基于“兩個細則”考核的燃煤機組自動發電控制系統優化及應用
2023-02-22 02:47:46張鳳忠弭尚文馮紹偉
東北電力技術 2023年1期
張鳳忠,弭尚文,張 華,馮紹偉
(1.國家電投集團東北電力有限公司,遼寧 沈陽 110500;2.中電投東北能源科技有限公司,遼寧 沈陽 110015; 3.朝陽燕山湖發電有限公司,遼寧 朝陽 122099)
1 存在問題
煤炭資源短缺一直是全球面臨的問題。如何對現有資源合理化利用,實現可持續發展是當前亟需解決的問題。一方面對現有不可再生能源進行科學分配,另一方面要大力發展新能源發電技術。以燃煤發電為主,結合風電、水電、核電、太陽能發電和垃圾發電等各種新能源發電技術,實現穩中求進的電力資源整合發展。各種新能源發電技術存在各自制約,水電、風電受地域影響較大;太陽能發電與垃圾發電的轉換效率較低,無法形成大規模穩定供電;核電發展前景較好,但無法普遍應用。我國東北區域屬溫帶大陸性季風氣候,具有天然的風力發電地理優勢。近年來,隨著大量風力發電在東北區域新建,風力發電技術日益成熟,可以承擔一部分發電工作,但受風力風量不穩定的影響,大量風力發電的介入對電網頻率穩定造成了不小沖擊。
在此情況下,為保持電網頻率穩定,需要燃煤機組具備更快響應速度,提高機組調頻調峰能力。國家電力監管委員會東北監管局詳細分析了東北區域電力運行存在的問題,頒布了《東北區域發電廠并網運行管理實施細則》和《東北區域并網發電廠輔助服務管理實施細則》[1]。
“兩個細則”規范了東北區域的電力調度行為,對電網涉網參數考核設置了標準,同時也提高了發電企業參與輔助服務的積極性。對燃煤機組涉網安全方面提出新要求,現在大容量、高參數的燃煤機組存在的普遍問題是一次調頻頻繁動作時,AGC考核指標會受到影響,尤其是對AGC的響應時間影響最為嚴重。
2 原因分析
“前饋+反饋”的一次調頻控制策略被目前大多數電廠采用。一次調頻動作特點是快速性、穩定性、準確性[2],其中為了保證“兩個細則”中“調整幅度偏差β3”的考核要求,一次調頻需要在協調側增加頻差對應的一次調頻函數,該函數作用是保證調速側前饋作用工作時,汽輪機主控的PID不會將一次調頻的負荷變化當作擾動消除。一次調頻功能原理如圖1所示。
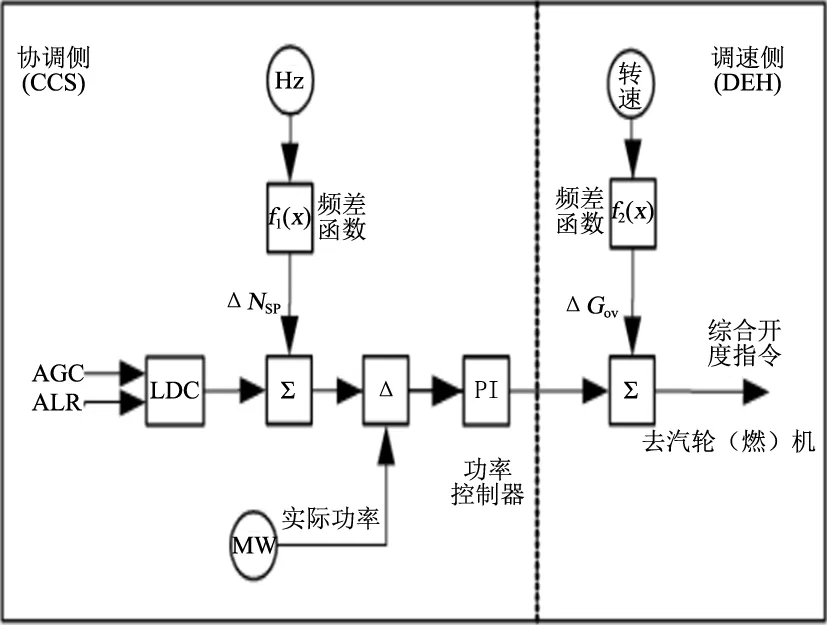
圖1 一次調頻功能原理
一次調頻的考核時間最大為1 min,當一次調頻動作超過1 min后,一次調頻不參與電網考核,同時一次調頻如果與AGC動作的方向相反,就會影響到AGC響應時間的考核[3]。
為了解決一次調頻對AGC響應時間的影響,常規方法是在進入汽輪機主控的負荷指令中增加1路AGC負荷增量前饋。實現的功能為當一次調頻動作持續超過65 s后,機組AGC負荷指令減去當前一次調頻對應的負荷值[4]。具體邏輯如圖2所示。
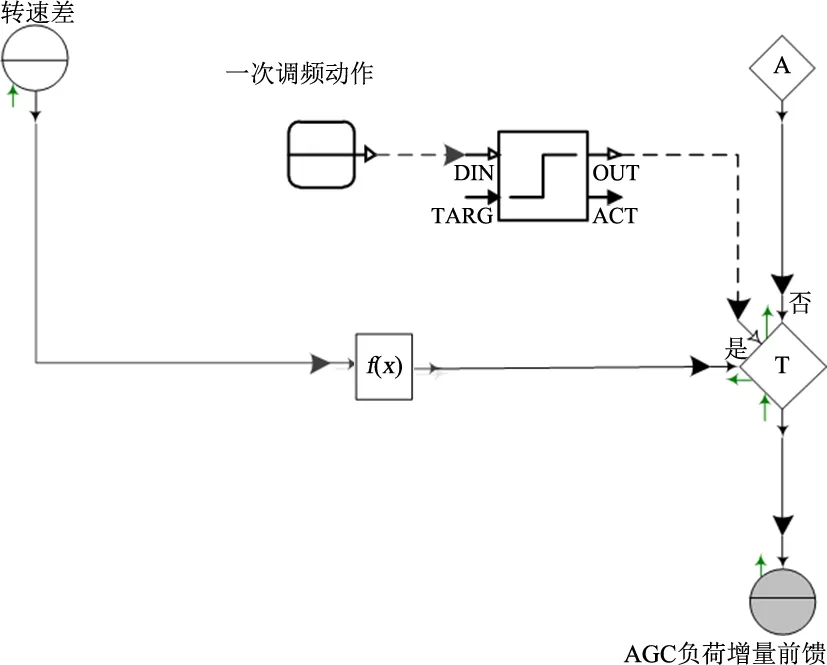
圖2 AGC負荷增量前饋邏輯
加入該邏輯后,AGC響應時間考核問題有所改善,但經常出現負荷反調的問題。分析一次調頻與AGC的動作方向可知,一共有以下4種情況。
a.當一次調頻為負值時,AGC指令發出降負荷指令,此時實際負荷變化趨勢為先上升再下降(同向)。
b.當一次調頻為負值時,AGC指令發出升負荷指令,此時實際負荷變化趨勢為上升(反向)。
c.當一次調頻為正值時,AGC指令發出降負荷指令,此時實際負荷變化趨勢為下降(反向)。
d.當一次調頻為正值時,AGC指令發出升負荷指令,此時實際負荷變化趨勢為先下降再上升(同向)。
由4種情況可知,當一次調頻與AGC的動作方向相反時,實際負荷變化趨勢正常;當一次調頻與AGC的動作方向相同時,實際負荷變化趨勢為先反向調節再正向調節,造成AGC響應時間考核不合格。
汽輪機主控PID的負荷指令構成[5]如下:①AGC指令經上下限幅、速率限制后得到機組負荷指令LDCOUT;②一次調頻理論負荷值;③AGC負荷增量前饋;④壓力拉回邏輯。
以一次調頻為負值,AGC降負荷的工況為例,暫時不考慮壓力拉回邏輯。穩態時,AGC負荷增量前饋為零,實際負荷為LDCOUT與一次調頻理論負荷值的和;降負荷發生后,AGC負荷增量前饋將一次調頻的理論負荷值抵消,實際負荷則趨于LDCOUT,因此出現負荷先升后降的現象。
3 解決方案
當AGC動作時,在負荷指令上增加AGC負荷增量前饋將一次調頻理論負荷抵消的方法并不能保證AGC響應時間的考核,所以需要對AGC負荷增量前饋邏輯進行優化。當一次調頻與AGC的動作方向相反時負荷變化趨勢正常,所以該部分邏輯功能保留;當一次調頻與AGC的動作方向相同時,負荷變化趨勢無法滿足AGC響應時間考核,該邏輯刪除。解決該問題的關鍵是根據一次調頻與AGC的動作方向詳細劃分不同工況,針對同向與反向的不同工況設計不同的控制策略[6]。具體邏輯如圖3所示。首先通過轉速差的變化趨勢確定此時一次調頻的動作方向,轉速差由額定轉速與實際轉速相減得到。用轉速差與其1 s前的轉速差(通過延時模塊得到)進行比較,當輸出大于0時,此時一次調頻是升負荷。以實際轉速由3005 r/min變化到3003 r/min為例,轉速差由-5 r/min變化到-3 r/min。轉速差的變化趨勢為-3 r/min與-5 r/min的差,得到輸出為2,大于0,需要一次調頻升負荷[7];同理,當其輸出值小于0時,此時一次調頻降負荷。其次通過比較不含一次調頻的負荷指令與負荷目標值來確定AGC指令的動作方向,進而得到升負荷狀態與降負荷狀態[8]。
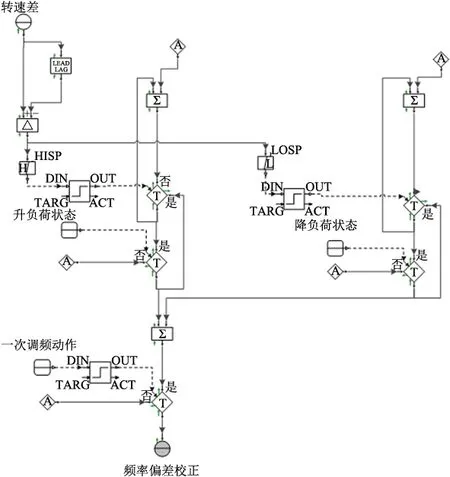
圖3 頻率偏差校正邏輯
當一次調頻動作超過65 s后,一次調頻動作信號未消失,頻率偏差修正邏輯開始起作用,此時機組的考核重點已經由一次調頻優先轉為AGC響應時間考核優先[9]。首先判斷當前負荷狀態為升負荷還是降負荷;然后判斷當前一次調頻的動作方向與AGC負荷指令動作方向是否一致。以升負荷狀態為例,若二者動作方向一致,則保持升負荷狀態下的頻率偏差修正輸出不變;若二者動作方向相反,則在升負荷過程中,一次調頻動作需要實際降負荷,需要對一次調頻理論動作負荷值進行彌補[10],一次調頻理論動作負荷值為頻率偏差修正的輸出。
一次調頻理論負荷值一般由轉速信號經過函數轉換得到。在1 min內轉速變化一般呈劇烈針尖式振蕩曲線型,轉速在極短的時間內反復振蕩,作用在AGC負荷指令上的頻率偏差修正前饋邏輯無法準確判斷當前輸出的負荷值是否就是一次調頻動作的理論負荷值[11]。同時該邏輯需要進入汽輪機主控PID進行反饋閉環調節,本身存在滯后性。該邏輯主要目的是解決一次調頻與AGC的動作方向相反時保證AGC響應時間的考核[12],當一次調頻與AGC的動作方向相反時,通過延時時間模塊將一次調頻動作升負荷的輸出進行離散取樣。當一次調頻動作方向不變的持續時間大于0.5 s時,頻率偏差修正以每個掃描周期累加固定值的方式進行輸出;當一次調頻動作方向不變的持續時間小于0.5 s時,頻率偏差修正輸出不變。
4 結語
本文基于火電燃煤機組的運行特點,針對“兩個細則”制定的關于火電燃煤機組AGC及一次調頻的考核要求,設計了AGC與一次調頻的解耦邏輯,縮短了AGC響應時間,解除了影響機組安全運行的隱患。新的控制策略理念成熟、功能可靠、運行穩定,節能減排效果明顯。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
童話世界(2020年10期)2020-06-15 11:53:22
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
中國衛生(2016年2期)2016-11-12 13:22:24
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
機電信息(2014年27期)2014-02-27 15:53:56