基于DK算法的石化企業滅火救援路徑優化技術
2022-12-28 11:21:24張建軍
中國新技術新產品 2022年19期
張建軍
(青島消防救援支隊,山東 青島 266000)
石化企業發生火災將會危及人民生命和財產安全,必須進行及時有效的救援。從實際情況看,石化企業的火災成因復雜、燃燒物質種類繁多并伴有爆炸等其他危險,導致救援工作困難[1]。同時,石化企業廠區內道路網絡的復雜性,也進一步增加了救援難度。因此,要完成石化企業火災的救援工作,首先要制定合理的救援路線,確保救援隊伍和救援設備能夠安全可靠、快速及時地到達救援現場[2]。在火災現場中,救援路線可能由多個方案組成,哪一個方案更合理就需要通過路徑優化技術來搜尋[3]。該文針對石化企業的救援問題特點,建立一種基于DK算法的救援路線優化方法。
1 基于DK算法的路徑規劃
石化企業的火災救援路線的最佳選擇,最重要的指標之一就是可以使救援總路徑最短,從而提升救援效率。而DK算法就是一種最有針對性的最短路徑搜索算法。DK算法的基本原理是,按照決策樹的理論構建搜索救援的路徑樹,路徑樹的根節點應該滿足到達其他節點的路徑之和最短。
DK算法的具體實現過程如下:構建一個節點集合,并用S表示這個集合。在DK算法的初始狀態下,S中就有一個節點,這個節點用v0表示。隨著DK算法的搜索過程展開,不斷會有新的路徑搜索結果產生。設一條路徑可以用其經歷的節點集合為(v0,…,vk),那么就可以將vk添加到集合S中。按照這樣的辦法搜索到所有路徑之后,全部節點都會納入集合S中。
對找到的每條路徑的長度,可以用下面的方法表示第k條最短路徑,如公式(1)所示。

式中:參數dk為最短路徑的長度,函數min{}為求取集合中所有元素的最小值,參數di為所有可能路徑的長度,參數vi為節點集合中第i個節點,它可以是集合S中除去v0以外的任意一個節點。
隨著搜索深度的增加,原有路徑會有新的節點加入,使路徑長度進一步延伸。當一個新的路徑終點vk進入節點集合S以后,那么任意一條原有路徑di應該按照下面的方式進行長度上的更新處理,如公式(2)所示。

式中:參數(vk,vi)為節點vk到節點vi的弧的長度,參數c(vk,vi)則為節點vk到節點vi的弧上的權重大小。
根據有向圖理論的最小權重值路徑搜索策略如下。
第一,對最短路徑長度的上界進行處石化處理,如公式(3)~公式(5)所示。

式中:參數d(v)為已經搜索到的全部路徑的最短長度的上界,參數k(v)是設定的一個BOOL型變量,只有真(True)和假(false)兩種取值,參數p(v)為一個定點的向后方向上的指針。
第二,不但執行對k(v)= 的掃描處理,計算其中的節點,是否會出現一個能夠計算出新的最小長度的節點,如果可以得到,將其記錄下來d(v)。
第三,與第二步相同的操作在相鄰節點w上執行,即對k(w)=flase掃描處理,計算其中的節點,是否會出現一個能夠計算出新的最小長度的節點,如果可以得到,將其記錄下來d(w)。如果d(w)滿足如公式(6)所示的條件。

則更新d(w)和p(w)。
第四,不斷執行第二步和第三步,當k(v)=true是搜索過程結束,此時找到的路徑即為優化后的最短路徑。
2 DK算法的改進策略
2.1 DK算法的局限性
DK 算法的局限性有以下2點:第一,最短路徑一般是基于單一條件限制下的最短,這時DK算法是有效的。但是,很多情況下最短路徑的限制條件,同時包括多個指標,包括距離、時間、費用等。石化企業的救援工作中,這種路徑的最短判定就包括更多因素。第二,DK算法的靈活性稍差,對一些突發情況難以應對。而石化企業的火災救援,卻經常會出現突發情況。
2.2 DK算法的改進
為了解決DK算法的局限性問題,也為了更好地解決石化企業的火災救援問題,該文在DK算法的常規執行框架下,提出兩點改進策略。
第一,同時進行正向和反向搜索,其策略如圖1和圖2所示。
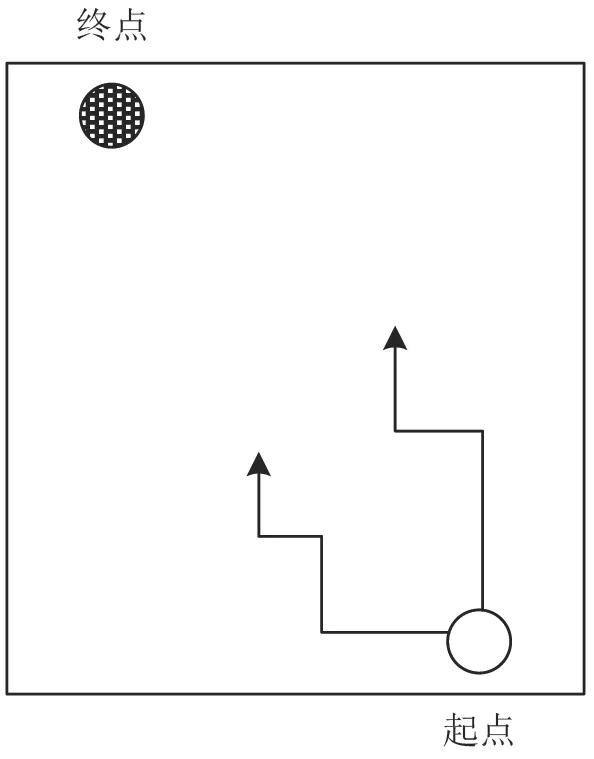
圖1 DK算法的正向搜索策略
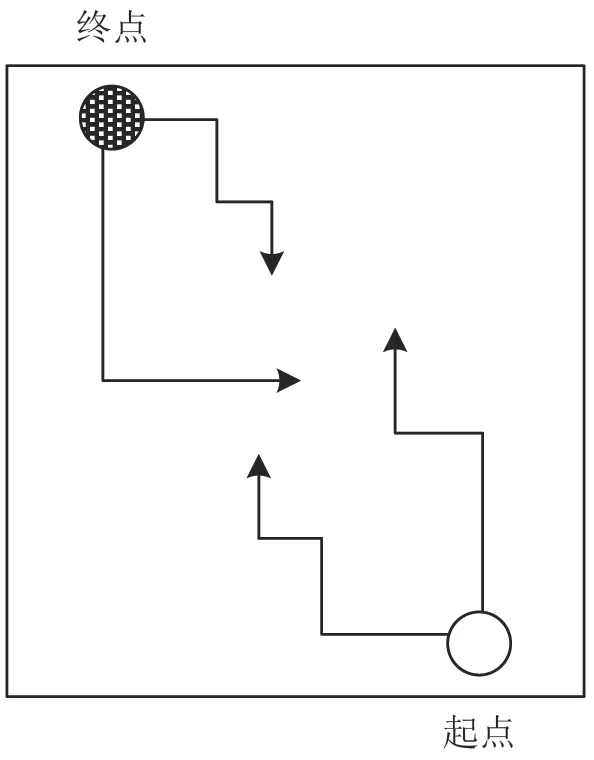
圖2 同時進行正向和反向搜索的改進策略
圖1和圖2中,方框區域代表了石化企業火災現場救援區域,白色圓點代表了救援路徑搜索的起點,黑色圓點代表了救援路徑搜索的終點,黑色實線代表了搜索路徑和可能的搜索方向。
對DK算法而言,最優路徑的常規搜索策略,就是從起點開始,按照DK算法的搜索規則,一邊尋找可能的路徑一邊比較,直至找到一條到達終點的最短的路徑。這種情況如圖1所示。為了提高搜索效率并更好地滿足多車輛協調救援任務的全局性要求,該文提出同時進行正向和反向搜索的改進策略,如圖2所示。從圖2可以看出,在DK算法的既定搜索規則下,最優路徑同時從起點和終點開始進行搜索。從起點開始的搜索目標點是終點,這一搜索是正向搜索。從終點開始的搜索目標點是起點,這一搜索是反向搜索。同時進行正反向搜索,不僅提高了搜索效率,也可以在最優路徑之后提供更多的次優路徑被選,在多車輛集體救援時,可以根據優先級將最優路徑、次優路徑分別配置給各個車輛。
第二,對大場景的復雜區域,執行分區域搜索,其策略如圖3所示。
圖3中,外部的矩形框表示了整個的大場景復雜區域,其內部又被分割成4個小的區域,每個區域都有一些白色的圓點,這些圓點代表了分區域內的關鍵點,即救援路徑必須經過的點。因為救援區域的場景大并且內部情況復雜,直接從起點到終點或者直接從終點到起點的路徑搜索都會比較困難。為此,提出的分區域搜索策略,是將原始區域進行區域分割,形成一個個更小的區域。在每個小區域內,根據關鍵點必須經過的原則,在關鍵點之間執行路徑搜索。在每個小區域內的局部路徑確定后,再使各個區域之間的路徑連接,從而形成完整的最優救援路徑。

圖3 大場景復雜區域的分區域搜索策略
通過以上兩種改進措施,可以有效地解決DK算法的局限性,提升其靈活性、改善其全局最優的搜索性能。
3 石化企業火災救援路徑優化仿真試驗
為了驗證該文方法對石化企業火災救援的有效性,接下來以仿真試驗的形式對DK算法的救援路徑優化性能進行驗證性試驗。
試驗過程中,仿真試驗所有的計算機配置情況如下:計算機的CPU為雙核多線程處理器,單核主頻為3.0GHz,計算機的內存大小為16GB,計算機的硬盤大小為500GB。仿真試驗所使用的軟件環境為MapX平臺,這一平臺專門為路徑優化算法的驗證試驗提供試驗環境。
首先,執行該文改進的DK算法,在石化企業復雜場景的模擬火情場地下進行救援路徑搜索試驗,分別得到最優救援路徑和兩個次優救援路徑,救援路徑規劃的試驗結果如圖4所示。
在圖4中,石化企業的整個火災火場模擬區域設定為400個柵格大小,x方向上配置了20個柵格長度,y方向上配置了20個柵格長度。在這個400個柵格大小的火場區域上,救援車輛的起點位于x方向上位置為1、y方向上位置為20的柵格處,救援車輛的終點位于x方向上位置為18、y方向上位置為1的柵格處。從視覺效果上,救援車輛的起點位于場景中的左上方,終點位于右下方。同時,火場區域內有多個形狀各異的障礙物干擾,障礙物所在位置設定為背景為叉剖面線的柵格區域,這些模擬障礙物在實際中可能對應著石化企業的廠房、儲罐、原材料堆放區域等。
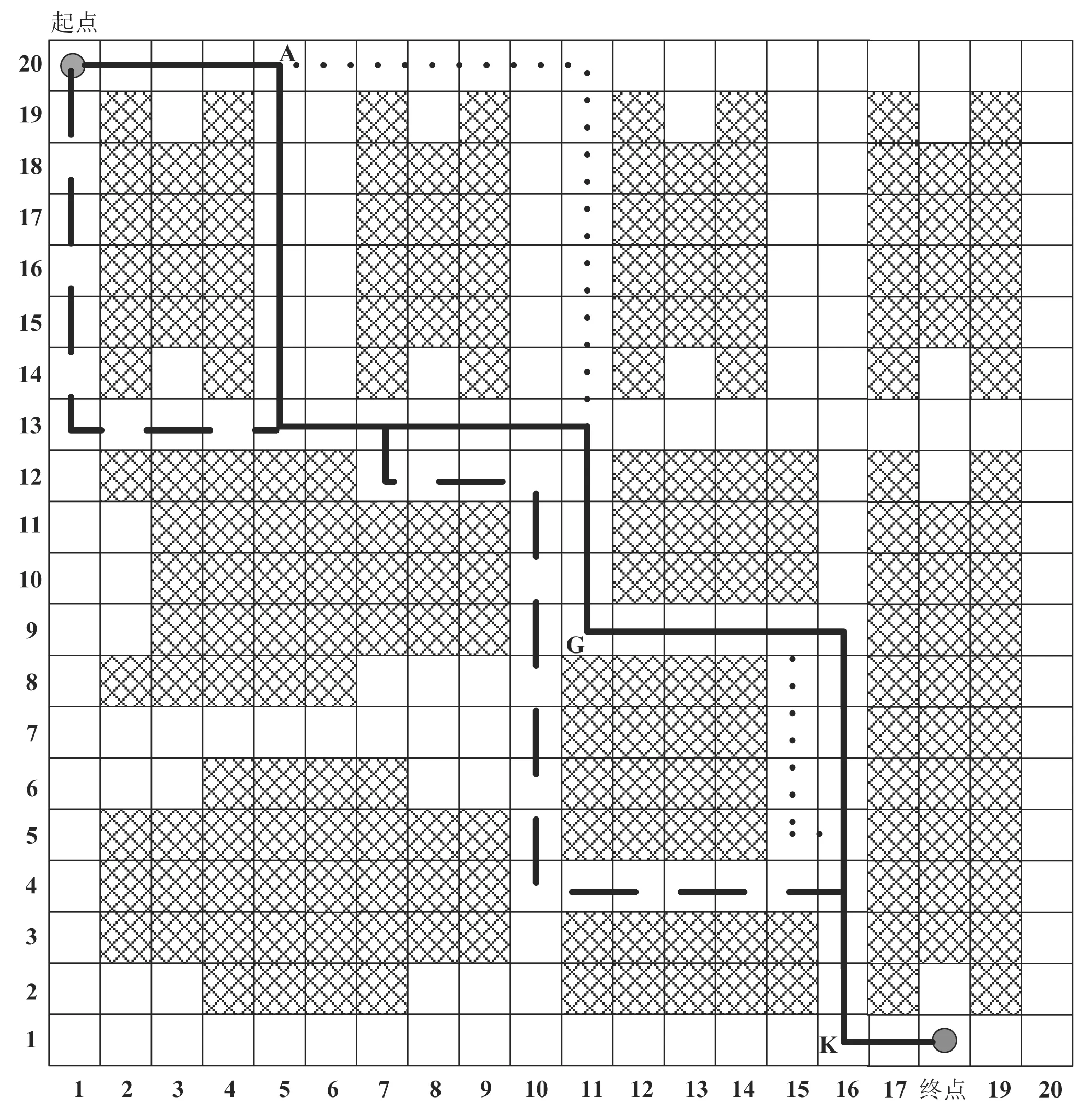
圖4 應用該文提出的改進DK算法進行的石化企業火災救援路徑規劃仿真試驗結果
圖4中,DK算法一共搜索到1條最優路徑,如圖中的黑色粗實線所示。同時,DK算法還搜索到2條次優路徑,如圖中的黑色粗虛線和黑色粗點線所示。三條路徑都存在相互的重疊區域,全部以黑色粗實線覆蓋。從DK算法的規劃結果可以看出,最優次優路徑都有效地避開了障礙物,并從起點順利到達目標終點。
為了將該文采用的改進DK算法與傳統 DK 算法進行對比,將另一組試驗結果展示為表格形式,見表1。

表1 該文改進DK算法和傳統DK算法的性能對比
表1中分別說明了石化企業14組火災救援的模擬任務,對傳統DK算法和改進DK算法分別比較了路徑規劃時間和規劃出的路徑長度。從兩項參數的對比結果可以明顯看出,該文提出的改進DK算法,完成路徑規劃的時間更少,并且規劃的最優路徑更短。該結果說明了該文提出的改進DK算法對火災救援的有效性,可以應用于石化企業的火災救援工作。
4 結論
該文針對石化企業火災救援難度大的問題,提出一種基于改進DK算法的救援路徑規劃方法。首先,介紹了傳統DK算法的實現原理和操作流程。其次,分析了傳統DK算法的局限性,提出了正方向搜獲和分區域搜索的改進策略,提升了DK算法的靈活性和全局尋優性能。最后,在Mapx仿真環境下,針對石化企業火災救援場景進行模擬,并分別采用傳統DK算法和改進DK算法進行最優路徑規劃的對比試驗。試驗結果表明:該文提出的改進DK算法得到的最優路徑更短,完成路徑規劃的時間更少,適合石化企業的火災救援。
猜你喜歡
當代水產(2022年8期)2022-09-20 06:44:30
當代水產(2022年6期)2022-06-29 01:11:44
當代水產(2022年5期)2022-06-05 07:55:06
當代水產(2022年3期)2022-04-26 14:27:04
當代水產(2022年2期)2022-04-26 14:25:10
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
云南畫報(2020年9期)2020-10-27 02:03:26
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44