基于機載LiDAR的山區水庫管理范圍線自動提取及精度評定
2022-12-23 13:10:02趙現昌裴書玉
河南水利與南水北調 2022年11期
趙現昌,裴書玉
(河南省水利勘測有限公司,河南 鄭州 450008)
1 引言
精確劃定水庫的管理和保護范圍,對建立范圍明確、權屬清晰的水利工程管理保護責任體系具有重要意義。機載LiDAR 用于植被覆蓋茂密的山區水庫測繪有著很大的技術優勢,主要表現在:①受天氣影響較小,激光脈沖不受陰影和太陽角度的影響,可進行全天候作業。②數據生產周期短、精度高,所需外業控制點較少,數據處理自動化程度高。③有一定的穿透性,激光雷達在能夠穿透一定覆被密度的植被,獲取茂密植被覆蓋下的地面高程數據。
針對激光雷達數據處理時難以在植被覆蓋度高的山區水庫地形中獲取地表信息的難題,提出一種基于高精度DEM的等值線自動提取方法,并輔以人機交互干預,用于植被茂密的山區水庫管理與保護范圍線特征點提取,實例應用結果表明方法有效。
2 技術方法
2.1 PTD濾波算法
PTD濾波算法基本原理為:對原始LiDAR點云數據格網劃分,根據測區最大建筑物尺寸確定格網間距,選取每個格網區域內高程最低點作為種子點構成初始稀疏TIN模型;對TIN網中的每個點,通過判斷其反復角和反復距離是否小于給定的閾值對其進行分類;對每個小于閾值的地面點即時加入到TIN網中,迭代濾波,直到沒有新的地面點產生為止。圖1 為漸進不規則三角網加密濾波算法原理圖。
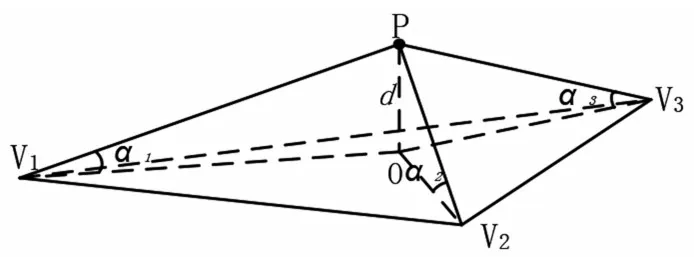
圖1 漸進不規則三角網加密濾波算法原理圖
P是一個未分類點,V1,V2,V3是已知地面點并且構成一個平面。平面方程為:

2.2 Kriging插值生成高精度DEM
水域DEM快速生成方法:首先,通過正射影像勾繪出水域的范圍;然后,利用水域邊界和岸邊的地面點云通過分段Kriging 插值擬合生成水體區域點云;再將插值擬合生成的水域點云與分類得到的地面點云拼接得到完整的點云數據;最后使用合并后的完整點云構建不規則三角網(TIN)生成高精度DEM。
2.3 等值線提取及改進的Bezier函數法擬合
等值線提取及擬合的方法:①快速提取構TIN 點集,通過內存映射和高程區間緩沖區分析,從海量點云數據中快速提取構TIN 點集。②優化逐點插入法,實現帶狀Delaunay 三角網的快速構建。通過對離散點云數據進行格網劃分,以減少定位點的判斷次數,并將三角形面積坐標法與直線行走算法相結合,在點定位過程中可大幅度縮短搜索路徑,快速定位到插入點所在的目標三角形。③等值線生成,經過Delaunay三角網快速構TIN 之后,要得到z=h的等值線,只需要建立z=h的平面方程與TIN 模型求交,并將得到的等值線段進行排序,首尾相連后得到該等值線。④等值線光滑,文章采用在拐角處以等值點和切線點共同作為控制點的方法來解決Bezier 函數法曲線光滑后不再通過所有等值點的缺點。改進后的Bezier 函數法擬合的等值線嚴格正確、不產生多余拐點,但需逐步調整相關參數,以達到最優狀態,適用于水庫劃界等對結果要求嚴格的場合。
3 實例與分析
3.1 研究區概況
盤石頭水庫兩岸峭壁陡立,植被較為茂密,是一座以防洪、供水為主的大Ⅱ型水利樞紐工程。該水庫控制流域面積1 915 km2,總庫容6.08億m3。庫區周邊最高海拔700 m,最低海拔200 m,最大落差達500 m。此次實驗采用RIEGL_VUX-1LR 系統+索尼A7RⅡ相機搭載在云影C200固定翼無人機上進行數據采集,相對飛行高度540 m,影像旁向重疊度60%,航向重疊度80%,激光發射頻率(PRR)100 kHZ,平均點密度7 個/m2。測區總面積110 km2,采集到點云數據34 GB。
3.2 實驗結果
3.2.1 點云濾波
PTD 算法濾波前,首先采用最近鄰搜索法去除離群噪點,以減少低于地面的噪點對濾波結果的影響。原始點云與采用PTD濾波算法濾波后的點云渲染圖如圖2所示,PDT濾波算法既能濾除絕大多數非地面點,同時保留地形的完整性,但需采用人機交互方式進行精細分類,使分類結果更為準確。
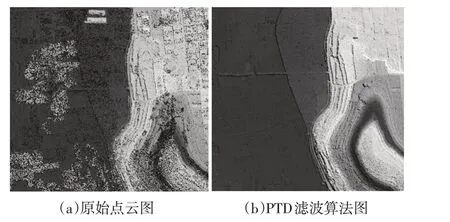
圖2 PTD算法濾波后地面點云渲染圖
3.2.2 高精度DEM生成
如圖3所示為Kriging插值擬合的水體區域點云,圖4為點云合并后構建的TIN格式高精度DEM。

圖3 插值生成水域點云圖
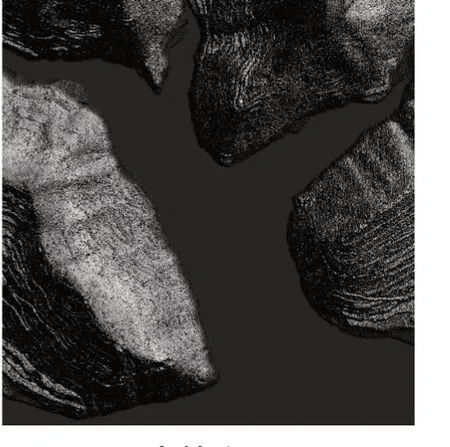
圖4 高精度DEM圖
3.2.3 管理范圍線提取及擬合
盤石頭水庫遷賠高程262.69 m,按此法提取得到的高程值等于遷賠高程的等值線長度109.30 km。圖5所示為改進后的Bezier函數法擬合的水庫管理范圍線疊加DOM的成果。
圖5 水庫管理范圍疊加DOM成果圖
3.3 精度評定
采用RTK對遷賠高程等值線上點實地放樣以檢查管理范圍線的提取精度。高程中誤差在±11 cm 以內,故山區水庫管理范圍自動提取方法能夠滿足水庫界限劃定的精度要求。
4 結語
①通過PTD 濾波、Kriging 插值構建水庫庫區高精度DEM。②采用平面與DEM 求交獲取初步的水庫管理范圍線。③用改進的Bezier 函數法對等值線擬合。實驗結果表明該方法解決了傳統測量方法作業環境危險、人員無法到達的難題,提高了工作效率。