玉米聯(lián)合收獲機(jī)傳動系統(tǒng)優(yōu)化設(shè)計(jì)
2022-12-16 01:07:22陳國輝
農(nóng)機(jī)使用與維修 2022年12期
陳國輝
(榆樹市環(huán)城鄉(xiāng)綜合服務(wù)中心,吉林 榆樹 130400)
0 引言
農(nóng)業(yè)機(jī)械化是實(shí)現(xiàn)農(nóng)業(yè)生產(chǎn)效率提升的主要途徑之一,是提升農(nóng)業(yè)市場競爭力的重要技術(shù)支撐,目前農(nóng)業(yè)機(jī)械化正在向大功率、智能化和復(fù)合化方向發(fā)展。玉米是我國主要糧食作物和畜牧飼料之一,在我國種植面積廣泛,隨著農(nóng)業(yè)機(jī)械化水平的提高,我國玉米總產(chǎn)量正在穩(wěn)步發(fā)展。據(jù)統(tǒng)計(jì),截止到2019年,我國玉米機(jī)械化收獲比例超過70%[1]。
我國玉米收獲機(jī)主要以國外進(jìn)口為主,自主研發(fā)的玉米收獲機(jī)主要是通過依靠國外產(chǎn)品相關(guān)經(jīng)驗(yàn)優(yōu)化而成,在實(shí)際應(yīng)用過程中,會存在結(jié)構(gòu)不合理、自動化和智能化水平較低等問題。如在田間工作過程中,機(jī)械載荷容易發(fā)生變化,導(dǎo)致連接部件和傳動部件容易出現(xiàn)變形和故障等[2],嚴(yán)重影響玉米收獲機(jī)收獲效率。
玉米聯(lián)合收獲機(jī)收獲功率與收獲效率主要取決于傳動系統(tǒng)的自動化水平,其結(jié)構(gòu)參數(shù)與工作性能直接影響玉米聯(lián)合收獲機(jī)各個部件的功率分配[3]。因此,優(yōu)化玉米聯(lián)合收獲機(jī)傳動系統(tǒng)對于提高玉米聯(lián)合收獲機(jī)的可靠性與收獲效率具有重要意義。
1 國內(nèi)外研究現(xiàn)狀
1.1 國外研究現(xiàn)狀
國外農(nóng)業(yè)機(jī)械化研究起步較早,在20世紀(jì)20年代,澳大利亞成功研制世界第一臺玉米聯(lián)合收獲機(jī),經(jīng)過不斷優(yōu)化與改進(jìn),逐漸推廣到世界各個國家與地區(qū)。傳動系統(tǒng)是影響玉米收獲機(jī)田間工作效率的重要部件,其結(jié)構(gòu)合理性直接影響玉米收獲機(jī)的工作可靠性、動力分配合理性和機(jī)械使用壽命,因此,相關(guān)研究人員及企業(yè)對傳動系統(tǒng)開展了大量的研究。
國外對玉米聯(lián)合收獲機(jī)變速箱研究較多,主要集中在無級變速裝置的傳動性能、功率分配和控制手段等方面。后期,針對玉米喂入量的問題,相關(guān)學(xué)者研發(fā)一種馬達(dá)液壓式控制系統(tǒng),通過傳感器反饋玉米收獲機(jī)田間行進(jìn)速度與設(shè)定速度之間的偏差,實(shí)現(xiàn)玉米聯(lián)合收獲機(jī)的自動調(diào)速,后期Robert J將機(jī)械傳動系統(tǒng)改為液壓傳動系統(tǒng),通過電磁閥調(diào)整凹版間隙、機(jī)器行進(jìn)速度和風(fēng)機(jī)轉(zhuǎn)速等,并通過FLC反饋信號實(shí)現(xiàn)精度調(diào)節(jié)與自動控制,可以顯著提高玉米聯(lián)合收獲機(jī)田間工作效率與工作可靠性,進(jìn)而提升了整機(jī)自動化水平,為后期玉米聯(lián)合收獲機(jī)智能化發(fā)展奠定了良好的技術(shù)條件與基礎(chǔ)[4]。
綜上所述,國外農(nóng)業(yè)機(jī)械發(fā)展較早,相關(guān)學(xué)者與企業(yè)對玉米聯(lián)合收獲機(jī)傳動系統(tǒng)的研究較為全面,通過不斷優(yōu)化與升級,玉米聯(lián)合收獲機(jī)技術(shù)相對更為成熟,已經(jīng)實(shí)現(xiàn)玉米聯(lián)合收獲機(jī)的自動化,并向智能化邁進(jìn)。
1.2 國內(nèi)研究現(xiàn)狀
我國玉米收獲機(jī)最早是從國外引進(jìn),對其進(jìn)行仿制與研發(fā),目前已經(jīng)形成了我國自主研發(fā)的相關(guān)產(chǎn)品,并通過不斷優(yōu)化升級不斷提高機(jī)器質(zhì)量。國內(nèi)學(xué)者與專家針對目前玉米收獲機(jī)結(jié)構(gòu)設(shè)計(jì)不合理和自動化水平偏低等問題開展了大量研究。
玉米聯(lián)合收獲機(jī)傳動系統(tǒng)優(yōu)化方面,對其關(guān)鍵零部件進(jìn)行了優(yōu)化設(shè)計(jì),主要包括玉米聯(lián)合收獲機(jī)傳動箱最佳傳動比,并通過理論分析與試驗(yàn)相結(jié)合的方法提出傳動結(jié)構(gòu)的優(yōu)化方案。后期,國內(nèi)外相關(guān)學(xué)者對玉米聯(lián)合收獲機(jī)傳動系統(tǒng)自動化控制進(jìn)行研究,將傳統(tǒng)機(jī)械傳動系統(tǒng)改進(jìn)為液壓機(jī)械無級變速結(jié)構(gòu),并通過理論與試驗(yàn)相結(jié)合的方法對不同工作狀態(tài)下的發(fā)動機(jī)與變速器功率分配問題進(jìn)行優(yōu)化,基于控制策略不斷調(diào)整和優(yōu)化發(fā)動機(jī)功率。
通過對國內(nèi)研究現(xiàn)狀進(jìn)行調(diào)研與分析可知,我國對玉米收獲機(jī)結(jié)構(gòu)優(yōu)化與控制策略的設(shè)計(jì)研究較少,與國外相關(guān)研究仍然存在一定的差距。近年來,我國對玉米聯(lián)合收獲機(jī)的研究更側(cè)重于自動化控制策略的分析,對傳動系統(tǒng)及其關(guān)鍵部件研究較少,因此,應(yīng)該在提升玉米收獲機(jī)自動化水平的同時提高對傳動部件的結(jié)構(gòu)優(yōu)化與設(shè)計(jì)。
2 傳動系統(tǒng)
以YF8166玉米聯(lián)合收獲機(jī)為研究對象,傳動系統(tǒng)是分配發(fā)動機(jī)動力的主要部件之一,為各個工作部件傳遞動力,實(shí)現(xiàn)功率合理分配。YF8166玉米收獲機(jī)傳動系統(tǒng)傳動路線圖如圖1所示。
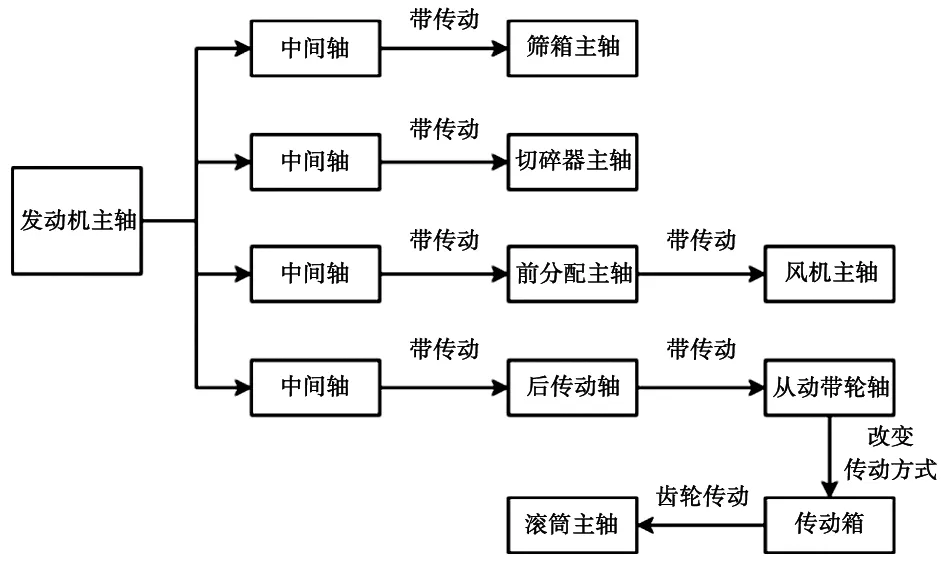
圖1 玉米聯(lián)合收獲機(jī)傳動路線示意圖
YF8166玉米聯(lián)合收獲機(jī)傳動裝置基本為帶傳動,但是由于受力不同會導(dǎo)致帶傳動發(fā)生不同的伸長量,導(dǎo)致傳動帶在工作過程中會出現(xiàn)彈性滑動等現(xiàn)象,用滑動率表示,取值范圍為1%~2%。根據(jù)帶傳動傳動比計(jì)算公式,由此推導(dǎo)出各級傳動部件實(shí)際轉(zhuǎn)速計(jì)算公式,如式(1)所示。
(1)
式中n1—主動輪轉(zhuǎn)速,r·min;
n2—從動輪轉(zhuǎn)速,r·min;
i—傳動比;
ε—滑動率,%。
當(dāng)發(fā)動機(jī)以額定轉(zhuǎn)速2 200 r·min-1,滑動率ε=1%時,各部件轉(zhuǎn)速如表2所示。

表2 各部件轉(zhuǎn)速 單位:r·min-1
3 傳動系統(tǒng)優(yōu)化方案
3.1 脫粒滾筒
傳統(tǒng)脫粒滾筒駕駛員需要通過多次操作操縱桿控制閥芯位移,進(jìn)而調(diào)節(jié)滾筒轉(zhuǎn)速。采用PLC控制液壓回路的滾筒調(diào)速方案,提高調(diào)節(jié)精度。其中,活塞缸是液壓系統(tǒng)中的執(zhí)行元件,主要性能參數(shù)包括內(nèi)徑、活塞桿徑、行程和流量等。本研究中活塞缸無級變速帶輪參數(shù)如表3所示。

表3 活塞缸、變速帶輪技術(shù)參數(shù) 單位:mm
油缸最大負(fù)載主要是指彈簧最大工作極限載荷Pj,本研究使用的彈簧極限載荷Pj=6 601 N,由式(2)和式(3)得出液壓缸工作壓力p=1.31 MPa。
(2)
(3)
式中p—液壓缸工作壓力,MPa;
F—液壓缸最大負(fù)載力,N;
A—液壓缸的有效作用面積,m2;
D0—液壓缸內(nèi)徑,m。
油缸活塞運(yùn)動符合正弦運(yùn)動,位移公式如式(4)所示,其振幅為24 mm,運(yùn)動頻率f=15~20 Hz。
x=x1sinωt
(4)
式中x—油缸位移,m;
x1—油缸活塞位移,m;
對上式求導(dǎo)后得出活塞運(yùn)動速度
v=x1ωcosωt
(5)
式中v—活塞速度,m·s-1;
ω—角頻率,ω=2πf(rad·s-1)。
由式(5)得出活塞理論最大運(yùn)動時速度vmax=3.2 m·s-1。
3.2 風(fēng)機(jī)
采用無級變速帶輪,風(fēng)機(jī)轉(zhuǎn)速與主動變速輪動盤位移之間的關(guān)系如式(6)所示。當(dāng)調(diào)節(jié)風(fēng)速為1 150 r·min-1,1 175 r·min-1,1 200 r·min-1,1 225 r·min-1時,主動變速帶輪需要分別向右移動18.150 mm,18.975 mm,19.800 mm,20.625 mm。
xz=0.038(nf-600)
(6)
式中xz—主動變速輪動盤位移,m;
nf—風(fēng)機(jī)轉(zhuǎn)速,r·min-1。
3.3 切碎器
切碎器轉(zhuǎn)速大小直接影響切碎功率和拋灑均勻度,由圖1可知,切碎器主要采用帶傳動的方式由發(fā)動機(jī)主軸通過中間軸傳送到切碎器主軸。通過前期試驗(yàn)得到4組切碎器較優(yōu)轉(zhuǎn)速,當(dāng)玉米籽粒含水率為24%~26%和39%~31%時,此時較優(yōu)轉(zhuǎn)速分別為2 175 r·min-1和2 225 r·min-1[5]。
5 玉米聯(lián)合收獲機(jī)操控策略
通過前期對YF8166玉米聯(lián)合收獲機(jī)傳動系統(tǒng)進(jìn)行優(yōu)化可知,將滾筒、風(fēng)機(jī)和切碎器進(jìn)行優(yōu)化設(shè)計(jì),再次總結(jié)出玉米聯(lián)合收獲機(jī)在不同工況下各部件轉(zhuǎn)速調(diào)節(jié)策略,如表3所示。當(dāng)玉米收獲機(jī)喂入量為8 kg·s-1,10 kg·s-1,12 kg·s-1,玉米籽粒含水率為24%~26%和39%~31%時,各部件轉(zhuǎn)速控制策略按照表3進(jìn)行調(diào)節(jié)。
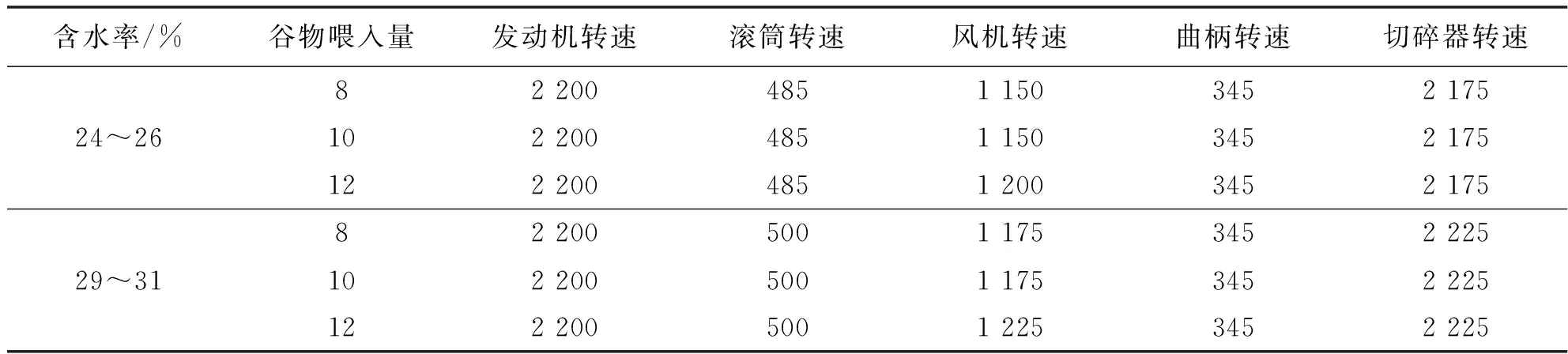
表3 玉米收獲作業(yè)時各部件轉(zhuǎn)速調(diào)節(jié)方案 單位:r·min-1
5 結(jié)論與展望
5.1 結(jié)論
針對目前玉米收獲機(jī)傳動系統(tǒng)工作效率低和傳動系統(tǒng)設(shè)計(jì)不合理等問題,對玉米收獲機(jī)傳動系統(tǒng)關(guān)鍵部件脫粒滾筒、風(fēng)機(jī)和切碎器等進(jìn)行優(yōu)化,并總結(jié)玉米聯(lián)合收獲機(jī)在不同玉米籽粒含水率和谷物喂入量時各個部件的轉(zhuǎn)速,對于提高玉米聯(lián)合收獲機(jī)控制效率與工作可靠性具有一定參考意義。
5.2 展望
傳動系統(tǒng)作為發(fā)動機(jī)傳遞動力的載體,其結(jié)構(gòu)優(yōu)化不僅可以提高發(fā)動機(jī)工作效率,還可以提高傳動系統(tǒng)的自動化水平。未來應(yīng)該根據(jù)提出的優(yōu)化方案開展大田試驗(yàn)進(jìn)行驗(yàn)證,并逐步應(yīng)用于其他谷物收獲機(jī)。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
體育科技文獻(xiàn)通報(2022年3期)2022-05-23 13:46:54
天津外國語大學(xué)學(xué)報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:24