多平臺激光雷達測量系統在河道堤防測量中的應用
2023-01-12 13:50:40張占勇付偉鋒
廣東水利水電 2023年1期
關鍵詞:測量
張占勇,付偉鋒
(廣東省水利電力勘測設計研究院有限公司,廣州 510635)
1 概述
激光雷達測量技術是目前測繪領域的一種新的非主動式測量技術,激光雷達可以快速的獲取地理空間物體的三維信息,而且具有速度快、受天氣影響小、密度高、精度高等特點,且對植被具有很好的穿透力[1-2]。激光雷達測量系統還可以搭載在不同的平臺上如機載、車載、背包等進行全天候作業,因此,在在水利工程測量中的應用越來越多[3]。
河道的堤防多呈帶狀分布,兩邊多有村莊和植被,使用傳統的人工測量困難大且效率低,多采用機載激光雷達對河道的堤防進行測量可快速獲取地形表面的三維地理信息數據[4]。機載激光雷達具有穿透力強、可全天候作業、數據獲取快、精度高等優點,但是實際生產中仍會存在許多地方無法使用無人機搭載激光雷達進行測量,如禁飛區限制、起降場地限制、空域限制等。河道堤防地形大都沿江河兩岸分布,地形起伏變化較小,故考慮可以使用多平臺激光雷達進行測量,如車載式、背包式、船載式等。本文探索利用多平臺激光雷達測量系統對河道堤防進行測量,主要采用車載式和背包式對禁飛區域進行數據采集,為后續無法使用無人機搭載激光雷達測量進行補充,是對堤防測量的一種有效補充手段。
2 多平臺激光雷達測量技術介紹
2.1 測量系統介紹
本次試驗使用的多平臺激光雷達測量系統為AS-900HL,是一款可以使用不同的平臺如無人機、汽車、船及行人背包等裝載高精度激光掃描儀,同時有效集成了高精度慣性測量儀,能快速的獲取地形表面三維空間信息的系統(見表1)。
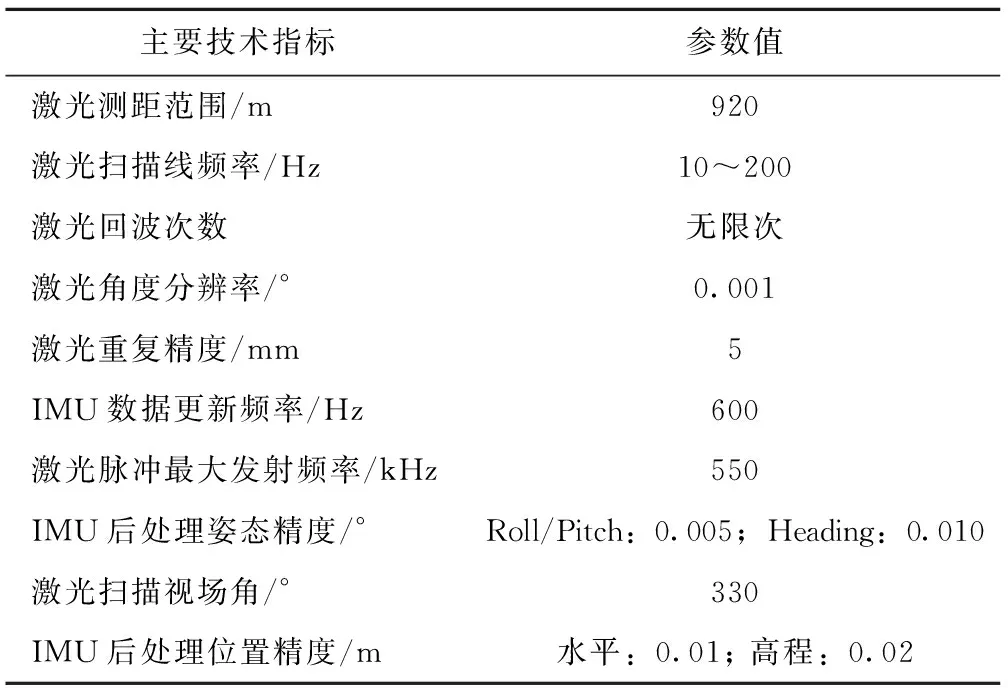
表1 AS-900HL激光雷達測量系統主要參數
2.2 技術路線
由于測區涉及禁飛區,無法使用無人機搭載激光雷達測量系統進行作業,本次試驗設計采用車載式和背包式搭載激光雷達測量系統進行作業(技術路線見圖1)。
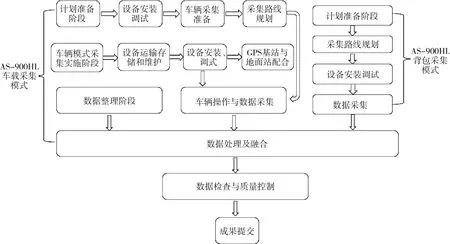
圖1 總體技術路線示意
在作業之前通過實地踏勘,觀察了現場地形、天氣、風力、人口密集情況、干擾、基站架設位置等。選擇人員和車輛比較少的時候進行作業,一般選擇晚上進行作業,干擾也較少。
3 測區概況和測量內容
韓江流域是廣東省的第二大流域,為了對韓江流域的堤防進行加固除險、提高防洪標準,故對韓江流域的干流進行治理,特別是潮州段要達到百年一遇的標準。本次試驗區域位于潮州市潮南區如意大橋附近,長度約為2 km,測量范圍為沿中心線左測至河道岸邊,右邊為100 m(具體試驗范圍如圖2所示)。

圖2 試驗區位置示意
本次試驗區要求地形圖測量比例尺為1∶500精度,該堤防段區域全部位于潮州國際機場的禁飛區域內,無法使用無人機進行測量,測區地形高度無較大落差,但是岸邊有密集的村鎮分布和大量的植被,外業采集困難,故采用多平臺激光雷達的車載式和背包式相結合來獲取測區的高程數據。
4 數據采集
4.1 路線規劃
根據測區范圍和地形特點布置了3條采集路線(見圖3),其中黃色和藍色的線路現場可以行車,路線上空無遮擋地物,使用車載式激光雷達進行數據采集;紅色線路所在的范圍為密集房屋,無法行車但有人行道路,故采用背包式激光雷達進行數據采集。

圖3 總體路線規劃示意
4.2 車載和背包數據采集
車載數據采集在掃描車輛進入測區前,首先需完成 POS 系統的初始化及IMU與GNSS的校準。在正式采集前,應選開闊地帶作為起始點,先靜置5 min,再啟動車輛前進先左方向轉1圈再右方向轉1圈減少IMU的誤差累計。數據采集時,裝載儀器車輛盡量勻速行駛,不超過60 km/h,避免長時間停車,車輛應盡量在道路中心行駛,遠離作業區域兩旁高大樹木及建筑物;避免與大型車輛并行,如遇并行車輛,盡量超車或者避讓,防止激光掃描儀器被遮擋; 行駛過程中,嚴禁倒車。數據采集完畢,需前往開闊地帶,停車進行5 min GNSS靜態測量以保證POS數據的精度[5]。
針對不方便車輛駛入的小路等區域采用背包模式對該區域進行數據采集,以此來補充無法進行車載采集的區域,兩者結合保證了數據采集的完整性。
在使用車載和背包式激光雷達進行數據采集時,基站點布設在測區的中間位置(如圖3中所示),基站距離測區兩段最遠距離不超過2 km,在作業過程中無需更換基站位置,可滿足基站的覆蓋要求,激光雷達進行數據采集時同步記錄移動站數據。
5 內業數據處理
AS-900HL多平臺激光雷達測量系統可以根據掃描頻率獲得不同距離和密度的點云數據,為了獲得高質量的滿足數據處理要求和精度指標的數字高程模型(Digital elevation model,DEM)數據,需要將外業采集點云數據進行數據完整性檢查、POS數據質量檢查、GPS/IMU聯合解算、點云分類、精度檢驗等工作,內業數據處理技術路線示意如圖4所示。

圖4 內業數據處理技術路線示意
5.1 原始點云數據質量檢查
原始點云數據的質量檢查主要包括點云數據覆蓋范圍的完整性、航帶間數據匹配性、點云數據的密度等關鍵因素[6]。本次數據采集共耗時1.5 h,共采集數據2.8個G,平均點云密度210個/m2,符合規范要求[7]。經檢查點云數據范圍可以覆蓋測區,航帶間無明顯分層現象。
5.2 數據處理
激光雷達測量系統采集后的點云數據經過數據質量檢查無問題后需先進行數據預處理操作,之后再對車載和背包式數據進行點云融合,最終進行后處理得到地面點。
激光雷達的數據預處理主要將得到的點云數據根據激光掃描數據、精確位置數據和姿態數據進行解算得到目標物的空間三維坐標。激光雷達的數據后處理主要是噪點去除、點云數據分類和濾波,即采用某種方法對激光雷達點云數據進行處理,從而區分地面點和非地面點。
在數據處理之前,需要提前準備好基站GNSS數據、移動站GNSS數據、雷達數據、慣導數據、系統標定參數等,利用Inertial Explorer(簡稱IE)對數據進行POS解算,獲取高精度的組合導航信息,包括位置、速度和姿態等信息。然后利用IE使用緊耦合方法對車載式和背包式GPS/IMU進行組合解算,經檢查所有處理結果均符合精度要求[8]。
在對點云數據進行預處理后,應對車載式和背包式采集的數據進行融合。首先將3次采集的數據加載到一個數據文件中,根據時間顯示不同的條帶,拉取剖面觀察不同條帶之間是否存在分層。如果存在點云數據分層,則對所有的點云數據進行特征點提取,然后將標準差大于5 cm的特征點進行刪除,重新優化點云數據。如圖5所示,融合前車載數據和背包分層高度為7 cm,剔除標準差大的特征點后車載和背包數據厚度為3 cm。

a 融合前
最后利用Terrasolid軟件將地面點分離出來[9],軟件中的地面點分類算法通過不斷建立三角網模型的方式分離出地面點。該算法應用選中的低點建立初始模型,初始模型的三角形大多數低于地面,只有最高點接觸到地表。然后,算法通過反復加入新的激光點開始向上擴建模型,每個加入的點使模型更加貼近地表[10]。
精修地面點生成DEM,選擇生成可編輯模型,可根據需要,設置不同顏色層數。通過 DEM 截取截面來修補地面點,設置好截取斷面窗口后在DEM 視圖選擇相應修改位置,拉取剖面線,選擇剖面寬度,完成選擇后會在設置好的剖面視圖中彈出剖面。利用模型中的工具結合 DEM 模型,對分類錯誤的地面點進行修補。
6 精度檢測及評價
使用多平臺激光雷達測量系統對河道堤防進行測量數據的采集和處理是影響精度的關鍵因素,因此,必須對點云數據的精度進行分析,尤其是點云的高程精度,需要通過外業采集檢驗點與處理后的點云數據進行比較評價。
由于激光點云是對目標表面離散不規則分布點的位置描述,密度與光斑大小、激光器發射頻率、飛行速度等因素有關,故很難準確地找到控制點所對應的激光腳點。因此,本文采用內插特征點對比分析法對數字高程模型的精度進行分析。
內插特征點對比分析其實質是根據已知數據點利用多項式對一定區域內的表面空間形態的擬合,通過計算機運算,按照一定要求計算分布格網點的高程值。通過在格網點中找出明顯地物特征點的坐標,如線狀地物的交點、房屋角點等,并用 GPS 或全站儀測量出這些特征點的坐標[11-13]。將內插坐標值與測量坐標值進行對比分析與統計,得到點位精度。
根據《基礎地理信息數字成果 1∶500 1∶1 000 1∶2 000 數字高程模型》(CHT 9008.2—2010)規定中的高程中誤差確定數字高程模型的精度,高程中誤差的計算公式如下:
(1)
式中:
δ——DEM的中誤差;
n——檢查點個數;
Zk——檢查點的高程;
Rk——內插出的DEM高程。
本次試驗從外業現場均勻采集了53個點作為檢驗點,高程誤差分析結果和點云高程精度統計結果分別見表2和表3。
從表2中可以看出,大多數的高程較差在±0.02 m以內,最大為0.069 m, 說明此次采集的點云數據高程精度可靠。從表3中可知,檢查點的高程中誤差為0.02,高程精度完全滿足1∶500地形圖要求[14],可用于河道堤防地形圖的制作。

表2 高程精度檢驗 m

表3 點云高程精度統計
7 結語
本文通過采用多平臺激光雷達測量系統對河道堤防進行測量,解決了測量區域由于無法使用無人機搭載激光雷達進行測量,而采用車載式和背包式針對河道堤防的特點相結合的方式獲得測區的地面點云。經過數據處理和外業精度檢驗,高程精度完全符合相關規范要求,可用于滿足高精度地理信息數據產品的生產需要。對后續利用多平臺激光雷達系統在水利工程中的應用提供了重要的參考。
本次試驗也存在一些不足,采集過程中岸邊植被和其他建筑物會對GPS信號產生干擾,在車載和背包無法采集到的地方仍需人工補測及車載和背包數據會存在分層現象,在后續數據采集與處理過程中有待優化。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00