基于系統(tǒng)理論過程分析的定檢維修疲勞致因分析與控制
2022-12-19 12:55:10楊曉強賀非賀強徐晨林躍
科學(xué)技術(shù)與工程 2022年32期
楊曉強,賀非,賀強,徐晨,林躍
(中國民用航空飛行學(xué)院航空工程學(xué)院,廣漢 618307)
定檢[1]是按照飛機維修計劃,根據(jù)適航性資料,在航空器或航空器部件使用達到一定時限進行的檢查和修理,屬于預(yù)防性維修。從接收檢查到記錄和報告無不需要機務(wù)人員全身心徹底地落實,周而復(fù)始就會產(chǎn)生疲勞,而疲勞會誘發(fā)維修作業(yè)中的錯、忘、漏等安全風(fēng)險[2]。近二十年的航空事故統(tǒng)計表明,由機務(wù)人員維修差錯導(dǎo)致的事故增加了4%,而其中大部分與機務(wù)人員的疲勞作業(yè)有關(guān)[3]。《維修單位的安全管理體系》(AC-145-15)[4]咨詢通告表明,機務(wù)人員的身心健康在保障民用航空飛行安全方面起到了重要作用,使得因航空器維修問題造成的飛行事故率持續(xù)保持在較低的水平。因此,對定檢中機務(wù)人員疲勞致因進行分析,不僅有助于制定出行之有效的疲勞管理策略,而且能夠提升維修工作計劃制定的科學(xué)性。
近年來,中外學(xué)者對疲勞開展了大量的研究。朱峰等[5]基于單位時間內(nèi)眼睛閉合時間占比、最長持續(xù)閉眼時間和哈欠次數(shù)3個指標,通過改進的Yolov3算法構(gòu)建多特征融合的疲勞檢測模型,結(jié)果表明識別準確率達92.5%。廖明明等[6]基于雙流卷積神經(jīng)網(wǎng)絡(luò)融合傳統(tǒng)特征構(gòu)建駕駛員疲勞檢測模型,結(jié)果表明具有較強的魯棒性。楊如民等[7]運用蝙蝠算法獲取優(yōu)選決策樹和分類特征等參數(shù)并將其作為隨機森林算法的輸入建立精神疲勞檢測模型,結(jié)果表明準確率為96.7%。梁海軍等[8]基于遷移學(xué)習(xí)算法構(gòu)建管制員眼睛狀態(tài)識別模型,結(jié)果表明檢測準確率為97%。Zhang等[9]基于隨機森林回歸模型融合6個敏感導(dǎo)聯(lián)特征構(gòu)建航天員腦力疲勞快速檢測模型,結(jié)果表明準確率達85.25%。系統(tǒng)理論過程分析方法(systems-theoretic process analysis,STPA)方法廣泛應(yīng)用于對安全要求極高的系統(tǒng)分析中。張宏宏[10]提出了基于STPA-TOPAZ(traffic organization and perturbation analyzer,TOPAZ)的低空無人機沖突解脫安全性分析方法,仿真結(jié)果表明:該方法的有效性與優(yōu)越性。Li等[11]將系統(tǒng)理論過程分析與網(wǎng)絡(luò)分析法相結(jié)合,對某型民機數(shù)字飛控系統(tǒng)進行分析,通過形式化工具及仿真驗證,結(jié)果表明該方法能夠確定系統(tǒng)的危害致因。Lü等[12]運用系統(tǒng)理論過程分析法對空中加油過程分析出46條不安全控制行為和致因,確定與之對應(yīng)的44項約束條件,結(jié)果表明該方法的優(yōu)越性。肖國松等[13]運用系統(tǒng)理論過程分析法對通用系統(tǒng)管理中的動態(tài)重構(gòu)實例進行研究,結(jié)果表明該方法可為安全性分析提供依據(jù)。Huang等[14]運用系統(tǒng)理論過程分析法對48起航空事故進行分析,提取事故鏈繪制事故網(wǎng)絡(luò),為后續(xù)定性分析做好鋪墊。
現(xiàn)有的維修疲勞分析方法大多基于故障樹[15]、故障模式影響分析[16]等線性方法,對于人的行為、大型工程系統(tǒng)和非線性等問題難以準確分析,此外由于傳統(tǒng)方法中的組件處于相互獨立這一假設(shè)前提下,因此也不能對強耦合系統(tǒng)進行有效分析。盡管STPA從控制的角度尋求危害發(fā)生的原因,并從系統(tǒng)全壽命周期的角度來提出改進措施,但是存在尚未形成成熟的執(zhí)行程序、繪制STPA控制結(jié)構(gòu)的困難、沒有對危害等級定量化、沒有結(jié)合有效的模型演繹或者驗證方法等缺陷。針對以上不足,首先提煉出簡潔的執(zhí)行程序并使用Visio軟件繪制STPA控制結(jié)構(gòu);然后提出STPA-FRV定量化方法,以標準格式描述規(guī)則便于理解,而且將功能兩兩配對來檢驗?zāi)P停蛔詈笤赟TPA-FRV模型中提取出有實際含義的可變性并基于形式化驗證工具進行演繹。
1 STPA模型工作機理
STPA是基于系統(tǒng)理論事故建模和過程(systems-theoretic accident model and process,STAMP)衍生出的一種危害分析方法,可用于系統(tǒng)的全生命周期內(nèi)。該方法是從控制回路的角度對系統(tǒng)進行建模,旨在全面分析組件之間的耦合。保障系統(tǒng)安全就要對每一回路施加必要的約束,從而系統(tǒng)安全就轉(zhuǎn)換成確保回路滿足約束條件。在系統(tǒng)理論中,系統(tǒng)被劃分成由高層到低層的控制結(jié)構(gòu),系統(tǒng)高層通過控制器將約束信息傳輸給下一層,以此類推直至執(zhí)行層,執(zhí)行層在執(zhí)行任務(wù)的過程中,可能由于各方面因素的侵擾而違反約束條件,從而產(chǎn)生危害并逐層反饋給系統(tǒng)高層,所以反饋回路是系統(tǒng)實現(xiàn)自適應(yīng)控制的核心。STPA主要包含兩個步驟:識別潛在危險控制和危害場景分析。STPA模型包括:STPA模型中的控制回路、回路的特征元素、回路之間的交互以及回路元素的可變性。STPA模型的功能可變性描述規(guī)則(functional variability of rules,RFV)表示如下。
(1)F為給定系統(tǒng)所包含控制回路的集合,CLn表示第n個控制回路,可表示為
F={CL1,CL2,…,CLn},n=1,2,3,…
(1)
(2)A表示每個控制回路的特征元素,CUn表示第n個控制器,CAn表示第n個控制動作,F(xiàn)Bn表示第n個反饋,MP表示被控方,可表示為
A={CU1,CA1,FB1,…,CUn,CAn,FBn,MP}
(2)
(3)R=F→F表示控制回路之間的關(guān)系,RCURCA、RCURFB、RCURMP分別表示控制器與控制動作、反饋和被控方之間的關(guān)系,可表示為
R={RCUn-1RCAn,RCUn-1RFBn,RCUnRMP,…,
RCUi-1RCAn,RCUi-1RFBi,RCUiRMP},
n=1,2,3,…且i≤n
(3)
(4)V表示可變性,即控制器、控制動作、被控方和反饋這4個方面的可變性對控制回路的影響,可表示為


n=1,2,3,…且i≤n
(4)
2 STPA模型的改進
首先使用RFV形式化定量化描述STPA中回路的可變性建立STPA-RFV模型,然后制定安全規(guī)范,最后用UPPAAL工具進行演繹,如圖1所示。
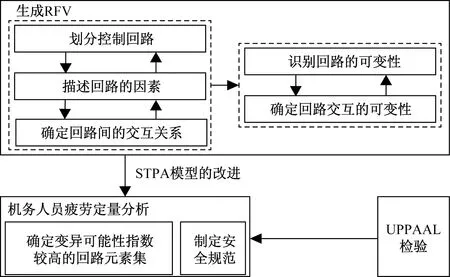
由于瑞士Uppsala大學(xué)和丹麥Aalborg大學(xué)聯(lián)合開發(fā)出系統(tǒng)驗證工具UPPAAL,因此選取這兩所大學(xué)前三個首字母作為這一工具的名稱
安全性分析的可變指數(shù)是STPA-RFV模型的核心要素,首先建立評價指標體系:將系統(tǒng)STPA模型中各回路視為一級指標,然后基于一級指標對STPA模型中各回路的交互劃分二級指標。所建立的可變指數(shù)評價體系如表1所示。對于回路的交互來說,可變指數(shù)與系統(tǒng)的穩(wěn)定性成反比。

表1 可變指數(shù)評價體系
然后請一線機務(wù)人員依據(jù)Thomas等[17]提出的1~9標度對回路之間的可變性進行評分,從而生成判斷矩陣。CLn回路交互判斷矩陣A構(gòu)建如表2所示。
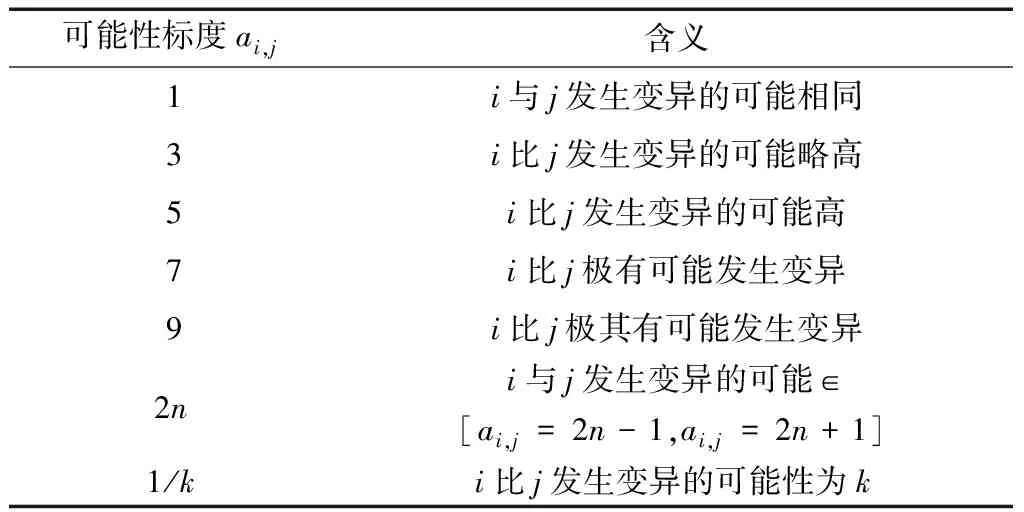
表2 判斷矩陣生成規(guī)則
可變指數(shù)確定步驟如圖2所示。
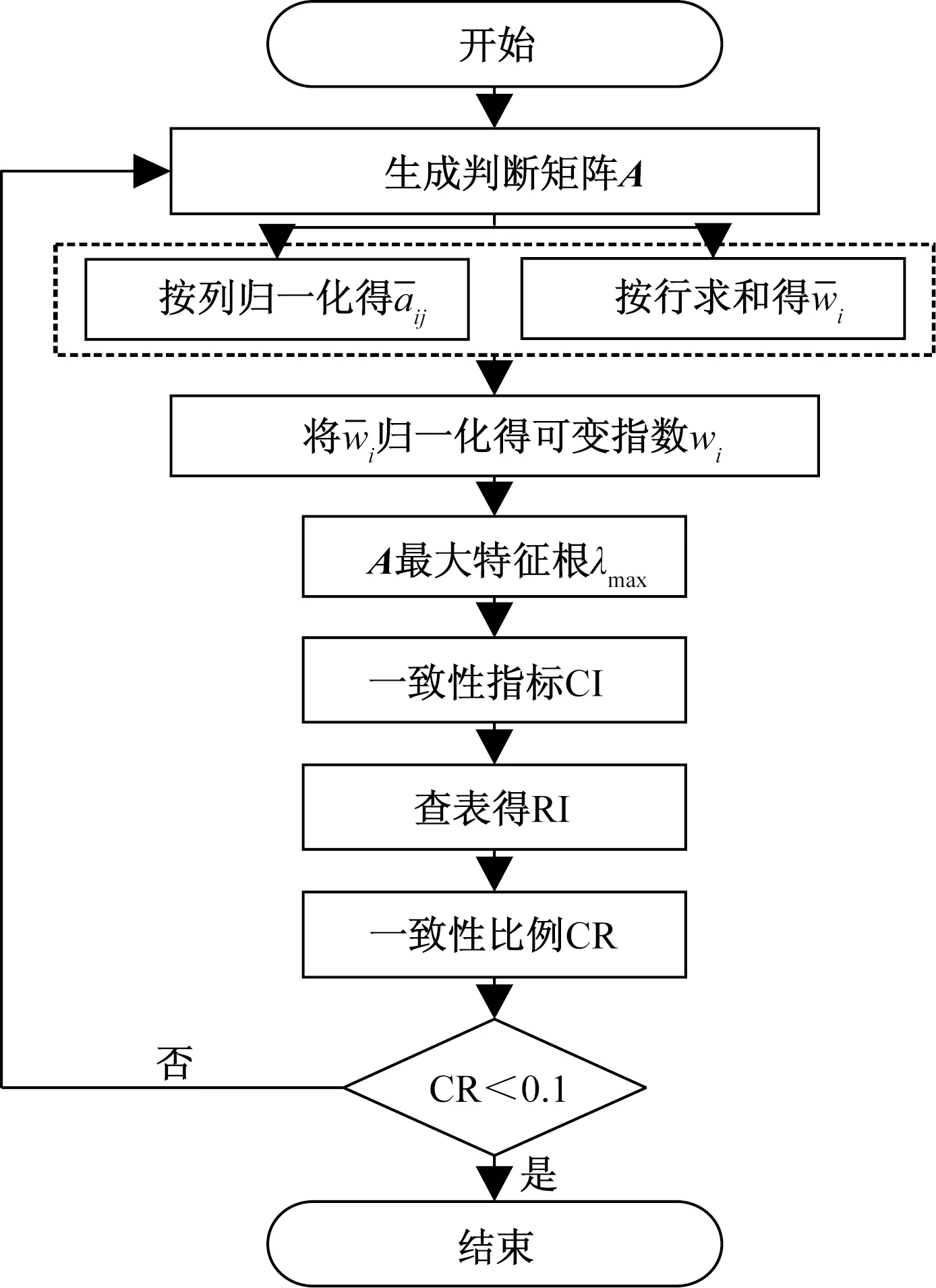
圖2 確定可變指數(shù)
3 改進的STPA在定檢中機務(wù)人員疲勞研究中的應(yīng)用
3.1 確定系統(tǒng)級危險并構(gòu)建分層控制結(jié)構(gòu)
系統(tǒng)級危險:H1定檢過程中出現(xiàn)錯誤;H2定檢被長時間延遲;H3定檢項目遺漏。定檢模塊是一個龐雜的系統(tǒng),通過熟悉整個系統(tǒng)的結(jié)構(gòu)和工作模式,找出定檢模塊中所包含的組件,分析每個組件在系統(tǒng)中的功能控制過程模型以及適用環(huán)境。定檢階段主要任務(wù)是克服一切干擾因素,嚴格遵循工卡逐項完成定檢工作,直至通過放行進程并交付給客戶。定檢模塊控制結(jié)構(gòu)如圖3所示。
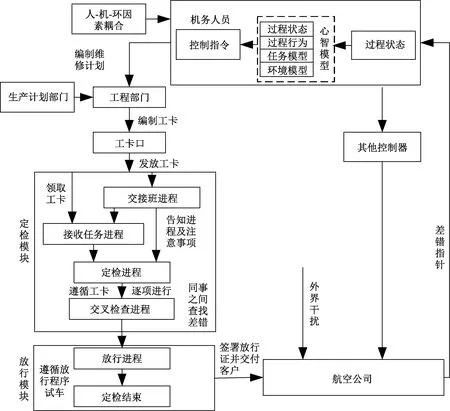
圖3 定檢階段控制結(jié)構(gòu)圖
定檢進程作為定檢階段的核心環(huán)節(jié),里面的控制結(jié)構(gòu)很復(fù)雜,僅從系統(tǒng)高層的控制結(jié)構(gòu)中不足以分析出定檢中機務(wù)人員的疲勞致因,這就要對該進程進一步構(gòu)建控制結(jié)構(gòu),從而深入分析出定檢中機務(wù)人員疲勞產(chǎn)生機制和控制方式。在系統(tǒng)層面,定檢進程被視為一個整體,其內(nèi)部具體如何運行不做考慮。但要分析出機務(wù)人員的疲勞致因,就需要對系統(tǒng)內(nèi)部的子組件進一步細化并提取組件之間的控制動作,從而構(gòu)建定檢和放行進程的控制結(jié)構(gòu)如圖4、圖5所示。
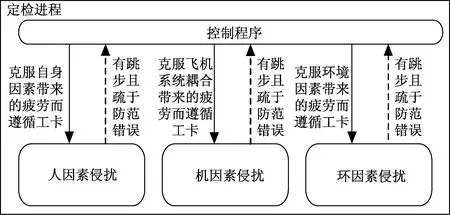
圖4 定檢進程控制結(jié)構(gòu)
累積疲勞(accumulate fatigue,AF)
3.2 控制回路的形式化描述

3.3 辨識不安全控制行為
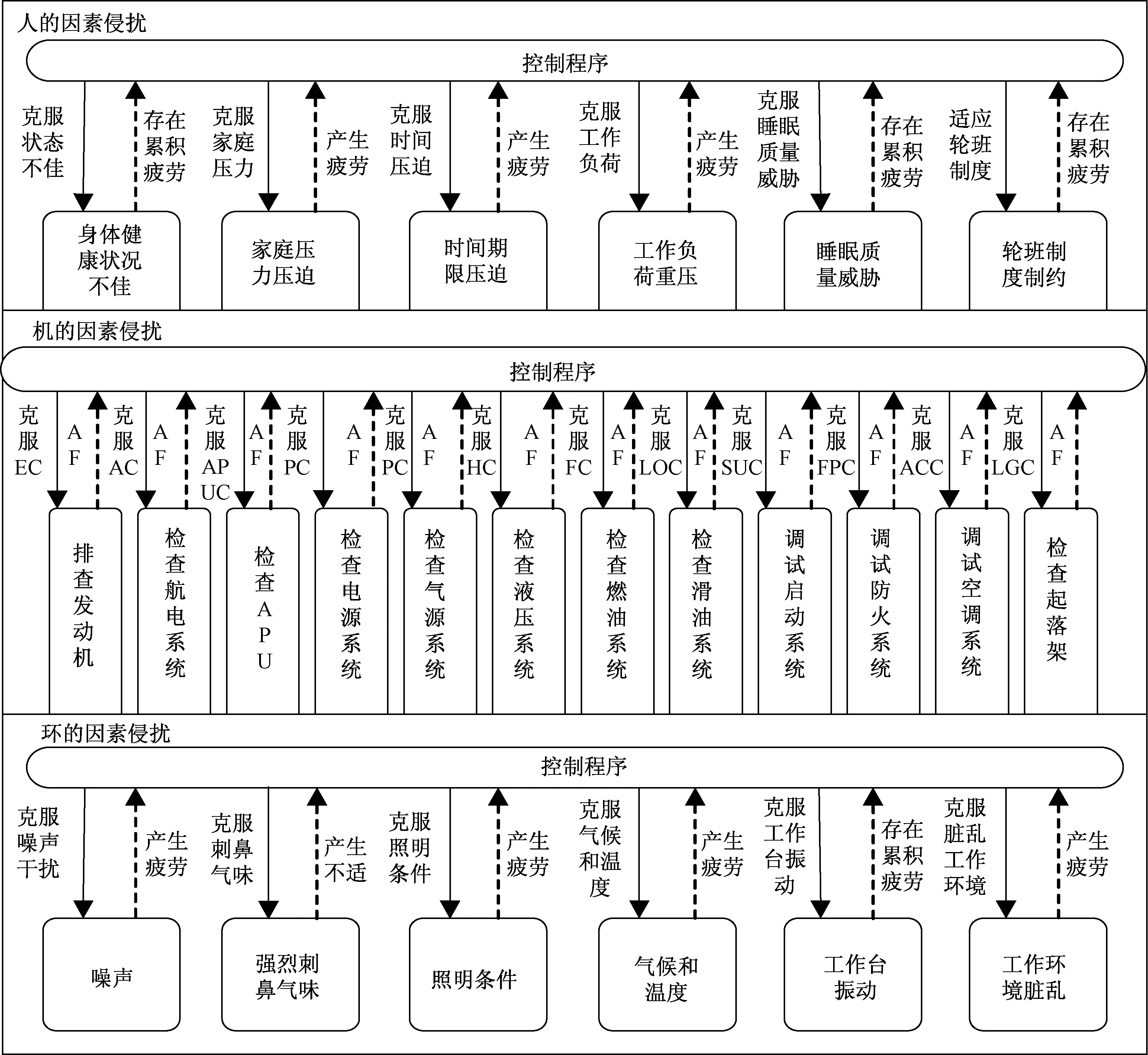
根據(jù)STPA理論,從“沒有提供”“提供”和“不正確的時間/順序”3個方面出發(fā),得到不安全控制行為(unsafe control action,UCA)。以定檢進程的控制動作為例,其中CA1~CA24分別表示定檢進程控制程序要求機務(wù)人員克服身體狀態(tài)不佳、家庭壓力、時間壓迫、工作負荷、糟糕的睡眠質(zhì)量、輪班制度、發(fā)動機復(fù)雜性、航電系統(tǒng)復(fù)雜性、APU復(fù)雜性、電源系統(tǒng)復(fù)雜性、氣源系統(tǒng)復(fù)雜性、液壓系統(tǒng)復(fù)雜性、燃油系統(tǒng)復(fù)雜性、滑油系統(tǒng)復(fù)雜性、啟動系統(tǒng)復(fù)雜性、防火系統(tǒng)復(fù)雜性、空調(diào)系統(tǒng)復(fù)雜性、起落架復(fù)雜性、噪聲干擾、刺鼻氣味、照明條件、氣候和溫度、工作臺振動、臟亂工作環(huán)境。通過分析得到72個疲勞致因,如表3所示。
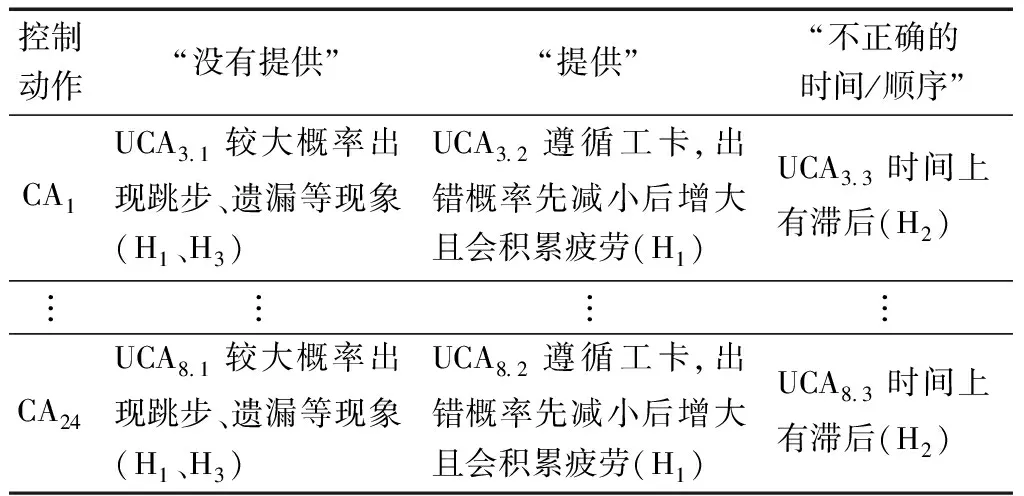
表3 機務(wù)人員疲勞致因表
3.4 控制算法
控制算法[18]是控制行為的理論依據(jù),控制器會根據(jù)控制算法做出控制動作。由于統(tǒng)一建模語言(unified modeling language,UML)狀態(tài)圖能夠準確直觀地描述系統(tǒng)控制過程中的狀態(tài)轉(zhuǎn)移,使用UML狀態(tài)圖描述控制算法如圖6所示。
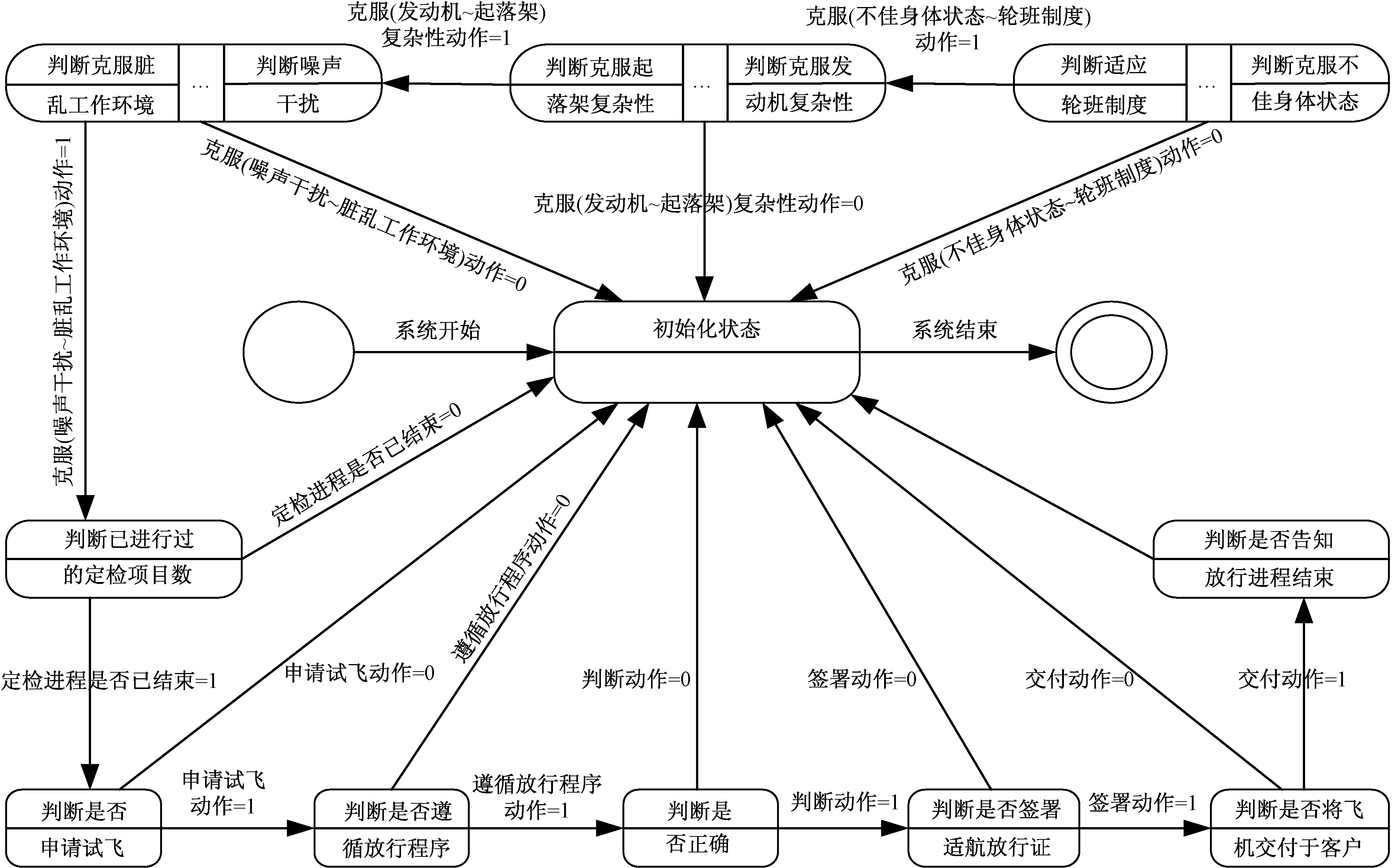
圖6 定檢階段狀態(tài)轉(zhuǎn)移
3.5 辨識出危害場景并提取相應(yīng)安全需求
3.5.1 確定可變指數(shù)
建立評價指標體系:根據(jù)一級指標對STPA模型中各回路的交互劃分二級指標,如控制動作交互、被控方交互和反饋交互3個影響因素。以CL3為例,建立定檢進程STPA的可變指數(shù)評價體系如表4所示。
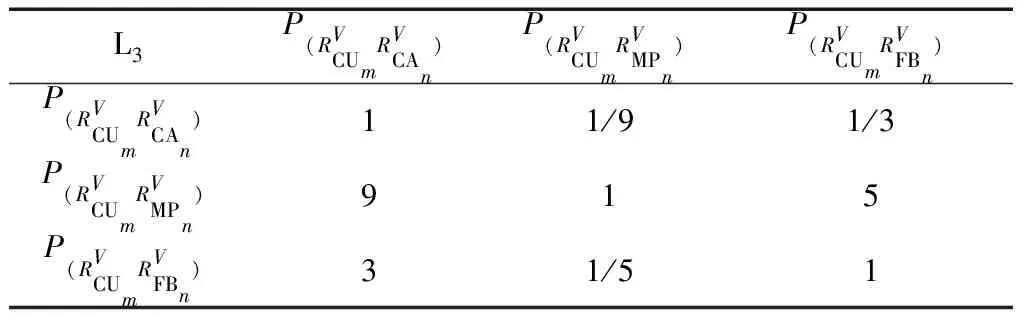
表4 CL3回路交互評判矩陣
由式(1)~式(3)求得特征向量w1=[0.07,0.75,0.18],由式(4)得λmax=3.029,經(jīng)查表得3階矩陣平均隨機性一致性指標RI=0.58,故由圖3得CR=0.025<0.1,表明一致性可接受。
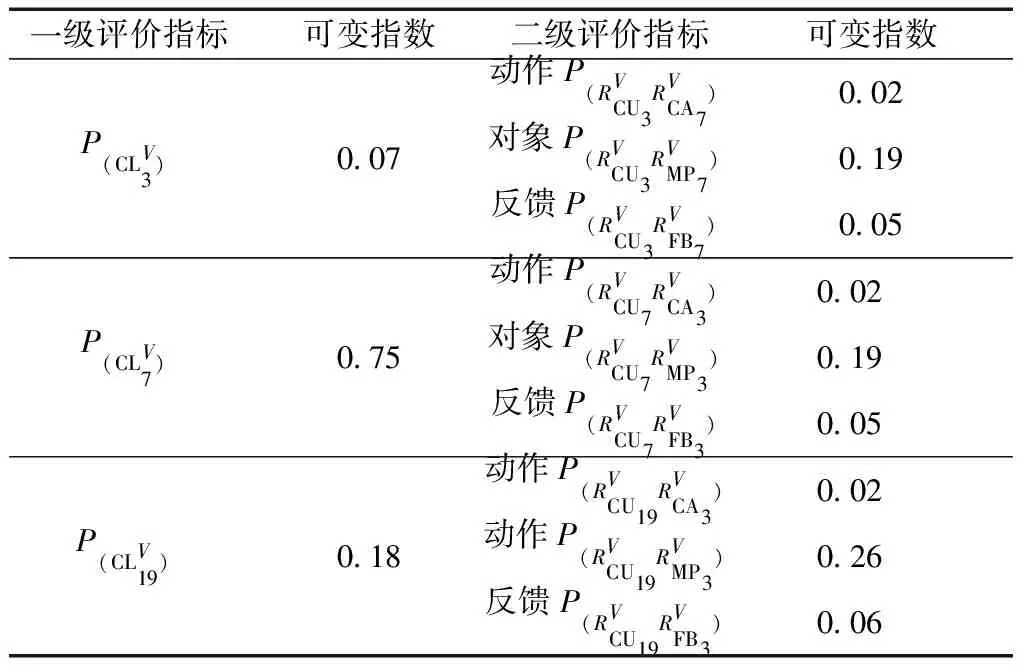
表5 定檢進程可變指數(shù)
3.5.2 制定安全規(guī)范
基于圖6定檢階段狀態(tài)轉(zhuǎn)移圖制定出11條對應(yīng)的機務(wù)人員疲勞管理規(guī)范,如表6所示。
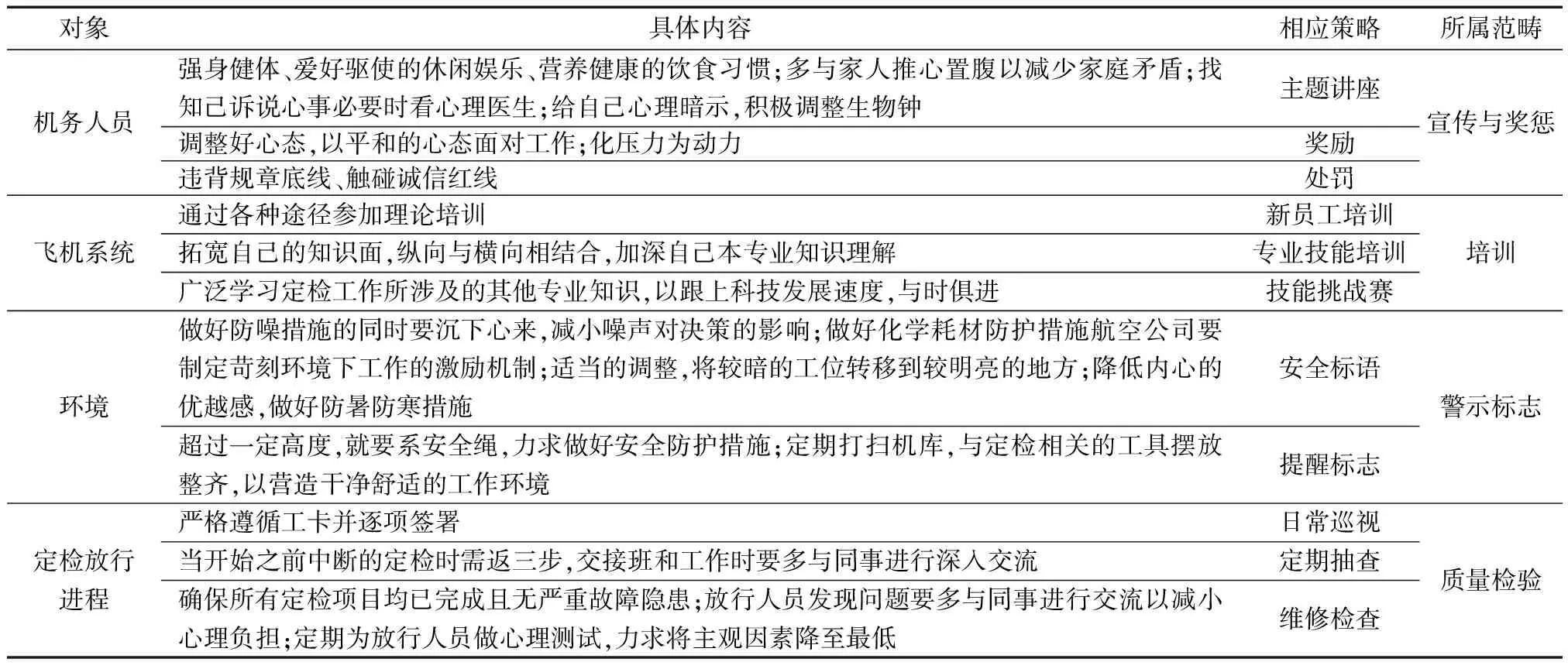
表6 安全規(guī)范
4 改進的STPA模型演繹
UPPAAL[19]是一個基于時間自動機的形式化驗證工具,包括編輯器、模擬器及驗證器。其理論基礎(chǔ)時間自動機(timed automata,TA)在數(shù)學(xué)上被定義為一個六元組TA=〈S,S0,Σ,X,I,E〉,其中,S為有窮位置集合,S0為初始位置集合,Σ為有窮事件的集合,X為有窮時鐘的集合,I為一個映射,它給每個狀態(tài)s∈S指定時鐘約束集合Φ(x)中的一個時間約束δ,E?SΣΦ(x)2xS表示狀態(tài)轉(zhuǎn)移的集合[20]。圖7、圖8分別為定檢進程和人-機-環(huán)誘導(dǎo)的UPPAAL模型。
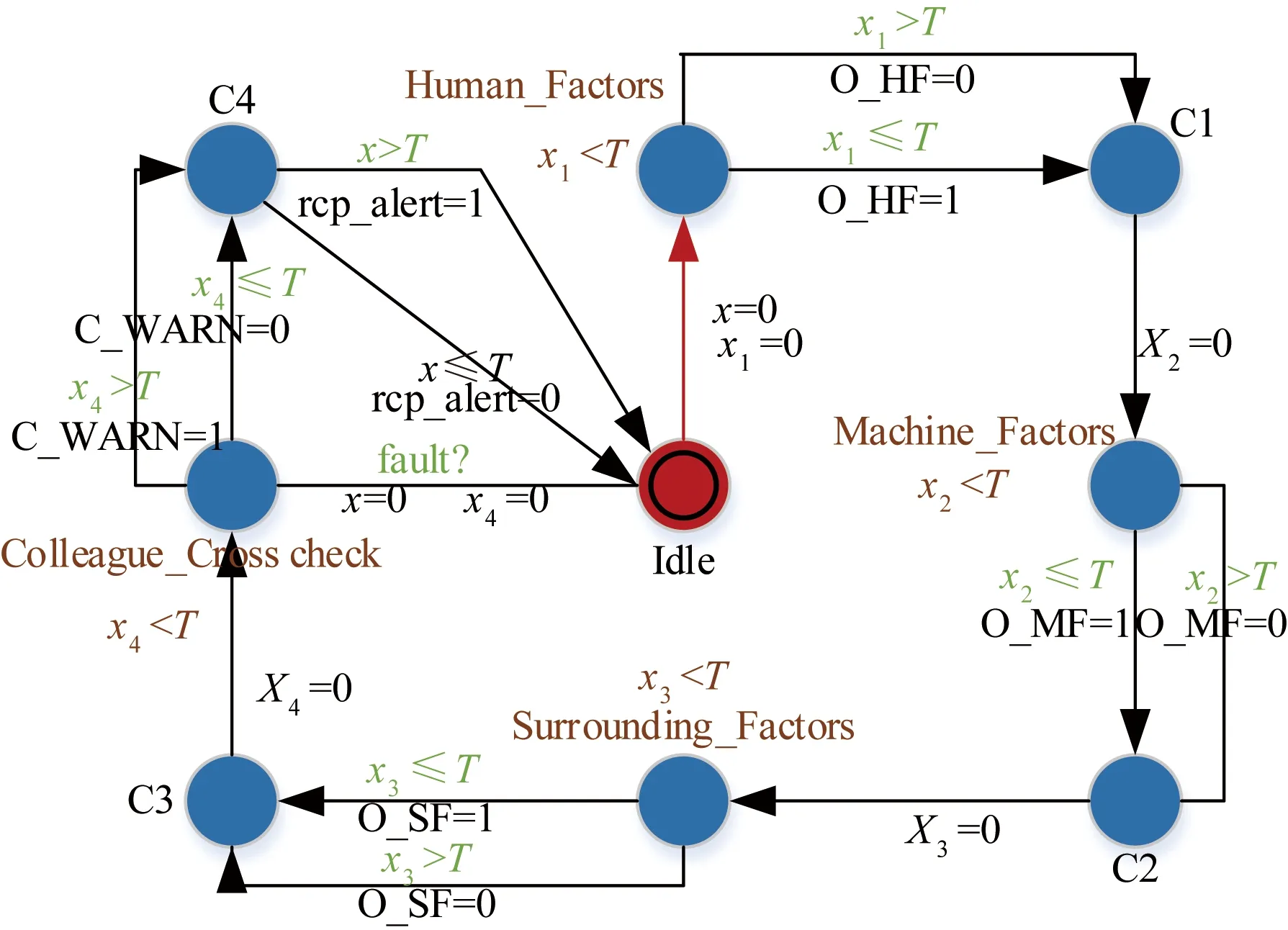
rcp_alert表示定檢進程告警;Human_Factors表示人的因素;Machine_Factors表示機的因素;Surrounding_Factors表示環(huán)的因素;O_HF表示克服人的因素;O_MF表示克服機的因素;O_SF表示克服環(huán)的因素;Colleague_cross check表示同事交叉檢查;C_WARN表示同事警告
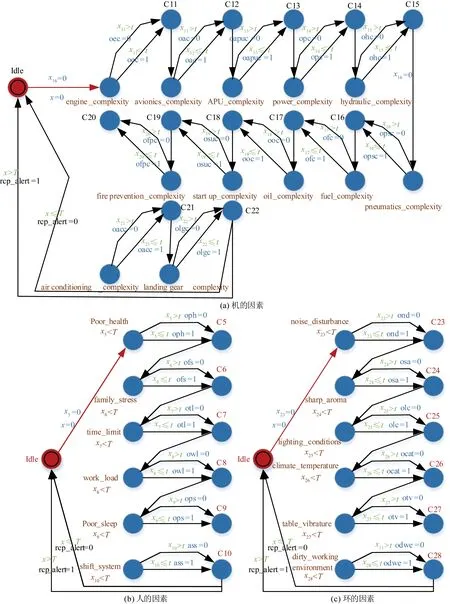
Poor_health表示身體狀態(tài)不佳;Oph表示克服身體狀態(tài)不佳;Family_stress表示家庭壓力;Ofs表示克服家庭壓力;Time _limit表示時間壓迫;Otl表示克服時間壓迫;Workload表示工作負荷;Owl表示克服工作負荷;Poor_sleep表示糟糕睡眠質(zhì)量;Ops表示克服糟糕睡眠質(zhì)量;Shift_system表示輪班制度;Ass表示適應(yīng)輪班制度;Engine_complexity表示發(fā)動機復(fù)雜性;oec表示克服發(fā)動機復(fù)雜性;avionics_complexity表示航電系統(tǒng)復(fù)雜性;oac表示克服航電系統(tǒng)復(fù)雜性;APU_complexity表示復(fù)雜性;oapuc表示克服APU復(fù)雜性;power_complexity表示電源系統(tǒng)復(fù)雜性;opc表示克服電源系統(tǒng)復(fù)雜性;hydraulic_complexity表示氣源系統(tǒng)復(fù)雜性;ohc表示克服氣源系統(tǒng)復(fù)雜性;pneumatic system_complexity表示液壓系統(tǒng)復(fù)雜性;opsc表示克服液壓系統(tǒng)復(fù)雜性;fuel_complexity表示燃油系統(tǒng)復(fù)雜性;ofc表示克服燃油系統(tǒng)復(fù)雜性;oil_complexity表示滑油系統(tǒng)復(fù)雜性;ooc表示克服滑油系統(tǒng)復(fù)雜性;start up_complexity表示啟動系統(tǒng)復(fù)雜性;osuc表示克服啟動系統(tǒng)復(fù)雜性;fire prevention_complexity表示防火系統(tǒng)復(fù)雜性;ofpv表示克服防火系統(tǒng)復(fù)雜性;air conditioning_complexity表示空調(diào)系統(tǒng)復(fù)雜性;oacc表示克服空調(diào)系統(tǒng)復(fù)雜性;landing gear_complexity表示起落架復(fù)雜性;olgc表示克服起落架復(fù)雜性;noise_disturbance表示噪音干擾;ond表示克服噪音干擾;sharp_aroma 表示刺鼻氣味;osa表示克服刺鼻氣味;lighting_conditions表示照明條件;olc表示克服照明條件;climate_and_temperature表示氣候和溫度;ocat表示克服氣候和溫度;table_vibration表示工作臺振動;otv表示克服工作臺振動;dirty_working_environment表示臟亂工作環(huán)境;odwe表示克服臟亂工作環(huán)境
定檢模塊UPPAAL模型通過時鐘變量對各組件的工作狀態(tài)進行區(qū)分,t為模塊工作的最大時間限制,當(dāng)時鐘變量小于或等于t時,機務(wù)人員克服掉干擾因素,模塊處于正常工作狀態(tài),當(dāng)時鐘變量大于t時,機務(wù)人員克服干擾因素失敗,模塊處于延時狀態(tài)。
綜上,建立了完整的RCP系統(tǒng)時間自動機網(wǎng)絡(luò)模型,其中:Human_Factors為人的因素,Machine_Factors為機的因素,Surrounding_Factors為環(huán)的因素。
RCP=Human_Factors||Machine_Factors||Surrounding_Factors
(5)
基于表7系統(tǒng)驗證語句對定檢進程進行形式化驗證,定檢進程形式化驗證結(jié)果的部分展示如下。

表7 系統(tǒng)驗證語句
A[](normalRCP.Colleague_Crosscheck and normalRCP.C4)imply(normalRCP.Idle)
驗證費時/kernel費時/總費時:0.031 s/0 s/0.047 s.
常駐內(nèi)存/虛擬內(nèi)存的使用峰值:8 956 KB/29 308 KB.
滿足該性質(zhì).
A[](normalRCP.Human_Factors and normalRCP.C1)imply(normalRCP.Machine_Factors)
驗證費時/kernel費時/總費時:0.047 s/0 s/0.047 s.
常駐內(nèi)存/虛擬內(nèi)存的使用峰值:8 984 KB/29 368 KB.
滿足該性質(zhì).
A<>(normalRCP.Idle or normalRCP.Human_Factors or normalRCP.Machine_Factors or normalRCP.Surrounding_Factors)
驗證費時/kernel費時/總費時:0 s/0 s/0 s.
常駐內(nèi)存/虛擬內(nèi)存的使用峰值:8 984 KB/29 368 KB.
滿足該性質(zhì).
5 結(jié)論
(1)在分析出的所有72種疲勞致因中,時間壓迫和噪音干擾的交互回路發(fā)生變異的可能性最大,即機務(wù)人員極易在時間壓力和噪聲干擾下產(chǎn)生疲勞。從宣傳與獎懲、培訓(xùn)、警示標志和質(zhì)量檢驗四方面制定出11條機務(wù)人員疲勞管理規(guī)范。
(2)利用形式化工具UPPAAL演繹出人-機-環(huán)因素對機務(wù)人員疲勞的誘導(dǎo)機制以及機務(wù)人員疲勞對定檢模塊的影響機制,演繹結(jié)果準確。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中國外匯(2019年20期)2019-11-25 09:54:58
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
民主與科學(xué)(2014年3期)2014-02-28 11:23:03
教育與職業(yè)(2014年7期)2014-01-21 02:35:04