虹吸式吸魚泵的水動力學特性研究
2022-12-29 08:44:56田昌鳳劉興國陳曉龍
漁業現代化 2022年6期
田昌鳳,吳 凡,車 軒,2,劉興國,2,張 俊,陳曉龍
(1 中國水產科學研究院漁業機械儀器研究所,上海 200092;2 農業農村部漁業裝備與工程技術重點試驗室,上海 200092;3 上海海洋大學工程學院,上海,201306)
在全球漁業資源日益匱乏的形勢下,水產養殖業的高效發展關系到人類社會的可持續發展,越來越受到研究人員的廣泛關注[1-2]。2021年,世界水產品產量超過2億t,而中國淡水魚類總產量約占全球的33%,并且是世界上唯一養殖產量高于捕撈產量的國家,而池塘養殖產品是中國水產品總產量的主要組成部分[3-5]。2020年,中國池塘水產養殖面積約262萬hm2,養殖產量2 200多萬t[6],而池塘養殖的捕撈方式還相對原始,基本靠人工完成[7-8]。因此,池塘養殖生產亟需機械化自動化捕撈系統裝備,吸魚泵已成為漁業機械研究的重要方向。
20世紀四五十年代,美國、挪威、法國、日本等漁業發達國家的網箱養殖蓬勃發展[9-12],與之相配套的吸魚泵的研究取得了重要進展,研發了離心式吸魚泵、真空式吸魚泵、空氣揚升式吸魚泵和射流式吸魚泵[13-18],助推了網箱養殖產業的發展。為了研發適合池塘使用的吸魚泵,研究者們研發了真空式吸魚泵和射流式吸魚泵,但仍存在能耗高,輸送效率等問題,并對魚有一定的損傷[19-22]。吸魚泵內部復雜的水力因素和剪切層是造成鱗片脫落的主要原因[23-24]。而吸魚泵內的撞擊、低壓環境以及吸魚泵內部的壓力梯度是鰓蓋損傷、魚鰾破裂、肝臟腎臟受損和魚游動平衡破壞的主要原因[25-26]。
此外,降低能耗也是吸魚泵研究的重點,影響吸魚泵能耗的因素主要有工作方式、魚水比以及輸送管道的阻力損失。研究顯示,射流式吸魚泵的單位質量能耗為1.51 kW·h/t,離心式吸魚泵的單位質量能耗為0.5~0.93 kW·h/t,真空式吸魚泵為0.5~0.6 kW·h/t,虹吸式吸魚泵的單位質量能耗為0.3~0.4 kW·h/t可見虹吸式吸魚泵單位質量能耗最小[8,31]。為了進一步提高吸魚泵的性能,研究者們利用高速攝影技術、圖像處理技術等方法探索了速度梯度、壓力梯度以及機械結構對吸魚泵性能的影響,相繼攻克了眾多技術難題,有效解決了吸魚泵的輸送性能低和損傷大的問題[15-18]。然而,池塘養殖的養殖品種和運行工況有別于網箱養殖,并且傳統的試驗研究周期長,研究成本高,針對研發適用于池塘養殖的鮮活魚類的輸送的吸魚泵的迫切需求,利用CFD數值模擬技術能夠有效縮短吸魚泵的設計時間以及成本,實現了高效吸魚泵的設計優化。
本研究運用數值模擬技術研究了一種虹吸式吸魚泵內部的水動力學特性,系統分析了吸魚泵軸向對稱面以及軸向對稱面上不同檢測線和不同監測點上的速度分布,壓強分布以及渦流黏度分布特性,尋找損傷魚類的關鍵部位,以期降低吸魚泵的能耗和對鮮活水產品的損傷。研究結果對吸魚泵的開發和設計提供了重要的理論指導,具有重要的科學意義。
1 數值計算方法
1.1 計算模型
如圖1所示,數值計算模型根據中國水產科學研究院漁業機械儀器研究所研發的虹吸式吸魚泵進行三維建模,吸魚泵外腔直徑為0.6 m,內腔直徑為0.584 m,壁厚0.008 m,長1.6 m。其中吸魚泵入口位于右側頂端,入口直徑為 0.2 m,出口位于左側底端,出口直徑為0.16 m。
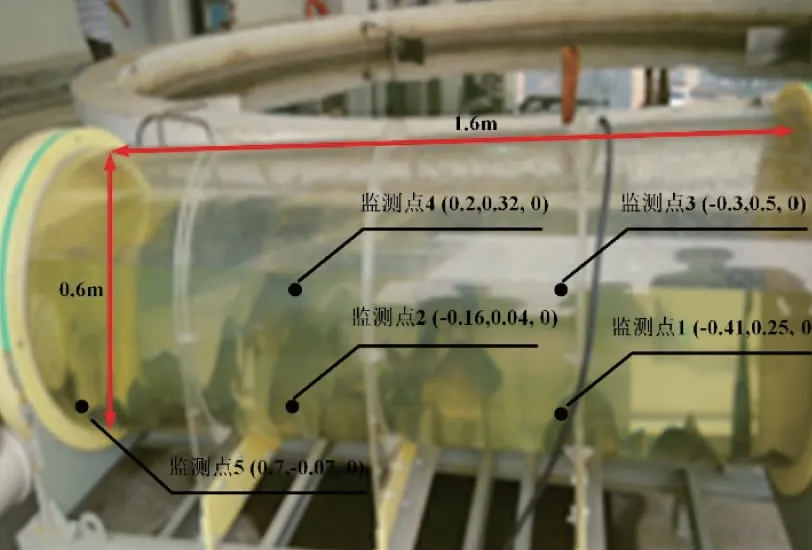
圖1 物理模型和試驗布置
如圖2所示,虹吸式吸魚泵的工作原理是吸魚泵內部注滿水后,開始抽吸活魚,直到吸魚泵內部活魚達到一定的密度后,排出魚水混合物,排凈后再次注滿水后開始抽吸。這種工作方式和工作環境有兩個優勢,一是連續作業時間長,泵內魚水混合的比例可以達到2∶1甚至更高,有效提高了虹吸式吸魚泵的輸送能力;二是吸魚泵內部注滿水后再抽吸活魚,有別于傳統的無水抽吸,吸魚泵內部的水體起到有效的緩沖作用,減少魚體碰撞泵體,從而較少魚體的損傷。
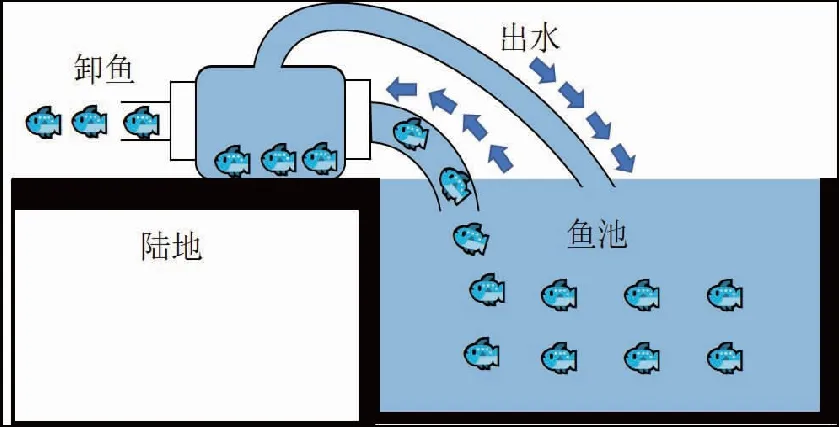
圖2 吸魚泵的工作原理
圖3為虹吸式吸魚泵的流場模型,選取虹吸式吸魚泵軸向對稱面建立直角坐標系,其中x方向為吸魚泵軸向方向,向下為正,y方向為z軸垂直的方向,重力加速度方向為y方向。為了研究吸魚泵內部的流動特性,取吸魚泵軸向對稱面為監測面以及對稱面上的AA’、BB’、CC’、DD’、EE’、FF’6條線為監測線和點1、點2、點3、點4、點5為監測點。將吸魚泵入口設為速度入口邊界,吸魚泵壁面設為無滑移固壁邊界,吸魚泵頂部出口和底部出口均設為壓力出口邊界。
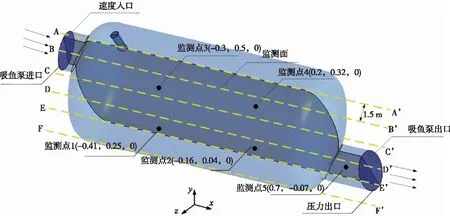
圖3 虹吸式吸魚泵計算模型
1.2 數值計算方法
該流場連續性的和不可壓縮的混合流體相,該流動過程滿足連續性方程和動量守恒方程。充分考慮渦流和低雷諾數對湍流的影響,采用重整化群(RNG)k-ε兩方程模型為湍流模型,與之相關的連續性方程、動量方程、k-ε輸運方程分別為[23-24]:
連續方程:
(1)
式中:ρ為流體密度,v為流動速度矢量,u、v、w是其在x、y、z方向上的分量。
動量方程:

(2)
(3)
(4)
式中:p為流體壓力,F為單位質量流體所受外部力,Fx、Fy、Fz是其在x、y、z方向上的分量,τ為流體的黏性應力,τxx、τxy、τxz、τyx、τyy、τyz、τzx、τzy、τzz為其在對應x、y、z方向上的張量分量,S為流體質量源,Sx、Sy、Sz是其在x、y、z方向上的分量。
標準k-ε方程:
(5)
(6)
式中:xi是空間點上的坐標,ui為在時間t坐標下的速度分量,i=1、2、3。兩方程的k-ε湍流模型系數為:cμ=0.09、Cε1=1.44、Cε2=1.92、σk=1.0、σε=1.3。
2 結果與分析
2.1 吸魚泵監測面上流動特性分析
在輸送過程中,壓強分布是評估活魚是否損傷的重要指標,不同進口速度下監測面上的壓力分布如圖3所示。從計算結果可以看出,隨著進口速度的增大,壓強呈現增大的趨勢,不同進口速度下,壓強在1.01×105~1.09×105Pa范圍內變化,整體變化范圍不大;不同進口速度下監測面上速度矢量圖如圖4所示,可以看出流體從吸魚泵入口進入后,由于具有初速度以及自身慣性的作用下首先沖擊至吸魚泵腔體出口處的頂端壁面,然后由于壁面的反作用力形成了沿腔體輪廓方向的回流,最后在自身重力的作用下落至靠近出口處底端。
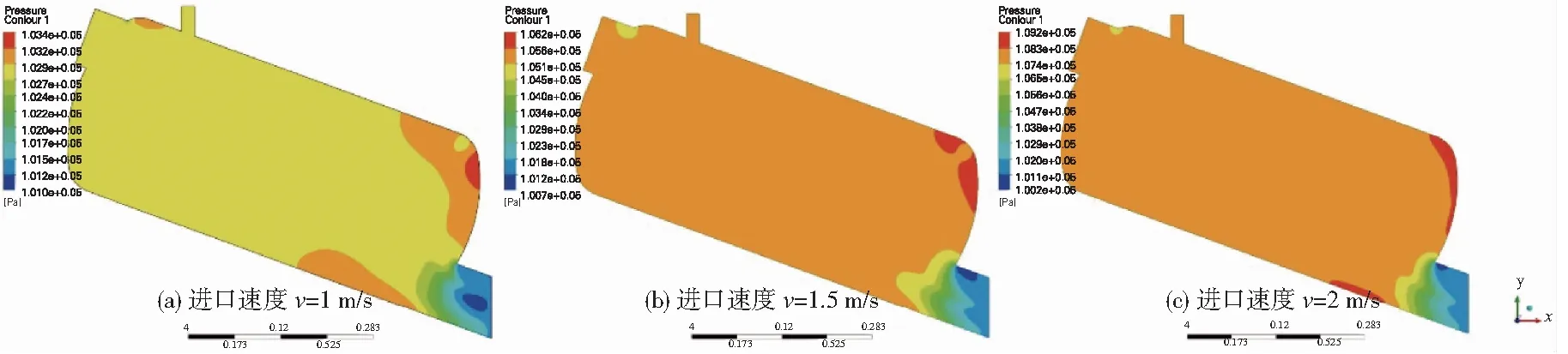
圖4 監測面上的壓力云圖
隨著進口速度的增大,吸魚泵出口側頂端的回流現象越明顯,且流速在0.5~1.98 m/s范圍內變化。壓強最大處主要集中在吸魚泵出口側腔體頂端,該處對魚體損傷最大,其次是來流撞到吸魚泵壁面后形成回流,回流落點處容易對魚體產生二次損傷。渦流黏度是表征湍流特性的一個重要參數,與流動的紊動特性緊密相關。不同速度下吸魚泵內部渦流黏度分布圖如圖5所示。結果表明隨著來流速度的增加靠近吸魚泵出口端的壁面渦流黏度增大,結合圖4說明渦流黏度越大越容易形成渦流/回流,同時也說明該處湍流強度較大,流動紊亂,不利于活魚運輸。
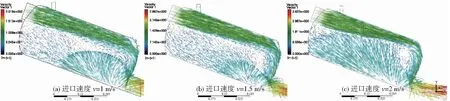
圖5 監測面上的速度矢量圖
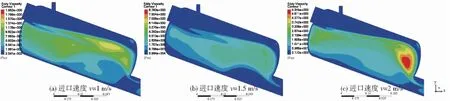
圖6 監測面上的渦流黏度分布圖
2.2 吸魚泵內不同監測線的流動特性分析
為進一步研究吸魚泵內部流動特性,對不同進口速度下,吸魚泵內部AA’、BB’、CC’、DD’、EE’、FF’6條監測線上的速度、壓力作為縱坐標得到該線上的速度特性、壓力分布特性,具體結果如圖7和圖8所示。
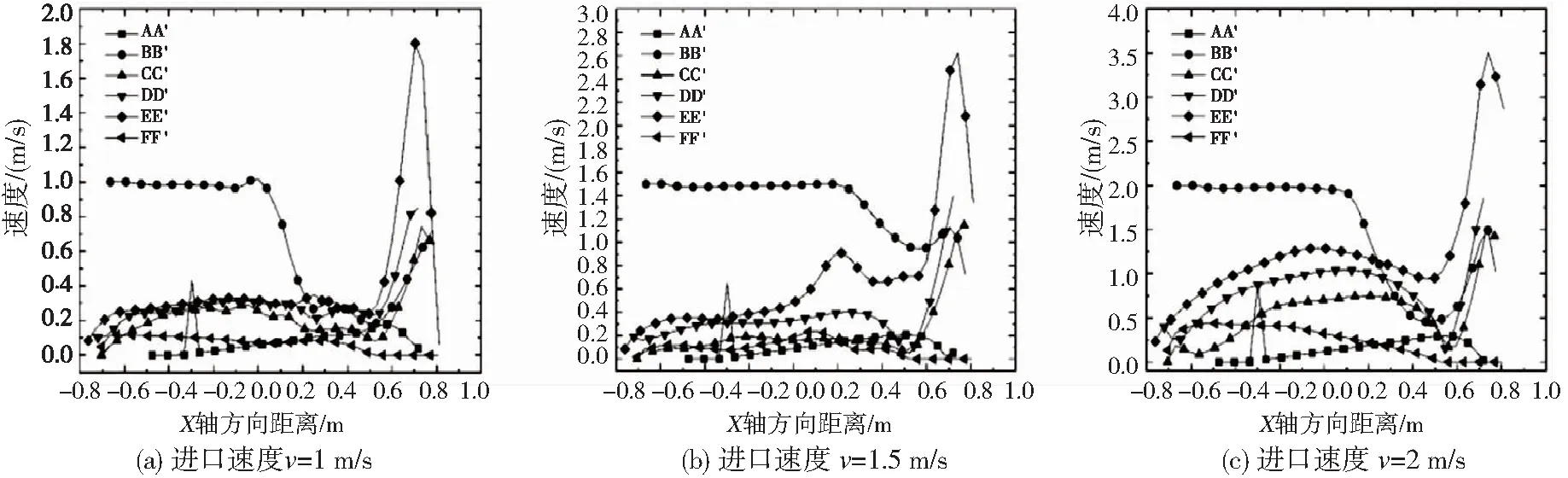
圖7 監測線上速度分布曲線
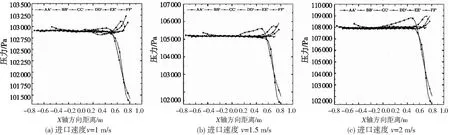
圖8 監測線上壓力分布曲線
計算結果顯示:監測線BB’上速度相對較大,從進水口到監測線中部,速度基本穩定不變速度大小近似等于進水口速度,在中后段逐漸減少,到右端突然增加后又減少;當速度為1 m/s時,監測線AA’和FF’上從左端到右端,速度先增加后減小,監測線CC’、DD’、EE’上從左端到右端,速度先增大后減小,靠近右端又突然增加;當速度為1.5 m/s和2 m/s時,檢測線EE’上的速度大小與BB’趨勢一致;隨著進口速度的增加,吸魚泵頂部和底部的監測線AA’、FF’上的速度分布相對穩定,基本上不隨著X距離變化發生改變,但吸魚泵內部檢測線BB’、CC’、DD’上的流速逐漸增加,監測線EE’上的流速線增加后又急速降低。
吸魚泵內部壓力分布是評估活魚運輸過程中魚體損傷的一個重要標準。不同來流條件下監測線上壓力分布曲線如圖8所示。計算結果顯示:不同進口速度下,AA’、BB’、CC’、DD’、EE’、FF’6條監測上的壓力變化趨勢基本一致;X=-0.8~0.5范圍內,檢測線AA’、BB’、CC’、DD’、EE’、FF’上壓強變化不明顯;在X=0.5~0.8范圍內,檢測線AA’、BB’、CC’、DD’上的壓強逐步增加,最大值約為1.09×105Pa,檢測線EE’、FF’上的壓強急劇降低,最小值約為1.0×105Pa;計算結果顯示靠近出水口壓力相對不大,而靠近吸魚泵右上端壁面附近壓力較大,可能與來流沖擊形成回流,流動紊亂,導致附近壓力場局部變大,這為吸魚泵后續的研發和設計提供了重要的依據。
2.3 吸魚泵內監測點上的流動特性分析
為進一步研究吸魚泵內部流動特性隨時間變化的關系,在吸魚泵內部取適當的點進行監測如圖3所示,并提取該點上的相關流動特性參數,如速度、壓力以及渦流黏度。以流動時間作為橫坐標,將該曲線上的速度、壓力、渦流黏度作為縱坐標得到該線上的速度特性、壓力分布特性、渦流黏度特性。
在不同進水速度情況下,不同監測點上的速度分布如圖9所示,從計算結果可以得出吸魚泵出水口監測點5上的流速相對較大,其他測點上的速度大小差異不大;隨著進口速度的增加,各個監測點上的速度隨之增加;從流動趨勢來看,各個監測點上的流速相對穩定,未出現較大的波動,速度隨著時間的增加,基本是先增加,后減少,逐步趨于穩定。
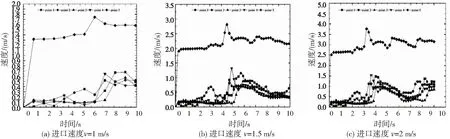
圖9 監測點上速度分布曲線
在不同進水速度情況下,不同監測點上的壓強計算結果如圖10所示,計算結果顯示吸魚泵出口處監測點5壓強相對較小,其他監測點處的壓強相對較大;隨著時間的推移,各個監測點上的壓強先急劇增加,后趨于穩定;隨著速度的增加,各個監測點上的壓強隨之增大,出口處壓強基本維持在1.010×105~1.035×105Pa。
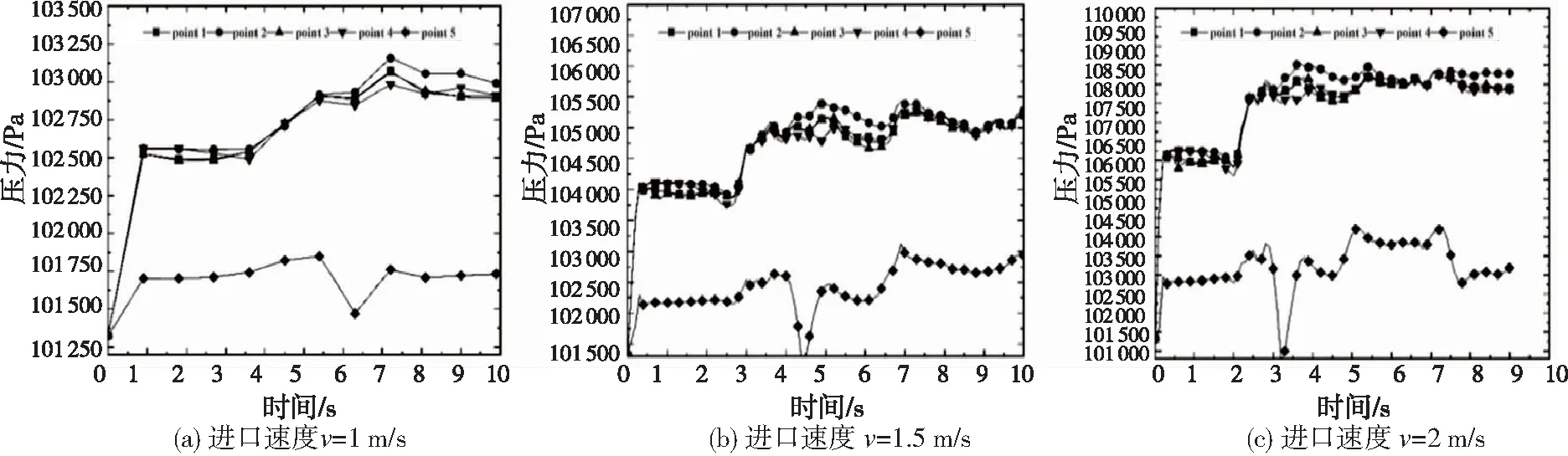
圖10 監測點上壓強分布曲線
渦流黏度是表征湍流特性的一個重要參數,與流動的紊動特性緊密相關。渦流黏度的計算結果如圖11所示,可以看出監測點4的渦流黏度相對較大,其次是監測點3和監測點5,監測點1和監測點2的玩渦流黏度最小。計算結果表明監測點4處的流動翁亂,這主要是該處存在明顯的回流現象;監測點1和監測點2處流速分布較穩定,波動較小,說明吸魚泵底部流動穩定,對魚體損傷較小。
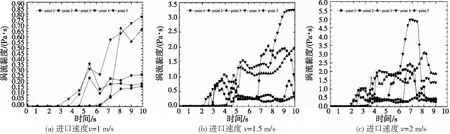
圖11 監測點上渦流黏度分布曲線
2.4 數值結果有效性驗證
樣機試驗在中國水產科學研究院漁業機械儀器研究所中試基地完成,試驗模型如圖1所示。為驗證上述數值計算的有效性,設置圖3中的監測平面上5個監測點(Point 1、Point 2、Point 3、Point 4、Point 5),其坐標分別(-0.41,0.25,0)、(-0.16,0.04,0)、(-0.3,0.5,0)、(0.2,0.32,0)、(0.7,-0.07,0)。在進口速度是1 m/s的情況下,虹吸式吸魚泵穩定工作后,采用LSH10-1M型微型多普勒流速儀測定內部的點1、點2、點3、點4、點5處的流速。
表1分別為監測點1、2、3、4、5上的數值模擬與試驗結果,可以看出監測點1處的試驗結果與數值結果誤差最大,誤差為13.3%,其次是監測點2和點4處的試驗結果與數值結果,誤差為11.9%,而監測點3和5處的試驗結果與數值結果誤差較小,分別為4.8%和3.7%。此外,可以發現點5處的流速最大,而靠近吸魚泵壁面處的監測點處流速較低,即渦流區和出水口處流速較大。試驗結果表明數值計算結果準確有效。
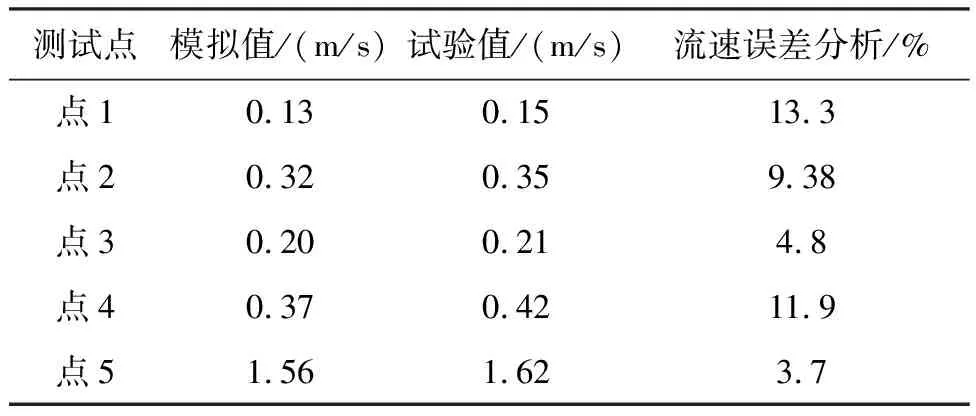
表1 平均流速數值模擬與試驗數據
3 結論
在不同進口速度下,虹吸式吸魚泵內壓強變化幅度不大,壓強最大處主要集中在吸魚泵右上端,該處對魚體損傷最大;吸魚泵內部出口側頂端的渦流黏度最大,容易形成渦流,渦流落點處容易對魚體產生二次損傷。隨著進口速度的增加,壓強、流速和渦流黏度都呈現增大的趨勢;隨著進口速度的增大,內部流場的流動紊亂程度也在增強;出水口處壓力相對不大,而靠近吸魚泵右上端壁面附近壓力較大。吸魚泵試驗結果和數值模結果最大誤差為13.3%,最小誤差為3.7%,驗證了計算結果的有效性。本研究對吸魚泵的開發和設計提供了參考,具有一定的科學意義。后續的研究中應考慮活魚對吸魚泵內流場的影響以及研究不同種類魚類對輸送性能的影響。
□
