基于無靶標圖像的軌道交通隧道內積水檢測技術
2022-11-05 12:26:06李明洪劉宏
鐵道建筑 2022年10期
李明洪 劉宏
廈門軌道建設發展集團有限公司,福建 廈門 361000
伴隨著我國經濟社會不斷發展、城鎮化集群進程不斷加快,地鐵交通以其便捷性、準時性、運輸量大、安全可靠、低耗環保等特點,在我國公共交通運輸中占據著越來越重要的地位。伴隨著軌道交通運輸線路的快速擴張,各類安全事故時有發生。近年因強降雨、地質因素等引發的滲漏水導致的隧道積水事故頻發。特別是2021年7月河南鄭州的一場特大暴雨,再次突顯了城市軌道交通發生嚴重積水的危害性和城市防汛設施建設的重要性,也對軌道交通積水監測系統的實時性和主動性提出了更高要求。
基于無靶標圖像的積水檢測技術已比較成熟,廣泛應用于道路、機器人避障等場景,如常規道路積水檢測、機器人野外積水檢測、管道淤堵積水檢測[1-4]等。但在城市軌道交通中,由于積水無明顯識別特征,大多數基于無靶標圖像的積水檢測系統識別準確性較差,問題在于觀測范圍較小,區域特征不明顯。在沒有擴大監測范圍及增強區域特征的情況下,通常的解決方案是增加靶標來提高系統的可靠性,通過對靶標的狀態識別來檢測某區段的積水,屬于單點式檢測[5]。因需設置靶標,再加上識別范圍窄,所以這種方法僅適用于重點小區段的積水檢測,無法大規模應用。考慮地鐵隧道的實際環境,結合廈門地鐵安全自動巡檢系統的部署,本文介紹一種可大規模應用于軌道交通的基于無靶標圖像的積水檢測技術。
1 無靶標圖像積水檢測技術
1.1 視覺原理
光波是在原子運動過程中由電子產生的電磁輻射。而光譜(光學頻譜)是復色光經過棱鏡、光柵等光學設備分光后,被色散開的單色光按波長(或頻率)大小依次排列的圖數據。光譜中肉眼可感知的波長在780~400 nm的電磁輻射被稱作可見光[6],由紅、橙、黃、綠、藍、靛、紫依次分布的多色光構成。
光譜分辨率在10-2λ(其中λ為波長)數量級范圍內的光譜圖像稱之為高光譜圖像[7]。高光譜成像技術是基于大量較高波段光譜區域中窄波段成像數據的疊加技術。該技術是成像技術與光譜技術的結合,對目標空間區域投影成像的同時,對每個三維區域像元經過色散形成多達上百個窄波段光譜以進行連續的光譜覆蓋。研究目標的二維幾何數據及一維光譜數據,獲取高光譜分辨率下連續窄波段圖像數據,由此構成的數據也可用三維數據塊形象地說明[8]。對于探測目標,不同譜段的影像信息所反映的數據具有一定的差異特征,經過對光譜圖像的處理,能準確地獲取探測目標的各種識別信息,從而實現有效的物體識別。
本文所述的無靶標圖像積水檢測系統是基于高波段補光模塊對當前視野區段的覆蓋,利用高光譜圖像捕捉系統采集該區域的光譜圖像信息,AI(Artificial Intelligence)算法模塊再對圖像特征區域進行提取、模型庫智能匹配和圖像識別,最終實現對積水變化區域的有效監測。
1.2 積水特性
1.2.1 水的光譜特征
水的光譜特征體現在對光譜的吸收、透射和反射特性上,主要是由水自身物理特性決定的,同時也受水的各類狀態的影響。對于0.4~2.5μm波段的電磁波吸收特性,相對純凈的自然水體明顯強于在該區域下的其他物質。在光譜的可見光波段內,水體中蘊含的多種能量物質相互作用情況較為復雜,通常情況下,水的光譜反射特性主要受三個方面影響:水體表面物質、水體底部區域物質和水體懸浮物質。在對常規水體的研究中,光譜的吸收與透射特性不僅與水體自身的特性有關,而且顯著地受到水中各類有機物及無機物的影響[9]。
在光譜的近紅外、中紅外波段里,水幾乎吸收了所有的能量。在近紅外波段圖像中,相對較純凈的自然水體更趨近于一片“黑體”區域。因此,在這個波段下的較純凈自然水體的反射率非常低,甚至可以忽略。
設備壽命縮短是因為通過“啟/停循環”加載/卸載設備使制冷系統輸出容量匹配數據中心的制冷需求。在“啟/停循環”模式下每啟動一次電機,電機繞組將經歷一次較大的啟動電流,并讓電機承受較大的應力,從而縮短電機壽命。由于電機從怠速、加速至全速需要加大轉矩,因此電機的啟動電流可能高達電機滿載電流的10倍。相反,變頻器可以具有“軟啟動功能”,可以讓電機緩緩加速至需要的工作速度。它可減小施加到電機上的機械和電氣應力,降低維護和維修成本,同時延長電機使用壽命。
相比于純凈的自然水體,渾濁泥沙(泥沙含量>800 mg∕L)在550~750 nm波段內反射率較高(>10%),且反射率隨著泥沙含量的增加而提高。當泥沙達到一定濃度時,反射率趨于穩定[10]。
1.2.2 隧道積水特征
軌道交通中的積水常發生在隧道區間,該區段的積水主要由強降雨、施工滲漏水、消防管道泄露等導致,鄭州地鐵黃河路站積水見圖1。積水常含有泥沙,使得水呈現渾濁狀態,除水表面鏡面反射外,水體懸浮物及底部區域物質也具有一定的反射和吸收作用。利用高波段補光系統覆蓋檢測區域,可以發現:無積水區域的圖像相對明亮,有積水區域的圖像會根據不同水質呈現出不同程度的暗斑。隧道中的積水常是較為渾濁的水質,其暗斑程度較淺,圖像檢測系統可以根據暗斑特征甄別是否存在積水現象。

圖1 鄭州地鐵黃河路站積水
1.3 系統架構
無靶標圖像積水檢測系統主要包含三個部分:前端光譜圖像采集系統、前端高頻率補光系統、后臺算法處理系統。
1)前端光譜圖像采集系統
該系統主要是指高光譜圖像信息采集器(圖2),核心感光元件采用1∕8英寸Progressive Scan CMOS,最低照度0 Lux with IR,像素3 840×2 160,配置特定可調偏光元件,可分類采集可見光及特定高光譜波段的圖像信息。

圖2 前端光譜圖像采集器
2)前端高頻補光系統
軌道交通隧道內常為間距性白光補光,可對水面鏡面波動的補光起一定的輔助作用。但由于隧道區間較長,既有補光系統無法滿足全區段的積水檢測需求,通過追加高頻補光系統可有效實現監測區段全域覆蓋。輔助高光譜圖像采集器,通過被監測物質的反射特征(高光譜特征及鏡面燈光反射特征)來實現積水的有效監測。高光譜圖像采集器與補光系統均集成于圖2所示結構中。
3)后臺算法處理系統
后臺算法處理系統以X86架構服務器為硬件核心載體,運行光譜圖像處理算法。通過前端光譜圖像采集設備傳輸給服務器的數據信息進行積水的光譜特征分析。把特定光譜下的反射數據與基礎模型數據進行比對,反映出該區域的明暗變化波動,設定特定的積水特性閾值,反饋特性分析結果,識別出區域積水塊。算法處理系統流程見圖3。
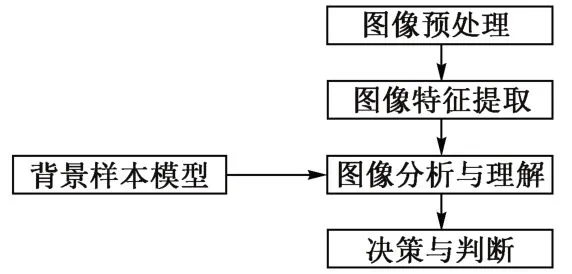
圖3 算法處理系統流程
圖像預處理包含椒鹽噪聲、高斯噪聲的濾除,圖像對比度的增強和形態學處理。由于在特定激光及圖像采集系統中的圖像積水特性具有與背景樣本模型較大的差異化特征,可較為容易提取出無規則的積水特征。
圖像分析與理解是建立在背景樣本模型及特征提取基礎上的,利用積水特征及隧道背景樣本的先驗條件,改善VIBE(Visual Background Extractor)算法對積水特征的識別性。VIBE算法是一種基于鄰域像素統計的圖像數據流序列前景的檢測算法。由于其僅使用中心像素的8鄰域隨機值建立樣本值,所以大大簡化了背景提取流程,可適用于實時檢測、運動檢測的場景。該算法的基本思想可概括為:背景樣本的初始化;像素分類;背景樣本模型實時更新。這樣可有效減少其他光線特征可能產生的干擾而導致錯誤的判斷。
算法處理系統的核心在于背景模型機制建立、像素分類以及背景模型刷新機制。背景模型機制的建立是為圖像中每個像素點建立各自的樣本集,即

式中:x為當前幀圖像的一個像素點;S(x)為像素點x的樣本集合;PN為x的樣本值。
像素分類在圖像層面上是對圖像背景區塊的劃分,而劃分成不同背景區塊的依據則是基于2維度的歐式空間,即

式中:SR[pt(x)]為像素值p t(x)的歐式空間集;R為像素點間的歐式距離;Umin為設定的最小歐式距離值。
基于R,把當前像素點x的像素值p t(x)與背景樣本集中的樣本值進行比較,結果納入近似樣本像素點區域塊,以此與Umin判斷得出背景像素區域。
背景模型的更新機制解決了因時間推移視頻圖像的背景發生改變的問題。光照的變化、樹葉飄落、相機晃動等都會引起背景發生一定程度的改變。式(3)表明在(t,t+dt)時刻內,背景樣本集中的某樣本值沒有因時間因素而更新,與時間t不相關。這是一種無記憶策略,更有利于背景保真。

式中:P(t,t+dt)為時間變化下的樣本值函數,n為圖像序列值,t為時間。
2 系統測試
無靶標圖像積水檢測系統已在廈門軌道交通1號線試車線開展技術驗證工作。通過在隧道處搭建一段長約6 m、寬約2 m的水床模擬實際積水環境。當水面有波動而產生光影時視覺覆蓋區域受補光系統投射的影響,實時采集的光譜圖像產生明暗變化的區域。現場識別效果見圖4。
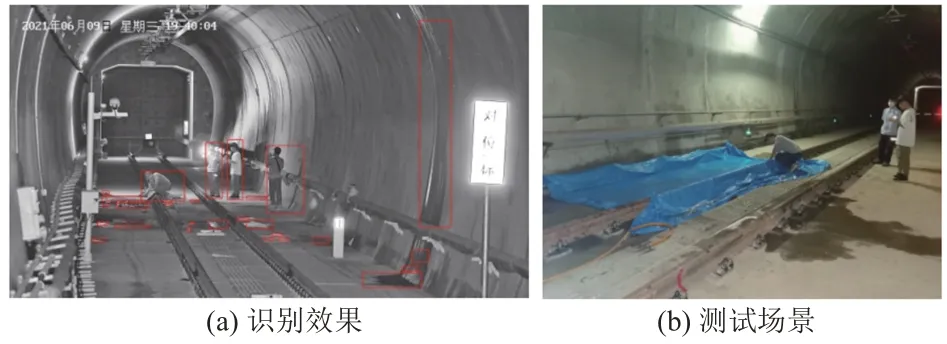
圖4 現場識別效果
系統測試相機按照15 fps幀率進行數據采集。該套系統全線部署,每個單目視野覆蓋25 m,測試距離按照10、20、30 m等距進行。受進入軌行區測試時間限制,三次(6月6日、6月9日和6月11日)進入軌行區現場,每個距離下分別按照20、30、20 min進行測試,所對應的理論測試幀數總數應為18 000、27 000、18 000幀。為方便統計,按每分鐘等間隔提取15幀圖像統計參數。不滿1 min的圖像幀數按1 min內等間隔時長提取并納入統計數據,積水識別測試結果見表1、圖5。
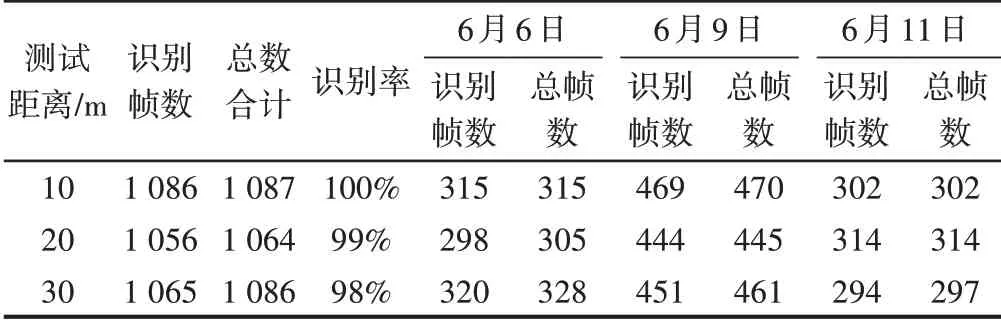
表1 積水識別測試結果
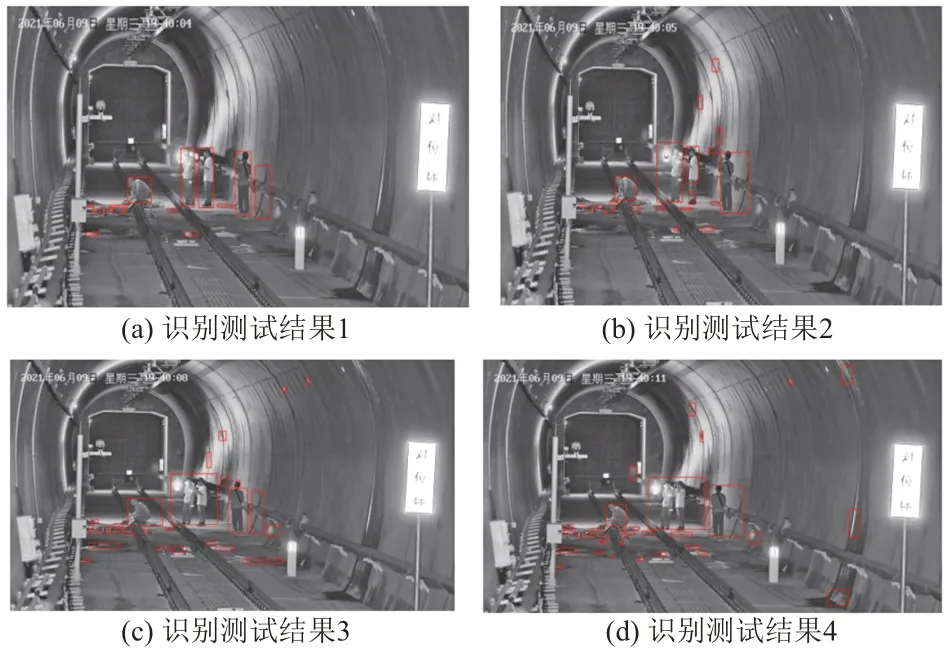
圖5 系統實測部分識別幀
由表1、圖5可知,無靶標圖像積水檢測系統有效識別了積水區域的變化情況,但該系統無法判斷積水的深淺,只可判斷積水的有無。因此,在隧道區間部署該系統的同時,可以根據區間坡度,在低洼處設置水位標識以輔助觀測積水的深淺。此外,該系統通過對運動下的人在高光譜區域內的特征識別,可在視野及補光系統覆蓋的區域對人物進行入侵監測。
3 結語
本文針對在軌道交通行業中因施工作業導致的滲漏水、強降雨等產生的軌行區積水,介紹了一種應用于軌行區積水的自主檢測的光譜視覺系統,可全方位對軌行區積水特征進行識別分析。以廈門軌道交通1號線試車線隧道區段為測試地點,對該系統進行了驗證。該系統在一定條件下對隧道軌行區積水具有良好的識別效果,不僅能有效監測軌行區積水狀態,還可報警以便人工進行遠程二次復核,降低因發現不及時導致積水過深帶來的安全隱患。同時,實現了對目標區段監控盲區的覆蓋。該系統具有較大的功能延展性,可對違規進入軌行區的人員進行實時監控,輔助保障列車行車安全,具有較高的實用價值。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52