基于多維度特征融合的云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)方法
2023-01-16 07:35:56李慧芳黃姜杭徐光浩夏元清
自動(dòng)化學(xué)報(bào) 2023年1期
李慧芳 黃姜杭 徐光浩 夏元清
云資源的按使用付費(fèi)模式以及彈性擴(kuò)展能力,為大規(guī)模科學(xué)應(yīng)用的分布式管理與高效執(zhí)行提供了快速、靈活、可擴(kuò)展的部署環(huán)境[1-3].科學(xué)應(yīng)用的分布式管理與高效執(zhí)行的關(guān)鍵在于工作流調(diào)度,而調(diào)度算法的設(shè)計(jì)、調(diào)度性能的優(yōu)劣以及調(diào)度方案的可實(shí)施性,直接取決于任務(wù)執(zhí)行時(shí)間的估計(jì)精度[4-5].
在實(shí)際云數(shù)據(jù)中心環(huán)境下,大量、頻繁的用戶(hù)服務(wù)請(qǐng)求與響應(yīng),使數(shù)據(jù)中心的運(yùn)行數(shù)據(jù)規(guī)模呈指數(shù)級(jí)增長(zhǎng).其中,工作流執(zhí)行日志數(shù)據(jù)包含了大量的任務(wù)執(zhí)行時(shí)間歷史及其相關(guān)影響因素?cái)?shù)據(jù),并在數(shù)據(jù)驅(qū)動(dòng)的任務(wù)執(zhí)行時(shí)間預(yù)測(cè)中發(fā)揮著重要作用.任務(wù)執(zhí)行時(shí)間的影響因素?cái)?shù)據(jù),可根據(jù)其特征劃分為類(lèi)別型數(shù)據(jù)和數(shù)值型數(shù)據(jù).類(lèi)別型數(shù)據(jù)與任務(wù)和資源的多樣性、異構(gòu)性相關(guān),其數(shù)值離散且取值范圍廣,如任務(wù)名稱(chēng)和機(jī)器ID 等;數(shù)值型數(shù)據(jù)則與云環(huán)境的動(dòng)態(tài)特性相關(guān),其數(shù)值連續(xù),且在一定范圍內(nèi)波動(dòng),如資源利用率和網(wǎng)絡(luò)帶寬等.在大數(shù)據(jù)環(huán)境下,類(lèi)別型數(shù)據(jù)的高維稀疏特性會(huì)擴(kuò)大模型的搜索空間,數(shù)值型數(shù)據(jù)的低維稠密特性會(huì)降低部分特征之間的差異性,從而加大了模型尋優(yōu)和學(xué)習(xí)的難度,給任務(wù)執(zhí)行時(shí)間預(yù)測(cè)帶來(lái)了巨大挑戰(zhàn)[6].
本文提出了一種基于多維度特征融合(Multidimensional feature fusion,MDFF)的云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)算法.針對(duì)類(lèi)別型數(shù)據(jù)和數(shù)值型數(shù)據(jù)的特點(diǎn),設(shè)計(jì)不同的特征提取方法,分別提取類(lèi)別型和數(shù)值型特征.同時(shí),通過(guò)將提取的特征和原始數(shù)據(jù)特征進(jìn)行有選擇地融合,并采用輕量梯度提升機(jī)算法對(duì)融合特征進(jìn)行挖掘與利用,實(shí)現(xiàn)云工作流任務(wù)執(zhí)行時(shí)間的精準(zhǔn)預(yù)測(cè).
本文的主要貢獻(xiàn)如下:
1)構(gòu)建具有注意力機(jī)制的堆疊殘差循環(huán)網(wǎng)絡(luò),將類(lèi)別型數(shù)據(jù)從高維稀疏空間映射到低維稠密空間,通過(guò)減小搜索空間,提升模型對(duì)類(lèi)別型數(shù)據(jù)的解析能力,同時(shí)增強(qiáng)模型對(duì)類(lèi)別型特征的關(guān)注度,以有效提取類(lèi)別型特征,提高預(yù)測(cè)精度.
2)引入極限梯度提升算法,對(duì)數(shù)值型數(shù)據(jù)進(jìn)行離散化編碼,通過(guò)將過(guò)于稠密的數(shù)值型數(shù)據(jù)稀疏化,突出特征之間的差異性,避免模型訓(xùn)練陷入局部最優(yōu)的可能,提升模型的非線性信息表達(dá)能力,有效提取數(shù)值型特征,改善預(yù)測(cè)精度.
3)設(shè)計(jì)多維異質(zhì)特征融合策略,將具有注意力機(jī)制的堆疊殘差循環(huán)網(wǎng)絡(luò)提取的類(lèi)別型特征、極限梯度提升(Extreme gradient boosting,XGB)模型提取的數(shù)值型特征與原始樣本數(shù)據(jù)進(jìn)行選擇性融合,以充分挖掘與利用任務(wù)執(zhí)行時(shí)間的多維度特征,學(xué)習(xí)更全面的任務(wù)執(zhí)行時(shí)間知識(shí),降低預(yù)測(cè)誤差.
1 研究現(xiàn)狀
傳統(tǒng)的云計(jì)算任務(wù)執(zhí)行時(shí)間估計(jì)方法,大多基于微分測(cè)量[7]、相似性分析[8-9]以及數(shù)學(xué)表達(dá)式[10-11]等統(tǒng)計(jì)學(xué)習(xí)算法,忽略了云資源的動(dòng)態(tài)變化以及云環(huán)境的復(fù)雜特性,難以實(shí)現(xiàn)任務(wù)執(zhí)行時(shí)間的準(zhǔn)確估計(jì).隨著機(jī)器學(xué)習(xí)的不斷發(fā)展,數(shù)據(jù)驅(qū)動(dòng)的執(zhí)行時(shí)間預(yù)測(cè)方法被廣泛應(yīng)用于各種云應(yīng)用場(chǎng)景.近年來(lái),研究人員一直在探索如何將各種機(jī)器學(xué)習(xí)算法(如傳統(tǒng)機(jī)器學(xué)習(xí)、深度學(xué)習(xí)與集成學(xué)習(xí)算法)應(yīng)用于云計(jì)算任務(wù)執(zhí)行時(shí)間預(yù)測(cè),以從海量、異構(gòu)、復(fù)雜和多維的工作流任務(wù)執(zhí)行數(shù)據(jù)中挖掘出更有效的信息.
基于傳統(tǒng)機(jī)器學(xué)習(xí)的云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè),大多采用多元線性回歸、支持向量回歸等早期機(jī)器學(xué)習(xí)算法.Nouri 等[12]和Tahvili 等[13]建立了任務(wù)執(zhí)行時(shí)間及其影響因素的多元回歸模型,實(shí)現(xiàn)任務(wù)執(zhí)行時(shí)間的估計(jì).可是,多元線性回歸模型更適合捕捉線性關(guān)系,難以學(xué)習(xí)工作流任務(wù)執(zhí)行時(shí)間及其影響因素之間的非線性關(guān)系.Park 等[14]與鄭婷婷等[15]利用支持向量回歸,進(jìn)行任務(wù)執(zhí)行時(shí)間預(yù)測(cè).但是,支持向量回歸采用二次規(guī)劃計(jì)算支持向量,導(dǎo)致很大的內(nèi)存和時(shí)間開(kāi)銷(xiāo),特別是在大數(shù)據(jù)樣本時(shí),其模型訓(xùn)練時(shí)間過(guò)長(zhǎng).
深度學(xué)習(xí)具有超強(qiáng)的特征映射能力,能夠從海量數(shù)據(jù)中學(xué)習(xí)并挖掘數(shù)據(jù)之間的非線性關(guān)系,為數(shù)據(jù)驅(qū)動(dòng)的任務(wù)執(zhí)行時(shí)間預(yù)測(cè)提供了新思路[16-17].伍章俊等[18]和Nadeem 等[19]采用徑向基函數(shù)(Radial basis function,RBF)神經(jīng)網(wǎng)絡(luò),構(gòu)建了云工作流活動(dòng)執(zhí)行時(shí)間預(yù)測(cè)模型.但是,RBF 網(wǎng)絡(luò)是一種單隱含層的前饋網(wǎng)絡(luò),難以有效學(xué)習(xí)序列數(shù)據(jù)驅(qū)動(dòng)的任務(wù)執(zhí)行時(shí)間變化趨勢(shì)相關(guān)的知識(shí),不適用于云環(huán)境下的任務(wù)執(zhí)行時(shí)間預(yù)測(cè).因此,Rehse 等[20]引入循環(huán)神經(jīng)網(wǎng)絡(luò)(Recurrent neural network,RNN),通過(guò)捕捉任務(wù)執(zhí)行時(shí)間的變化趨勢(shì)來(lái)進(jìn)行任務(wù)運(yùn)行時(shí)間預(yù)測(cè).Zhu 等[21]提出了基于長(zhǎng)短時(shí)記憶網(wǎng)絡(luò)(Long short-term memory,LSTM)的預(yù)測(cè)方法,解決RNN 因梯度爆炸/消失而引起的預(yù)測(cè)精度降低問(wèn)題.Bi 等[22]選擇Savitzky-Golay 濾波器,濾除原始數(shù)據(jù)序列的極值點(diǎn)和噪聲干擾,并利用LSTM 進(jìn)行任務(wù)執(zhí)行時(shí)間預(yù)測(cè).
神經(jīng)網(wǎng)絡(luò)(Neural network,NN)強(qiáng)大的非線性擬合能力和大數(shù)據(jù)學(xué)習(xí)能力,使基于深度學(xué)習(xí)的任務(wù)執(zhí)行時(shí)間預(yù)測(cè)效果得到了明顯改善,但是,NN固有的層級(jí)連接結(jié)構(gòu)和大量神經(jīng)元計(jì)算,不僅使優(yōu)化超平面變得十分復(fù)雜,也大大增加了模型尋優(yōu)的難度,從而影響預(yù)測(cè)精度.此外,這些研究工作大多基于單一機(jī)器學(xué)習(xí)算法,即使特征空間包含非常有效的信息,但是單一模型有限的學(xué)習(xí)能力,很難找到最優(yōu)解,直接影響預(yù)測(cè)精度[23].
集成學(xué)習(xí)可以綜合相同/不同模型的學(xué)習(xí)能力,為云計(jì)算任務(wù)執(zhí)行時(shí)間預(yù)測(cè)開(kāi)辟了新的途徑.一些學(xué)者將多個(gè)單一模型有機(jī)結(jié)合,通過(guò)不同模型的優(yōu)勢(shì)互補(bǔ)來(lái)增強(qiáng)集成模型的學(xué)習(xí)能力,并減少預(yù)測(cè)誤差.鄭顧平等[24]綜合線性、非線性和多項(xiàng)式回歸等擬合技術(shù),搭建了基于參數(shù)變化的云應(yīng)用程序執(zhí)行時(shí)間預(yù)估模型.類(lèi)似地,李帥標(biāo)等[25]將樸素貝葉斯、支持向量回歸和LSTM 有機(jī)結(jié)合,通過(guò)Stacking策略進(jìn)行模型融合,提出了一種業(yè)務(wù)過(guò)程剩余時(shí)間預(yù)測(cè)算法.Nadeem 等[26]通過(guò)集成局部學(xué)習(xí)和進(jìn)化計(jì)算,實(shí)現(xiàn)了對(duì)e-Science 工作流執(zhí)行時(shí)間的預(yù)測(cè).Hilman 等[27]基于LSTM和K 最近鄰技術(shù),設(shè)計(jì)了在線增量學(xué)習(xí)方法,用于工作流任務(wù)運(yùn)行時(shí)間預(yù)測(cè).Gao 等[28]采用基于受限玻爾茲曼機(jī)(Restricted Boltzmann machine,RBM)堆疊的深度置信網(wǎng)絡(luò)(Deep belief network,DBN),建立了并發(fā)請(qǐng)求云服務(wù)響應(yīng)時(shí)間與虛擬機(jī)資源之間的映射模型.Pham等[29]提出了基于隨機(jī)森林(Random forest,RF)的兩階段預(yù)測(cè)算法,實(shí)現(xiàn)對(duì)云工作流任務(wù)執(zhí)行時(shí)間的估計(jì).實(shí)踐證明,在大多數(shù)情況下,集成方法的預(yù)測(cè)精度優(yōu)于單一機(jī)器學(xué)習(xí)算法.因此,本文利用集成學(xué)習(xí)方法解決大數(shù)據(jù)驅(qū)動(dòng)的云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)問(wèn)題.
集成學(xué)習(xí)在大數(shù)據(jù)驅(qū)動(dòng)的云計(jì)算任務(wù)執(zhí)行時(shí)間預(yù)測(cè)方面取得了一定效果,但它們大多基于仿真數(shù)據(jù),且仿真環(huán)境難以模擬云環(huán)境下資源的動(dòng)態(tài)接入、撤離以及網(wǎng)絡(luò)的不穩(wěn)定性.因此,仿真數(shù)據(jù)給出的離散型或者連續(xù)型任務(wù)執(zhí)行時(shí)間的影響因素?cái)?shù)據(jù),其取值都在一定范圍內(nèi),使得類(lèi)別型數(shù)據(jù)和數(shù)值型數(shù)據(jù)難以區(qū)分.也就是說(shuō),仿真數(shù)據(jù)與實(shí)際云數(shù)據(jù)中心環(huán)境下的工作流執(zhí)行日志數(shù)據(jù)存在很大差異.然而,現(xiàn)有采用仿真數(shù)據(jù)的集成學(xué)習(xí)方法往往忽略了這種差異性,在對(duì)類(lèi)別型和數(shù)值型數(shù)據(jù)進(jìn)行相似處理的基礎(chǔ)上,進(jìn)行云計(jì)算任務(wù)執(zhí)行時(shí)間預(yù)測(cè).現(xiàn)有的集成學(xué)習(xí)方法存在以下問(wèn)題:1)對(duì)類(lèi)別型數(shù)據(jù)的解析能力不足,即類(lèi)別型數(shù)據(jù)的高維稀疏特性使搜索空間過(guò)大,模型很難找到最優(yōu)解,從而影響預(yù)測(cè)精度;2)缺乏足夠的非線性表達(dá)能力,且模型學(xué)習(xí)困難、易于陷入局部最優(yōu),難以應(yīng)對(duì)數(shù)值型數(shù)據(jù)的低維稠密特性所帶來(lái)的特征差異性降低問(wèn)題,影響預(yù)測(cè)效果;3)直接對(duì)提取到的特征進(jìn)行學(xué)習(xí),導(dǎo)致學(xué)習(xí)效率低甚至學(xué)到無(wú)效或錯(cuò)誤信息,影響預(yù)測(cè)結(jié)果的準(zhǔn)確性.
2 相關(guān)理論基礎(chǔ)
本節(jié)介紹本文算法涉及的主要理論基礎(chǔ),即XGB算法[30]和輕量梯度提升機(jī)(Light gradient boosting machine,LGBM)算法[31].
2.1 極限梯度提升算法
作為梯度提升機(jī)(Gradient boosting machine,GBM)的一種高效實(shí)現(xiàn),XGB 利用梯度提升技術(shù),通過(guò)迭代生成殘差下降的決策樹(shù)(即基學(xué)習(xí)器),將低精度的基學(xué)習(xí)器組合成一個(gè)較高精度的強(qiáng)學(xué)習(xí)器,并利用正則化和二階泰勒展開(kāi)防止過(guò)擬合,提高了模型的泛化能力.因此,XGB 模型能獲得較好且不同的特征表達(dá),適合處理取值范圍固定、數(shù)值連續(xù)的數(shù)值型數(shù)據(jù).
數(shù)據(jù)集D={(Xi,Yi)}含有n個(gè)樣本和m個(gè)特征,其中Xi為第i個(gè)樣本的輸入向量,Yi為Xi對(duì)應(yīng)的輸出,Yi∈R,i=1,2,···,n.假設(shè)XGB 模型由K棵樹(shù)集成,其預(yù)測(cè)函數(shù)如下:

式中,l為可導(dǎo)凸函數(shù),表示預(yù)測(cè)值和真實(shí)值Yi的差異. Ω (·) 是正則化懲罰項(xiàng),用以避免樹(shù)的結(jié)構(gòu)過(guò)于復(fù)雜、平滑學(xué)習(xí)權(quán)重并緩解過(guò)擬合.
在XGB 模型迭代添加樹(shù)的過(guò)程中,第t次的目標(biāo)函數(shù)可表示為:

2.2 輕量梯度提升機(jī)
LGBM 基于單邊梯度采樣(Gradient-based one-side sampling,GOSS)和互斥特征捆綁技術(shù)(Exclusive feature bundling,EFB),能夠在不損失預(yù)測(cè)精度的情況下加速梯度提升過(guò)程,提高模型訓(xùn)練效率.因此,相比于XGB 模型,LGBM 模型易于擴(kuò)展、訓(xùn)練效率高,更適合處理特征維度高、數(shù)據(jù)量大的數(shù)據(jù),滿(mǎn)足云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)問(wèn)題的需求.
作為一種在保證精度的前提下能減少數(shù)據(jù)量的算法,GOSS 在決策樹(shù)迭代生成過(guò)程中根據(jù)梯度絕對(duì)值對(duì)數(shù)據(jù)進(jìn)行排序,選取前a% 個(gè)樣本,并在剩余的樣本數(shù)據(jù)中隨機(jī)采樣b個(gè)樣本.在計(jì)算信息增益時(shí),通過(guò)對(duì)采樣的小梯度數(shù)據(jù)乘以系數(shù)(1-a)/b,來(lái)緩解甚至消除數(shù)據(jù)分布的影響,使算法更加關(guān)注訓(xùn)練不足的實(shí)例.在分割點(diǎn)d分割特征j的信息增益的計(jì)算如式(7)所示:
式中,I、(d)和(d) 分別為葉子節(jié)點(diǎn)d及其左右兩個(gè)子節(jié)點(diǎn)上的樣本個(gè)數(shù);Al和Ar分別為d的左、右兩個(gè)子節(jié)點(diǎn)上的大梯度樣本集合;Bl和Br分別為d的左、右兩個(gè)子節(jié)點(diǎn)上的小梯度樣本集合;?i為第i個(gè)樣本Xi的梯度.
通過(guò)將互斥的特征綁定為單一特征,EFB 從捆綁的特征中構(gòu)建直方圖,達(dá)到了在不損失精度的情況進(jìn)行特征降維的目的.首先,EFB 計(jì)算并判斷特征之間的互斥程度,若兩個(gè)特征之間的互斥程度之和小于設(shè)定的閾值,則綁定它們的特征,減少參與訓(xùn)練的特征數(shù),提高模型訓(xùn)練效率.其中,兩個(gè)特征是否互斥及其互斥程度,可按式(8)和式(9)進(jìn)行判斷:
式中,和分別為樣本i的第u和第v個(gè)特征的數(shù)值,E為判斷兩個(gè)特征互斥程度的閾值.
3 基于多維度特征融合的云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)
現(xiàn)有的任務(wù)執(zhí)行時(shí)間預(yù)測(cè)算法缺乏有效的非線性表達(dá)能力和高維稀疏數(shù)據(jù)解析能力,導(dǎo)致任務(wù)執(zhí)行時(shí)間預(yù)測(cè)精度低,難以滿(mǎn)足大數(shù)據(jù)環(huán)境下的云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)要求.為此,本文提出了一種基于多維度特征融合的云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)算法.首先,針對(duì)類(lèi)別型數(shù)據(jù)xCa和數(shù)值型數(shù)據(jù)xNu,設(shè)計(jì)異質(zhì)特征提取器,實(shí)現(xiàn)對(duì)類(lèi)別型特征和數(shù)值型特征的有效提取.其次,有選擇地融合原始數(shù)據(jù)特征和提取到的特征,為預(yù)測(cè)模型提供更全面、更深層的融合知識(shí).最后,基于融合特征數(shù)據(jù)構(gòu)建預(yù)測(cè)模型,實(shí)現(xiàn)對(duì)云工作流任務(wù)執(zhí)行時(shí)間的精準(zhǔn)預(yù)測(cè).本文基于多維度特征融合的云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)模型如圖1 所示,主要包括特征提取、特征融合和預(yù)測(cè)3 個(gè)部分.
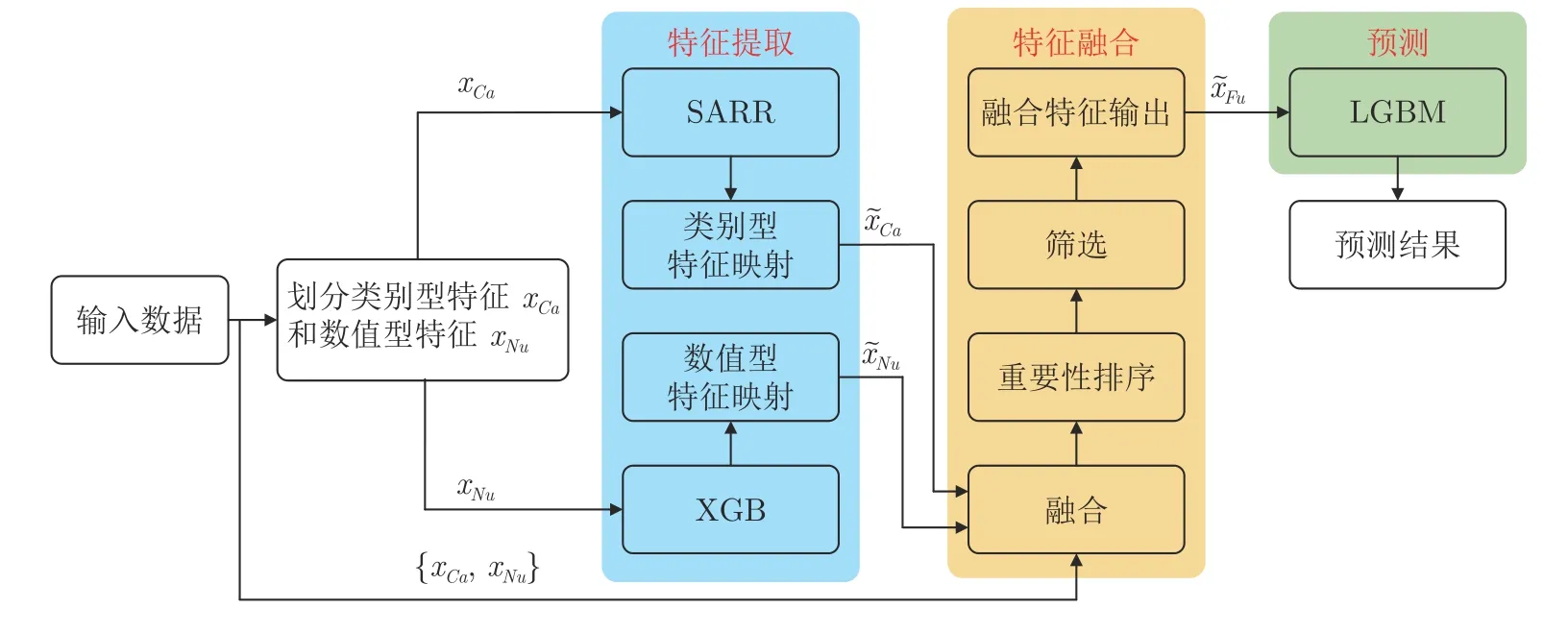
圖1 基于多維度特征融合的云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)模型Fig.1 The multi-dimensional feature fusion-based runtime prediction model for cloud workflow tasks
3.1 基于SARR 的類(lèi)別型特征提取
基于神經(jīng)網(wǎng)絡(luò)的預(yù)測(cè)任務(wù),通常包括特征提取和預(yù)測(cè)兩個(gè)步驟.為充分挖掘類(lèi)別型數(shù)據(jù)相關(guān)的知識(shí),本文MDFF 算法采用具有注意力機(jī)制的堆疊殘差循環(huán)網(wǎng)絡(luò)(Stacked attention residual recurrent neural network,SARR)提取類(lèi)別型特征.在RNN 網(wǎng)絡(luò)的基礎(chǔ)上,通過(guò)引入注意力機(jī)制和添加殘差連接,構(gòu)建堆疊殘差循環(huán)網(wǎng)絡(luò),設(shè)計(jì)基于SARR的類(lèi)別型特征提取器.
SARR 包括Embedding 模塊、門(mén)控循環(huán)單元(Gate recurrent unit,GRU)模塊和LSTM 模塊三個(gè)部分,如圖2 所示.圖2 中,Embedding 模塊包含基于RNN 的Embedding 單元;GRU 模塊包括GRU 單元、Attention 單元以及殘差連接;LSTM模塊包含LSTM 單元、Attention 單元以及殘差連接.
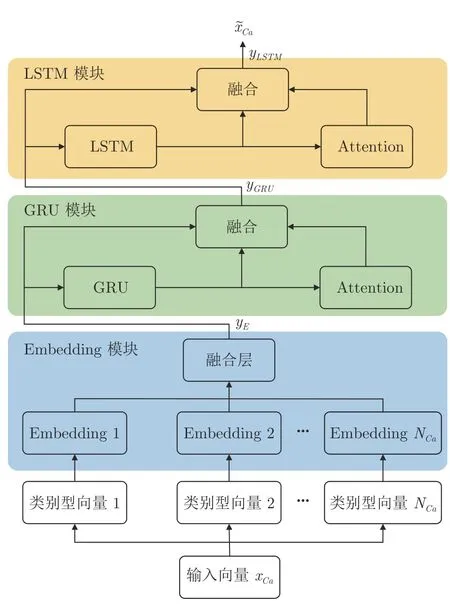
圖2 基于SARR 的類(lèi)別型特征提取器Fig.2 The SARR-based Categorical feature extractor

SARR 在不增加網(wǎng)絡(luò)層數(shù)的情況下,解決了梯度消失可能引起的網(wǎng)絡(luò)退化問(wèn)題,能夠提取與任務(wù)執(zhí)行時(shí)間顯著相關(guān)的特征,并通過(guò)為最終的預(yù)測(cè)器提供更有效的特征,改善預(yù)測(cè)精度.
3.2 基于XGB 的數(shù)值型特征提取
基于梯度提升機(jī)的預(yù)測(cè)方法,通常包括特征提取和預(yù)測(cè)兩個(gè)步驟.為充分挖掘數(shù)值型數(shù)據(jù)相關(guān)的知識(shí),本文設(shè)計(jì)了基于XGB 的數(shù)值型特征提取器,如圖3 所示.其中,從每一個(gè)XGB 基學(xué)習(xí)器的根節(jié)點(diǎn)到葉子節(jié)點(diǎn)所進(jìn)行的運(yùn)算為特征提取過(guò)程,從所有基學(xué)習(xí)器的葉子節(jié)點(diǎn)到輸出節(jié)點(diǎn)的計(jì)算屬于預(yù)測(cè)過(guò)程.
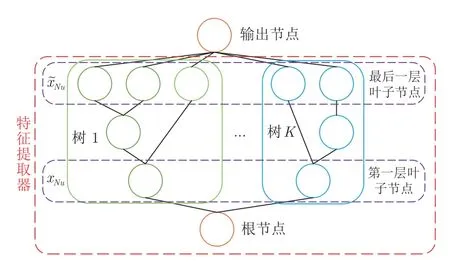
圖3 基于XGB 的數(shù)值型特征提取器Fig.3 The XGB-based Numerical feature extractor
然后,通過(guò)樹(shù)的結(jié)構(gòu)函數(shù)q(·) 尋找每個(gè)數(shù)值型向量在每棵樹(shù)的每個(gè)分支最深一層中所屬葉子的下標(biāo),并標(biāo)記為1,對(duì)每個(gè)數(shù)值型向量進(jìn)行離散化編碼.結(jié)構(gòu)函數(shù)q(·) 如式(14)所示:

式中,Tk為第k棵樹(shù)的葉子節(jié)點(diǎn)數(shù)量.利用XGB對(duì)數(shù)值型向量進(jìn)行離散化編碼后獲得的新向量,即為數(shù)值型特征向量
3.3 多維異質(zhì)特征融合
在提取的類(lèi)別型特征和數(shù)值型特征基礎(chǔ)上,本文進(jìn)一步提出了多維異質(zhì)特征融合策略,旨在同時(shí)收集低維和高維特征信息之間的交互信息,使預(yù)測(cè)模型學(xué)習(xí)到更全面且有效的任務(wù)執(zhí)行時(shí)間知識(shí),降低預(yù)測(cè)誤差.
本文提出的多維異質(zhì)特征融合策略,包含特征拼接、特征重要性計(jì)算、特征排序和篩選幾個(gè)步驟.首先,將SARR 與XGB 模型提取到的特征向量與原始輸入向量進(jìn)行拼接,得到一個(gè)式(15)所示的新輸入向量xfu1,且xfu1∈R1×(NCa+NNu+NSARR+NXGB):

然后,利用xfu1訓(xùn)練LGBM 模型,用于計(jì)算不同特征的重要性,并按重要性對(duì)特征進(jìn)行排序:

式中,xi為拼接向量xfu1中的第i維特征,fimp(·)為特征重要性計(jì)算與排序函數(shù),Nsplit(xi) 為整個(gè)特征重要性排序模型生成過(guò)程中xi被選取為分裂節(jié)點(diǎn)的次數(shù).最后,從排序表中篩選出更具判別力的特征,構(gòu)成用于任務(wù)執(zhí)行時(shí)間預(yù)測(cè)的多維度融合輸入特征向量

式中,threshold為特征篩選閾值,且xi被選為分裂點(diǎn)的次數(shù)越多,說(shuō)明xi對(duì)預(yù)測(cè)結(jié)果的貢獻(xiàn)越大.
3.4 云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)
在獲得多維異質(zhì)融合特征的基礎(chǔ)上,本文采用LGBM 模型對(duì)多維異質(zhì)特征進(jìn)行充分挖掘與利用,以精準(zhǔn)地預(yù)測(cè)任務(wù)執(zhí)行時(shí)間,為大數(shù)據(jù)環(huán)境下的云工作流調(diào)度提供決策支持.
本文基于多維度特征融合的云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)方法,包括3 個(gè)部分:1)針對(duì)類(lèi)別型數(shù)據(jù)和數(shù)值型數(shù)據(jù),設(shè)計(jì)不同的特征提取方法,分別提取類(lèi)別型和數(shù)值型特征;2)將提取到的特征數(shù)據(jù)與原始數(shù)據(jù)進(jìn)行選擇性融合,為預(yù)測(cè)模型提供更全面的特征輸入;3)構(gòu)建基于融合特征的預(yù)測(cè)模型,獲得云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)結(jié)果.整體流程如下:
步驟1.輸入云工作流任務(wù)執(zhí)行時(shí)間數(shù)據(jù)集D={(Xi,Yi)},其中,Xi為第i個(gè)樣本的任務(wù)執(zhí)行時(shí)間影響因素向量;Yi為第i個(gè)樣本的任務(wù)執(zhí)行時(shí)間.
步驟2.將一個(gè)輸入數(shù)據(jù)向量Xi劃分為類(lèi)別型數(shù)據(jù)向量xCa和數(shù)值型數(shù)據(jù)向量xNu,即Xi={xCa,xNu}.
步驟3.利用類(lèi)別型數(shù)據(jù)向量xCa,訓(xùn)練SARR模型,不斷調(diào)整參數(shù),直至獲得誤差最小的SARR 模型.
步驟4.對(duì)訓(xùn)練好的SARR 模型,去掉其輸出層以及輸出層的所有連接參數(shù),得到類(lèi)別型特征提取器,并對(duì)xCa進(jìn)行特征提取,獲得類(lèi)別型特征向量.
步驟5.利用數(shù)值型數(shù)據(jù)向量xNu,訓(xùn)練XGB模型,并對(duì)xNu進(jìn)行特征提取,獲得初始數(shù)值型特征向量
步驟6.利用類(lèi)別型特征向量和初始數(shù)值型特征向量訓(xùn)練LGBM 評(píng)判模型.
步驟7.調(diào)整XGB 模型參數(shù),重復(fù)步驟5~6,直至LGBM 評(píng)判模型的誤差穩(wěn)定在一定范圍內(nèi),且波動(dòng)不超過(guò)5%;挑選出使LGBM 評(píng)判模型誤差最小的XGB 模型參數(shù),并基于該組參數(shù)訓(xùn)練XGB模型.
步驟8.對(duì)訓(xùn)練好的XGB 模型,去掉其輸出層以及輸出層的所有連接參數(shù),獲得數(shù)值型特征提取器,并對(duì)xNu進(jìn)行特征提取,獲得最終數(shù)值型特征向量
步驟9.構(gòu)建多維異質(zhì)特征融合器,將類(lèi)別型數(shù)據(jù)向量xCa、數(shù)值型數(shù)據(jù)向量xNu、類(lèi)別型特征向量和數(shù)值型特征向量進(jìn)行融合,獲得融合后的特征向量
步驟10.基于融合特征向量利用網(wǎng)格尋優(yōu)算法訓(xùn)練LGBM 預(yù)測(cè)模型,直至獲得誤差最小的LGBM 模型,并將其作為預(yù)測(cè)器.
步驟11.取出類(lèi)別型特征提取器、數(shù)值型特征提取器、多維異質(zhì)特征融合器和預(yù)測(cè)器,構(gòu)建基于多維度特征融合的云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)模型.
步驟12.輸出云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)模型.
4 實(shí)驗(yàn)結(jié)果與分析
為了驗(yàn)證所提出的基于多維度特征融合的云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)模型的有效性,本文選擇2018 年阿里巴巴集群數(shù)據(jù)集行進(jìn)行仿真實(shí)驗(yàn),通過(guò)在不同指標(biāo)下與6 種基線預(yù)測(cè)方法進(jìn)行對(duì)比說(shuō)明本文方法的優(yōu)越性.
4.1 實(shí)驗(yàn)配置
4.1.1 數(shù)據(jù)集
本文實(shí)驗(yàn)數(shù)據(jù)來(lái)源于阿里巴巴2018 年集群運(yùn)行日志數(shù)據(jù)集Cluster-trace-v2018[32].Cluster-tracev2018 記錄了阿里巴巴某個(gè)生產(chǎn)集群中約4 000 臺(tái)服務(wù)器8 天的運(yùn)行詳細(xì)日志,具體可查閱https://github.com/alibaba/clusterdata/blob/master/Clu ster-trace-v2018.
在進(jìn)行云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)前,本文對(duì)Cluster-trace-v2018 數(shù)據(jù)集進(jìn)行了預(yù)處理.首先,分析Cluster-trace-v2018 數(shù)據(jù)集,尋找任務(wù)執(zhí)行時(shí)間相關(guān)的關(guān)鍵屬性,并根據(jù)這些關(guān)鍵屬性匹配不同數(shù)據(jù)表中的數(shù)據(jù),獲得包含任務(wù)執(zhí)行時(shí)間和相關(guān)影響因素的數(shù)據(jù)集.其次,對(duì)該數(shù)據(jù)集存在的異常值和缺失值進(jìn)行處理,獲得包含22 155 組云工作流任務(wù)的執(zhí)行時(shí)間及其對(duì)應(yīng)的所有影響因素?cái)?shù)據(jù),即最終可用于檢驗(yàn)算法的云工作流任務(wù)執(zhí)行時(shí)間數(shù)據(jù)集.最后,在獲取的數(shù)據(jù)集上隨機(jī)抽取17 724 組數(shù)據(jù)構(gòu)成訓(xùn)練集,將剩余的4 431 組數(shù)據(jù)作為測(cè)試集.
4.1.2 對(duì)比算法
為了驗(yàn)證MDFF 的有效性和優(yōu)越性,本文選取了六種對(duì)比算法,包括深度興趣網(wǎng)絡(luò)(Deep interest network,DIN)[33]、深度交叉網(wǎng)絡(luò)(Deep &cross network,DCN)[34]、深度因子分解機(jī)(Deep factorization machine,DeepFM)[35]、寬度與深度模型(Wide &Deep,W&D)[36]、兩階段預(yù)測(cè)方法(Two stage approach,TSA)[37]和梯度提升樹(shù)與線性回歸的結(jié)合方法(Gradient boosting decision tree+linear regression,GBDT+LR)[38].其中,DIN和DCN 側(cè)重于類(lèi)別型數(shù)據(jù)的處理,其數(shù)值型特征提取能力弱;TSA 以及GBDT+LR 偏向于數(shù)值型數(shù)據(jù)的處理,類(lèi)別型特征的提取能力弱;Deep-FM和W&D 能同時(shí)提取類(lèi)別型特征和數(shù)值型特征.所有方法采用的參數(shù)組合均為使預(yù)測(cè)效果最好的參數(shù)組合,其具體模型結(jié)構(gòu)或參數(shù)設(shè)置如下:
在DIN 中,嵌入單元1和2 的維度分別為82和80,Dense 單元的神經(jīng)元個(gè)數(shù)為16,隱含神經(jīng)元個(gè)數(shù)為32,激活函數(shù)為Relu,輸出層神經(jīng)元個(gè)數(shù)為1,激活函數(shù)為Relu;最大迭代次數(shù)為500,批量大小為100,優(yōu)化器為Adam.
DCN 的嵌入維度為8,網(wǎng)絡(luò)的隨機(jī)失活(Dropout)比例均為0.5,隱含層的神經(jīng)元個(gè)數(shù)為64-64,領(lǐng)域維度設(shè)為原始特征維度,交叉寬度設(shè)為領(lǐng)域維度與嵌入維度的乘積;最大迭代次數(shù)為450,批量大小為100,批量標(biāo)準(zhǔn)化因子為1,批量標(biāo)準(zhǔn)化衰減因子為0.95,學(xué)習(xí)率為0.01,L2正則化系數(shù)為0.01,優(yōu)化器為Adam.
DeepFM 的嵌入維度為80,其因子分解機(jī)和網(wǎng)絡(luò)的隨機(jī)失活(Dropout)比例分別為1和0.5,網(wǎng)絡(luò)部分的神經(jīng)元個(gè)數(shù)為32-32,激活函數(shù)為Relu;最大迭代次數(shù)為500,批量大小為100,批量標(biāo)準(zhǔn)化因子為1,批量標(biāo)準(zhǔn)化衰減因子為0.995,學(xué)習(xí)率為0.01,L2正則化系數(shù)為0.01,優(yōu)化器為Adam.
在W&D 中,Wide 部分采用線性回歸方法,并選用默認(rèn)參數(shù).Deep 部分采用含兩個(gè)隱含層的神經(jīng)網(wǎng)絡(luò),其結(jié)構(gòu)為325-100-50-1,網(wǎng)絡(luò)部分神經(jīng)元個(gè)數(shù)為32-32,激活函數(shù)為Relu.最大迭代次數(shù)為500,批量大小為100,優(yōu)化器為Adam.
在TSA 中,第1 階段預(yù)測(cè)采用隨機(jī)森林,基學(xué)習(xí)器數(shù)量為200,最大樹(shù)深度為7;第2 階段采用線性回歸,且選用默認(rèn)參數(shù).
在GBDT+LR 中,GBDT 部分的基學(xué)習(xí)器數(shù)量為150,LR 部分采用線性回歸,且選取默認(rèn)參數(shù).
在MDFF 中,類(lèi)別型特征提取模型SARR 的嵌入單元1和2 的維度分別為82和80,Dense 單元神經(jīng)元個(gè)數(shù)為16,GRU 單元和LSTM 單元的神經(jīng)元個(gè)數(shù)均為32,最大迭代次數(shù)為400,批量大小為100,隨機(jī)失活(Dropout)比例為0.15,激活函數(shù)為Relu,優(yōu)化器為Adam.數(shù)值型特征提取模型XGB 的基學(xué)習(xí)器數(shù)量為30,學(xué)習(xí)率為0.15,最大樹(shù)深度為8,列采樣比例為0.4.任務(wù)執(zhí)行時(shí)間預(yù)測(cè)模型LGBM 的學(xué)習(xí)率為0.15,基學(xué)習(xí)器數(shù)量為1 000,最大樹(shù)深度為9,最多葉子結(jié)點(diǎn)個(gè)數(shù)為31,列采樣比例為0.4.
4.1.3 評(píng)價(jià)指標(biāo)
為了檢驗(yàn)本文MDFF 算法的預(yù)測(cè)精度,本文選取了平均絕對(duì)誤差(Mean absolute error,MAE)、均方根誤差(Root mean square error,RMSE)、均方根對(duì)數(shù)誤差(Root mean square log error,RMSLE)和決定系數(shù)(R square,R2)四種評(píng)價(jià)指標(biāo)[39-40],并在這些評(píng)價(jià)指標(biāo)的基礎(chǔ)上,設(shè)計(jì)了預(yù)測(cè)精度差值δ和預(yù)測(cè)精度改善比例η兩個(gè)指標(biāo),分別用于反映MDFF 算法的預(yù)測(cè)精度提升的數(shù)值大小以及提升程度.
1) MAE 表示目標(biāo)真實(shí)值和預(yù)測(cè)值之差的平均絕對(duì)值,用于度量?jī)蓚€(gè)變量之間的差異.MAE具有較強(qiáng)的可解釋性和魯棒性,且MAE的值越小,說(shuō)明預(yù)測(cè)模型的性能越好.MAE的具體計(jì)算如式(18)所示:
式中,n為樣本數(shù)量,分別為第i個(gè)樣本的真實(shí)值和預(yù)測(cè)值.
2) RMSE 表示目標(biāo)真實(shí)值和預(yù)測(cè)值的樣本標(biāo)準(zhǔn)差,用于度量模型的預(yù)測(cè)誤差大小.RMSE 與數(shù)值范圍緊密相關(guān),相對(duì)于MAE 來(lái)說(shuō),RMSE 對(duì)數(shù)值預(yù)測(cè)的錯(cuò)誤更加敏感,但魯棒性較弱.RMSE 的值越小,說(shuō)明預(yù)測(cè)模型的性能越好.計(jì)算公式如下:

3) RMSLE.鑒于RMSE 容易被數(shù)值較大的樣本所主導(dǎo),RMSLE 在RMSE 的基礎(chǔ)上增加了取對(duì)數(shù)操作,以便在保持RMSE 敏感性的基礎(chǔ)上,對(duì)模型進(jìn)行公平地評(píng)價(jià).RMSLE 的值越小,說(shuō)明預(yù)測(cè)模型的性能越好.計(jì)算公式如下:

4) R2 通過(guò)數(shù)據(jù)的變化來(lái)表征一個(gè)預(yù)測(cè)算法的擬合程度.R2 的值越大,說(shuō)明預(yù)測(cè)模型的性能越好.計(jì)算公式如下:

5)預(yù)測(cè)精度差值δ用于表示本文MDFF 算法預(yù)測(cè)精度提升的數(shù)值大小.計(jì)算公式如下:
6)預(yù)測(cè)精度提升比例η表示MDFF 算法的預(yù)測(cè)精度改善程度.計(jì)算公式如下:
4.2 實(shí)驗(yàn)結(jié)果分析
為了避免隨機(jī)性,本文采用10 次實(shí)驗(yàn)結(jié)果的平均值進(jìn)行性能比較.針對(duì)不同的評(píng)價(jià)指標(biāo),分別計(jì)算所有方法的MAE、RMSE、RMSLE和R2 值,如圖4~7 所示.由圖4~圖6 可知,本文MDFF 算法的MAE、RMSE、RMSLE 值達(dá)到了最小,說(shuō)明其預(yù)測(cè)結(jié)果的平均絕對(duì)誤差和均方根誤差更小,且對(duì)大數(shù)值樣本的偏向性最小.由圖7 可知,MDFF 的R2 值最大,說(shuō)明該算法的擬合程度最好.
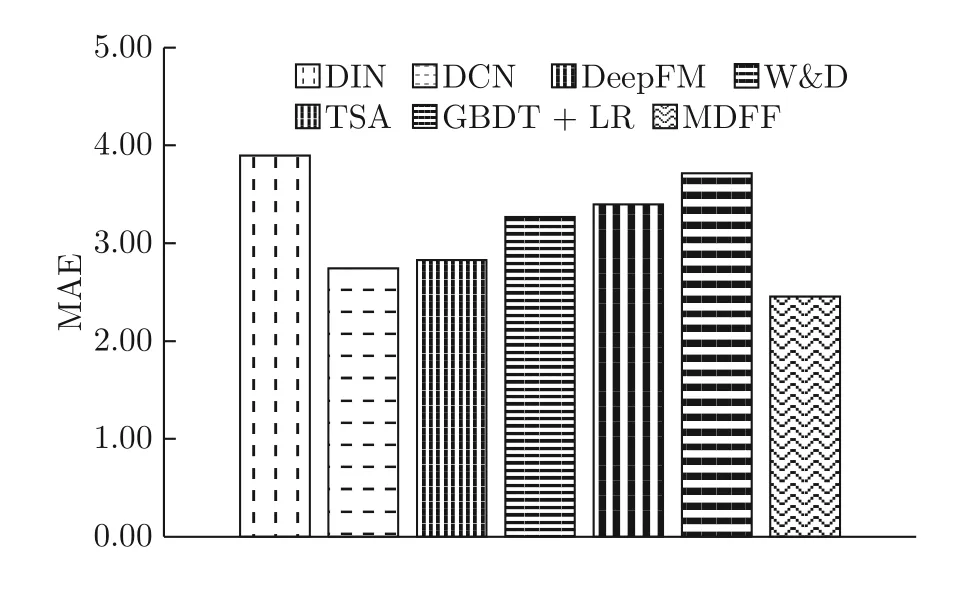
圖4 不同方法的MAEFig.4 MAE comparisons among different methods
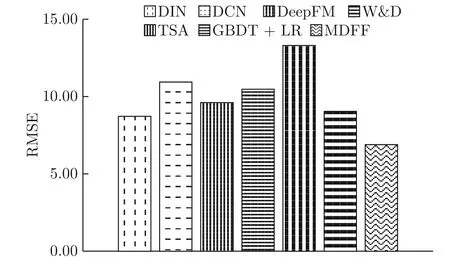
圖5 不同方法的RMSEFig.5 RMSE comparisons among different methods
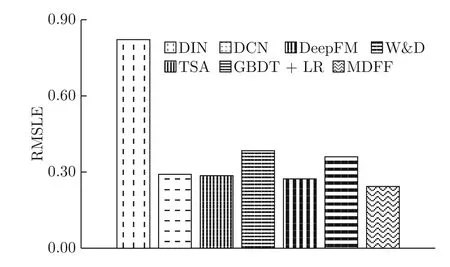
圖6 不同方法的RMSLEFig.6 RMSLE comparisons among different methods
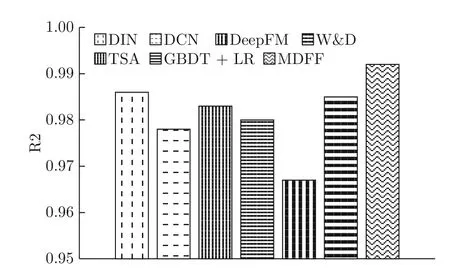
圖7 不同方法的R2Fig.7 R2 comparisons among different methods
由圖4~7 結(jié)果,可以得出以下結(jié)論:
1)由于DIN、DCN、TSA和GBDT+LR 要么側(cè)重提取類(lèi)別型特征,要么側(cè)重提取數(shù)值型特征,而忽略另外一類(lèi)特征,使模型很難獲得全面的特征知識(shí).因此,其模型對(duì)特征的非線性表達(dá)能力和解析能力不足.在本文提出的MDFF 算法中,針對(duì)類(lèi)別型數(shù)據(jù)和數(shù)值型數(shù)據(jù)的特點(diǎn),分別設(shè)計(jì)不同的特征提取器,有效地從原始數(shù)據(jù)中提取類(lèi)別型特征和數(shù)值型特征,挖掘更全面的任務(wù)執(zhí)行時(shí)間知識(shí),提高了工作流任務(wù)執(zhí)行時(shí)間的預(yù)測(cè)精度.在上述四類(lèi)評(píng)價(jià)指標(biāo)下,MDFF 算法的預(yù)測(cè)性能均優(yōu)于四類(lèi)對(duì)比算法,即DIN、DCN、TSA和GBDT+LR.
值得注意的是,注意力機(jī)制的引入,使得DIN的RMSE和R2 僅次于MDFF,預(yù)測(cè)誤差波動(dòng)相對(duì)較小且獲得了較好的擬合效果.這也說(shuō)明了本文采用具有注意力機(jī)制的SARR 模型,在提取類(lèi)別型特征方面的有效性.由于梯度提升算法對(duì)數(shù)值型數(shù)據(jù)進(jìn)行了離散化編碼,所以GBDT+LR 的RMSE和R2 值僅次于DIN,且預(yù)測(cè)誤差較小,達(dá)到了較好的擬合效果,這說(shuō)明本文設(shè)計(jì)的基于XGB 的特征提取算法,能夠有效地提取數(shù)值型特征.
2)雖然DeepFM和W&D 算法能同時(shí)提取類(lèi)別型特征和數(shù)值型特征,但是與本文MDFF 算法相比,其預(yù)測(cè)結(jié)果相對(duì)較差.主要原因如下:a)本文提出的MDFF 算法,通過(guò)具有堆疊循環(huán)網(wǎng)絡(luò)結(jié)構(gòu)、注意力機(jī)制和殘差連接的SARR 模型,將類(lèi)別型數(shù)據(jù)從高維稀疏的特征空間映射到低維稠密的特征空間,提高了模型對(duì)類(lèi)別型特征的關(guān)注度.因此,與DeepFM和W&D 采用DNN 進(jìn)行類(lèi)別型特征提取相比,MDFF 算法能夠更有效地提取類(lèi)別型特征;b) DeepFM和W&D 分別采用因子分解機(jī)和線性回歸模型提取數(shù)值型特征,而本文MDFF 算法利用XGB 對(duì)數(shù)值型數(shù)據(jù)進(jìn)行離散化編碼,通過(guò)對(duì)過(guò)于稠密的輸入向量空間進(jìn)行稀疏化處理,提高了特征之間的差異性,從而能更有效地提取數(shù)值型特征.此外,通過(guò)異質(zhì)多維度特征融合策略,本文MDFF 算法能夠有效避免因直接使用類(lèi)別型特征和數(shù)值型特征而引入冗余信息或者噪聲的可能性.總的來(lái)說(shuō),SARR和XGB 的使用,使得MDFF具有更強(qiáng)的提取類(lèi)別型和數(shù)值型特征的能力,結(jié)合多維異質(zhì)特征融合策略,MDFF 不僅能夠提取有效的深層特征,還能學(xué)習(xí)更全面的任務(wù)執(zhí)行時(shí)間知識(shí),使預(yù)測(cè)性能得到了明顯改善.
為了進(jìn)一步說(shuō)明本文提出的MDFF 算法與對(duì)比算法在不同指標(biāo)上的精度提升程度,表1和表2給出了MDFF 與其他對(duì)比算法在四種性能指標(biāo)下的差值和性能提升比例.
由表1和表2 可以看出,不同算法在不同性能指標(biāo)下具有不同的性能表現(xiàn),且MDFF 與對(duì)比算法的性能差值以及MDFF 算法的性能提升比例也不相同,但相對(duì)來(lái)說(shuō),本文提出的MDFF 算法在不同性能指標(biāo)下的表現(xiàn)更優(yōu).這也說(shuō)明了MDFF 具有更強(qiáng)的類(lèi)別型和數(shù)值型特征提取能力,同時(shí)對(duì)特征進(jìn)行重要性排序并有選擇性地融合,大大提高了預(yù)測(cè)性能.
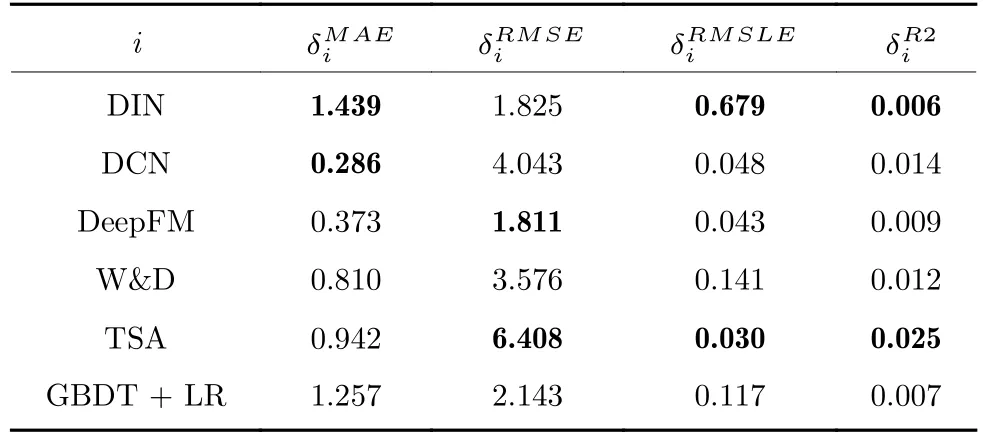
表1 預(yù)測(cè)精度的差值Table 1 The difference of prediction performance
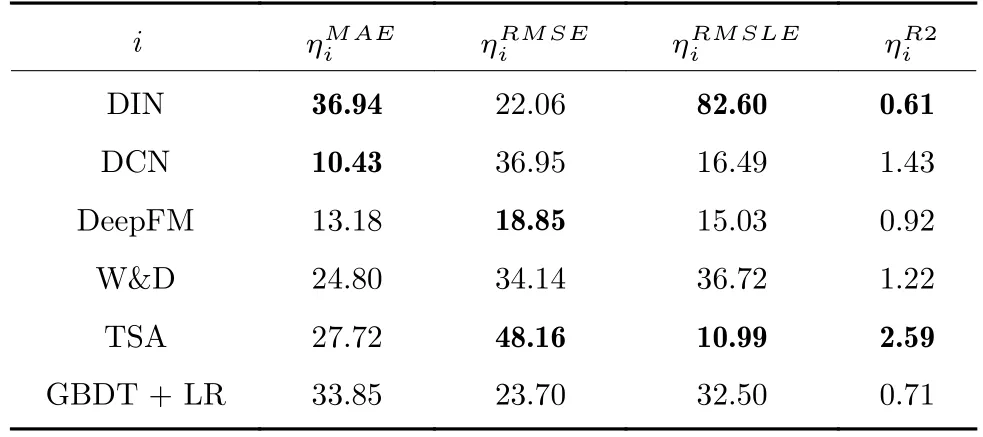
表2 預(yù)測(cè)精度提升的比例(%)Table 2 The proportion of performance improvement (%)
在上述性能指標(biāo)的對(duì)比中,本文提出的MDFF 算法都能取得良好的性能表現(xiàn),即MDFF 算法具有較強(qiáng)的異質(zhì)特征提取與融合能力,獲得了更高的預(yù)測(cè)精度.與各類(lèi)對(duì)比算法相比,MDFF 算法主要有以下3 個(gè)方面的優(yōu)勢(shì):1) MDFF 算法采用SARR提取類(lèi)別型特征,將類(lèi)別型數(shù)據(jù)從高維稀疏的特征空間映射到低維稠密的特征空間,避免了搜索空間過(guò)大的問(wèn)題,提高了模型對(duì)類(lèi)別型特征的關(guān)注度.因此,相對(duì)于普通DNN 網(wǎng)絡(luò),MDFF 算法能更有效地、更具針對(duì)性地提取類(lèi)別型特征;2) MDFF 采用XGB 提取數(shù)值型特征,即借助于XGB 對(duì)數(shù)值型數(shù)據(jù)進(jìn)行離散化編碼,并對(duì)過(guò)于稠密的輸入向量空間進(jìn)行稀疏化處理,提高了特征之間的差異性,實(shí)現(xiàn)了數(shù)值型特征的有效提取;3) MDFF 采取多維異質(zhì)特征融合策略,對(duì)SARR和XGB 提取到的特征進(jìn)行有選擇性地融合,以充分挖掘與利用多維度特征,為任務(wù)執(zhí)行時(shí)間的預(yù)測(cè)提供更全面有效的知識(shí),改善了預(yù)測(cè)性能.由此可見(jiàn),通過(guò)類(lèi)別型特征和數(shù)值型特征的有效提取與融合,MDFF 算法的預(yù)測(cè)精度得到了明顯提升.
綜上所述,本文提出的基于多維度特征融合的預(yù)測(cè)算法預(yù)測(cè)平均誤差、預(yù)測(cè)誤差波動(dòng)和預(yù)測(cè)偏向性更小,不僅對(duì)類(lèi)別型特征和數(shù)值型特征有較強(qiáng)的解析和表達(dá)能力,而且能夠?qū)Ξ愘|(zhì)特征進(jìn)行充分地挖掘與利用,實(shí)現(xiàn)了對(duì)云工作流任務(wù)執(zhí)行時(shí)間的精準(zhǔn)預(yù)測(cè),可以滿(mǎn)足大數(shù)據(jù)環(huán)境下的云工作流任務(wù)執(zhí)行時(shí)間估計(jì)需求.
5 結(jié)束語(yǔ)
云計(jì)算中的工作流調(diào)度和資源配置依賴(lài)于任務(wù)執(zhí)行時(shí)間的準(zhǔn)確估計(jì).本文針對(duì)工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)問(wèn)題,提出了一種基于多維度特征融合的預(yù)測(cè)方法.首先,構(gòu)建具有注意力機(jī)制的堆疊殘差循環(huán)網(wǎng)絡(luò),對(duì)類(lèi)別型數(shù)據(jù)進(jìn)行特征提取,增強(qiáng)了模型對(duì)類(lèi)別型數(shù)據(jù)的解析能力.其次,引入XGB 對(duì)數(shù)值型數(shù)據(jù)進(jìn)行離散化編碼,提取數(shù)值型特征,提高了模型的非線性表達(dá)能力.然后,融合提取到的特征和原始樣本特征,獲得多維異質(zhì)特征,給預(yù)測(cè)模型提供了更全面的任務(wù)執(zhí)行時(shí)間知識(shí).最后,利用LGBM 對(duì)多維異質(zhì)特征進(jìn)行充分挖掘,構(gòu)建預(yù)測(cè)模型,實(shí)現(xiàn)對(duì)云工作流任務(wù)執(zhí)行時(shí)間的精準(zhǔn)預(yù)測(cè),并采用阿里巴巴的集群數(shù)據(jù)集進(jìn)行了實(shí)驗(yàn)驗(yàn)證.實(shí)驗(yàn)結(jié)果表明,該方法優(yōu)于現(xiàn)有的基線預(yù)測(cè)算法,在MAE、RMSE、RMSLE 以及R2 四種評(píng)價(jià)指標(biāo)下,均達(dá)到了更好的性能.因此,本文所提出的基于多維度特征融合的預(yù)測(cè)方法,能夠滿(mǎn)足大數(shù)據(jù)環(huán)境下云工作流任務(wù)執(zhí)行時(shí)間預(yù)測(cè)的需求.然而,本文僅在集群數(shù)據(jù)集上進(jìn)行了預(yù)測(cè)模型的搭建,如何將預(yù)測(cè)模型部署到實(shí)際云數(shù)據(jù)中心,實(shí)現(xiàn)工作流任務(wù)執(zhí)行時(shí)間的在線預(yù)測(cè),仍需進(jìn)一步探索研究.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
電子制作(2019年15期)2019-08-27 01:12:00
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
中國(guó)生物醫(yī)學(xué)工程學(xué)報(bào)(2017年6期)2017-02-10 05:11:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:21
