六軸關節型機器人工作性能修復
2023-02-21 03:59:42盧志斌林俊歡
設備管理與維修 2023年1期
盧志斌,林俊歡
(廣州市輕工職業學校,廣東廣州 510663)
1 背景簡介
機器人實訓室有40 臺六軸機器人,使用中發現某些機器人存在關節機械部件運行性能嚴重下降,甚至發生明顯抖動的現象。修復這些實驗設備需要更換機器人機械部件,但是機器人關節部件的價格不是學校可以承受的,必須另辟蹊徑。為修復六軸機器人,研究用空間換性能的方法來延長老舊機器人的工作壽命。
2 空間換性能的基本原理
大多數工業機器人的工作崗位是相對固定的,作業范圍也是固定的。作業范圍對應的關節轉角受力較大,長期運行造成這些位置的關節轉角磨損和變形,導致關節運動故障,本文把這些關節轉角稱為“故障轉角”。在對應非作業位置的其他角度,存在保留原機械性能的關節轉角范圍,本文稱之為“正常轉角”。通過適當的方法找出機器人活動空間中對應正常轉角范圍的區域,把實驗操作安排在這些區域,能夠以最小的代價恢復機器人的工作性能。
根據機器人運動學原理,關節轉角空間(控制空間)與機器人手末位姿空間(任務空間)之間的關系為:
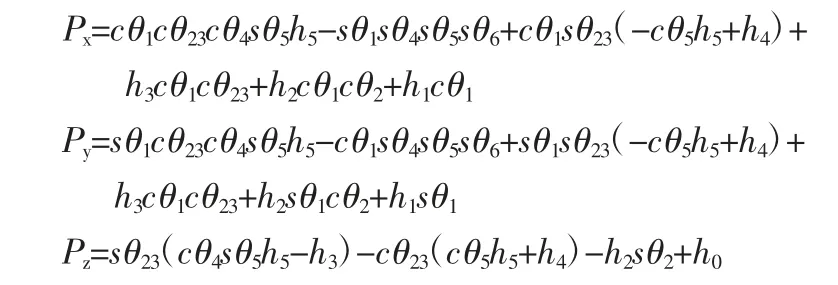
其中,Px、Py、Pz是工具坐標系原點在機器人機座參考系中的坐標,cθi=cosθi,sθi=sinθi,cθij=cos(θi+θj),sθij=sin(θi+θj)。θi是第i 關節轉角。按照上述公式可以建立機器人控制空間與任務空間之間的關系,把關節故障轉角范圍等分為若干間隔,每間隔處用其余所有關節轉角的全范圍畫出手末執行器所占有的位置,這些位置就是受關節故障轉角影響的區域(本文稱之為“隔離區”)。
在同一畫布上畫出手末執行器的活動空間、隔離區和履行工作任務時要進入的區域(簡稱“作業范圍”)的形狀和位置,通過觀察圖形判斷機器人要實現的運動是否進入隔離區。如果機器人作業范圍進入隔離區,采用改變機器人運動構型、移動作業范圍、改變機器人機座安裝位置等措施,使得機器人作業范圍脫離隔離區,機器人工作在正常關節轉角范圍內,達到機器人工作性能修復的目的。
3 軟件工具
“六軸機器人留用、降級或退役篩選”工具軟件適用于大多數六軸關節型機器人,六軸關節型機器人結構如圖1 所示。

圖1 六軸關節型機器人結構
軟件主界面(圖2),共分為5 個區域。區域①用來輸入機器人定義,包括結構參數、運動參數、故障轉角的邊界。區域②用來展示機器人活動空間以及隔離區的位置和形狀。區域②中的功能按鈕分為左右兩列,左邊對應的動點位于機器人手腕點,右邊對應的動點位于機器人執行器上的工具坐標原點。區域③和區域④用來輸入機器人作業范圍或軌跡,展示隔離區與機器人作業范圍或軌跡、機器人活動空間之間的位置關系。所不同的是區域③對應的動點位于工具坐標原點,區域④對應的動點位于機器人手腕點。利用區域③提供的功能得到圖3,顯示在通過第1 關節軸線的平面上,機器人執行器工具坐標原點活動空間(點圓圖形所示)、隔離區(實體陰影部分)、作業范圍(粗實線正方形范圍)之間的位置關系。
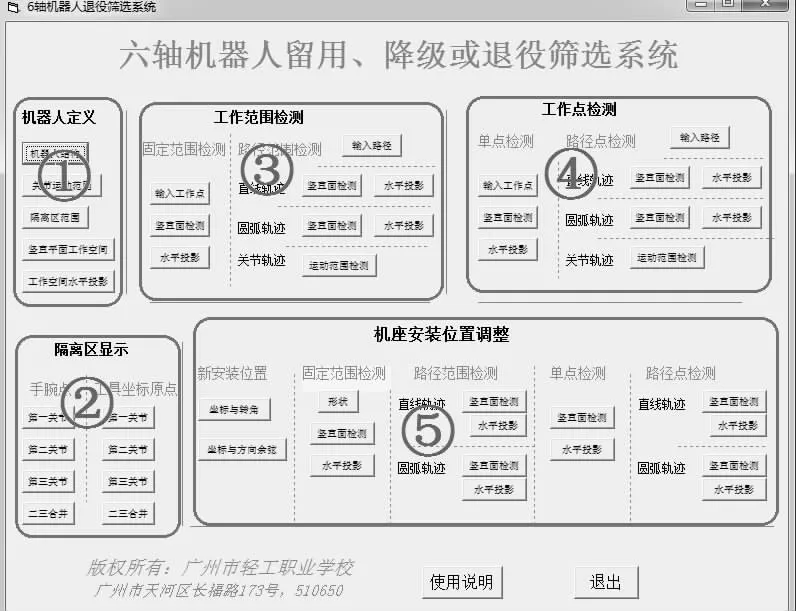
圖2 工具軟件主界面
從圖3 可以看到,機器人作業范圍進入了隔離區,受關節故障轉角的影響。移動作業范圍至細實線位置可以避開隔離區,機器人運動性能將不受影響。在實際使用中,不是所有作業范圍的位置都可以移動的,此時可以利用區域⑤的功能,通過改變機器人機座安裝的位置和方向來改變隔離區的位置,使得機器人工作在正常轉角范圍。

圖3 移動作業范圍避開隔離區
區域⑤包含5 列,左邊第1 列用來輸入新的機器人安裝位置。機器人安裝位置采用固定坐標系描述(圖1)。固定坐標系的Z 軸與原安裝位置機器人第1 關節軸線重合,向上為正方向;X 軸與Z 軸垂直相交,與原安裝位置上第1 關節轉角為零的基準位置一致,從Z 軸指向第2 關節中心為正方向;Y 軸符合右手定則。
新的安裝位置可以通過兩種方式輸入,一是點擊“坐標與轉角”按鈕,輸入新的安裝位置沿固定坐標系X、Y、Z 方向上移動的距離,以及繞固定坐標系某軸旋轉的角度。二是點擊“坐標與方向余弦”按鈕,輸入新安裝位置沿固定坐標系X、Y、Z 方向上移動的距離,以及新位置上機器人坐標系的方向余弦。
區域⑤左邊第2 列用來輸入機器人的作業范圍,對應工具坐標原點;展示在新的安裝位置上機器人的活動范圍、隔離區、作業范圍之間的位置關系。區域⑤左邊第3 列用來輸入機器人的工作軌跡,對應工具坐標原點;展示在新安裝位置上機器人的活動范圍、隔離區、工作軌跡之間的位置關系。區域⑤右邊兩列對應手腕點,功能與左邊第2、第3 列類似。
4 機器人運動性能修復案例
4.1 受檢機器人參數
實驗室某臺機器人的結構參數見表1,運動參數見表2。故障角度位于第2 關節30°~45°,如圖4 所示。受檢機器人執行器上工具坐標原點的作業范圍位于通過關節1 軸線的平面上,L=650 mm,H=370 mm。該作業范圍呈傾斜姿態,A 點到第1 關節軸線的水平距離820 mm,B 點到第1 關節軸線的水平距離1050 mm。

表1 機器人結構參數 mm
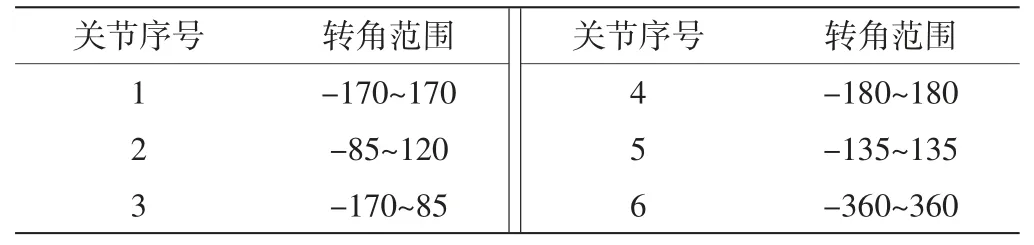
表2 機器人關節轉動范圍 °
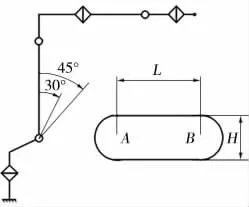
圖4 故障角度邊界和作業范圍形狀
4.2 確定隔離區與作業范圍的位置關系
運行軟件,在主界面區域①輸入受檢機器人結構參數、運動參數和關節故障轉角邊界。在主界面區域③輸入作業范圍,屏幕顯示通過第1 關節的平面上機器人的運動空間(圖5)。圖中實體陰影部分是機器人運動空間中對應第2 關節故障轉角的隔離區,粗實線表示機器人作業范圍,該范圍與隔離區發生干涉。
4.3 確定修復策略
當機器人作業范圍與隔離區發生干涉,在操作工藝允許的條件下,可以嘗試通過改變執行器相對工件的接近角來改變機器人桿件的構形,或移動機器人作業范圍來避開隔離區。經分析,本案例不具備這些條件,決定采取改變機器人機座安裝位置的方法進行修復。
4.4 機器人工作性能修復
利用主界面區域⑤提供的功能,經幾次嘗試,最后采用的方案是:機器人機座原地繞Z 軸轉180°并升高150 mm 安裝,如圖5 所示(b=150 mm)。調整機座后,隔離區的位置發生變化,解除了與機器人作業范圍的干涉,機器人工作性能修復。

圖5 機器人運動性能修復
5 結束語
我國是機器人使用大國,隨著時間的推移,將迎來大量機器人進入降級使用或報廢的階段,需要有應對的措施。本文介紹的方法能在不增加費用的情況下延長機器人的工作壽命,有利于實現機器人全壽命周期的利潤最大化,也為機器人降級使用或報廢政策的制定提供了一種定量評價方法。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
汽車維修與保養(2019年7期)2020-01-06 03:30:42
故事大王(2016年7期)2016-09-22 17:30:08
汽車維護與修理(2016年10期)2016-07-10 08:17:41
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
汽車維修與保養(2015年6期)2015-04-17 03:31:50
電測與儀表(2015年5期)2015-04-09 11:30:52
汽車維護與修理(2015年2期)2015-02-28 12:15:39
兒童故事畫報(2013年3期)2013-06-24 05:40:30
