增殖放流魚苗野化訓練裝置設計與試驗
2022-12-29 08:44:54胡慶松祖西龍陳雷雷
漁業現代化 2022年6期
胡慶松,王 熠,祖西龍,陳雷雷,李 俊
(上海海洋大學工程學院,上海 201306)
海洋牧場是指在某一海域內建設適應水產資源生態的人工棲息場,采用增殖放流和移殖放流的方法,將生物種苗經過中間育成或人工馴化后放流入海,利用海洋自然生產力并進行微量投餌育成,同時采用先進的魚群控制技術和環境監控技術對其進行科學管理,使其資源量增大,有計劃且高效率地進行捕撈[1]。人工苗種放流存活率是影響海洋牧場增殖效益的重要因素[2]。在當前海洋牧場增殖苗種培育及放流實施過程中,對于增殖目標種的野化訓練環節仍重視不足,針對批量生產增殖目標種的野化訓練技術嚴重缺乏,苗種放流后生存適應性差、放流存活率低,嚴重影響了增殖效果,成為制約海洋牧場增殖放流成效提升的主要因素之一[3-5]。
為解決以上問題,自20世紀 80 年代起,歐美地區許多發達國家已開始針對一些主要增殖種類展開研究,重點分析人工養殖苗種和野生苗種間存在的關鍵行為學模式和生理學特征差異,探討提高人工繁育苗種野外存活率的野化訓練途徑[6-12]。進入21世紀以來,以魚類社會學習能力研究為基礎的攝食-反捕食能力訓練、環境豐容技術、游泳能力訓練等行為馴化研究逐漸受到關注[13-16]。然而,從世界范圍看,盡管目前在放流苗種行為馴化理論研究方面取得了一定進展,但野化訓練技術在增殖實踐中的應用仍處于探索階段,歐美地區已有研究大多圍繞鮭科魚類開展,且以單一訓練技術試驗驗證為主[17-18]。針對捕食、避敵等方面尚未見已開展的系統化、規模化技術實踐應用。
放流后自然海域下捕食活餌和躲避敵害能力是魚苗能否生存的第一挑戰,由于食物和環境方面的明顯差異,從人工餌料直接過渡到野外環境下的活餌是一個跳躍性變化。采用人工餌料和活餌復合式進行,加入敵害進行提醒,對放流魚苗進行野化訓練,能夠有效提升放流魚苗的生存能力。
本研究提出一種增殖放流魚苗野化訓練裝置,開展承載浮體、多重避敵裝置、活餌投放裝置、能源供應系統、集成控制中心等關鍵部件的設計與選型,針對條石鯛開展捕食活餌和躲避敵害兩種野化訓練試驗并分析結果,從而驗證該野化訓練裝置的可行性。
1 整體結構設計
傳統的增殖放流魚苗野化訓練通常以人工方式增加環境豐容度或釋放活餌的單一訓練為主,就提升增殖放流魚苗的放流初期存活能力而言,存在如下問題:
(1)人工輔助野化,容易形成增殖放流魚苗對人類活動的依賴性。人工養殖階段,魚苗與人員互動頻繁,很容易使得魚苗形成“人至則食至”和在水面攝食的習慣。
(2)單一性訓練不能滿足野化種群初期存活能力影響因素的綜合性要求。海洋牧場環境復雜多變,放流魚苗進入海洋后需要面臨包括捕食有限食物和躲避多種敵害等諸多問題,僅僅針對某一方面的野化訓練不能使得魚苗在自然環境下的生存率得到有效提高。
(3)現有野化裝置常以單一功能的組件臨時搭建,集成度不夠,安裝不便,尤其是無法滿足網箱野化訓練需求,且固定式野化裝置容易使得增殖放流魚苗在野化訓練過程中形成類似馴化的條件反射。
針對以上問題,提出以下設計思路并繪制出如圖1所示的野化訓練裝置功能圖。
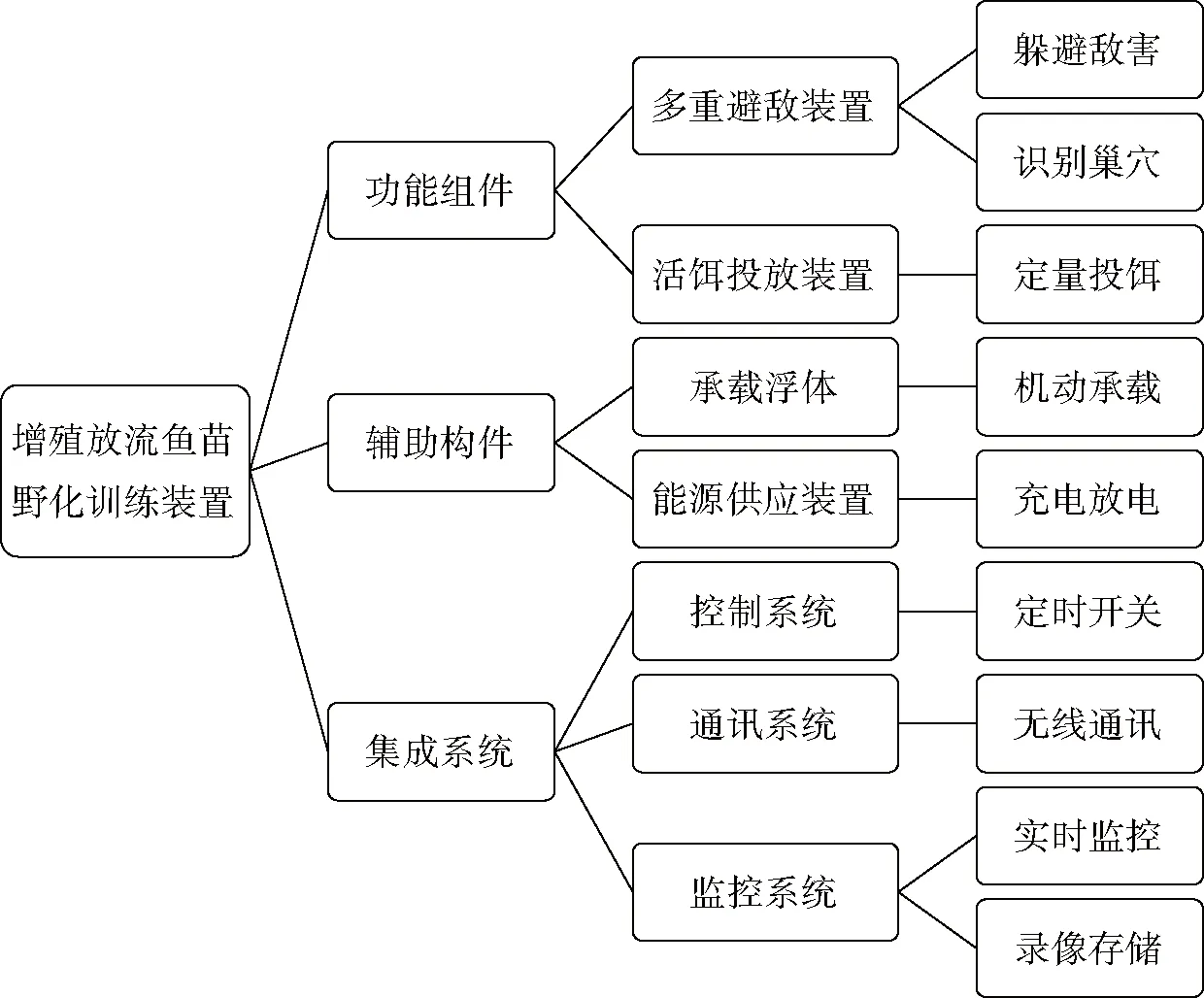
圖1 野化訓練裝置功能圖
(1)集成自動或遠程手動控制、魚苗行為觀測和遠程數據通信等功能,可實現遠程無人、自動化的野化訓練工作。
(2)綜合捕食活餌、躲避敵害兩種野化訓練方式,滿足多重野化訓練的需求。
(3)具有機動性,可以變換位置。并集成所有的功能裝置于一體,作為整體化設備適用水池的野化訓練需求。
依據上述設計思路并結合功能圖設計出的野化訓練裝置主要由多重避敵裝置、活餌投放裝置、承載浮體、能源供應裝置、集 成控制中心等組成。野化訓練裝置整體結構如圖2所示。
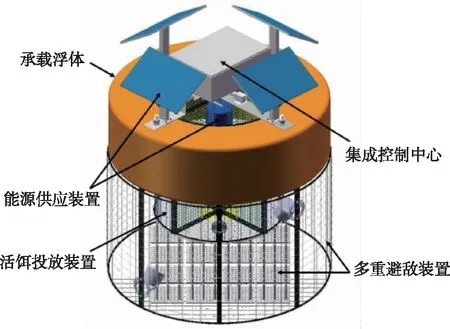
圖2 野化訓練裝置整體結構圖
2 功能組件設計
2.1 多重避敵裝置設計
2.1.1 格柵避敵裝置設計
格柵避敵裝置的設計借鑒了深水網箱養殖魚類的分級原理[19-20],這種原理是利用魚類因攝食、避敵等行為使得魚類自動游入格柵所營造的內部空間。對于野化訓練裝置來說,內部空間和外部環境天然形成了兩級格局,利用魚類體型特征與格柵間距或孔徑的關系,可以將體型特征具有明顯差異的敵害異種魚類和同種魚類分離開來,以訓練目標魚種躲避異類敵害的能力。
避敵格柵規格參數主要由受訓目標種與敵害異類的生物學特征決定。分析受訓魚苗與敵害大魚的體形差異,可以確定避敵格柵的孔徑大小。以條石鯛為例,條石鯛體長為體高的1.7~1.9倍[21]。根據國內相關魚類增殖放流技術規范[22],放流條石鯛苗種平均全長≥5 cm。而魚苗全長包括體長,由此可以推出條石鯛苗種放流的體高應大于3 cm。黑鯛屬于兇猛的肉食性、追逐捕食性魚類,且在集群捕食中表現積極,反應靈敏[23],適合作為躲避敵害訓練中的敵害魚。黑鯛成魚的體長一般在12~30 cm,為體高的2.6倍[24],可以推算出黑鯛成魚的體高約為4.6~11.5 cm。綜合作為受訓目標種的條石鯛魚苗和作為敵害異類的黑鯛成魚的體高差異,可以將避敵格柵的孔徑大小鎖定在3~4.6 cm之間。此外,由于增殖放流魚苗在放流前相互之間的體形和規格也有差異,為了初步減少魚群種內競爭與攻擊的可能,在保證有一種孔徑大小介于3~4.6 cm之間的避敵格柵的前提下,還可以增加一種孔徑大小略小于3 cm的避敵格柵。通過這種孔徑大小略小于3 cm的避敵格柵,當有體高大于這種避敵格柵孔徑的增殖放流魚苗因為饑餓等客觀原因追逐攻擊體高小于這種避敵格柵孔徑的同伴時,后者可以通過穿過避敵格柵游入內部,而前者被阻擋,那么后者就可以為自己贏得一定的躲避時間,這也在另一方面體現了避敵格柵的分級原理。
2.1.2 仿巖礁巢穴裝置設計
多數增殖放流魚種,如大黃魚、黑鯛、條石鯛、皇姑魚等,具有戀礁性。因此,模擬巖礁、巢穴等環境可以訓練增殖放流魚苗尋找、識別巢穴和躲避同伴攻擊的能力。仿巖礁巢穴裝置的外形與釘板類似,將兩端倒有圓角的多個柱子安插在平板上,并整體安裝在格柵避敵裝置的底部圓形格柵內側。
2.1.3 多重避敵裝置整體結構設計
格柵避敵裝置和仿巖礁巢穴裝置組成多重避敵裝置,其整體結構三維建模圖如圖3所示。
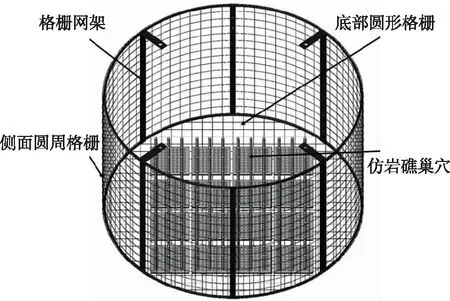
圖3 多重避敵裝置的三維建模圖
2.2 活餌投放裝置設計
2.2.1 結構與空間設計依據
活餌投放裝置的結構與空間設計主要以活餌投喂量、暫養密度為考量。活餌投喂量過大,可能會給增殖放流魚苗造成一種“食物供應充沛”的假象,不利于訓練其捕食活餌的能力。活餌的暫養密度過大,會加劇活餌爭奪有限空間,競爭生存,導致存活率降低[25]。綜合以上因素,結合實際訓練要求,設計出如圖4所示的活餌投放裝置。
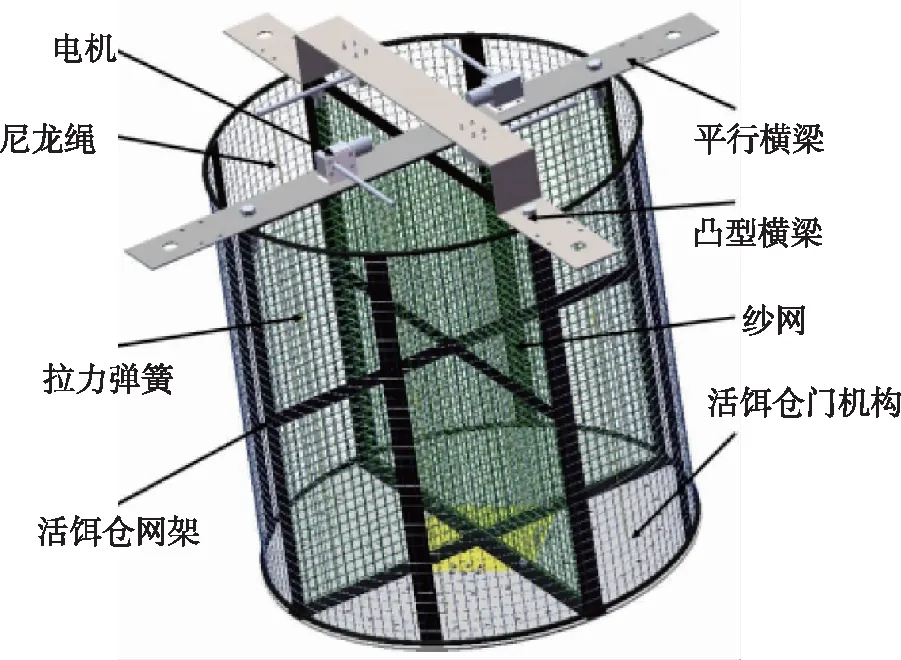
圖4 活餌投放裝置的三維建模圖
2.2.2 倉門運動機構設計
活餌投放裝置主要由活餌倉網架、活餌倉門機構、紗網、凸型橫梁、平型橫梁、電機、尼龍繩、拉力彈簧等組成。活餌倉網架呈圓柱狀,內部有3個十字形網架。為實現活餌定量投放功能,將紗網安裝在活餌倉網架的外側和十字形網架上將料倉分成四等分。活餌倉門機構包括四扇倉門,安裝在最下側的十字形網架上。電機和活餌倉門分別綁接一段尼龍繩,兩段尼龍繩之間以拉力彈簧相連接。拉力彈簧用于緩沖尼龍繩對電機軸的施力負擔,防止開閉倉門時間過長而造成尼龍繩繞組拉彎電機軸。安裝在平行橫梁和凸型橫梁上的電機通過拉力彈簧和兩段尼龍繩與倉門相連接。若尼龍繩繞組為順時針方向,當電機通電并順時針轉動時,活餌倉門因材料密度大于海水密度而開啟,反之則關閉。
2.2.3 倉門驅動電機轉速的確定
倉門開閉時間可以為定時開關模塊設定時間提供依據,而電機轉速的選擇關系到倉門開閉時間的設定。倉門開閉如圖5所示。
圖5 倉門開閉示意圖

(1)
(2)
(3)
式中:Δl為尼龍繩的伸長量,mm;l為尼龍繩在倉門關閉狀態下的長度,mm;d為倉門門軸到尼龍繩結點的距離,mm;Δθ為設定的最大開門角度,(°);N為尼龍繩在電機軸上的繞組圈數;c為電機軸橫截面的圓周長,mm;t為倉門開閉所需的時間,s;nr為電機轉速,r/min。
假設尼龍繩處于繃緊拉直狀態,拉力彈簧處于原長狀態。為了減少倉門開閉過程中對魚苗和活餌的影響,倉門的運動幅度不宜過快過大,故設定最大開門角度Δθ=45°,時間t=5 min。根據公式(1)~(3),求得電機轉速nr約為0.6 r/min。選擇額定電壓為12 V,額定轉速為0.6 r/min的直流蝸輪蝸桿減速電機作為倉門驅動電機。
3 輔助構件設計
3.1 承載浮體設計
3.1.1 承載浮體設計原則
為滿足裝置的機動性要求,采用一種浮體,由浮體提供浮力,使得裝置的一部分可以浮于水面,便于根據需要改變所處位置,避免增殖放流魚苗在野化訓練過程中形成類似馴化的條件反射。以近海小型海洋浮標標體為母型,進行浮體的結構形式和規格尺寸的設計,開展相關數據的計算,并科學選材進行加工。
在承載浮體概念設計階段需要滿足以下兩個基本原則:
(1)浮體所提供的浮力能與整套野化訓練裝置所受重力相平衡。根據野化訓練裝置的功能設計要求,預估包括浮體在內的所有組件的重量為浮體的結構形式和規格尺寸的設計提供依據。
(2)浮體所營造的空間充足。在初步滿足所有組件裝載的基礎上仍留有一定的空間余量。
3.1.2 結構形式與規格尺寸確定
海洋浮標標體的結構形式有圓盤形、船型、環形、球形、柱形等。圓盤形浮標和球形浮標具有有效面積和空間利用率較高、穩定性較好、能夠抵抗惡劣的海洋環境、易于布置投放、運輸方便等特點,且這兩種浮標結構對稱、生產制作成本較低。然而,由于球形浮標在垂蕩方向上的隨波性較好,通常僅用于波浪測量。船形浮標呈流線型,在縱向上的標體結構較長,因此具有不易傾覆、抗風浪能力較強、拖曳運輸方便的特點,但其造價相對較高。柱形浮標吃水量較大,且通常需要水下浮標作為輔助[26-28]。
為充分利用浮體空間,便于數據采集、控制、通訊、能源供應等設備或系統的安裝與使用,結合該野化訓練裝置在水池或網箱的應用實際,參考現有海洋浮標標體的結構形式,設計一種環形圓柱承載浮體。這種浮體結構簡單、制作容易,且其所營造的空間可以得到充分利用。
考慮到增殖放流魚苗和活餌的規格、數量等因素,本次設計的浮體的規格尺寸為外圈直徑1 m、內圈直徑0.6 m、高度0.3 m、外圈上下兩端圓角半徑0.02 m、圓環上的4個通孔直徑0.021 m。
根據以上設計尺寸,取圓周率π=3.14,則該浮體的體積約為0.149 8 m3。
3.1.3 浮性分析
浮體的規格尺寸決定了其自身的最大排水量,從而決定了其所能夠提供的最大浮力的大小。根據阿基米德原理,
F=ρVg
(4)
式中:F為浮體所能提供的最大浮力,N;ρ為浮體排開水的密度,kg/m3;V為浮體排開水的體積,m3。
海水密度一般在1.02×103~1.07×103kg/m3之間,取ρ=1.02×103kg/m3,g=9.8 N/kg,則求得該浮體所能提供的最大浮力F約為1 497 N。
根據表1所提供的總質量,求出該野化訓練裝置的總重量G為539 N。
表1 野化訓練裝置各組件的質量
從而得到F>G,說明該浮體承載后仍然能夠使得裝置的一部分浮于水面。
3.1.4 選材與工藝
海洋浮標標體一般是由鋼板制成,將所需功能裝置集成在標體上。然而,選用鋼制材料需要考慮包括防護在內的許多問題。因此,本設計采用具備眾多優良特性的EVA材料。EVA抗菌能力強、無毒、無味、無污染,具有密閉泡孔結構,防潮不吸水,抗海水腐蝕能力強。由于其韌性好、回彈性高和抗張力強,具備良好的減震緩沖性能。它還擁有良好的隔熱、保溫防寒性能,可應用于嚴寒和曝曬場合[29]。
此外,為進一步增強承載浮體的防海水腐蝕能力,在EVA材料表面噴涂聚脲酯,形成具有一定厚度的聚脲涂層。相對于傳統有機涂層材料,聚脲材料擁有低溫韌性好、防腐、耐磨、抗濕滑、耐老化、抗熱沖擊、耐介質、固含量高等優異的物理化學性能[30]。問世以來,被廣泛應用于防水防滲、防腐耐磨等工程防護領域[31]。
綜上所述,聚脲涂層EVA材料承載浮體可以同時適應水池和近海網箱的復雜環境。
3.2 能源供應裝置設計
由于水池和網箱占有一定的面積,尤其在占地面積比較大的網箱中,從陸地搭接電纜需要考慮的因素較多,也不利于裝置位置的大范圍調整,甚至可能會對增殖放流魚苗的野化訓練效果造成不小的影響,充分利用太陽能這類可再生資源供應能源很有必要,故采用蓄電池與太陽能板相結合的方式實現各個用電設備與系統的連續供電。在承載浮體上側的兩個橫梁上安裝了4塊太陽能板,太陽能板的功率根據野化訓練裝置的總體布局和設備用電情況確定。同時,為充分利用活餌投放裝置的冗余空間,設計一種隔水密封蓄電池,將12 V鋰電池放入與之尺寸規格相匹配的PVC管中,用兩個PVC內堵頭加蓋封裝,并在其中一個堵頭中心處打孔穿線,使用帶密封圈的金屬螺紋堵頭擰緊。
4 系統集成設計
4.1 控制系統設計
為實現自動化的綜合野化訓練工作,設計控制系統,實現對活餌投放裝置、監控系統、通信系統等裝置或系統的自動運轉,同時預留遠程手動控制功能,便于變更工作計劃。控制系統主要由三個定時開關模塊和一個充放電模塊構成。通過與定時開關模塊相匹配的智能手機應用程序,實現遠程手動控制功能。充放電模塊選用太陽能充放電控制器,定時開關模塊選用Wi-Fi四路智能時間控制器。太陽能充放電控制器連接與控制太陽能板、蓄電池、負載三路,具有短路保護、過充保護、過放保護、開路保護、充電過熱保護、防反接保護等功能,可以有效保護整體電路的安全與穩定。Wi-Fi四路智能時間控制器作為電子設備的定時開關,可以通過Wi-Fi網絡和智能手機應用程序遠程設置實現設備開關時間控制功能,具體設置如表2所示。
表2 定時開關模塊各路功能簡介
3個定時開關模塊各路的功能簡介如表2所示。二號定時開關模塊主要是通過控制電機電路的正負極轉換以實現電機的正反轉控制,控制原理電路圖如圖6所示。
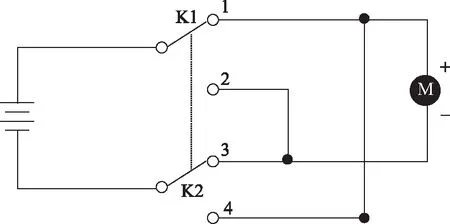
圖6 采用正負極性轉換開關構成的簡單正反轉控制電路
4.2 通信系統設計
構建通信系統,可以實現裝置自動控制的設定、遠程手動控制操作、魚苗行為的實時觀測等功能。通信系統的載體是無線通信模塊,在此選用移動路由作為無線通信模塊。移動路由建立了用戶與定時開關模塊、錄像存儲模塊之間的無線通信。通過定時開關模塊相關智能手機應用程序,可以遠程使用定時開關模塊以便控制相關設備的啟停或正反轉控制。移動路由與定時開關模塊兩者相互作用。移動路由為定時開關模塊提供網絡通信,定時開關模塊控制移動路由的電源通斷。
4.3 監控系統設計
在增殖放流魚苗野化訓練過程中,需要對格柵避敵裝置、仿巖礁巢穴裝置和活餌投放裝置進行監控,確認各功能裝置運轉正常,同時觀測魚苗行為,以便分析野化訓練裝置的野化效果。監控系統主要由錄像存儲模塊、兩個水下攝像頭和一個水下補光燈組成。錄像存儲模塊選用網絡硬盤錄像機。網絡硬盤錄像機作為遠程監控的媒介,采用POE傳輸技術,同時解決了供電和網絡問題,其與水下攝像頭、通信系統連接,通過與錄像存儲模塊相匹配的智能手機應用程序,用戶可以在線觀看水下攝像頭的實時監控錄像。此外,由于供應能源的隔水密封蓄電池額定電壓為12V,采用“12V24V轉48V3A升壓模塊(非隔離)”類型的DC-DC直流電源轉換器為額定電壓為48V的網絡硬盤錄像機供電。
4.4 集成控制中心設計
為實現野化訓練裝置定時定量投放活餌、實時觀測魚苗行為并錄像保存等功能,將定時開關模塊、無線通信模塊、充放電模塊、錄像存儲模塊集成于防水控制盒中作為集成控制中心,以實現野化訓練裝置的自主運行,避免人為因素對野化訓練工作的干擾。
集成控制中心如圖7所示。
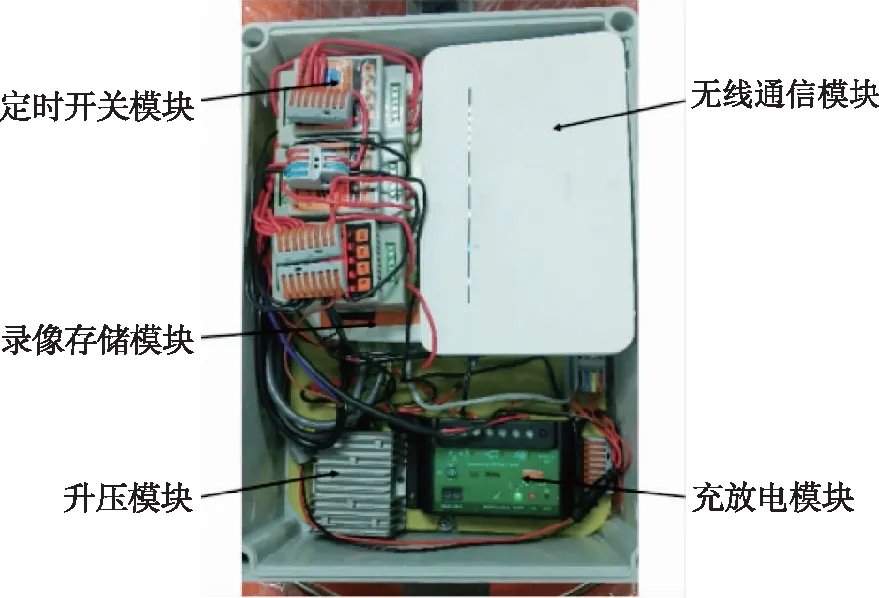
圖7 集成控制中心實物圖
5 驗證試驗與效果分析
5.1 模擬生境構建
為了驗證野化訓練裝置的有效性,于2021年夏季在浙江省舟山市西軒漁業科技島對條石鯛魚苗開展了野化訓練試驗。試驗水池規格尺寸為5 m×5 m×1.2 m,容積為30 000 L。試驗設置兩個水池,野化池和對照池。每個水池各投放2 500尾條石鯛魚苗。野化池投放野化訓練裝置和4個規格不一的簡易封閉輔助格柵,對照池不做任何處理。簡易封閉輔助格柵選用綠色2.5 cm正六邊形孔絲網和3.3 cm正方形孔加厚2.2 mm聚乙烯平網,不僅可以起到躲避異類的作用,還能達到分級躲避同類大魚的效果。如圖8所示為野化池中的野化訓練裝置和簡易封閉輔助格柵。
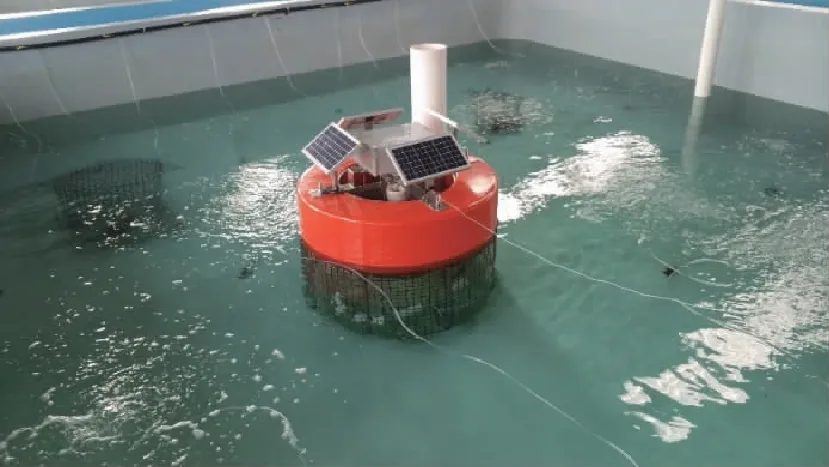
圖8 野化池中的野化訓練裝置和輔助格柵
此外,為了更好地觀察記錄本次試驗中野化訓練裝置的實際效果,在野化池和對照池斜上方分別安裝了一臺POE球形攝像頭并配備了與之相連的網絡硬盤錄像機用于實時錄像。在場地內安裝了一臺信號放大器用于解決移動網絡信號問題。
5.2 野化訓練方案
5.2.1 捕食活餌訓練方案
根據條石鯛以無脊椎動物或附著于巖礁上的生物為食的特性,初步選擇試驗場地及其附近較易獲取的脊尾白蝦作為條石鯛捕食活餌訓練用的活餌。
脊尾白蝦為熱溫帶海域底棲蝦類,對環境適應性廣,可在2~38℃的水中生活,最適生存溫度為27.0~29.6 ℃[32],能夠在條件簡陋的水池和活餌倉中短期存活,可以作為捕食活餌訓練中的活餌。
野化池和對照池每天均投喂4次餌料。野化池每次投放人工餌料時的投喂量與對照池相同。為使訓練更加貼近自然狀況,并考慮到成本因素,活餌投放沒有固定的時間和次數。
5.2.2 躲避敵害訓練方案
躲避敵害訓練流程圖如圖9所示。
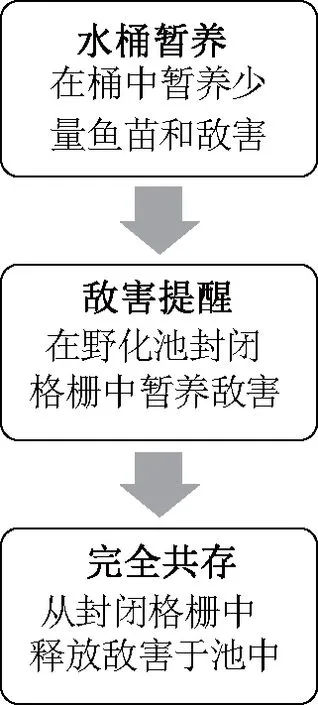
圖9 躲避敵害訓練流程圖
黑鯛成魚來源于近期海釣,水桶暫養環節所用條石鯛均從野化池中隨機撈取。
5.3 訓練效果與指標分析
5.3.1 捕食活餌訓練效果
觀察發現,經過15 d的捕食活餌訓練,條石鯛對脊尾白蝦從一開始的試探攻擊,到群起而攻之,再到“迫不及待”沖進活餌倉搶食,連蝦殼都不剩。有時甚至會在倉門沒有開啟的情況下,透過倉門的小孔,在活餌倉外啄食恰好躺在門孔上的脊尾白蝦。
5.3.2 躲避敵害訓練效果
在訓練初期的水桶暫養環節中,條石鯛與黑鯛之間均存在試探性攻擊對方的行為,但雙方均沒有表面傷痕。到了訓練中期的敵害提醒環節,封閉在格柵中的黑鯛與水池中的條石鯛魚苗互動明顯,但最終死亡。撈出并觀察該死亡黑鯛,發現其魚體僵硬且表面多處有傷痕。結合現場觀察分析認為封閉格柵限制了黑鯛的活動,而條石鯛以壓倒性的群體優勢,不斷攻擊黑鯛,最終導致黑鯛死亡。于是,在訓練后期的完全共存環節中,又投放了黑鯛2尾。1 d后黑鯛1尾死亡,但另1尾表現正常,分析認為前者可能為不適應環境的個體。存活的那一尾黑鯛時常追逐條石鯛魚群,部分條石鯛能夠借助避敵格柵躲避。
5.3.3 基本生長指標對比
魚苗全長和體質量兩個基本生長指標的變化可以在一定程度上體現魚苗身形的變化。為測定基本生長指標,在野化訓練初期和末期各采樣一次,兩次采樣間隔12 d,每次撈取野化池和對照池魚苗各50尾。魚苗基本生長指標對比如表3所示。
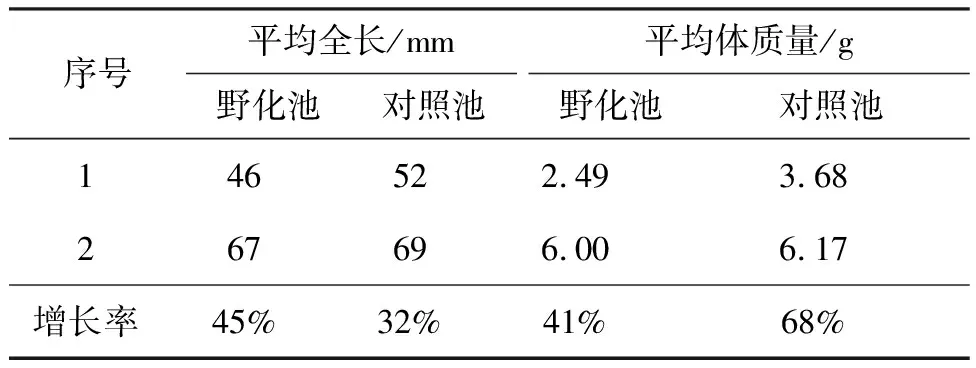
表3 魚苗基本生長指標對比
分析表3中的數據可見,野化池魚苗相對于對照池魚苗,全長增長率較高而體質量增長率較低。結合現場觀察,野化池魚苗相對于對照池魚苗活動次數多、時間長,因此,體長增長快和體質量增長略慢,但生長正常,攝食積極。野化池魚苗瘦長體型正說明了其較強的活動和攝食能力。
5.3.4 魚苗死亡情況對比
在試驗過程中難免會出現部分魚苗死亡的現象。死亡魚苗的表面特征情況的分類統計如表4所示,野化池與對照池魚苗死亡數量統計如圖10所示。
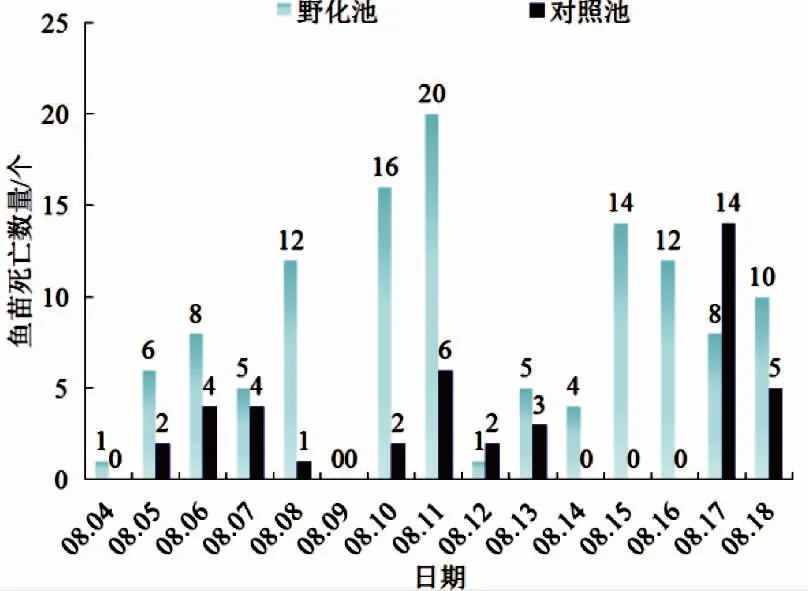
圖10 魚苗死亡數量統計圖
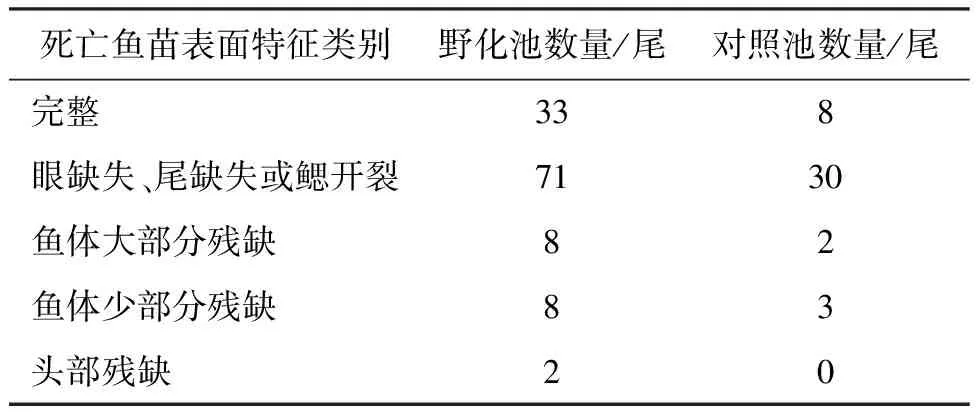
表4 死亡魚苗的表面特征情況的分類統計
分析表4中死亡魚苗的表面特征情況,發現超過半數的死亡魚苗為眼缺失、尾缺失和腮開裂,而野化池中的魚苗除了眼缺失、尾缺失和腮開裂外,還有一定數量的死亡魚苗魚體殘缺,野化池中更有2尾死亡魚苗頭部殘缺,據此可以推斷為受到同伴激烈攻擊,顯示了存活魚苗較強的攻擊能力和攻擊性。
從圖10可以看出,除8月9日和8月17日以外,幾乎每天野化池魚苗的死亡數量都比對照池要多。對比野化池與對照池魚苗死亡的數量和表面特征,可以分析出受訓魚苗攻擊性強。
6 結論
針對海洋牧場增殖放流苗種的適應性和放流存活率不高的問題,設計了一種增殖放流魚苗野化訓練裝置,實現了機動化、自動化的多重野化訓練工作。利用野化訓練裝置針對條石鯛魚苗開展捕食活餌訓練和躲避敵害訓練試驗。試驗表明,在選定的野化訓練模式下,可在一定程度上實現條石鯛魚苗行為特征的改善,同時驗證了增殖放流魚苗野化訓練裝置的可行性。
□
