一種基于機器視覺的多工作頭機械手結構的總體設計
2022-12-20 06:41:20楊振宇羅錦濤謝祥吉鐘勇銳
機電產品開發與創新 2022年6期
楊振宇, 羅錦濤, 謝祥吉, 鐘勇銳
(中山職業技術學院, 廣東 中山 528400)
0 引言
在自動化設備和產線中, 機械手是上下料和生產線裝配[1]的關鍵單元,尤其在需要對工件安裝定位有較高精度要求的應用場合, 就更加需要對機械手拾取的工件進行角度校正和精確定位。單工作頭的機械手,每次只能拾取和操作一個工件,生產效率不高,隨著機器視覺技術和智能化技術的成熟應用和不斷發展, 多工作頭的機械手已經成為關鍵技術, 并成為當前自動化控制系統中重要的前沿技術,多工作頭的機械手大大提高了生產效率,但技術含量高,結構工藝復雜[2],如何實現對每個工作頭的角度校正和精度是一個重要的技術問題,本文針對這個問題,提出了一種多工作頭機械手,能夠一次拾取多個工件,又能分別對所拾取的工件進行精確的角度校正和安裝定位,本文設計的機械手裝置可以用于大型物料的上下料和角度校正,如拾取和搬用物料的碼垛機械手,也可用于電子器件的貼片頭,如用于PCB 電路板上的芯片進行貼片。
1 多工作頭機械手的總體設計
機械手整體[3]在結構上,分為四個部分,多層式機架[4]部分, 動力部分,旋轉校正部分,電磁離合部分,并由上向下布置,其中動力部分主要包括位于中心的伺服電機和圍繞伺服電機布置的多個伸縮氣缸,如圖1 所示。
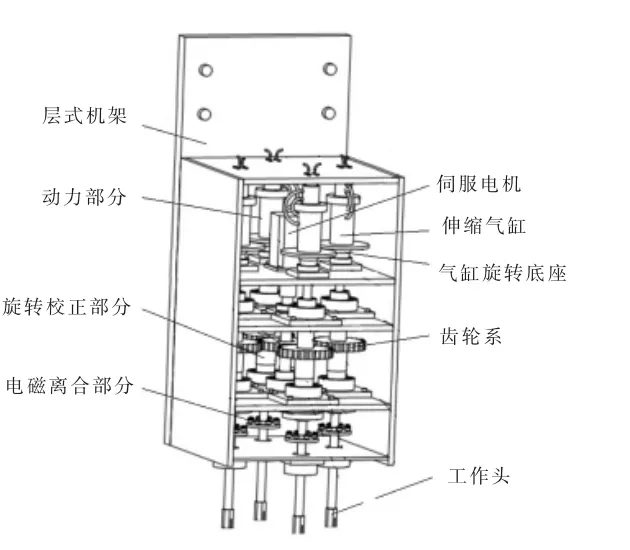
圖1 多工作頭機械手三維結構模型圖
1.1 旋轉校正部分的結構設計
為實現對多工作頭的角度校正, 本設計采用一個伺服電機和一組齒輪系結構, 將伺服電機精確校正后的轉動角度傳動到機械手的每個工作頭上, 以實現對每個工作頭上工件的姿態角度校正。
如圖2 所示齒輪系呈平面布置, 由伺服電機驅動的主動輪居于幾何中心, 驅動各個工作頭的從動輪圍繞主動輪呈圓周布置,結構更加緊湊[5],從動輪的數目可以根據工件尺寸和機械手的大小而不同, 本文示例圖中布置了四個從動輪,分別驅動四個工作頭。
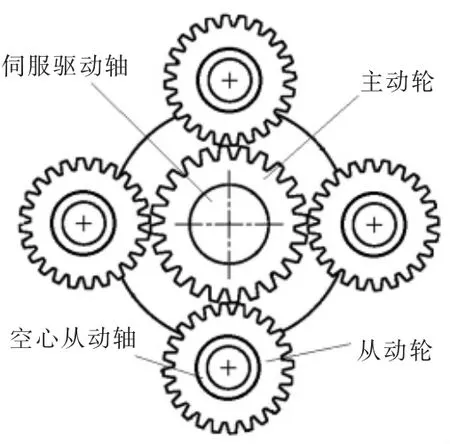
圖2 旋轉校正齒輪系
1.2 機械手結構設計
如圖3 所示為單個機械手的三維模型,每個機械手都包括氣缸,氣缸旋轉底座,氣缸桿,空心旋轉軸, 電磁離合器等,并自上而下安裝在橫向布置的多層式機架上,其中,空心旋轉軸上裝有從動齒輪,氣缸桿的前端安裝有用于拾取工件的吸盤或機械夾爪。每個機械手具有相同結構,將多個機械手圍繞伺服電機和伺服驅動軸呈圓周型布置,就形成了一個多工作頭的機械手。
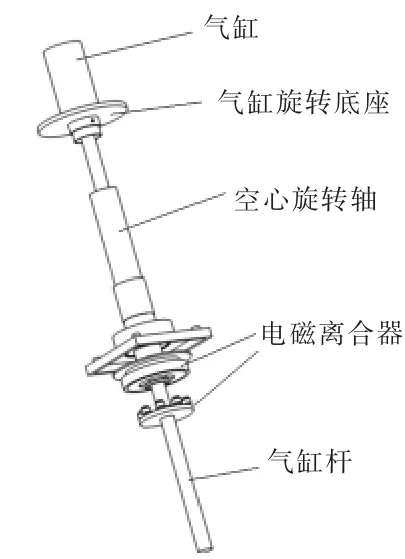
圖3 單個機械手的機械結構三維模型圖
機械手工作頭可以豎向伸縮移動,以實現對工件的拾取或安裝放置, 也可以軸向旋轉,以實現對工件的角度校正。為實現工作頭的豎向伸縮,氣缸桿自上而下從空心旋轉軸中穿過,在氣缸桿的兩端,布置有精密直線軸承以保證機械手在豎直方向具有精度較高和平穩的直線運動,如圖4 所示。 為實現工作頭的軸線旋轉,工作頭氣缸安裝在氣缸旋轉底座上,并裝有氣動旋轉接頭,以使氣缸可以360°旋轉。
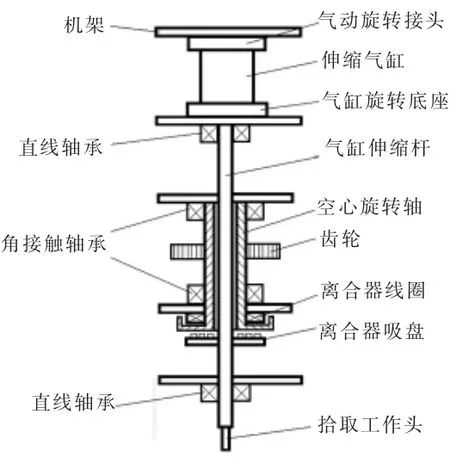
圖4 機械手的單個工作頭結構
1.3 電磁離合器的結構設計
為實現對每個工作頭所拾取的工件,分別進行角度校正,本文設計了一種新穎的電磁離合器,用于將空心旋轉軸和工作頭氣缸桿進行離合控制。 電磁離合器的設計結構如圖5 所示,其中,離合器磁軛安裝在機架上, 離合器動盤通過鍵和空心旋轉軸相連并同時旋轉,動盤上裝有靜摩擦片。本文所設計電磁離合器的主要特點是氣缸桿上安裝有一個盤型支架, 在盤型支架的圓周方向裝有多個可伸縮的動銜鐵和彈簧機構,動銜鐵頂部貼裝有動摩擦片,當工作頭需要角度校正時,電磁離合器得電,電磁力克服了彈簧力,將盤型支架上的動銜鐵緊緊吸合到動盤上,伺服電機旋轉,帶動空心旋轉軸、電磁離合器動盤和氣缸桿一起同軸旋轉,這時所有的從動輪和空心旋轉軸一起旋轉,但只有電磁離合器得電吸合的工作頭進行了角度校正,校正完成后,伺服電機停止,電磁離合器松開,氣缸動作,將校正后的工件進行安裝和放置。
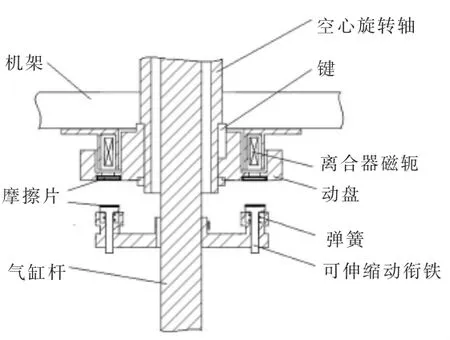
圖5 電磁離合器的結構
2 多工作頭機械手的控制流程
為實現機械手一次拾取多個工件, 并在安裝放置時能對每個工件進行準確的定位, 需要將一個較大視野和足夠像素的機器視覺相機放置于機械手下方, 以對多工作頭一次拾取工件后的所有工件的拾取姿態進行拍照,檢測每個工作頭上的工件角度和姿態偏差, 并和視覺系統所設定的標準姿態模板進行比對, 以得到每個工作頭上工件的拾取姿態角度的偏差值,以用于后期的校正。
多工作頭機械手的程序控制流程如圖6 所示, 機械手一次拾取多個工件后, 移動到機器視覺相機位置進行拍照,得到每個工作頭上工件的角度偏差[6],視覺系統將檢測到的每個角度偏差傳送給PLC, 然后PLC 分別控制相應工作頭的電磁離合器和氣缸,以及伺服電機動作,以實現對每個工作頭進行角度校正, 每個工作頭的角度校正和安裝放置的順序依次逐個展開, 例如首先工作頭1上的電磁離合器動作, 使其上的空心旋轉軸和工作頭氣缸桿相吸合,伺服電機旋轉,帶動工作頭1 的單個機械手整體旋轉,完成校正后,伺服電機停止,工作頭1 電磁離合器松開,工作頭1 上的氣缸伸出,對校正后的工件進行安裝和放置后,氣缸縮回,然后工作頭2 上的電磁離合器動作,然后依次循環,最終依次對所有工作頭皆完成工件的校正和安裝放置后,整個機械手復位,回到工件拾取位置,開始下一次拾取。

圖6 多工作頭機械手的控制流程
3 結束語
多工作頭的機械手大大提高了生產效率, 已成為自動化生產設備的主流, 目前多工作頭機械手傳動結構復雜,成本高,并且在結構上受空間位置影響較大,為實現對所有工作頭上的物料工件進行角度校正, 順序控制優化算法也較為繁瑣,復雜度大[7],影響了機械手的定位精度。本文提出的多工作頭機械手,所有的單個機械手工作頭圍繞伺服電機驅動軸呈圓周型布置,具有結構簡單,空間利用性好,可移植性強的特點,尤其是設計了一種電磁離合器, 將空心旋轉軸和氣缸桿兩個有軸向相對運動的零件,可以相互吸合,同軸旋轉運動,也可以互不干擾,氣缸桿穿過空心旋轉軸進行軸向運動, 有效解決了對每個工作頭進行單獨角度校正的技術問題, 相比于傳統的多工作頭機械手,控制算法簡單,控制流程簡潔,工作效率高,這種結構可以廣泛應用于集成電路裝配,精密儀器裝配,也可以用于大型物料的上下料、碼垛等生產實際中,具有較高的應用價值。