基于三維激光掃描的高精度大壩變形監測技術研究
2023-02-15 13:46:58范泯進朱燕梅張宏達茍家強
水利技術監督 2023年1期
關鍵詞:分析
范泯進,朱燕梅,張宏達,陳 伍,茍家強
(四川中水成勘院工程物探檢測有限公司,四川 成都 610072)
大壩在運行過程中受庫區水位和其他地質因素影響,大壩壩體可能在沿著壩軸線或垂直壩軸線方向上產生變形,而當此種變形達到一定程度后會危及大壩安全。所以,大壩變形監測是貫穿于水電站建設、運行全壽命周期的重要工作內容。目前在大壩變形監測中常用的人工變形監測系統和自動化變形監測系統等,多采用“點”布設方式在大壩壩體或廊道內局部斷面安裝監測設施。這種布設方式下監測斷面間距一般較大,所采集的形變數據也集中在斷面附近,不能全面、連續、完整反映大壩形變情況。這些監測中的“盲點”區域,在水電站的整體平穩運行中存在一定安全隱患。
隨著測繪技術的飛速發展,高精度三維激光掃描技術運用到大壩安全監測中。該監測技術可在有效測程范圍內提供高密度、高精度點云數據,構建三維模型數據場,能夠全面準確的反映大壩壩體的形變、裂縫發育、表面破損等細節信息。并以“全方位、無死角”的方式記錄下大壩各個部位、在各個時期的運行狀態;以“三維變形監測、三維實景記錄”的方式在高精度下記錄大壩廊道內“可見”和“不可見”信息,形成詳細完整的大壩運行健康檔案。
1 三維激光掃描技術
三維激光掃描技術主要通過三維激光發射器發出激光脈沖信號,以基于“面”的數據采集方式和亞毫米級測距精度,采集有效測程范圍內掃描目標體的高密度、高精度點云數據。此外,可以通過同步影像采集系統,獲取掃描目標體的“實景三維影像”信息。
通過后處理軟件,對掃描獲得的點云數據和影像數據進行處理轉換,建構掃描體高精度、高密度的點云模型數據場。
2 數據采集與處理技術
2.1 點云徑向密度去噪法
在水工隧洞和平面三維激光掃描中,由于激光掃描儀采用360度相位法方式掃描,在水、鏡面等高反射率掃描面影響下將不可避免會產生噪點,而這些噪點的去除卻十分繁瑣,將耗費大量人力。因此,根據水工隧洞和混凝土結構面的特點,將其按幾何結構進行軸向和徑向微元劃分,并通過對點密度和徑向位移偏差分析,確定閾值進行去噪。
當掃描面處在掃描儀的最優掃描位時,將會形成高密度點云,而噪點分布則呈現零散、低密等特征。通過設置合適的斷面角度微元徑向點云噪點去除閾值,可以獲得清晰完整的洞壁點云。如圖1所示,隧洞局部樁號段采用徑向密度去噪法處理前、后點云。
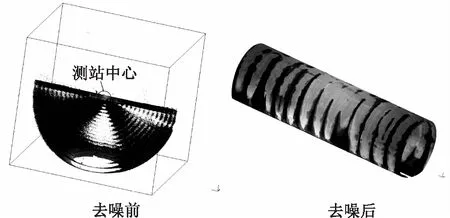
圖1 點云徑向密度去噪法處理前、后洞壁點云圖
2.2 高精度點云縫合技術
三維激光掃描采集的點云數據量大,其單站掃描點數可達上億,反映掃描目標表面信息詳細而準確。然而由于測試表面與掃描儀存在距離差異、以及測試表面激光入射角度差異,將使得測試成果因測試表面多次掃描反射強度差異產生“雪花”點、以及由于掃描遮擋導致產生“漏洞”區域。
針對上述問題,通過研發“高精度點云去噪縫合技術”,采用專有算法充分利用每站掃描獲取的高精度、高清晰數據,逐站進行匹配;并且對于單站掃描時被遮擋的無數據“漏洞”區域,采用多站優勢高精度點云數據進行“漏洞縫合”;最終使得多站整體拼合圖像清晰、細節特征明顯,真正實現“實景還原”,不同掃描點云處理技術成果對比見表1。
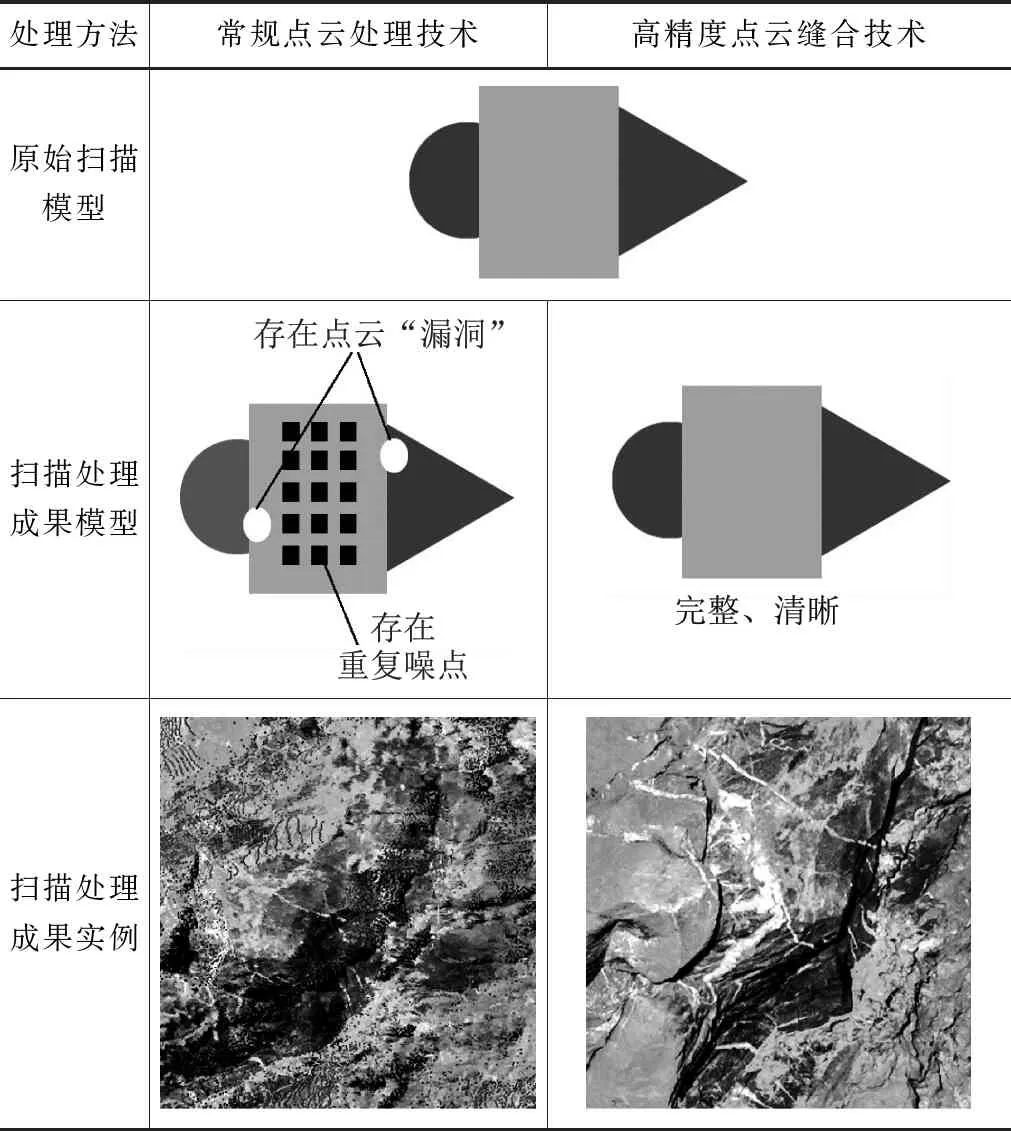
表1 不同掃描點云處理技術成果對比圖表
2.3 改進的高精度形變分析算法
三維激光掃描的點云密度大、精度高,將三維點云數據場與設計模型或多期掃描數據進行計算分析,可反映掃描目標體的表面缺陷、位移、形變等情況,如圖2所示。形變分析精度受點云精度和密度、環境噪點以及分析算法的影響,會存在一定的系統誤差,該誤差如果得不到有效控制或消除,會導致微小形變得不到反映或放大整體形變。通過分析水工隧洞實際結構特征,在國內外常用形變量分析方法的基礎上采用改進的高精度形變量計算方法,實現形變量毫米級高精度提取分析。算法流程如圖3所示。
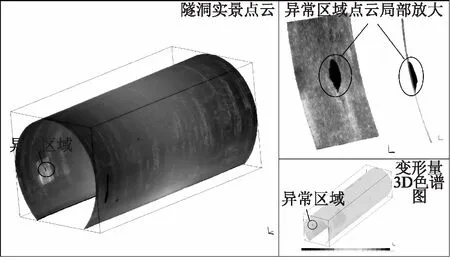
圖2 三維激光隧洞形變分析成果展示圖
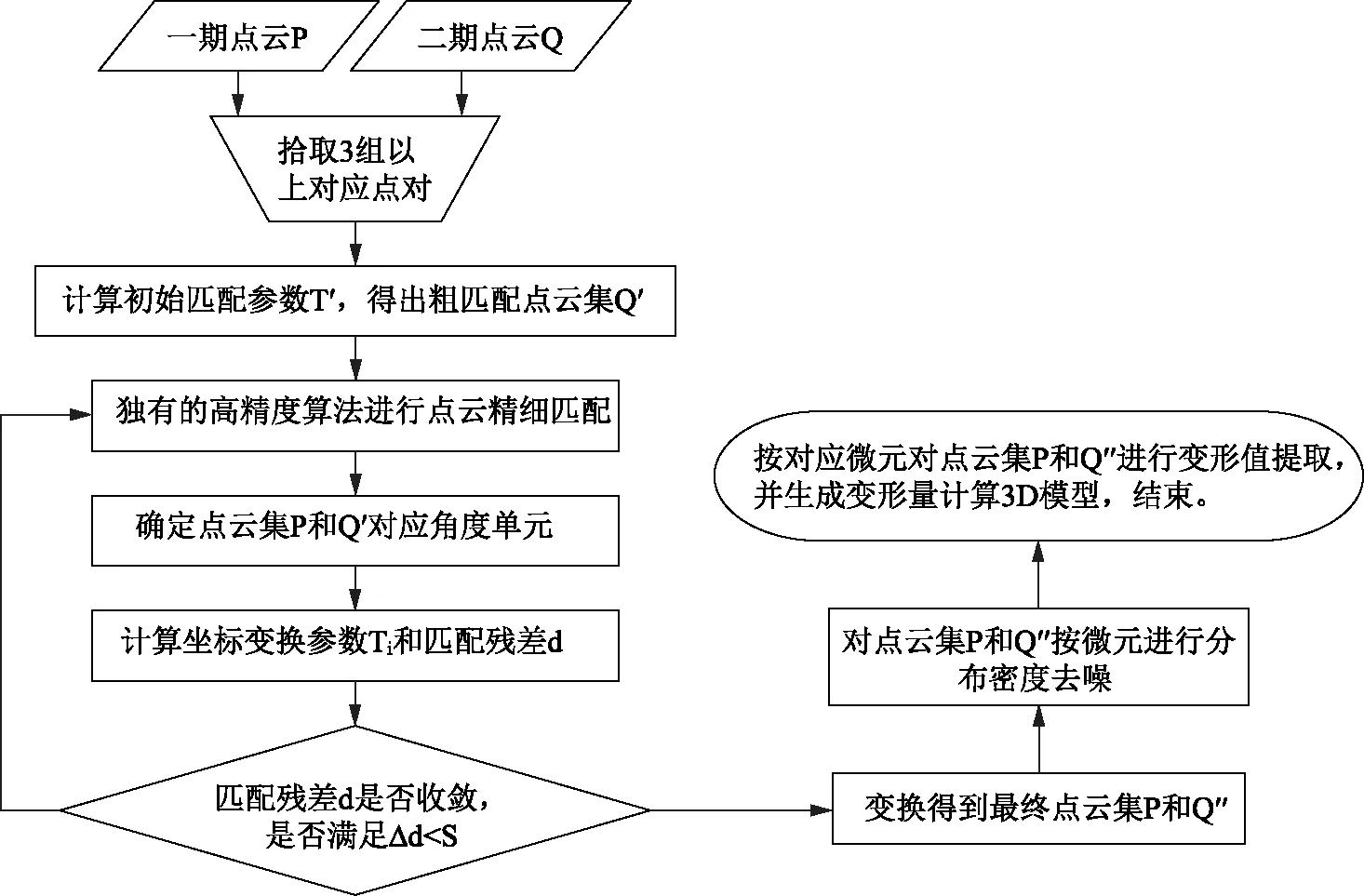
圖3 隧洞形變分析算法流程圖
3 三維激光掃描技術在大壩監測中的應用
3.1 測試情況簡述
某大型水電站是控制性“龍頭”梯級電站。通過在該水電站大壩1829m高程廊道分兩期采用高精度三維激光掃描技術,監測在庫水位1801m高程和1878m高程時大壩壩體整體形變情況。
3.2 現場布置與數據采集
3.2.1控制測量
通過與壩體控制點聯測,并在各高程大壩廊道布置三維激光掃描測量控制點和測量控制點。其中,測量控制點布設置于洞內底板,掃描控制點采用專用靶球棱鏡布設于洞內邊墻。
3.2.2三維激光掃描現場布置
根據大壩廊道結構特征,三維激光掃描以4m間距布置測站,并同時采用高精度靶球棱鏡、靶球與控制測量相結合方式進行掃描。大壩廊道1829m高程三維激光掃描均自左岸起始向右岸方向進行;現場測站布置間距4m(局部加密,如觀測間內等),以滾動方式沿測線推進掃描。
3.3 三維激光掃描分析成果
大壩廊道三維激光掃描基準數據庫以三維點云數據為基礎,涵蓋洞身整體三維坐標信息、激光影像圖、裂縫發育情況等信息。
配準完成后的隧洞整體點云數據將統一到參考坐標系,隧洞點云將被賦予準確的三維坐標信息。根據點云數據可查詢隧洞中任意點的三維坐標、任意兩點間的距離等信息,可提取隧道任意間距的斷面信息等。
3.3.1三維激光掃描實景點云成果圖
通過三維激光掃描儀得到的洞壁外觀表面具有三維坐標信息的點數據集合稱為點云。經對各測站采集數據進行配準,點云去噪、“漏洞”縫合等處理后,最終得到大壩廊道全洞段三維點云數據。通過將點云與全景高分辨率彩色全景影像數據相融合,得到大壩廊道三維實景點云模型成果,如圖4所示。
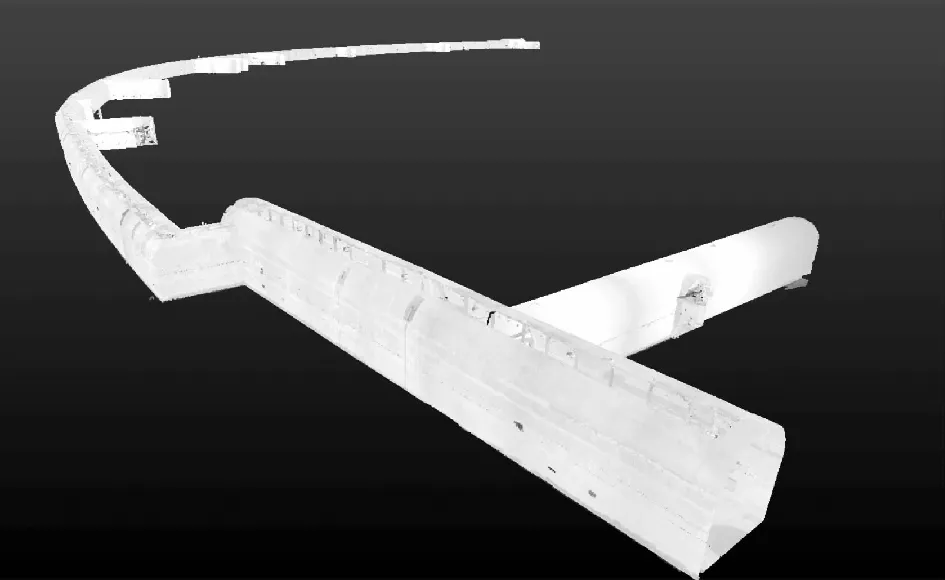
圖4 1829m高程大壩廊道整體實景點云展示圖
3.3.2三維激光掃描灰度點云成果圖
以每測站三維激光掃描儀位置為球心,通過軟件將該測站三維激光掃描所得的點云數據投影到一個球形的展開圖中,并且將洞壁對激光的反射率以不同的灰度等級表示,即可生成該測站三維激光掃描的灰度全景圖。混凝土表面當有裂縫、掉塊、蜂窩麻面等缺陷時,會出現激光反射強度差異,缺陷將呈現區別于完整混凝土的表觀特征。通過自動識別掃描數據中激光反射率強度特征和不同缺陷的表觀特征,對洞壁混凝土裂縫進行自動提取,然后進行人工校核。
3.3.3形變位移量分析
三維激光掃描數據中每個三維點均有一個特定的坐標,從每個點的坐標計算可得點與點之間的距離,根據點云坐標可知大壩廊道內側表面體型信息;此外,通過在遠端山體內布置多個參考不動點,對在不同水位高度情況下采集大壩廊道點云數據進行分布校準,然后對同一樁號位置的洞壁點云數據進行精確匹配、對比分析、計算可獲得大壩廊道在不同水位高程下各區域位移情況。通過解譯不同高程廊道在不同水位情況下3D位移量成果,可分析大壩在三維空間中不同高程、不同區域受力形變情況及趨勢。
為便于分析和直觀了解拱壩形態,建立以拱壩中心線走向為參考坐標軸的三維空間坐標系統,該坐標系以高程方向為“Z軸”,以朝向高海拔方向為+、以朝向低海拔方向為-;以拱壩中心線為“Y軸”,以朝向下游方向為+、以朝向上游方向為-;以垂直拱壩中心線為“X軸”,以朝向左岸方向為+、以朝向右岸方向為-。三維激光掃描分析“壩拱中心線坐標系統”示意如圖5所示。
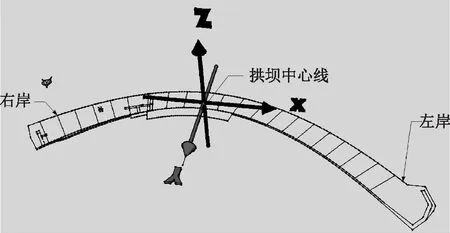
圖5 三維激光掃描分析“壩拱中心線坐標系統”示意圖
大壩1829m高程廊道內布置掃描測試控制點9個,該控制點同時采用三維激光掃描儀與全站儀進行掃描測試。此外,對整條廊道同步進行三維激光掃描測試,通過現場掃描和數據處理、分析,獲得了大壩1829m高程廊道在不同水位下三維空間形態點云成果、以及其在不同水位情況下位移情況。
如圖6所示,通過將大壩1829m高程PL05-2~PL19-2垂線觀測系統觀測數據投影到“壩拱中心線坐標系統”中,其位移量表現為:沿Y軸向位移量處于14~37mm之間;X軸向位移量處于-4~2mm之間,其中壩拱中心線至左岸壩基之間呈負值,壩拱中心線至右岸壩基之間呈正值。
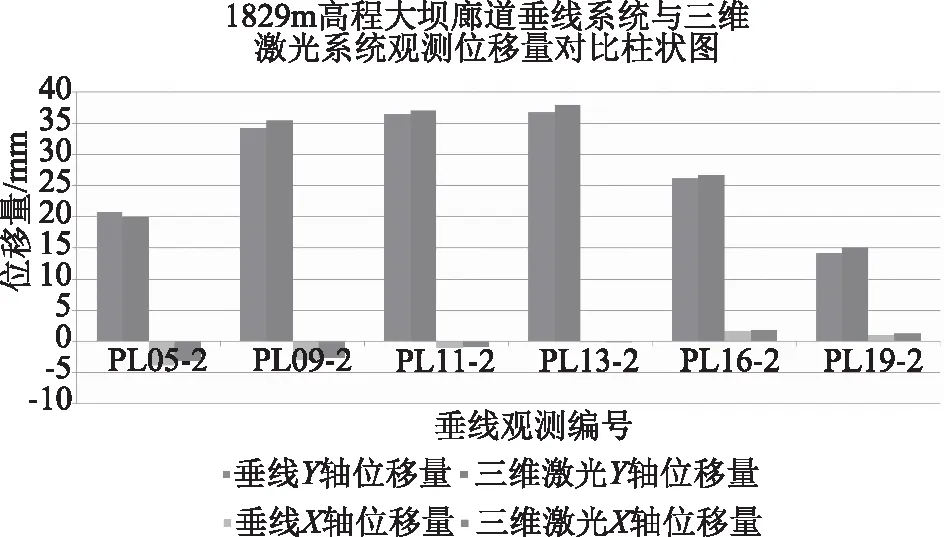
圖6 1829m高程大壩廊道垂線系統與三維激光系統觀測位移量對比柱狀圖
而通過對三維激光觀測系統掃描所得PL05-2~PL19-2觀測間點云成果進行位移分析,各觀測間位移量表現為:沿Y軸向位移量處于15~38mm之間;X軸向位移量處于-4~2mm之間;其中壩拱中心線至左岸壩基之間呈負值,壩拱中心線至右岸壩基之間呈正值,與垂線觀測系統整體趨勢較一致。
4 結語
三維激光掃描技術已具有較高的測距精度和點云密度,運用在大壩形變監測中可以獲得連續、完整、豐富的監測信息。同時,本文通過研發點云徑向密度去噪法、高精度點云縫合技術、改進的高精度變形分析算法等,構建了基于三維點云場景的水電站大壩變形監測高精度數據處理方法,實現了大壩變形監測自動識別與智能分析,可以為水工建筑物全壽命周期的安全監測提供科學、有效支撐。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06