閉式泵閥聯(lián)控電液驅動系統(tǒng)的設計
2023-03-02 02:17:20周加永孟小凈王亮寬吳瀟璞
兵器裝備工程學報 2023年2期
周加永,孟小凈,王亮寬,王 妍,吳瀟璞
(1.西北機電工程研究所,陜西 咸陽 712099;2.北京理工大學 機電學院,北京 100081)
1 引言
助力機器人能幫助人類承載重物、減輕體能消耗[1],在士兵負重行軍、戰(zhàn)場救援、抗震救災、建筑施工、康復醫(yī)療等軍民兩用領域有著廣泛的應用前景[2]。目前,絕大部分助力機器人選用“髖關節(jié)+膝關節(jié)+踝關節(jié)”的結構形式,髖、膝、踝3個運動關節(jié)中,髖關節(jié)和膝關節(jié)需要較大的關節(jié)驅動力和功率,多為主動驅動,踝關節(jié)為被動驅動。
近年來,國內外各研究機構對助力機器人進行了大量的研究,目前應用在助力機器人上的驅動方式主要包括電機驅動、液壓驅動、氣壓驅動以及人工肌肉驅動等[3]。
液壓驅動方式功率密度高,液壓元件的微型、高效、集成化設計對提高外骨骼關節(jié)的驅動效率至關重要。BLEEX助力機器人第一代樣機將液壓驅動系統(tǒng)進行了高度的集成,并設計了專用的汽油機動力源HEPU發(fā)動機,系統(tǒng)重27 kg,輸出功率2.5 kW[4];Hongchul Kim等[5]設計的液壓驅動助力機器人,將電機與液壓元器件進行了集成,開發(fā)了HPUC液壓集成裝置,采用雙模式控制;Xiao-ping OUYANG等[6]開發(fā)了小型液壓動力裝置CHPU[7],重約20 kg,最大可向機器人提供1.5 kW液壓能源與160 W直流電力。
電機驅動方式結構簡單、響應快,目前的電機很難直接滿足助力機器人大承載的應用需求,一般應用于助老助殘等民用領域,主要驅動方式有關節(jié)直驅和電機與末端執(zhí)行機構分離2種方式。關節(jié)直驅典型的代表是HAL[8]、IHMC[9],Eks,eLGEs等。電機減速機與末端機構分離的驅動形式可滿足運動末端輕小化設計要求,Michele Xiloyannis[10]設計了一種用于上肢柔性外骨骼一驅多的驅動系統(tǒng),采用模塊化設計,動力源來自一個電機,通過控制配置在助力機器人上的離合器進行不同關節(jié)的驅動;Rafael R.Torrealba等[11]設計了一種變剛度阻抗控制的膝關節(jié),通過電機、彈性元件和齒輪實現雙向驅動;Hun Keon Ko等[12]設計了安裝在助力機器人背部的單一執(zhí)行機構,通過差動齒輪機構利用套索同時驅動2條腿。
氣動人工肌肉的柔順性好,但是存在非線性,難以實現精確地控制的問題。根據電機和人工肌肉驅動的特點,Sardellitti等[13]于2007年提出了氣-電混合驅動;Sang-Ho Hyon等[14]第一次將氣-電混合驅動應用于助力機器人。
2 泵閥聯(lián)控電液驅動系統(tǒng)的創(chuàng)新設計
目前國內多家單位對液壓驅動型助力機器人進行了研究,大都采用基于閥控的液壓驅動系統(tǒng),通過對液壓閥的控制,控制液壓缸所需流量,完成液壓缸所期望的動作。閥控方法是液壓系統(tǒng)的動力單元為恒定的、不可控的,只需精確控制閥的動作即可完成液壓缸的操作,這種控制方法比較簡單,但是浪費能源,因為保持動力單元的恒定需要電機不停地轉動。
2.1 泵閥聯(lián)控電液驅動系統(tǒng)設計
采用閥控方案的助力機器人能量利用效率低,是因為助力機器人執(zhí)行各種動作時,執(zhí)行器所受負載變化比較劇烈,而且大負載出現的時間占整個工作總時間的比重較小,導致系統(tǒng)供油壓力與執(zhí)行器負載所需供油壓力匹配狀態(tài)非常差,大多時間處于過度匹配狀態(tài),必然在控制閥口處造成大量的壓力損耗,導致大量能量以熱的形式損失掉。為了提高助力機器人液壓系統(tǒng)效率,根據人體負重攜行的運動特點以及膝關節(jié)和髖關節(jié)的運動能量關系,對伺服直驅泵控液壓系統(tǒng)進行改進設計,開發(fā)了泵閥聯(lián)控助力機器人液壓驅動系統(tǒng),該系統(tǒng)能提高供給壓力與執(zhí)行器負載所需壓力的匹配度,改善匹配狀態(tài)可從2個方面進行調節(jié):一是對系統(tǒng)供給壓力匹配調節(jié),二是對執(zhí)行器負載匹配調節(jié)。
該系統(tǒng)采用了以泵控直驅液壓容積控制為主,以伺服閥節(jié)流控制為輔,其原理如圖1所示,該系統(tǒng)節(jié)能高效、調速范圍寬、可靠性高、壽命長,易實現集成一體化,油路簡化,管道數量很少,系統(tǒng)噪音小,且不存在系統(tǒng)高壓引起的管路振動問題。
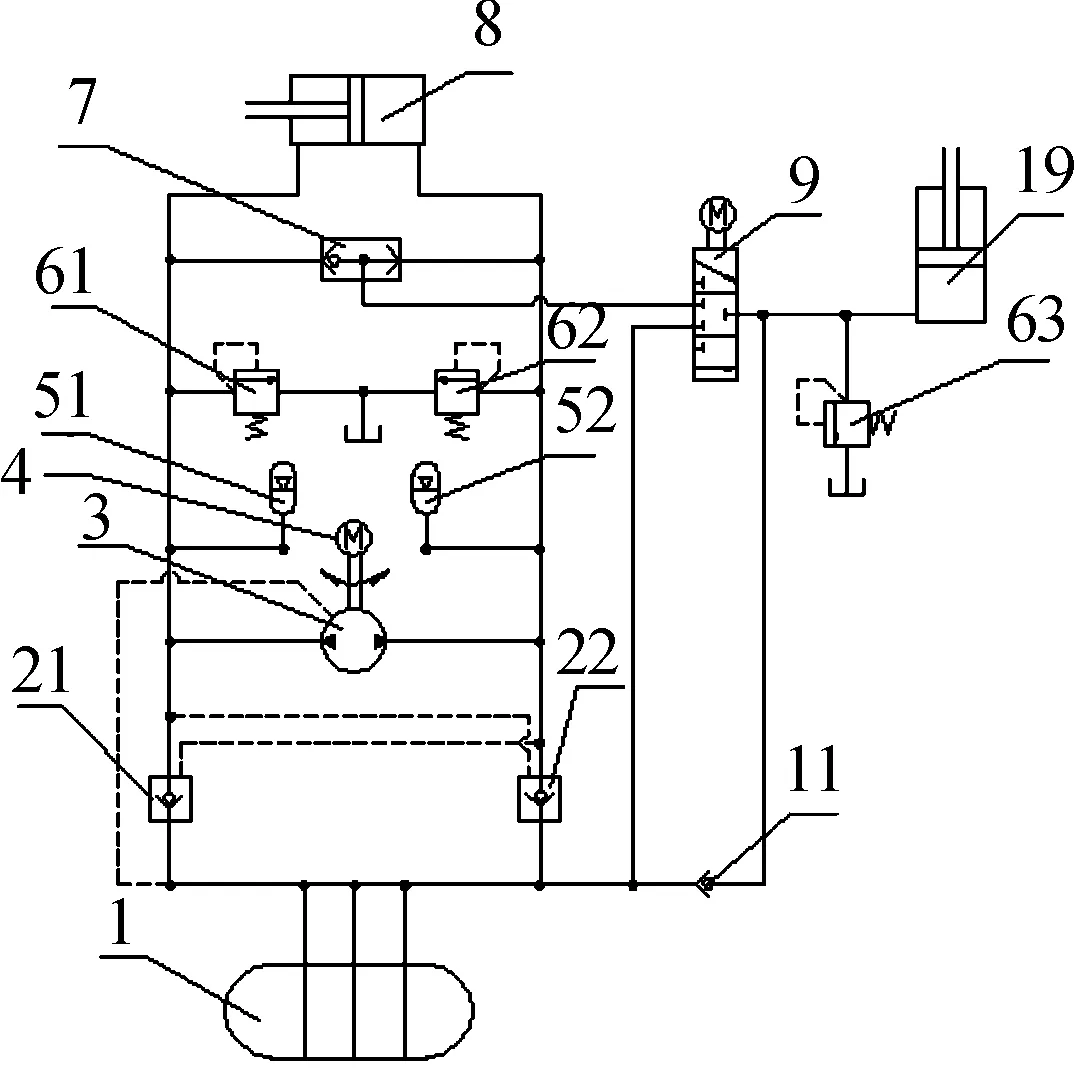
1.壓力油箱;21.液控單向閥;22.液控單向閥;3.雙向液壓泵;4.伺服電機;51.蓄能器.52.蓄能器.61.溢流閥;62.溢流閥;63.溢流閥;7.梭閥;8.髖關節(jié)液壓缸;9.伺服閥;10.膝關節(jié)液壓缸;11.單向閥
泵閥聯(lián)控助力機器人液壓驅動系統(tǒng)不是通過改變泵的排量而是通過調節(jié)電機的轉速改變其輸出流量,在助力過程中,伺服電機驅動泵工作,根據助力機器人的姿態(tài)和外負載的情況泵直接驅動髖關節(jié)油缸動作輸出與外負載相匹配的力,同時膝關節(jié)油缸的油液通過控制閥“借”自髖關節(jié)油缸的高壓腔為膝關節(jié)助力并與外負載相匹配,通過髖關節(jié)油缸和膝關節(jié)油缸的聯(lián)合作用實現助力機器人系統(tǒng)的助力。該系統(tǒng)通過髖關節(jié)油缸和膝關節(jié)油缸的驅動力矩匹配,可以實現髖關節(jié)和膝關節(jié)全程聯(lián)合助力,能量小、助力效率高。在下蹲、下坡、下臺階時膝關節(jié)的阻尼油液不是以節(jié)流的方式回到油箱,而是以回饋方式回到髖關節(jié)油缸的驅動腔,在起立、上坡、上臺階時,膝關節(jié)油缸驅動時的反作用力又作用于髖關節(jié)驅動扭矩的方向上,綜合2種情況的效果,達到膝關節(jié)重力勢能的回收和髖關節(jié)驅動能源的減少。
2.2 泵閥聯(lián)控液壓系統(tǒng)特點
泵閥聯(lián)控助力機器人液壓驅動系統(tǒng)的創(chuàng)新性主要是將容積控制與節(jié)流控制集成到一起,具有以下顯著優(yōu)點:
1) 可以減小液壓系統(tǒng)元器件的數量,簡化系統(tǒng)原理,實現集成一體化,重量輕并與機械結構完美結合;
2) 對傳動介質及過濾要求低,減小液壓泵的磨損和噪音,提高系統(tǒng)的使用壽命和可靠性;
3) 電機與作為執(zhí)行元件的液壓缸可以做到較為理想的功率匹配;
4) 節(jié)能效果顯著,壓力油可以“互借”,避免了不必要節(jié)流損耗、溢流損耗、泄荷損耗;
5) 管道布置小,極大地消除了管道對伺服系統(tǒng)的影響,不存在管道振動問題,并且整體結構美觀緊湊。
2.3 泵閥聯(lián)控液壓系統(tǒng)集成化設計
由于負重助力機器人結構與用途的限制,液壓系統(tǒng)的安裝空間十分有限,因此對泵閥聯(lián)控液壓系統(tǒng)在結構上要實現高度集成,做到體積小、重量輕、效率高。為此,設計了液壓集成塊,將伺服電機、液壓泵、液壓閥、傳感器以及液壓缸有效集成為一個緊湊的液壓動力單元,集成后顯著減少了管路連接,降低了液壓系統(tǒng)的復雜性,提高了系統(tǒng)的可適應性,具有結構緊湊、安裝和維護方便、泄漏少、振動小等優(yōu)點。
液壓集成塊在設計過程中需考慮各種耦合關系,例如不同油路干涉耦合、液壓元件布局干涉耦合以及各油口耦合等。同時,設計完成的油路可能存在欠連通、泄漏連通,以及不滿足最小壁厚等要求,需要進行驗證并進行適當調整[15]。閉式液壓系統(tǒng)的散熱性比開式液壓系統(tǒng)差,在設計過程中需要對其散熱性能進行重點研究[16],可借助仿真手段進行熱分析,優(yōu)化液壓系統(tǒng)流道結構,避免系統(tǒng)產生過大噪音和壓力損失,通過多輪次的優(yōu)化完成液壓集成塊的設計,并進行有效性驗證,滿足設計要求,設計過程如圖2所示。

圖2 液壓集成塊設計過程Fig2 Design process of hydraulic manifold block
3 助力機器人液壓驅動系統(tǒng)建模與動態(tài)特性分析
3.1 液壓驅動系統(tǒng)建模
對系統(tǒng)進行適當的簡化,模型如圖3所示。
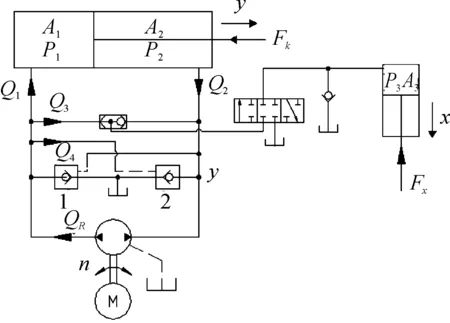
圖3 液壓系統(tǒng)簡化模型Fig3 Simplified model of hydraulic system
根據圖3建立液壓系統(tǒng)模型。
定量泵的流量方程為:
QB=QR+QL=Dpn
(1)
對式(1)進行拉氏變換,有:
QB(s)=DpN(s)
(2)
式(1)—(2)中:n為定量泵的轉速,r/s;Dp為定量泵的排量,m3/r;QB為定量泵的理論流量,m3/s;QL為定量泵的泄露量,m3/s;QR為定量泵的實際流量,m3/s。
定量泵泄露量與壓力關系方程為:
QR=QB-QL(3)QL=p1λB
(4)
式(3)—(4)中,λB=Cip+Cep,λB為液壓泵的總泄漏系數,m3/(s·Pa),Cip為液壓泵的內泄系數,m3/(s·Pa),Cep為液壓泵的外泄系數,m3/(s·Pa)。
對式(3)、式(4)進行拉氏變換,有:
QR(s)=QB(s)-P1(s)λB
(5)
液壓泵的扭矩方程為:
(6)
式(6)中:TL為液壓泵產生的負載轉矩(N·m);η為機械效率。對式(6)進行拉氏變換,有:
(7)
當髖關節(jié)活塞正向運動時,分別建立髖關節(jié)油缸、膝關節(jié)油缸、液控單向閥連續(xù)性方程為:
(8)
Q1=QR-Q3-Q4
(9)
QR=QB-QL
(10)
(11)
(12)
由式(8)—(12)可得出髖關節(jié)活塞正向運動時的連續(xù)性方程為:
(13)
式(13)中:n為定量泵的轉速,r/s;Dp為定量泵的排量,m3/r;QB為定量泵的理論流量,m3/s;QR為定量泵的泄露量,m3/s;QL為定量泵的實際流量,m3/s;Q3為到膝關節(jié)油缸流量,m3/s;Q4為通過液控單向閥2流量,m3/s;Cip為液壓泵的內泄系數,m3/(s·Pa);p1為髖關節(jié)油缸無桿腔壓力,Pa;p2為髖關節(jié)油缸有桿腔腔壓力,Pa;p3為膝關節(jié)油缸高壓腔壓力,Pa;Cep為液壓泵的外泄系數,m3/(s·Pa);Cim為髖關節(jié)油缸的內泄系數,m3/(s·Pa);Cem為髖關節(jié)油缸的外泄系數,m3/(s·Pa);λx為膝關節(jié)油缸泄露系數,m3/(s·Pa);λk為液壓泵及髖關節(jié)油缸泄露系數,m3/(s·Pa);λ為液壓泵及髖關節(jié)、膝關節(jié)油缸泄露系數,m3/(Pa·s);Vx為膝關節(jié)油缸高壓腔及進油管路油液體積,m3;A1為髖關節(jié)油缸無桿腔的面積,m2;A2為髖關節(jié)油缸有桿腔的面積,m2;A3為膝關節(jié)油缸面積,m2;A4為液控單向閥控制腔面積,m2;z為液控單向閥控制活塞位移,m2;y為髖關節(jié)油缸活塞的位移,m;x為膝關節(jié)油缸活塞的位移,m;V1為髖關節(jié)油缸大腔在由靜止開始運動時的容積,m3;Vp為液壓泵高壓腔的容積,m3;Vg為管路的容積,m3;Vk為髖關節(jié)油缸無桿高壓腔、液壓泵高壓腔及進油管路油液體積,m3;V為髖關節(jié)無桿腔、膝關節(jié)油缸高壓腔、液控單向閥控制腔、液壓泵高壓腔容積及進油管路油液體積,m3;βe為有效體積彈性模量,Pa。
由以上參數定義可得:
λk=Cim+Cem
λ=λk+λx
Vk=V1+Vp+Vg
V=Vk+Vx+V4
根據假設條件,液壓油流經梭閥和轉閥的壓力損失忽略不計,壓力油箱內壓力視為恒壓。考慮低壓腔壓力為常數,在線性化分析中包含低壓腔壓力的項可以略去,根據式(13)可得:
(14)
對式(14)進行拉氏變換,有:
(15)
根據牛頓第二定律,髖關節(jié)油缸正向運動時的力平衡方程為:
(16)
式(16)中:M為油缸活塞質量,kg;Bm為粘性阻力系數,N/(m/s);K為負載彈簧剛度,N/m。
忽略回油壓力,即p2=0,對式(10)進行拉式變換,可得:
P1(s)A1=MY(s)s2+BmY(s)s+KY(s)+Fk(s)
(17)
(18)
柱塞泵液壓系統(tǒng)在柱塞泵與電機之間安裝有2個厚度4 mm、內徑8 mm的U形旋轉密封,會產生一定的摩擦扭矩。
U形密封圈帶來的回轉平臺的摩擦力為:
f=PDπμb
(19)
代入式(20),即可得到摩擦力矩為:
(20)
式(20)中:P為總負荷(包括充氣壓力和運動負荷);D為轉軸的回轉直徑;μ為密封圈與轉軸的摩擦系數;b為密封圈與轉軸的接觸面寬度;R為運動的回轉半徑。
對伺服電機進行模型建立,按照電機拖動系統(tǒng)基本運動公式,有:
(21)
式(21)中:Td為電磁轉矩,N·m;TL為負載力矩,N·m;Jpm為電動機轉子和負載折合到電機軸上的轉動慣量,kg·m2;D為電機摩擦阻尼,N·m·s/rad;ω為轉子角速度,rad/s。
電機的電磁轉矩可表示為:
Td=KtId
(22)
式(22)中:Kt為轉矩常數;Id為電流。
反電動勢為:
Ed=Keω
(23)
式(23)中:Ed為反電動勢,V;Ke為電動機參數,稱為反電勢系數,V/(rad/s)。
電動機的等效電樞回路中,根據基爾霍夫電壓定律,有:
(24)
式(24)中:Ud為定子電壓,V;Id為定子電流,A ;Rd為定子電阻,Ω;Ld為定子電感,H。
(25)
式(25)中:Ufd為額定電壓,V;nfd為額定轉速,r/ min。
對式(22)—式(25)進行拉氏變換,可得:
(26)
Td(s)=KtId(s)
(27)
Ed(s)=Keω(s)
(28)
Ud(s)=RdI(s)+LdI(s)s+Ed(s)
(29)
根據負重助力機器人液壓驅動系統(tǒng)的特點,分別建立了液壓泵、伺服電機、髖關節(jié)油缸、膝關節(jié)油缸、液控單向閥連的數學建模,找出了影響系統(tǒng)動態(tài)特性的主要因素,即液壓泵的排量Dp、液壓缸有效面積A1、液壓執(zhí)行機構及負載重量M、液壓缸的粘性阻尼系數Bm。液壓驅動系統(tǒng)各參數的賦值如表1所示。
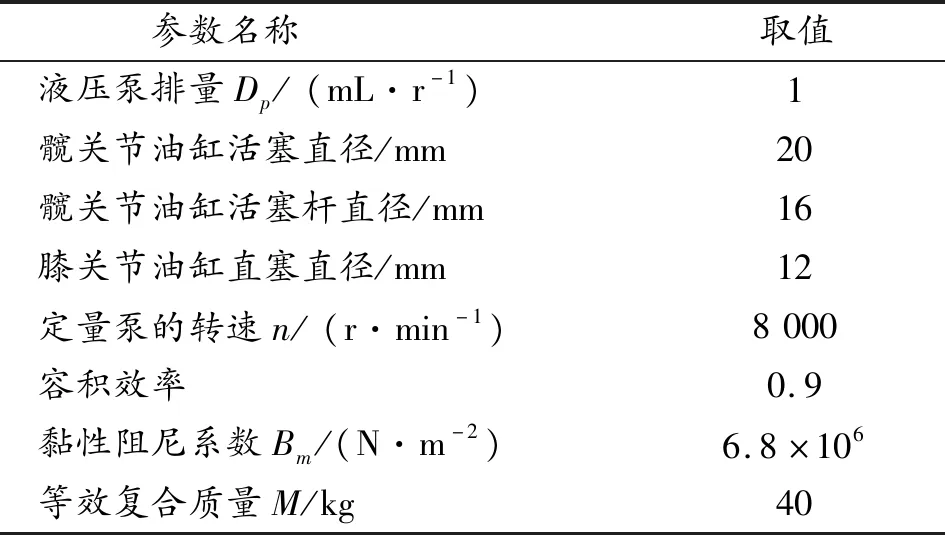
表1 液壓驅動系統(tǒng)各參數的賦值Table 1 Assignment of parameters of hydraulic drive system
3.2 結構參數改變對系統(tǒng)動態(tài)特性的影響
動態(tài)響應的快速性、穩(wěn)態(tài)跟蹤的高精度是系統(tǒng)的主要性能指標,結構參數和控制器性能是影響系統(tǒng)動態(tài)特性的主要因素。其中,結構參數主要包括液壓泵的排量Dp、液壓缸有效面積A1、液壓執(zhí)行機構及負載重量M、液壓缸的黏性阻尼系數Bm。圖4—圖7是依次改變參數Dp、A1、M、Bm時系統(tǒng)階躍響應動態(tài)特性的仿真結果。
3.2.1液壓泵的排量Dp
由圖4可知,隨著液壓泵排量Dp的增加,階躍上升時間變短,快速性升高,但是超調量增大,對系統(tǒng)的穩(wěn)定性會產生一定的影響,增大Dp有利于系統(tǒng)動態(tài)特性的提高。

圖4 參數Dp不同時的系統(tǒng)階躍響應特性Fig.4 Step response characteristics of the system with different parameters DP
3.2.2液壓缸的有效面積A1
由圖5可知,隨著液壓缸有效面積A1的增大,系統(tǒng)階躍上升時間增大,快速性降低,調節(jié)時間變長,但是超調量減小,所以減小A1有利于系統(tǒng)動態(tài)特性的提高。
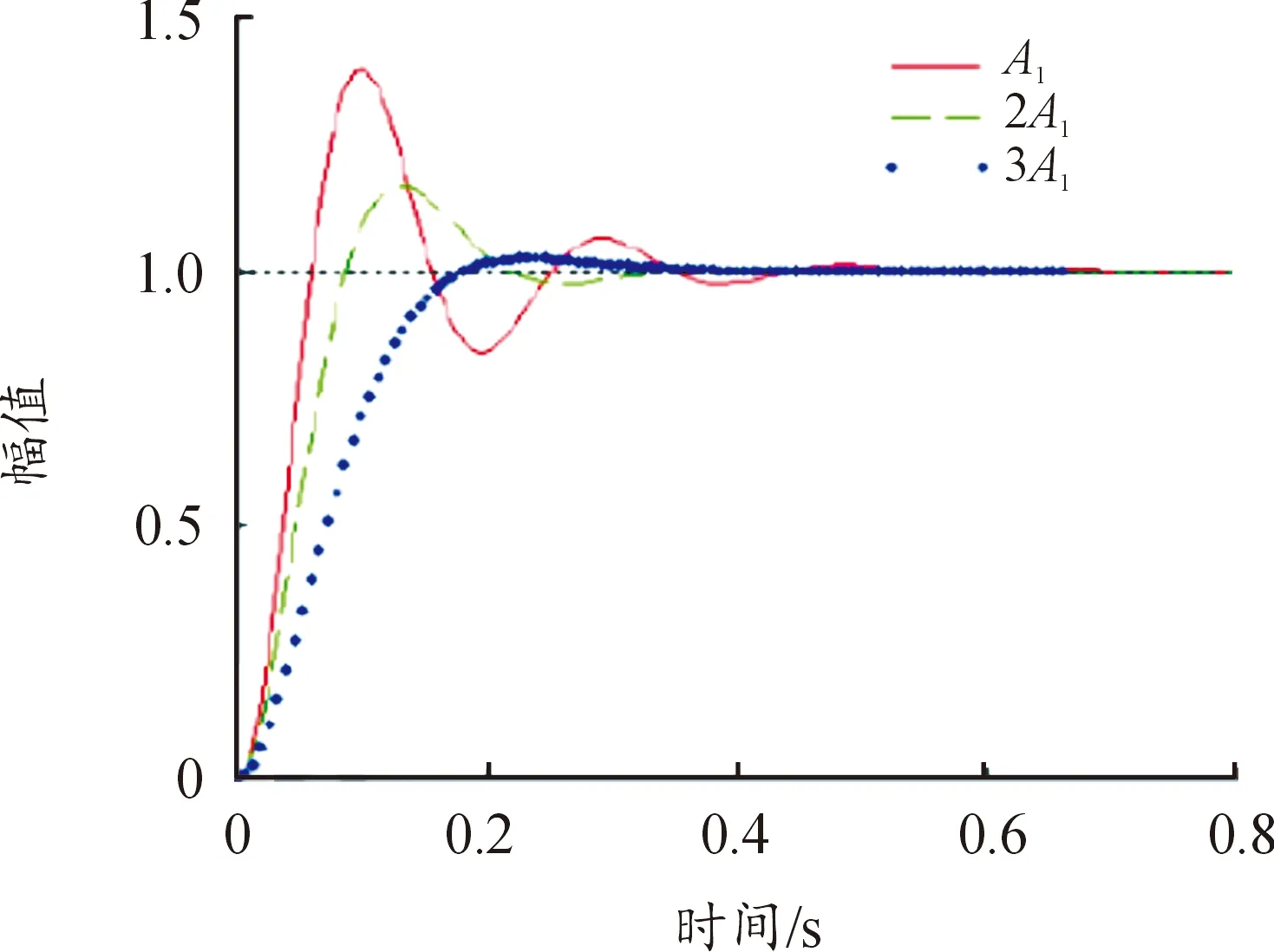
圖5 參數A1不同時的系統(tǒng)系統(tǒng)階躍響應特性Fig.5 Step response characteristics of the system with different parameters A1
3.2.3液壓執(zhí)行機構及負載的參數M
由圖6可知,隨著參數M的增大,系統(tǒng)階躍響應快速性略有減小,系統(tǒng)超調量增大,所以減小M有利于系統(tǒng)動態(tài)特性的提高。

圖6 參數M不同時的系統(tǒng)階躍響應特性Fig.6 Step response characteristics of the system with different parameters M
3.2.4液壓缸的粘性阻尼系數Bm
由圖7可知,隨著參數Bm的增大,系統(tǒng)階躍響應快速性略有減小,系統(tǒng)超調量增大,所以減小Bm有利于系統(tǒng)動態(tài)特性的提高。

圖7 參數Bm不同時的系統(tǒng)階躍響應特性Fig.7 Step response characteristics of the system with different parameters Bm
通過以上分析可知,要提高泵閥聯(lián)控液壓驅動系統(tǒng)的動態(tài)特性,在系統(tǒng)結構方面可采取以下措施:一是液壓泵要先考慮較大的排量,以滿足機構速度響應要求,再盡量選轉動慣量較小、容積效率較高的液壓泵;二是要合理設計或選用液壓缸等執(zhí)行機構的參數,在滿足工作需求的情況下盡量減小無效容積、執(zhí)行機構的體積和質量;三是選用有效體積彈性模量較大的液壓油液,盡量減小傳輸管道的長度,采用短而直且氣密性好的油管。
4 結論
根據人體負重攜行的特點和助力機器人的實際需求,創(chuàng)新性地設計開發(fā)了泵閥聯(lián)控液壓系統(tǒng),并建立了其數學模型。通過建模仿真分析找出了影響系統(tǒng)動態(tài)特性的主要因素和變化規(guī)律,通過仿真證明其具有較好的性能,對助力機器人液壓驅動系統(tǒng)微小型液壓元器件、集成式閥塊以及高功率密度伺服電機的設計與選型提供了參考依據;泵閥聯(lián)控電液驅動系統(tǒng)實用性強、效率高,對助力機器人早日實現工程化具有一定的技術推動作用。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業(yè)設計(2022年8期)2022-09-09 07:43:20
科學大眾(2021年9期)2021-07-16 07:02:40
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45