地計劃、模擬并執行實際無人機飛行任務。
總之,生態林業的主要目的是改善環境質量,進而促進整個生態建設重點工程。造林技術推廣,林業的發展是非常重要的,所以在新的時代背景下,為了更好地提高造林技術建設質量,相關人員必須重視林業推廣技術,必須結合具體情況林業在相關領域的發展,要有一定的針對性,現階段,我國北方地區正在積極開展植樹造林活動。開展森林復墾活動,改善我國生態環境意義重大。森林資源的減少對我國未來的發展非常不利,因此在當前的發展過程中增加森林資源總量和造林是非常必要的。相信隨著我國林業部門的不斷努力,北方的森林資源總量將逐步增加,北方的經濟水平也將提高。
2.5 英國國防部“守望者”無人機沉浸式模擬訓練計劃
美國海軍在馬里蘭州帕圖森特河海軍航空站建造并開始運行多個便攜式的艦載MQ-8B/C型火力偵察無人機模擬器,使用MetaVR公司的帶有3D全景海洋狀態的虛擬現實場景生成器VRSG。該模擬器主要用于艦載作戰,幫助飛行器操作員(負責駕駛飛機)和執行任務軍官(控制搭載的傳感器等)學習并獲取火力偵察能力。虛擬現實場景生成器(VRSG)的窗口外視圖首先由海軍相關傳感器模擬處理,然后在訓練系統上提供光電和紅外傳感器模式。通過前視光電紅外模擬,操作員可以在不同的環境條件下,利用高倍率視角對MetaVR公司的3D船舶模型細節進行遠程分類。
2.6 美海軍MQ-8B型艦載火力偵察兵模擬器
“守望者”無人機由塔萊斯公司和賽萊克斯公司聯合研制,英國國防部投入大量資金研制了“守望者”無人機的模擬訓練系統,并制定了“守望者”無人機人員培訓計劃。其訓練基地位于拉克希爾市的英國皇家炮兵學院,使用馬歇爾公司研制的全任務模擬器,能真實地還原地面操控站操作過程,能夠捕捉和記錄訓練環境下的重要時間節點并全程記錄語音通信內容,而且教官可以對其進行標注,用于訓練評估與講評。

圖4 MQ-8B火力偵察兵模擬訓練虛擬現實場景
目前無人機的訓練方式主要包括實戰和模擬訓練,兩者都存在一定的局限性:實戰訓練資源消耗大、成本高、維護保障相對復雜,難以引入西方國家主力作戰機型參與,訓練模式受到實際條件約束,特情訓練不足;模擬訓練實戰化水平低,客觀評估難度大,對作戰人員的心理訓練不足。為解決上述問題,國外開展了基于將實戰(Live)、虛擬(Virtual)、構建(Constructive)集成的訓練架構研究[8-14],突破實際作戰環境與虛擬作戰環境平行互動關鍵技術。
要想不斷提升教學質量,應用型民辦本科高校必須高度注重“雙師型”教師隊伍的建設。目前,很多企業在招聘時,既要求教師具備豐富的理論知識,還要求他們具有一定的實踐經驗。因此,“雙師型”教師深受企業青睞,而企業為吸引這些教師便不斷提高福利待遇,這就導致大量教師離開應用型民辦本科高校而另謀職業。為改善這一現狀,應用型民辦本科高校必須建立健全教師獎勵機制,對表現好的教師給予一定的獎勵。這不僅可提高教師的生活水平,還可充分激發他們的工作積極性,從而全面提升應用型民辦本科高校的教學質量。
3 國內無人機模擬訓練系統發展現狀
基于現實增強技術的戰場環境構建技術能夠有效提高戰場環境的逼真度,增強現實生成的虛擬場景基于數據庫驅動,地形數據和威脅數據庫是其核心組成部分,其它的數據由飛行航路、報警信息、狀態提示、大氣數據、跑道信息等組成。地形的數據由海拔高度信息構成,也包括衛星圖像、特征數據、趨勢矢量數據、潛在的障礙物等。這些數據可以分為動態數據和靜態數據兩個部分,靜態信息是由導航數據、地形高度數據、障礙物數據及機場數據等組成。動態數據是由各種傳感器反饋的實時數據,如敵方威脅信息、方位數據、數據鏈、雷達數據、紅外圖像數據等組成。系統中通過這些數據綜合生成飛行軌跡、威脅/障礙物和地形等信息。增強現實信息采用三維顯示可增加真實感和沉浸感,三維增強現實信息必須支持多視點顯示,實現高效空間定位與態勢感知,增強現實場景處理機三維圖形引擎需實時完成與真實場景坐標的關聯,將虛擬場景圖形信息拼裝成顯示畫面,傳送給增強現實顯示終端顯示。
3.1 綜合控制指揮/模擬訓練車
北京航空航天大學利用仿真模擬技術自主地設計實現了“綜合控制指揮/模擬訓練車”一體化,如圖5所示。2010年,分別在河北沙河和內蒙古包頭進行了飛行試驗,效果良好。

圖5 綜合控制指揮/模擬訓練車
3.2 “天翅3”無人機地面指揮和模擬訓練系統
“天翅3”無人偵察機的地面指揮與仿真模擬訓練系統,為該機提供了嵌入式地面操縱、指揮和模擬訓練功能,設計合理,使用方便可靠,如圖6所示。
1.1 研究對象 選擇2016年12月-2018年9月在本院自然分娩,在產后42d常規復查時,通過超聲檢查(經腹和陰超)發現盆底器官位置異常,然后進行產后盆底康復訓練的產婦62例納入研究。患者平均年齡(28.4±0.61)歲,孕次(1.4±0.31)次,產次(2.3±0.41)次,產后平均(105.2±21.54)d。選擇同期非妊娠年輕女性45例作為對照組,平均年齡 (24.1±0.76)歲,有性生活史,未孕未育。

圖6 “天翅3”地面指揮和模擬訓練系統
3.3 翼龍Ⅰ和翼龍Ⅱ察打一體無人機模擬器
翼龍I無人機訓練模擬器功能與MQ-1捕食者A無人機訓練模擬器相當,一次1~2名教員可培訓兩名由飛行員和任務員組成的雙人機組控制1架翼龍I無人機。翼龍II無人機訓練模擬器在翼龍I 無人機訓練模擬器基礎上進一步加強了任務和特情訓練功能,一次1~2名教員可培訓兩名由飛行員和任務員組成的雙人機組控制1架翼龍II無人機或分別控制2架翼龍II無人機,實現了一站控雙機的模擬訓練功能。
3.4 彩虹無人機模擬訓練系統
中國航天科技集團有限公司第十一研究院自主研發的彩虹系列無人機模擬訓練系統,可兼容彩虹系列多種型號無人機平臺及武器系統,實現全任務流程仿真訓練,如圖7所示。并創新地加入了交互式教學系統及任務系統,可用于戰術戰法訓練、敵我對抗訓練及戰前演練等用途,更加貼近實戰需要。自2015年第一代方艙版按照真實地面站布局進行設計,第二代無人機模擬訓練系統的載荷操作席位,外觀及操作界面與新一代通用地面指控站保持一致,同時,還裝載了基于視景仿真技術的戰場三維態勢系統。為了提高互動性,系統裝載了針對載荷及武器操作手的初級訓練任務。

圖7 彩虹無人機第一代、第二代模擬訓練系統
各研制單位主要面向單型無人機的流程操作模擬訓練,所構建模擬環境的逼真度不高,主要存在產品種類數量不足、功能性能不完善、缺少總體規劃等問題,主要體現在認識層次較低、功能層次偏弱、通用化程度不高、與任務訓練融合度不夠[7]。
4 無人機模擬訓練關鍵技術發展現狀
無人機模擬訓練系統一般由仿真激勵分系統、考核評估分系統、模擬控制分系統組成,系統關鍵技術主要包括:系統架構技術、通用化互操作技術、戰場環境構建技術、模擬訓練評估技術等4類。
4.1 系統架構技術
從相關資料和國外用戶使用情況分析,以美軍捕食者無人機為例,其地面控制站不具備嵌入式訓練功能。所有模擬訓練課程依托訓練模擬器完成,具備飛行訓練(含飛行前檢查、起飛、巡航、著陸、故障)和任務訓練(EO 電視/紅外、武器、故障、任務系統),鏈路仿真(延時、降級、故障)及教員控制等功能,一次1名教員可培訓一個由飛行員和任務員組成的雙人機組控制1架捕食者無人機[6]。迄今已有26套PMATS交付美空軍,尚未見到美軍無人機訓練模擬器聯入美軍分布式任務操作網絡(DMON)的報道。
基于LVC無人機模擬訓練架構中的三個部分共享相同的視圖場景,典型戰區級訓練場景基于指揮官輸入開展,虛擬和構建作戰單元由仿真執行人員配置,實現整個戰場態勢綜合與生成,為增強任務逼真度開展三維虛擬模型的增強現實顯示信息的畫面組織及實時渲染技術研究,以及增強現實立體顯示技術研究,形成增強現實信息沉浸感知能力。該架構面向訓練對象覆蓋無人機作戰部隊的所有參戰人員,能夠突破戰場資源、空域等限制,支撐大規模、跨區軍事演練,能夠通過訓練/反饋提升訓練效能,滿足新戰術戰法、特情演練與評估需要,并節約訓練評估成本。基于LVC無人機模擬訓練可完成旨在鍛煉操作人員的操作水平和機組獨自遂行任務能力的集中式訓練,以及使無人機操作人員融入體系化作戰模式的分布式訓練。
4.2 通用化互操作技術
悉尼大學菲爾德機器人中心開發了多任務無人機(UAV)實時分布架構仿真訓練系統,該系統以以太網為總線結構,可以同時控制3架或更多UAV的實時飛行和任務載荷。該系統同時使用數字UAV模型和任務模型進行任務模擬和驗證,具備實時飛行和任務載荷的實際操縱與模擬仿真訓練雙重功能,如圖3所示。
這里,我們教師從學生感興趣的故事情景著手,讓學生從故事中體驗依次不斷地重復、無限和循環的數學思想,突破了教學的難點,有效地增進了課堂教學效果。可見,故事的作用在于使問題更接近學生的心理,調動學生的積極性,起到了“引見以語,導以行”的作用。
為滿足多種型號無人機的模擬訓練任務,模擬器采用通用模塊+專用模塊的方式實現通用化,通用模塊采用統一的軟硬件實現通用功能,專用模塊采用不同的軟硬件實現不同型號的專用功能。所謂的通用功能是從功能中抽象出的與不同無人機之間差異無關或松耦合的應用功能,專用功能則是與不同無人機特殊應用相關的功能。為了實現模擬器開放兼容,在硬件架構、軟件架構、物理接口、信息接口、人機接口等方面進行通用化設計。
4.3 戰場環境構建技術
目前無人機模擬訓練系統信息化戰場訓練環境(對抗環境、戰場環境、協同環境等)建設不足,致使無法有效開展無人機在復雜戰場環境下的對抗作戰訓練、多機協同作戰訓練等,不能有效支撐實戰化訓練[15-19]。
國內主要研制的無人機模擬訓練系統有:北京航空航天大學無人機綜合控制指揮/模擬訓練車、彩虹無人機模擬訓練系統、“天翅3”無人機地面指揮和模擬訓練系統、翼龍Ⅰ和翼龍Ⅱ察打一體無人機模擬訓練系統等。
4.4 模擬訓練評估技術
目前,先進無人機模擬訓練系統中已具備一定的考核評估功能。模擬訓練系統建立以作戰任務為中心、可操作性訓練效果評估指標體系,通過對任務完整度和作戰效果分析評判作為關鍵評價指標,結合任務執行過程的操作和戰術使用情況,全面客觀地對訓練效果進行評價。通過捕捉和記錄訓練環境下的重要時間節點及語音通信內容,教官可以對訓練過程進行標注,用于訓練評估與講評[20-24]。
5 無人機模擬訓練系統發展趨勢
5.1 更加注重滿足實戰化任務訓練需求
現有的訓練系統中,往往重視平臺操控而忽略任務執行,隨著無人機智能化、自主化水平的提高,需要無人機的操作員更多的關注任務的完成情況和執行效果。這就需要在無人機操作員的培養中,盡可能多的使其進行任務操作的訓練。
一方面是機組成員密切配合共同完成作戰任務,模擬訓練必須滿足整個機組的協同訓練需求。另一方面以體系對抗為主要特征的信息化戰爭,強調整個力量體系中各戰斗單元的協同。高逼真任務模擬訓練還必須具備與聯合部隊分布式任務訓練演習協同的能力,實現從單純的操作技能模擬訓練向戰術乃至戰役模擬訓練發展,不斷增加虛擬仿真在高度逼真、精確和實時的任務演習訓練中的應用,使各類模擬訓練系統在高度逼真的綜合模擬戰場環境中實現共同訓練、演練。
5.2 更加注重滿足體系化協同和聯合訓練需求
當今的大規模作戰行動通常為聯合作戰行動,需要并強調各作戰單元的相互依賴性,隨著無人機技術的發展,無人機在聯合體系作戰環境下的重要程度日益增加。在這樣的作戰背景下,需要開展跨平臺、艦地協同的聯合模擬訓練,可以指導各作戰部隊之間的協同作戰,優化各種作戰能力的聯合運用。
已有的任務操作訓練主要通過在無人機的仿真平臺上增加偵察載荷、武器載荷的仿真系統,通過視景仿真,模擬完成偵察和打擊。訓練過程相對簡單,對于戰場環境、移動目標、特情處置等涉及較少,與實戰差距較大,需要一種能夠更加貼近實戰的任務訓練系統,使得無人機機組能夠在接近真實的戰場環境下,執行特定的任務,并具有處置隨時發生的特情的能力。
5.3 訓練考核向定量化、精細化轉變
無人機模擬訓練過程具有不唯一性,因此對訓練人員的考核評估不能使用單一答案或流程進行評價。考核評估不但需要考慮受訓人員的操作步驟、操作時間、操作方法,還需要對全流程進行記錄,綜合評價。因此,需要研究并構建科學、量化、準確的無人機模擬訓練考核體系,研究針對模擬操作全過程的定性和定量的考核方法。
5.4 產品通用化、標準化水平不斷提高
無人機系統類型多,主要表現為任務載荷的多樣化,但指揮控制站通用化的趨勢明顯。為此,各國軍方都在力推模擬訓練系統的通用化。美國陸軍即計劃研制一種通用無人機模擬器,可用于“獵人”,“影子”以及新型的“勇士”無人機的模擬訓練[25]。同時逐步形成系列,積累一整套高效科學的模塊化和標準化研制經驗,提高研制效率、降低研制成本。
當前不同類型模擬訓練系統完全隔離,沒有統一系統架構與頂層設計,不同裝備、不同兵種間的協同作戰是未來戰場的重要樣式,通過構建一個適用于多種無人機的系統架構體系,在頂層實現跨裝備、跨兵種的協同模擬演練與戰法推演,指導無人機模擬訓練系統的發展。
5.5 作訓一體化設計成為趨勢
未來的無人機模擬系統一般包括一個完整的地面控制站、任務管理站和全套模擬的任務載荷,它可針對任何無人機進行重構,可連接到正在操作的地面指揮站,可在控制實際無人機或模擬無人機之間切換,為操作員提供模擬訓練和實際作戰操作一致的工作界面,實現作戰和模擬訓練的一體化設計。
6 結束語
無人機模擬訓練可用于部隊院校、無人機部隊(包含消防、武警)及地方院所、無人機使用開發單位的操作人員培訓,使受訓人員能夠在近似實裝環境下進行系統監控、任務控制、任務規劃、飛行控制等站位的基本技能培訓,對提高無人機指揮、操作人員的技戰水平和保證訓練安全具有重要意義。在民用無人機爆炸式發展的形勢下,該項技術將是培養地方無人機人才的重要手段,具有廣闊前景和巨大經濟社會效益。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32