基于模型預測控制的車道保持控制策略及對比研究*
2022-11-10 06:39:48牛少鋒葉寶林吳維敏
計算機時代 2022年11期
牛少鋒,葉寶林,吳維敏
(1.浙江理工大學信息學院,浙江 杭州 310018;2.嘉興學院信息科學與工程學院;3.浙江大學工業控制技術國家重點實驗室)
0 引言
隨著中國汽車行業和無人駕駛技術的發展,汽車行業正在大力投資開發先進的高級駕駛輔助系統(Advanced Driving Assistance System),ADAS 利用各類傳感器,如:攝像頭、雷達單元、超聲波傳感器和轉向角傳感器等進行數據采集,通過識別、偵測等技術處理,讓駕駛員及時意識到危險狀況,起到預防和降低事故頻率的作用。
車道保持輔助(LKA)系統不僅是ADAS 的重要組成部分,也是自動駕駛汽車的一個核心技術。LKA的目標為解決駕駛員疲勞駕駛而分心或注意力不集中的情況,防止車輛偏離車道而設計,保證車輛在目標車道線內依規定速度安全行駛,避免因駕駛員的不當操作而引發交通事故。針對不同的控制機構,房澤平[1]以前輪轉角作為控制器參考輸入,采用直接橫擺力矩和車道線保持的串級控制策略來保證穩定的車道線保持功能。吳乙萬[2]等提出一種基于主動轉矩分配的四輪獨立驅/制動電動車車道保持輔助控制方法,起到了防止車輛偏離目標車道的效果。無論選用哪一種控制機構,對于底層控制器來說,控制算法對車道保持輔助系統的性能影響是關鍵[3]。目前,國內外的學者基于不同控制算法的LKA 系統做了大量研究,施衛[4]等提出基于LQR 算法的車道保持控制方法,結合駕駛員意圖識別對車輛當前的行駛狀態進行判斷,幫助駕駛員糾正車輛偏離動作。董婷[5]為提高行駛的安全性,改進了單點預瞄最優曲率駕駛員模型,提出基于PID控制的車道保持控制方法。Marino等基于橫擺角速度的跟蹤誤差設計了一種嵌套PID轉向控制方法,在不確定曲率的道路情況下進行路徑跟蹤,實現了穩定的車道保持效果[6]。隨著模型預測控制(MPC)的興起,得益于處理多約束和在線優化的特性,羅莉華[7]等研究了傳統模型預測控制的轉向控制策略,迅速消除側向位移偏差和橫擺角偏差,保證車輛沿著車道中心線行駛。
綜上所述,大多數文獻主要采用傳統的PID、LQR或傳統的MPC 控制算法來實現車道保持系統。雖然它們提高了駕駛安全性,但由于缺乏處理車輛安全約束的能力,很難獲得平穩的動態響應效果。因此,本文在傳統模型預測控制理論的基礎上,設計了自適應MPC 和非線性MPC 兩種新型車道保持控制器,并在Matlab/Simulink 平臺上進行了仿真測試,比較了兩種控制器在相同路況下的總體性能。與以前的文獻相比,本文主要貢獻:①本文為LKA 系統設計了兩種MPC方案,所設計的LKA 控制器不僅能保證車輛在車道線中心行駛,而且能滿足預先設定的約束條件,具有良好的穩定性;②本文比較了兩種模型的加速度和速度曲線,就如何在確保車輛行駛安全的前提下提升乘客的舒適性和穩定性提供了指導意見。
1 系統建模
在車道保持輔助系統研究中,將車輛的動力學特性進行合理建模是一個關鍵點,通常對于車輛來講,動力學的研究,主要探討輪胎以及相關部件的受力情況,一般包括橫向、側向以及橫擺運動。這里假設懸架是剛性的,并忽略左右車輪輪胎垂直載荷的變化以及輪胎回正力矩的影響[8],主要考慮車輛的橫向運動,近似認為縱向加速為0,實際車輛將被簡化為二自由度自行車模型,如圖1所示,通過對車輛進行橫向運動受力和轉矩平衡分析,可以得到:

圖1 車輛動力學模型

其中,Iz為車輛的轉動慣量,β為質心側偏角,m為整車質量,Fyf和Fyr分別為作用在車輛前后輪的側向合力,Lf和Lr分別為車輛質心到車輛前后軸中心的距離,δf為前輪偏角,和分別為車輛的縱向加速度和橫向加速度。基于Pacejka 在汽車操縱動力學研究中提出的魔術輪胎模型[9],當車輛的側向加速度小于0.4g 時,側向力與車輛側偏角可以近似認為呈線性關系,此時輪胎的側向力可用下式表示:

其中,Cf和Cr分別為前、后輪胎的側偏剛度,αf和αr分別為前后輪胎的側偏角。
如圖2所示,在車輛行駛過程中,通過傳感模塊測量車道中心線與自駕車之間的橫向偏差e1和相對偏航角e2,以及計算前方道路的彎曲程度,目前已經有較多成熟的曲率估計裝置及算法,再通過特定的控制算法調整車輛的前輪轉向角使得e1和e2盡可能小,從而逼近于0,讓車輛保持在車道中心線行駛。相對偏航角和橫向偏差的動力學分別為=ω -vx*r。其中,r代表道路半徑曲率,ω為橫擺角速度。
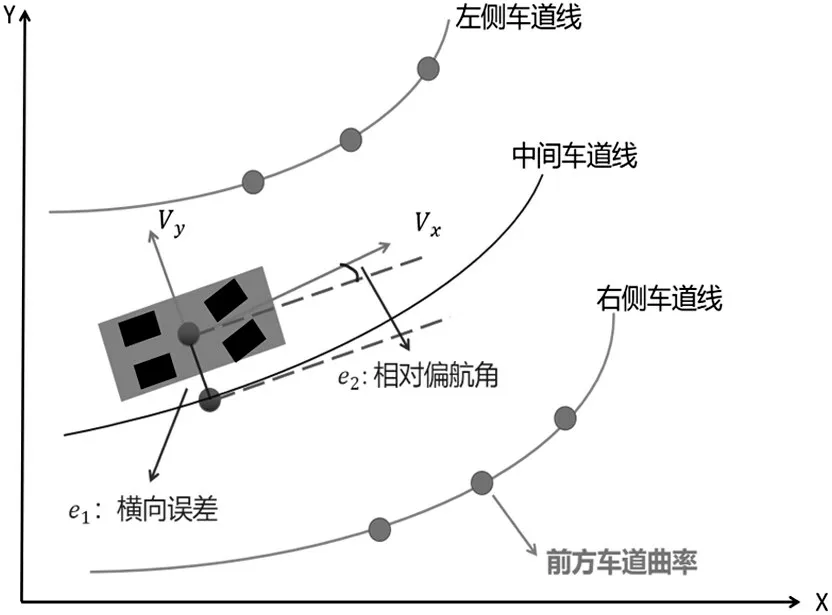
圖2 車道保持輔助原理圖
2 模型預測控制算法
模型預測控制(MPC)是一種多變量的進階過程控制策略,它的主要思想是通過解決有限時域約束最優控制問題,來找到未來行動的最佳控制序列。一般來說MPC 有三個核心步驟:預測模型、滾動優化和反饋控制,分別對應預測方程的建立、目標函數設計和約束設計三個步驟,本文建立了兩種MPC方案來實現無人駕駛車道跟隨系統。
2.1 AMPC控制器
MPC 控制一般使用線性時不變(linear time invariant)動態模型預測未來行為,通過將模型進行一定的線性化處理,在采樣時間內進行目標函數的求解,將控制序列的第一個元素作用在實際對象中,從而實現最優控制。但是在實際車輛駕駛過程中,LTI預測精度可能會出現嚴重降低的情形,以至于MPC性能變差。因此,本文設計了自適應MPC控制器來實現LKA 系統,在離散化后的每一個控制時刻工作點,不斷更新相關增益系數矩陣以及控制器的狀態來適應車輛的當前環境和狀態,以此補償模型的非線性以及未知干擾帶來的影響。
由公式⑴~公式⑶可以推導得到車輛橫向動力學的狀態微分方程,結合車身坐標系和大地慣性坐標系的轉換關系,通過高階泰勒展開方式將非線性形式轉為線性形式,轉化為MPC狀態預測方程和輸出方程形式為:

自適應MPC 控制器預測時域設為10,控制時域設為2,通過控制前輪轉角實現側向速度和橫擺角速度的輸出。
2.2 NMPC控制器
非線性模型預測控制的原理與傳統的線性MPC一樣,使用基于模型的預測和約束優化的組合來計算每個控制間隔的控制動作。然而,預測模型可能是高度非線性的并且有可能包含時變參數,本文通過使用非線性MPC 方法,在非線性成本和約束條件下,求解開環約束非線性優化問題來實現LKA 系統,引入常數τ 來近似表征動力學特性,將預測的前方道路曲率與縱向速度的乘積來作為測量擾動,轉化為NMPC 的狀態預測方程和輸出方程形式為:

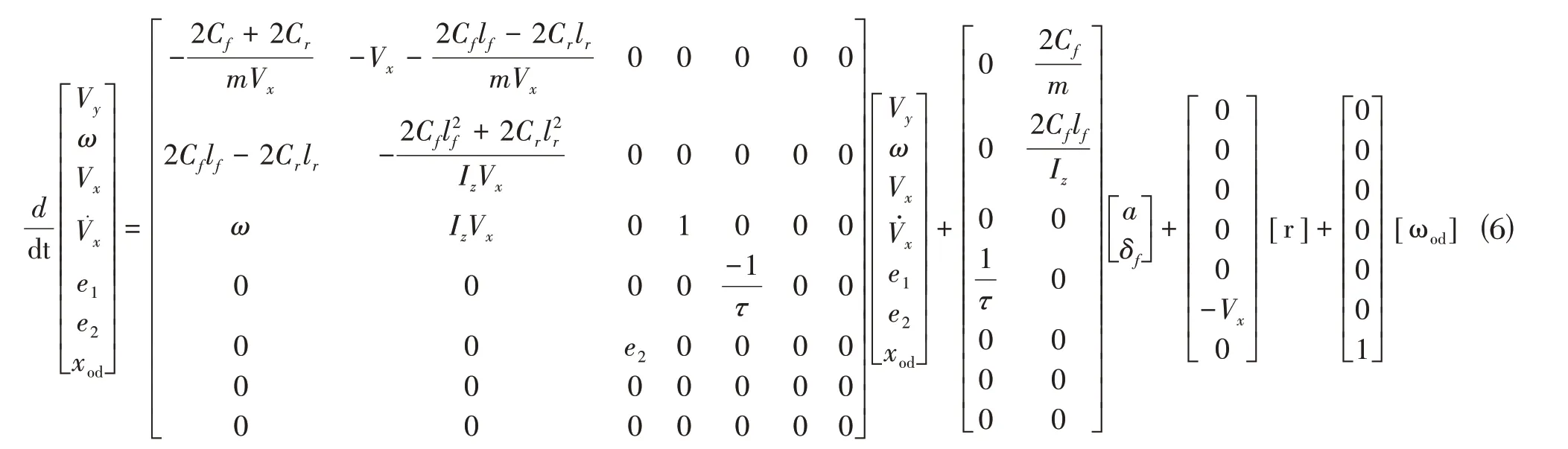
其中,r表示預測道路曲率,ωod表示白噪聲來作為測量擾動,xod作為輸出干擾添加到e2的輸出中。通過控制加速度和前輪轉角兩個控制量,實現縱向車速、相對偏航角以及橫向誤差三個變量的輸出。
3 實驗結果與分析
為驗證所設計的MPC 算法的車道保持系統,在Matlab/Simulink[10]平臺搭建仿真環境,為達到駕駛員轉向命令和車道保持控制器之間能夠隨意切換的效果,加入車道檢測數據模塊,設置安全橫向距離為1m,采用自定義二維道路場景進行模擬,仿真模型框架圖如圖3所示。
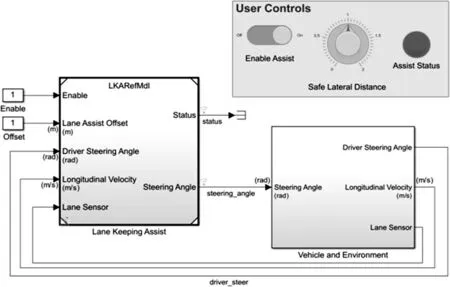
圖3 Matlab/Simulink仿真模型
LKA 控制器的橫向位移偏差、相對偏航角、轉向角隨時間的變化情況,如圖4 所示。可以看到橫向偏差在[-0.5,0.5]范圍內波動,橫擺角偏差在[-0.15,0.15]范圍內波動,同時,車輛前輪轉向角也在MPC設計約束范圍[-0.5,0.5]范圍內,表明所設計的LKA 系統可以保證車輛在車道中心安全行駛,并且有較好的穩定性。
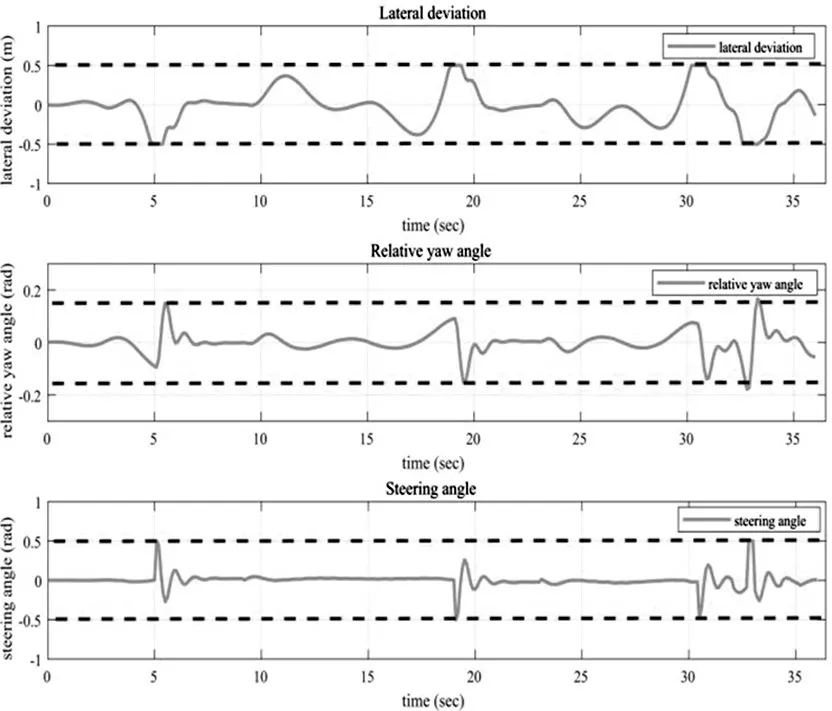
圖4 LKA系統性能曲線圖
圖5 表明了所設計的LKA 系統和車道偏離檢測的實時狀態,可以明顯看到在5.5s、19s、31s、33s 附近檢測到車道偏離,此時LKA 系統開啟,在短暫時間后車輛回歸車道中心。即駕駛員可以正確駕駛車輛時,控制權會返回給駕駛員,此時LKA系統關閉。

圖5 LKA與車道偏離狀態變化圖
此外,設置仿真時間15s、縱向速度為20m/s、縱向加速度約束為[-3,3]、e1 和e2 約束均為[-0.5,0.5],觀察相同條件下基于AMPC 和NMPC 兩種控制策略下的車道保持輔助系統性能。
兩種LKA 系統的MPC 控制器的轉向角、橫向偏差和相對偏航角隨時間變化的數據對比如圖6 所示,AMPC 和NMPC 的橫向偏差和相對偏航角范圍均在[-0.095,0.075]與[-0.06,0.02]之內,符合設定約束之內,從直觀上看,兩種控制器均能夠很好的實現LKA 系統,車輛正在沿著期望的路徑行駛。為了進一步比較兩種控制器的性能,提取了兩種模型的加速度和速度變化曲線,如圖7所示,NMPC 的曲線相對AMPC 更加平滑一些,這表明NMPC 控制器在加速度執行和速度追蹤方面表現得更為平穩,在保證車輛行駛安全性的前提下,可以提供更好的舒適性和穩定性。
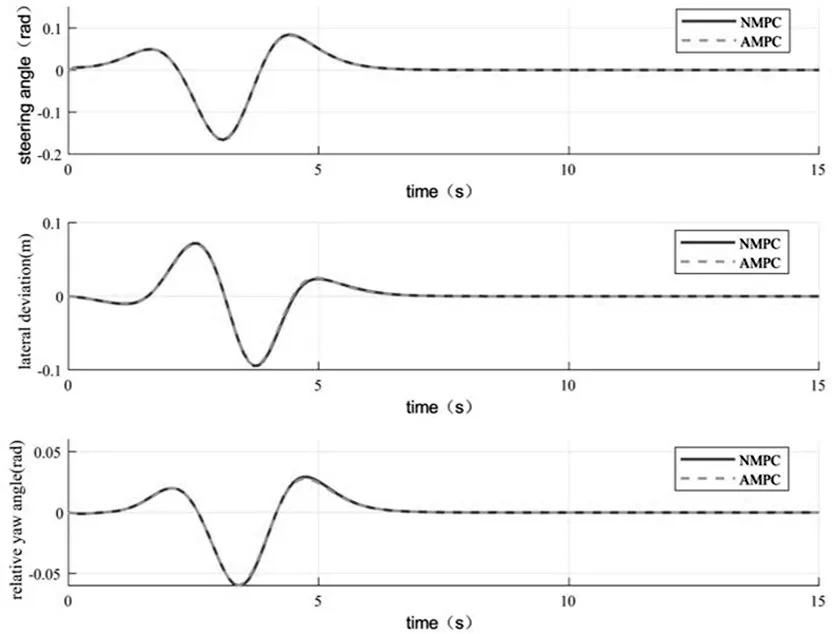
圖6 轉向角、橫向偏差和相對偏航角對比圖
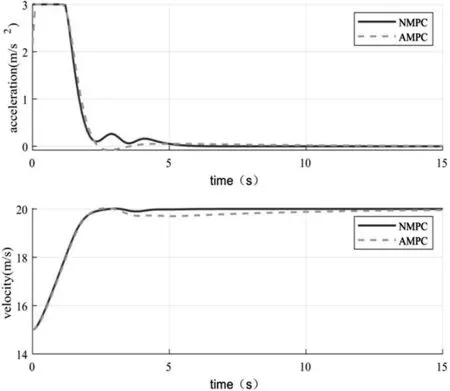
圖7 AMPC與NMPC加速度與速度曲線對比圖
4 結束語
本文通過對車輛橫向動力學進行合理建模,引入車道檢測模塊,基于傳統模型預測控制理論,建立了自適應MPC 和非線性MPC 兩種控制器,實現了車道保持輔助系統,實驗結果表明:在發生車道偏離時,所設計的LKA 系統可以及時幫助駕駛員調整前輪轉向,回歸車道中心。此外,NMPC 模型相對于AMPC 模型具有更平滑的加速度和速度指令,一定程度上給予乘客更好的穩定性和舒適性。但是NMPC 要求處理系統的計算性能較高,花費時間較長,未來將從實時性與穩定性兩者綜合的角度出發,進而實現高性能、高效率的LKA系統控制方案。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19