三維激光掃描技術在河道測量中的應用
2022-12-23 13:10:02胡江宋小燕
河南水利與南水北調(diào) 2022年11期
胡江,宋小燕
(長江水利委員會水文局長江上游水文水資源勘測局,四川 攀枝花 617000)
1 三維激光掃描原理
這項技術主要使用專用設備發(fā)出激光束實現(xiàn)與被掃描物體之間距離的測量工作,這樣能夠精準地測量目標物體的相對集合關系,在坐標系中,直接獲得點云掃描點的三維左邊數(shù)據(jù)。三維激光掃描技術能夠?qū)⑷S物體轉(zhuǎn)換為三維數(shù)字,然后對掃描點的坐標進行計算。通常,將目標點設置為P,目標點與掃描儀之間的距離設為S,使用編碼器同時測量不同激光脈沖的橫向以及縱向掃描角度觀測值,將其分別設置為α 與β,而三維激光掃描坐標系通常為自定義模式,橫向掃描面為X軸,縱向掃描面為Y軸,通過坐標系的形式獲得P點坐標值。
2 三維激光掃描技術在河道測量中的優(yōu)勢
2.1 靈活性高
將三維激光掃描技術與傳統(tǒng)測量方法有機結合,可以更加高效、精準地進行坐標點位測量工作,或是直接在控制點上設置掃描儀,靜態(tài)進行數(shù)據(jù)觀測作業(yè),具有較高的靈活性。
2.2 數(shù)據(jù)獲取效率高
在河道測量工作中,應用三維激光掃描技術能夠簡化中線樁的測量流程,還可以簡化在起點與重點交接位置的掃描測量工作,數(shù)據(jù)測量工作人員僅需要通過三維激光掃描的方式即可獲得河道周邊的點云數(shù)據(jù)信息,將其進行預處理后,直接導入三維數(shù)據(jù)軟件中進行數(shù)據(jù)的編制,即可獲得準確的縱橫截面高程值信息。
2.3 系統(tǒng)集成度較高
在相機、掃描、慣導等集成系統(tǒng)及地圖構建算法的支持下,能夠降低掃描設備的重量,并增強整體設備的強度,只需要進行一次測量工作即可獲取精準的河道現(xiàn)場照片及點云數(shù)據(jù)。
3 三維激光掃描技術在河道測量中的應用
3.1 點云數(shù)據(jù)拼接與坐標轉(zhuǎn)換
為確保點云數(shù)據(jù)信息獲取的完整性,需要在不同的站點以及角度對目標物體進行測量,將所有三維數(shù)據(jù)信息轉(zhuǎn)化后導入至統(tǒng)一的坐標系中。將系統(tǒng)采集到的點云數(shù)據(jù)使用專門的軟件中的拼接功能進行拼接處理。選取三個以上的公共標靶,將其設置為同名點,利用RTK對標靶的大地坐標進行測量,使用同名點進行變換參數(shù)的計算,然后對數(shù)據(jù)進行拼接處理。
3.2 點云數(shù)據(jù)的濾波分類
點云期間經(jīng)常出現(xiàn)各種誤差現(xiàn)象,主要由系統(tǒng)、目標物體表層特征以及人工隨機等各種因素引起,其導致的噪音和植被信息等,都需要對其濾波進行分類處理,消除其中的誤差數(shù)據(jù)。
首先,將數(shù)據(jù)信息中的過低點、高點以及孤立點去除,使用在不規(guī)則三角網(wǎng)基礎下的漸進加密算法處理非地面點的濾波信息。這種方式需要先將原始數(shù)據(jù)劃分為網(wǎng)格狀,將每個網(wǎng)格中的最低點標記出來,然后以標記的最低點為初始點,建設新的原始表面模型,然后通過其他方式對不同點位信息進行判斷。這樣判斷需要著重關注濾波閾值的選擇,參考地形坡度角度、迭代角以及迭代距離等信息,主要結合測量區(qū)域的實際特征進行參考值的選取。這種方式的優(yōu)勢在于能夠最大化地保留地形的變化情況,對大量不連續(xù)的曲面地形工程測量中具有較好的測量效果。而數(shù)據(jù)中無法完全去除的非地面點以及噪音點等,可以使用人工的形式進行去除,確保數(shù)據(jù)的有效性以及精準性。
通過三維激光掃描的形式測量的數(shù)據(jù)在測距的影響下,將會導致點云數(shù)據(jù)密度情況變化相對較大,因此,對于掃描測距相對較近,而具有高密度的點云數(shù)據(jù)需要受到稀疏化處理,即在點云的離散度基礎上,對其進行簡化。
3.3 DEM差值與河道斷面提取
DEM差值理論主要來源于施工區(qū)域的空間異質(zhì)性以及空間相關性,以空間相關性為主。DEM差值算法主要是在地理學第一定律的基礎上得來,對已經(jīng)獲取的采樣信息影響未知差值點的影響程度進行調(diào)節(jié),二者之間的關系能夠直接地體現(xiàn)相鄰空間對象間的空間關系。常見的差值算法有反距離加權差值算法、謝別德差值算法、徑向基函數(shù)差值算法、克里金差值算法以及三角網(wǎng)差值算法等不同的方式,通過差值實驗,能夠有效明確不同方式下差值的計算效果以及誤差信息,并針對誤差情況進行深入分析。
在DEM下自動形成河道斷面信息對傳統(tǒng)方式提取河道斷面效率低下的問題有著巨大的改善。
斷面數(shù)據(jù)的提取步驟如下:第一,確定河道斷面位置。通常會將河道斷面中心處的水平坐標用來代表河道斷面位置,在遙感影像技術的幫助下,首先采集河流中心線的位置,在距離中心線一定范圍內(nèi)進行河道斷面中心點位信息的采集工作。第二,確定河道斷面方向。采集河流中心線時,通常會以從上到下的方向展開采集作業(yè),而中心點位對河道斷面的采集主要以垂直的方向展開。第三,提取河道斷面點云信息。在河道斷面位置,將固定點位作為起點,向兩側(cè)進行延伸,相隔固定水平距離后,進行點位的采樣工作,并計算該點位在坐標軸上的位置信息,結合坐標值在DEM數(shù)據(jù)中進行高程值信息的查詢。第四,采樣點差值提取河道斷面。將在相對離散的數(shù)據(jù)中獲取的斷面信息,首先進行差值處理,便于獲取相對連續(xù)的斷面數(shù)據(jù)信息。具體操作時,可以使用三次樣條函數(shù)差值或是線性差值處理離散點數(shù)據(jù)信息。
4 應用分析
4.1 點云數(shù)據(jù)處理
首先,使用專業(yè)軟件對站點測量信息進行拼接處理,將濾波進行分類,去除數(shù)據(jù)中的噪音成分。在原始點云數(shù)據(jù)中,會有部分數(shù)據(jù)是由于水面鏡面反射而形成的,但是這部分點云位置信息通常處于最低點,因此,可以通過設置高程閾值實現(xiàn)對數(shù)據(jù)的控制掌控。
其次,結合A河段的地理特征,可以設置尺寸60最大坡度88 迭代角為6 迭代距離為1.4 的網(wǎng)格,對地面點云數(shù)據(jù)進行處理。使用人工判斷以及機械設備判斷共行的方式能夠直觀地獲取一類誤差、二類誤差以及總誤差信息。其中,一類誤差主要是非地面點個數(shù)在整體地面總數(shù)中的占比,二類誤差則主要是非地面點在參考地面點位總數(shù)中的占比;最后總誤差指的是錯誤點在總點云數(shù)量中的占比情況,結合測量數(shù)據(jù)可知其誤差情況依次為3.60%、6.30%以及4.60%。
4.2 插值計算
對河道掃描后,使用五種插值算法進行數(shù)據(jù)的對比分析工作,網(wǎng)格大小不超過10 cm,依據(jù)實際目視效果而言,SPD算法插值效果最差,不僅對空洞的填補效果不佳,而且掃描數(shù)據(jù)還會與實際地形之間出現(xiàn)較大的差異;而RBF算法最終形成的網(wǎng)格平滑性較差,而且細節(jié)位置會出現(xiàn)相對明顯的凸起情況。TIN插值算法具有明顯的三角面特征,同時平滑效果相對較差,網(wǎng)格狀態(tài)稍顯粗糙。最后,IDW以及Kriging插值算法生成的網(wǎng)格與實際地形之間的相似性較高,前者的效果更加真實,后者的平滑效果相對較好,各有優(yōu)勢。在不同插值算法之間,其平均誤差、標準誤差以及計算時間之間都有所區(qū)別,具體表現(xiàn)如表1。依據(jù)統(tǒng)計結果而言,雖然插值算法都會產(chǎn)生一定的誤差,但是誤差影響程度相對較小,而且不同算法的誤差值較為接近,沒有產(chǎn)生較為明顯的差異。依據(jù)計算時間來看,TIN算法的效率相對更高,然后是SPD算法;而依據(jù)計算速度而言,IDW最快,RBF最慢。鑒于此,工程在進行差值計算工作時,可以結合實際需求選用適宜的算法。
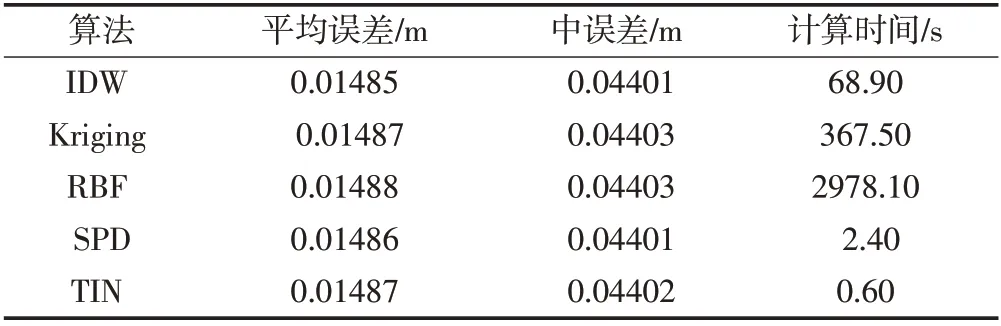
表1 不同算法之間的誤差表
4.3 斷面數(shù)據(jù)精準分析
為保障提取斷面的精準度,可以將實測地面店以及斷面信息之間進行對比,對其中的誤差情況進行對比分析,通常會選用200 個左右的實測點與斷面特征點進行高差的計算,結合σ=±[ΔΔ]/n的誤差公式進行高差計算。計算結果高差誤差為0.069 m,結合相關規(guī)范表明,誤差值能夠符合斷面測量高程精準度要求。會造成誤差的原因較多,包括地表植被對數(shù)據(jù)處理的影響以及點云配準誤差、坐標轉(zhuǎn)換誤差等。
在河道測量工作中應用三維激光掃描還會由于水下地形原因而出現(xiàn)一定的困難,主要是由于三維激光掃描儀通常無法穿過水體,以至于水下地形的獲取不準確,還需要使用其他方式進行采集。
5 結語
傳統(tǒng)形式的河道測量工作效率低,工作量大的同時密度不足,無法滿足信息化河道測量需求,施工三維激光掃描技術能夠獲取較高密度的點云數(shù)據(jù),有效減少工作時間以及人力成本,增強了測量作業(yè)的可靠性,但是海量的數(shù)據(jù)處理工作也對計算機的硬件要求有所提升。在信息化社會背景下,三維激光掃描技術水平將會不斷提升,應用范圍也會更加廣泛。
猜你喜歡
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中華手工(2017年2期)2017-06-06 23:00:31
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28