基于故障樹模型的航空雷達在線入侵診斷系統(tǒng)設(shè)計
2022-12-27 13:14:56徐新星
計算技術(shù)與自動化 2022年4期
徐新星
(安徽財貿(mào)職業(yè)學(xué)院,安徽 合肥 230000)
飛機雷達系統(tǒng)結(jié)構(gòu)復(fù)雜,各功能模塊之間存在大量的信息交互。網(wǎng)絡(luò)是現(xiàn)代航空運輸技術(shù)發(fā)展的方向。空中雷達網(wǎng)包括航空中心網(wǎng)和計算機網(wǎng)絡(luò)。互聯(lián)網(wǎng)要求信息傳輸快速、準確、高密度。機載雷達中心節(jié)點通過戰(zhàn)術(shù)數(shù)據(jù)鏈連接,實現(xiàn)全網(wǎng)動態(tài)更新。數(shù)據(jù)和信息在網(wǎng)絡(luò)上確保實時傳送信息[1]。空中雷達受到外部數(shù)據(jù)入侵的威脅,會對航空航天造成嚴重損害。航空雷達的迅速發(fā)展使其受到越來越多的攻擊,所以,采用一種高效的入侵檢測技術(shù)就顯得尤為重要。現(xiàn)有方法利用計算機網(wǎng)絡(luò)將不同分散的雷達位置組合起來,雖然具有良好診斷效果,但也受到動態(tài)環(huán)境的影響,導(dǎo)致診斷精準度較低;利用雙向關(guān)聯(lián)記憶網(wǎng)絡(luò)應(yīng)用技術(shù)構(gòu)建了遠程航空雷達網(wǎng)絡(luò)的在線入侵診斷模型,并利用實時網(wǎng)絡(luò)入侵檢測與診斷技術(shù),為遠程航空雷達網(wǎng)絡(luò)防御外部網(wǎng)絡(luò)入侵提供了一種途徑。雖然使用該系統(tǒng)能夠免受外部環(huán)境影響具有良好診斷效果,但容易受到網(wǎng)絡(luò)外部行為特征影響,導(dǎo)致診斷效果變差。針對該問題,提出了基于故障樹模型的航空雷達在線入侵診斷系統(tǒng)設(shè)計。
1 系統(tǒng)整體架構(gòu)設(shè)計
隨著雷達設(shè)備復(fù)雜性的不斷提高,其入侵診斷變得越來越困難,并且設(shè)備分布廣泛,難以及時、有效地診斷故障。遠程診斷系統(tǒng)充分利用了網(wǎng)絡(luò)信息技術(shù)的優(yōu)勢。為此建立遠程診斷服務(wù)中心[2]。它由診斷中心和現(xiàn)場設(shè)備工作站組成。本系統(tǒng)以遠程診斷中心為核心,提供設(shè)備的智能化診斷服務(wù)。其整體架構(gòu)如圖1所示。
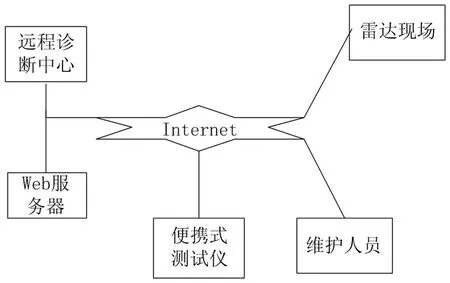
圖1 雷達在線入侵診斷系統(tǒng)整體架構(gòu)
如圖1所示,用戶可以通過瀏覽器訪問診斷中心專家系統(tǒng)的網(wǎng)站,通過網(wǎng)絡(luò)-遠程診斷專家系統(tǒng),獲取子系統(tǒng)的一般或異常信息。雷達子系統(tǒng)的組件通過便攜式檢測儀器進行檢測[3,4]。
如果設(shè)備出現(xiàn)故障,遠程診斷中心將提供診斷服務(wù),現(xiàn)場工作站將接收診斷服務(wù)器的指令協(xié)助診斷。如果設(shè)備出現(xiàn)嚴重故障,安裝現(xiàn)場的維護人員將無法正確處理,因此需要遠程診斷[5]。將本地診斷系統(tǒng)連接到遠程診斷系統(tǒng)后,遠程診斷系統(tǒng)通過計算機接口與診斷交互。在遠程診斷過程中,診斷專家可以通過推理和分析獲取現(xiàn)場設(shè)備的實時信息或歷史記錄,以及現(xiàn)場遠程診斷反饋[6]。
2 硬件結(jié)構(gòu)設(shè)計
雷達站是一個復(fù)雜的大型系統(tǒng),包括發(fā)射、接收、測量和傾斜度測量等功能站,彼此之間的距離較大。設(shè)計遠程故障診斷服務(wù)中心,各種功能診斷站和其他故障診斷資源維護站[7]。在每個功能站中,診斷站點都基于Web服務(wù)提供各種診斷服務(wù)。針對特定的診斷問題,通過網(wǎng)絡(luò)多站點協(xié)作,可以形成具有領(lǐng)導(dǎo)協(xié)作能力的動態(tài)診斷鏈。圖2中顯示了硬件結(jié)構(gòu)。

圖2 硬件結(jié)構(gòu)
由圖2可知,每個站點首先獨立完成系統(tǒng)設(shè)備的狀態(tài)監(jiān)測、故障處理、維護決策等工作。通過千兆光纖傳輸網(wǎng)絡(luò)發(fā)送服務(wù)請求,診斷臺也是大型系統(tǒng)的一個服務(wù)單位[8]。其服務(wù)功能是發(fā)布到中央服務(wù)器,然后由服務(wù)管理中心進行注冊,也就是服務(wù)注冊。值班員對各職能部門的中心服務(wù)站進行實時監(jiān)控,在發(fā)現(xiàn)問題或接收到服務(wù)請求時,進入信息數(shù)據(jù)庫,查找相關(guān)的服務(wù)信息,激活貝葉斯網(wǎng)絡(luò)推理決策機制,生成處理意見,供現(xiàn)場保障人員使用。由于缺乏必要硬件設(shè)備,故只有在遠程協(xié)助下才能解決現(xiàn)場人員無法解決的問題,從而提高雷達系統(tǒng)整體效能。
2.1 FS-N40光纖傳感器
使用的FS-N40型光纖傳感器位于光纖的末端,而光纖只是光的傳輸線,其將被測物理量轉(zhuǎn)換成光的幅度、相位或幅度。采用光纖技術(shù),可實現(xiàn)基于探測器的遙測。用光纖作為感測元件,不僅可以傳送光,而且可以作為光電傳感器[9-11]。在光纖自身外部環(huán)境的影響下,被測物理量通過調(diào)制光波導(dǎo)特性影響傳感器,從光源接收的光束通過光纖傳輸?shù)秸{(diào)制器,被測參數(shù)隨光的變化而變化,進入調(diào)制區(qū)的光的特性和光學(xué)特性會發(fā)生變化,產(chǎn)生調(diào)制光,光纖被傳輸?shù)焦怆娞綔y器進行解調(diào),從而得到測試參數(shù)。
2.2 DS1102Z-E數(shù)字示波器
DS1102Z-E數(shù)字示波器模擬帶寬為200 MHz,最高實時采樣率為1 GSA/s,最大存儲深度為24 Mpts,全面兼顧波形全局和細節(jié)不漏失任何波形變化,最高波形捕獲率為30000 wfms/s,隨時刷新波形,避免故障情況發(fā)生。DS1102Z-E數(shù)字示波器將電子信號轉(zhuǎn)換為圖像,由高速電子組成的窄電子束與含有熒光材料的屏幕表面碰撞產(chǎn)生微小光斑。在測量信號的作用下,電子束在屏幕上繪制被測信號的瞬時時間曲線。為了擴展數(shù)字示波器的帶寬,只需在初始部分改進A/D開關(guān)的特性。利用多重示波器管,能在熒光屏上同時顯示兩個以上不同頻率的信號波形,且無時差,定時準確。
2.3 紅外攝像儀
選擇200萬像素的優(yōu)質(zhì)攝像頭的S2型號紅外攝像儀,具有CAD 紅光藍牙攝像頭瞄準60 m,使用該攝像儀可將光電轉(zhuǎn)化主板和內(nèi)外雙光路校正光學(xué)作為補償,減少信號干擾,信號更加穩(wěn)定,測量數(shù)據(jù)也處于穩(wěn)定狀態(tài)。1000組數(shù)據(jù)存儲及導(dǎo)出,可直接在機器內(nèi)讀取,也可使用USB連接電腦導(dǎo)出。
一體化紅外線照相機是一種集照相機、護目鏡、紅外線照相機、散熱片等為一體的照相機。其基本原理是利用普通 CCD黑白相機對紅外光的光譜特征(即對可見光和紅外線的感知),結(jié)合紅外線燈作為“光源”進行夜視成像。紅外線燈具的功率、角度、攝像機配置及具有一定焦距的紅外線鏡頭,能夠在動態(tài)環(huán)境下實現(xiàn)雷達掃描結(jié)果快速成像。
2.4 雷達電路測試臺
雷達回路試驗臺主要用于雷達模擬電路的現(xiàn)場測試及更換維修的測試及維修設(shè)備,仿真電路試驗臺主要由臺式機組成,它通過 GPIB、RS232C、USB,以太網(wǎng)端口等接口與計算機相連,構(gòu)成支持VISA軟件標準的測試系統(tǒng),由此測試雷達電路。
3 系統(tǒng)功能設(shè)計
雷達站是由大量電子設(shè)備組成大型系統(tǒng),通常包括許多子系統(tǒng)。分系統(tǒng)間的相互關(guān)系與協(xié)調(diào)具有明顯的復(fù)雜性和層次性。當出現(xiàn)故障時,故障可能出現(xiàn)在不同級別之間。針對這一問題,提出了一種基于故障樹模型的故障診斷方法。
3.1 雷達層次故障樹模型構(gòu)建
結(jié)合故障樹分析方法,將層次法與故障樹診斷方法相結(jié)合,建立了層次故障樹模型[12-15],如圖3所示。

圖3 雷達層次故障樹模型
由圖3可知,在雷達發(fā)生故障時,先確定雷達結(jié)構(gòu)模塊,再確定各子單元的功能,然后比較各子單元的故障序列,最后采用故障診斷方法進行分析。如果雷達旋轉(zhuǎn)定位不準確,則先在伺服分系統(tǒng)結(jié)構(gòu)模塊中定位故障,再將故障定位到液壓裝置上,匹配液壓裝置相應(yīng)的故障樹,診斷故障原因。從而能夠準確定位故障位置,使診斷更具有針對性和目的性,避免盲目搜索與匹配故障,提高診斷效率。
3.2 確定故障特征向量
關(guān)系分析是故障樹定量分析中的一個重要環(huán)節(jié),常見的重要度包括:組件概率重要度、組件結(jié)構(gòu)重要度和組件函數(shù)重要度。采用故障樹分析法(FTA)對故障進行診斷,其依據(jù)的是最有可能發(fā)生事件的原理。利用貝葉斯條件概率公式求得了系統(tǒng)在出現(xiàn)故障現(xiàn)象時,故障原因發(fā)生的概率,并與診斷結(jié)果相對應(yīng)。因為故障樹的所有最小割集都反映了系統(tǒng)的所有故障模式,并且所有故障模式都是相互排斥的,所以由含有最小割集的割集組成結(jié)構(gòu)函數(shù)如下:
(1)
(2)
式(2)中,P(T)表示發(fā)生概率;FV表示故障原因定位重要程度依據(jù)。
采用重要性方法確定故障產(chǎn)生的原因是構(gòu)造故障樹以其特征為頂事件,以其原因為底事件,采用故障樹分析方法(FTA)對故障樹進行定性和定量分析,得到故障樹的底事件陣線,其值的重要性、次序與故障原因的優(yōu)先級相對應(yīng)。
3.3 在線入侵診斷流程設(shè)計
故障樹頂事件是最終要完成的任務(wù),以系統(tǒng)的故障形式、深度優(yōu)先搜索、故障診斷與正確的人機交互策略相結(jié)合,根據(jù)確定的故障特征向量,設(shè)計在線入侵診斷流程:
step 1:排除簡單故障
在分析了所有故障診斷實例后,發(fā)現(xiàn)有許多故障可以直接排除,如人為操作、環(huán)境、系統(tǒng)誤報等(這里稱為主觀故障)造成的故障。對簡單故障進行搜索,確定故障是否為主觀故障。如有,直接剔除,診斷終止,也符合實際操作流程。否則,將部件損壞、部件干擾等客觀故障作為重點診斷對象,可大大提高診斷效率。
step 2:確定故障單元
在結(jié)構(gòu)模塊規(guī)則庫中根據(jù)用戶報告的故障癥狀搜索確定功能部件,進一步縮小故障范圍。
step 3:確定故障樹
匹配所有頂事件,分析故障診斷時間,進而確定故障樹。
step 4:確定最小割集
結(jié)合式(1)、式(2)可得到含有最小割集的割集組成結(jié)構(gòu)函數(shù),由此確定最小割集。
step 5:排序
根據(jù)故障診斷重要程度,排列割集中的序列。
step 6:排除故障
在重要度排序的基礎(chǔ)上,尋找具有最高重要度的最小割集對應(yīng)觀察表,通過人機交互為用戶提供故障診斷方法。確認使用者是否有故障,如果有,則得到診斷結(jié)論,診斷結(jié)束。否則,先刪除所使用的切割集項,進入step 5,繼續(xù)進行故障診斷,當割集中沒有可以判斷的事情時,診斷結(jié)束。
4 實驗分析
將VisualC++6.0作為實驗平臺,根據(jù)實際情況對基于故障樹模型的航空雷達在線入侵診斷系統(tǒng)設(shè)計合理性進行實驗驗證分析。
4.1 雷達運行界面及參數(shù)
利用VisualC++6.0平臺中的用VisualC++編制串行通訊程序,應(yīng)用程序當接收到一個字符的光纖傳感器和光電探測器獲取的被測參數(shù)時,就產(chǎn)生一個低級硬件中斷,然后由系統(tǒng)中串行驅(qū)動程序取得控制權(quán),并將接收到的數(shù)據(jù)放入輸入數(shù)據(jù)緩沖區(qū),接著將控制權(quán)返回給正在運行的應(yīng)用程序,并通過雷達運行界面顯示。當雷達測試完畢后,就直接進入測試主界面,該界面可以顯示雷達發(fā)射機全部被檢測信息并附有故障指示燈,如圖4所示。

圖4 雷達測試主界面
由圖4可獲取雷達運行參數(shù),如表1所示。

表1 雷達運行參數(shù)
4.2 測試結(jié)果與分析
分別使用遠程支持系統(tǒng)、雙向聯(lián)想記憶網(wǎng)絡(luò)應(yīng)用技術(shù)和基于故障樹模型診斷系統(tǒng)對雷達發(fā)出波形檢測,如圖5所示。
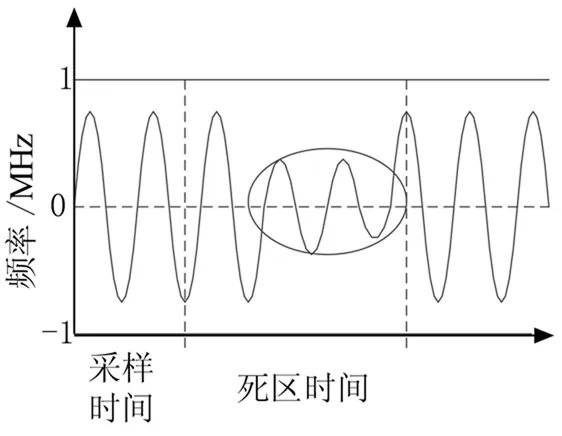
(a)遠程支持系統(tǒng)
由圖5可知,使用遠程支持系統(tǒng)、雙向聯(lián)想記憶網(wǎng)絡(luò)應(yīng)用技術(shù)受到故障影響,系統(tǒng)低刷新率造成死區(qū)時間延長;使用基于故障樹模型診斷系統(tǒng)不會受到故障影響,系統(tǒng)高刷新率縮短死區(qū)時間。
基于此,對不同在線入侵診斷方法的診斷精準度對比分析,結(jié)果如表2所示。
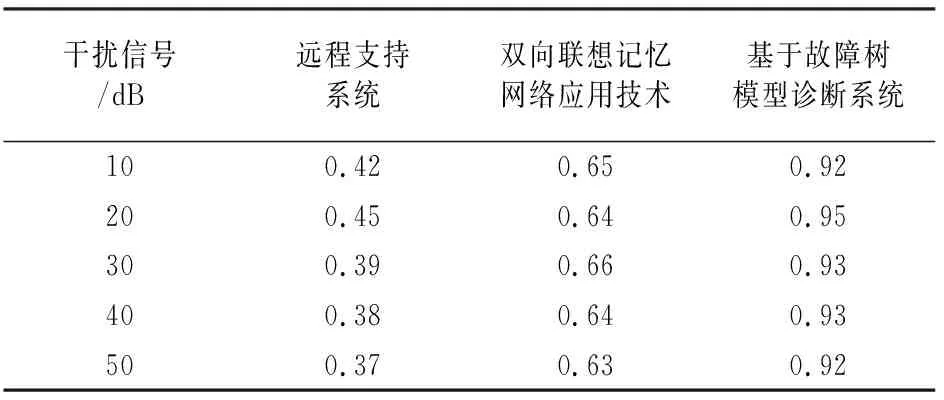
表2 不同方法診斷精準度對比分析
由表2可知,使用基于故障樹模型診斷系統(tǒng)最高診斷精準度為0.95,而其余兩種方法最高診斷精準度均低于0.66,說明使用基于故障樹模型診斷系統(tǒng)診斷精準度較高。
5 結(jié) 論
雷達故障日益復(fù)雜,在線故障診斷的要求也越來越高。提出了一種基于故障樹模型的航空雷達在線入侵診斷系統(tǒng),并結(jié)合層次故障樹診斷方法實現(xiàn)雷達故障的精確定位。該系統(tǒng)解決了存儲知識不方便和缺少統(tǒng)一數(shù)學(xué)模型的問題,為智能故障診斷提供了一種新的知識處理方法。
在此基礎(chǔ)上,開發(fā)了基于層次結(jié)構(gòu)的故障樹診斷方法,并探討了基于層次結(jié)構(gòu)的故障樹知識存儲方法。但該系統(tǒng)投入使用的時間較短,尚未完全成熟。雷達數(shù)據(jù)具有一定機密性,尤其要注意數(shù)據(jù)文件安全,并對系統(tǒng)使用數(shù)據(jù)庫文件加密。但由于訪問工具限制,加密技術(shù)一直未被成功應(yīng)用,需要在后續(xù)研究進程中加以實現(xiàn)。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21