面向鐵路工程三維信息重建的無人機航線規(guī)劃改進方法
2022-11-05 12:24:02王凱
鐵道建筑 2022年10期
王凱
中國鐵路設計集團有限公司,天津 300251
無人機航線規(guī)劃主要有基于幾何學的搜索算法和基于控制論的航跡算法。航線規(guī)劃主要是為了提高規(guī)劃效率,降低規(guī)劃時間,提高無人機飛行作業(yè)的安全性。目前相關研究主要集中在軍用領域,民用航空攝影測量的航線規(guī)劃主要以傳統(tǒng)的弓字形、井字形航帶規(guī)劃設計為主,面向鐵路應用場景的無人機航線規(guī)劃研究較少。
我國鐵路運營總里程已達到15萬km,高速鐵路運營里程已達到4萬km。隨著鐵路建設的高速增長和鐵路數(shù)字化建設、智能化運營轉換,需要高精度鐵路實景模型作為鐵路智慧化建設、運維基礎三維數(shù)據(jù)場景[1]。鐵路工程建設、既有線高精度實景模型重建所需的無人機數(shù)據(jù)采集一直存在瓶頸問題。在狹小帶狀區(qū)域獲取數(shù)據(jù)的角度較少,無人機在鐵路正上方和反復穿越既有線航飛作業(yè)存在巨大的安全隱患。按照傳統(tǒng)無人機三維實景重建航線規(guī)劃方法,需要采用弓字形、井字形飛行,無法避免以上問題[2]。普通三維實景無人機航飛數(shù)據(jù)獲取方法無法做到面向鐵路針對性的多角度定制采集,鐵路三維模型重建精度、效率低。
本文針對鐵路高精度實景重建數(shù)據(jù)采集現(xiàn)狀,提出一種面向鐵路工程三維信息重建的無人機航線規(guī)劃改進方法。相比傳統(tǒng)井字形、弓字形航線(圖1),改進方法采用單側回旋多角度飛行作業(yè)采集(圖2),運用優(yōu)視攝影測量原理,有效避免無人機在鐵路正上方和交叉穿越鐵路運營線作業(yè),提高數(shù)據(jù)采集的針對性、數(shù)據(jù)重建的效率和模型的精細化程度,實現(xiàn)鐵路運營天窗時間內(nèi)高效地開展無人機多角度數(shù)據(jù)采集,為鐵路智慧化建設和運營提供精確的實景三維場景。
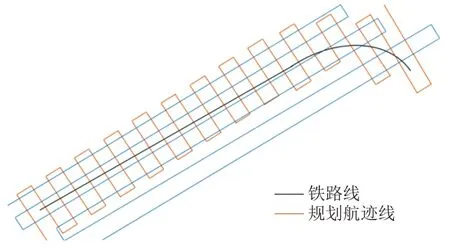
圖1 傳統(tǒng)井字形航線規(guī)劃
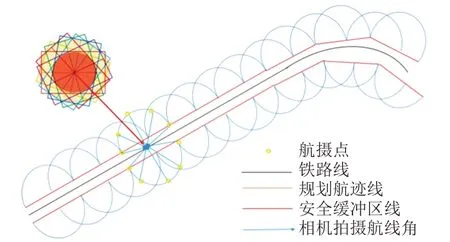
圖2 回旋多角度數(shù)據(jù)采集航線規(guī)劃
1 鐵路中線節(jié)點加密
鐵路數(shù)字中線一般只記錄線段折線節(jié)點坐標,對長距離的直線段中間區(qū)域無坐標記錄。為了按照一定距離均勻布設航點,需要進行鐵路中線節(jié)點加密。
利用既有鐵路中線資料進行鐵路中線節(jié)點坐標加密。利用相機參數(shù)(像元尺寸為p,畫幅尺寸為px×py,相機鏡頭焦距為f)和相對航高h進行物方覆蓋的地表區(qū)域尺寸計算[3]。所覆蓋的地表區(qū)域尺寸Lx、Ly與相對航高關系[4]為
對于回旋多角度的數(shù)據(jù)采集,其地面投影區(qū)域的形狀如圖3所示。其核心有效投影區(qū)域(高精度)為紅色區(qū)域,一般區(qū)域(普通精度)為黃色區(qū)域。核心區(qū)域形狀可以抽象為圓形,直徑長度為Lx。一般區(qū)域的形狀也近似為圓形,直徑長度為Ly。對于一條航帶,相鄰核心區(qū)域兩兩重疊,其重疊率r為重疊區(qū)域面積Soverlap與兩個圓形面積總和Scircular的比值[5]。對于圖4,L x為核心區(qū)直徑;D為兩個圓心距離的1∕2;L為對應弦長
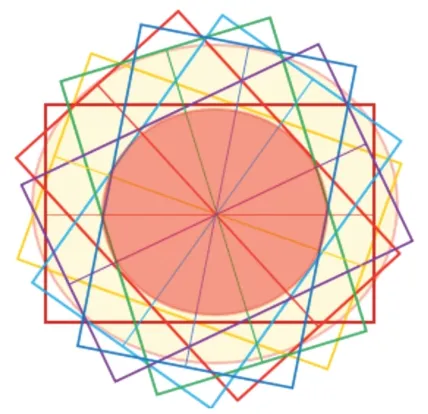
圖3 影像地面投影區(qū)域
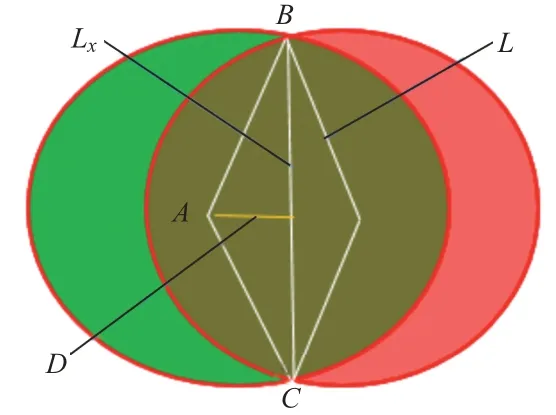
圖4 核心區(qū)域重疊率的計算
以A點為圓心、為弧長的對應圓心角α的計算式為

扇形A BC的面積SH,A BC計算式為

三角形AB C的面積ST,ABC計算式為

重疊區(qū)域面積Soverlap計算式為

重疊率r計算式為

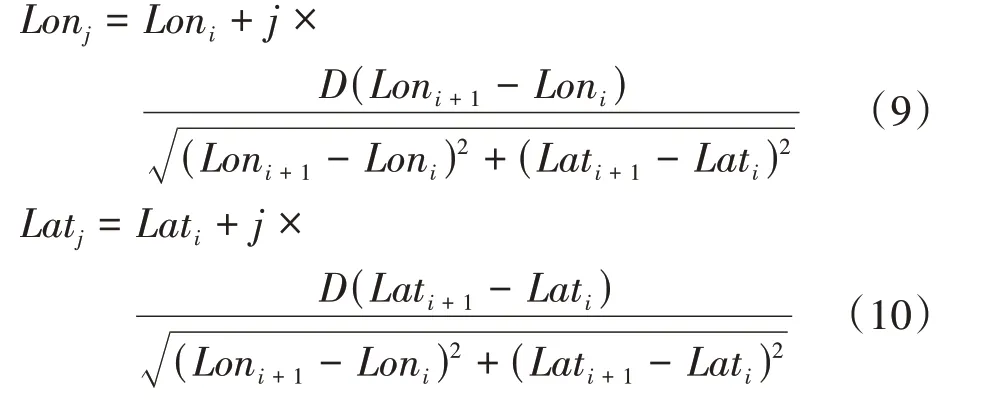
由式(3)—式(7)建立了r與D的對應關系,利用r與Lx可實現(xiàn)加密點間隔D的計算[6]。已知鐵路中線節(jié)點坐標為(Loni,Lati),i=1,2,…,m。對(L oni,Lati)與(Loni+1,L ati+1)之間的坐標進行內(nèi)插,內(nèi)插坐標為(L on j,Latj),j的取值為0~n[7-8]。n的計算式為

內(nèi)插坐標(Lonj,L atj)的計算式為
得到加密后的中心節(jié)點地理坐標數(shù)組(loni,l ati),i的取值為
2 外擴安全緩沖區(qū)的計算
以加密的鐵路中線節(jié)點為基準,計算安全緩沖區(qū)邊界。將加密后的坐標(l oni,lati)垂直于中線左右分別外擴距離Dbuffer,并計算外擴后的坐標(l onL,latL)、(lonR,l atR),效果見圖5。
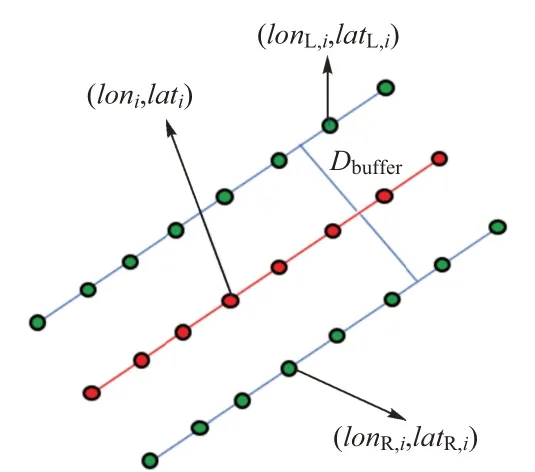
圖5 安全區(qū)邊界節(jié)點坐標計算
具體的實現(xiàn)方式如下:
①將加密后的中線節(jié)點地理坐標(l onL,i,latL,i)轉換成大地空間平面坐標(XR,i,YR,i),其轉換方法為通用方法[9]。
②利用(Xi,Yi)、(Xi+1,Yi+1)坐標計算兩個點坐標方位角θ[10],計算式為其中

對于左側外擴的區(qū)域,航向角向左旋轉90°得到旋轉后的坐標方位角θL[11],計算式為
當θ-90°≤-180°時

當-180°<θ-90°<180°時

③將(Xi,Yi)向左平移Dbuffer得到向左外擴后平面坐標(XL,i,YL,)i,其計算式見式(16)、式(17),同理得到右側的坐標(XR,i,YR,)i。

④將外擴節(jié)點平面坐標轉(XL,i,YL,i)、(XR,i,YR,i)轉換為外擴節(jié)點地理坐標(LonL,i,LatL,i)、(L onR,i,L atR,i)。
3 曝光點參數(shù)計算
3.1 曝光點坐標和相對航高計算
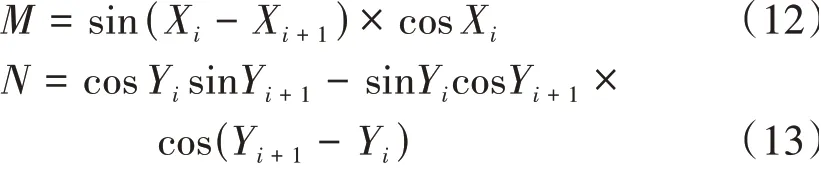
以安全區(qū)邊界節(jié)點地理坐標(L onLi,LatLi)、(LonRi,L atRi)為基準進行多角度曝光點位置計算,見圖6。
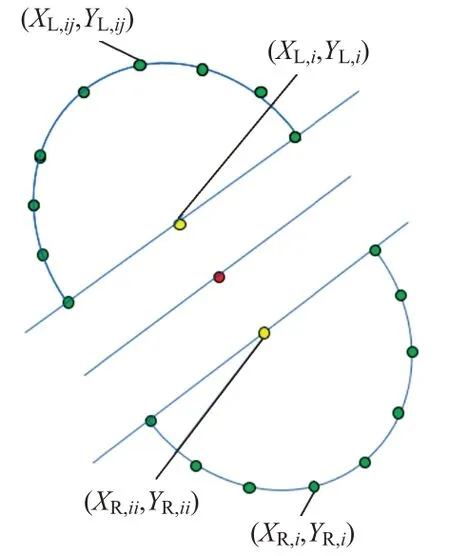
圖6 曝光點坐標計算
1)(LonL,i,LatL,i)、(LonR,i,LatR,i)地理坐標轉化為平面投影坐標(XL,i,YL,i)、(XL,i+1,YL,i+1)。(XL,i,YL,i)、(XL,i+1,YL,i+1)坐標是由(Xi,Yi)、(Xi+1,Yi+1)向左平行計算所得,因此二者的坐標方位角θL與(Xi,Yi)、(Xi+1,Yi+1)坐標方位角θ相等[12]。
2)對于左側外擴的區(qū)域,航向角θL逆時針依次旋轉20°、40°、60°、80°、100°、120°、140°、160°、180°,經(jīng)過多次試驗論證,旋轉角度間隔、數(shù)據(jù)量與模型精細化程度上存在最優(yōu)的關系,根據(jù)經(jīng)驗值得到角度為20°。旋轉后的坐標方位角θLi,i取值為1~9,即
當θ-20°i<-180°時

當-180°<θ-20°i<180°時

對于右側外擴的區(qū)域,航向角順時針向依次旋轉0°、20°、40°、60°、80°、100°、120°、140°、160°、180°。旋轉后的坐標方位角θRi,i的取值為1~9,即
當θ+20°i>180°時

當180°<θ+20°i≤180°時

利用平面坐標(LonL,i,LatL,i),按照(h-Dbuffer)為半徑計算曝光點的平面坐標(XL,ij,YL,ij),其中Dbuffer為緩沖區(qū)距離,j取值為1~9,計算式[13]為

3)將曝光點平面坐標(XL,i j,YL,ij)、(XR,ij,YR,ij)轉換為曝光點地理坐標(L onL,ij,L atL,i j)、(LonR,ij,L atR,ij)。
4)利用(LonL,ij,LatL,ij)、(L onR,ij,L atR,ij)提取基礎數(shù)字地形模型高程ZL,ij、ZR,ij,以第一個點的高程絕對值ZL11、ZR11為基準計算相對高程值HLij、HRij,計算式[14]為

曝光點航飛仿地相對高度值Sij計算式[15]為

3.2 曝光點云臺方位角、俯仰角計算
1)航向角計算
利用曝光點坐標(L onL,ij,L atL,ij)、(L onR,ij,LatR,ij)與線路中心加密節(jié)點坐標(loni,lati)進行無人機云臺方位角ψij(兩坐標的坐標方位角)計算,相關效果見圖7。
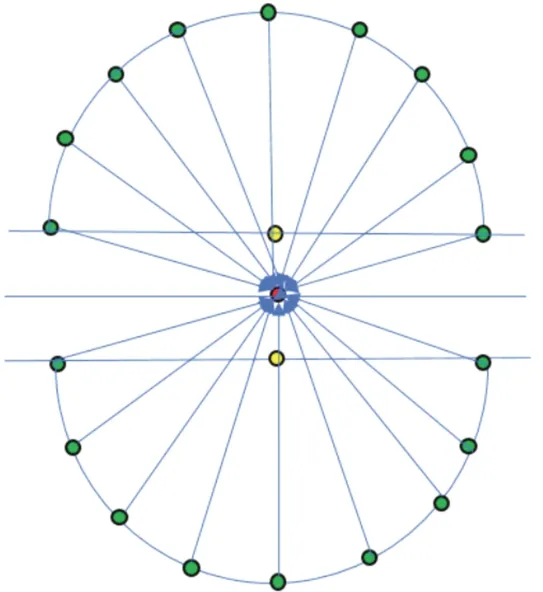
圖7 曝光點云臺方位角計算
ψij計算式為

其中

2)俯仰角計算
根據(jù)各個曝光點投影坐標(XL,ij,YL,i j)、(XR,ij,YR,ij)與對應鐵路既有線中線加密節(jié)點投影坐標(xi,yi)和設定的相對航高h進行云臺俯仰角ρij拍攝的計算[16]。

4 航線規(guī)劃軟件與實景三維重建試驗
4.1 航線規(guī)劃軟件
根據(jù)以上航線規(guī)劃算法進行航線規(guī)劃地面站軟件設計與開發(fā)。通過人機交互的方式圈劃鐵路中線或導入鐵路中線矢量文件[17-19],并設置相應的相機參數(shù)、相對航高、安全緩沖距離等進行曝光點位置、參數(shù)與航線參數(shù)的自動計算,生成可執(zhí)行的航線任務文件。任務文件可直接導入無人機平臺,無需編輯即可開展全自動作業(yè)。
4.2 無人機數(shù)據(jù)采集與三維重建試驗
選擇朝凌高速鐵路開展算法應用對比試驗。選擇含有隧道出口、橋梁、路塹邊坡的6 km路段作為試驗段,覆蓋鐵路主體工程(中線兩側各50 m范圍)。采用焦距56 mm,4 100萬單鏡頭相機。傳統(tǒng)井字形算法采用航向80%,旁向80%的重疊率,本算法同樣采用80%重疊率。對試驗數(shù)據(jù)獲取情況與三維重建效率進行統(tǒng)計分析,見表1。可知:本文算法所需獲取的數(shù)據(jù)量比傳統(tǒng)算法減少21%,觀測角度為傳統(tǒng)觀測的3.6倍,重建時間縮短21%。

表1 本文算法與傳統(tǒng)方法對比
通過影像空三加密、模型表面三角網(wǎng)構建、模型表面紋理貼圖等工作,隧道洞口、軌道等目標得到精細化的重建,具體效果見圖8。相比傳統(tǒng)井字形數(shù)據(jù)獲取模型的重建效果(圖9),模型的精細度程度得到明顯提升。
圖8 本文方法軌道重建效果

圖9 傳統(tǒng)井字形軌道重建效果
5 結論
1)使用無人機回旋多角度航線規(guī)劃方法能有效實現(xiàn)鐵路工程目標三維重建航飛作業(yè)任務規(guī)劃,與傳統(tǒng)單鏡頭井字五向航飛采集方式相比,有效減少了獲取數(shù)據(jù)的冗余度,提高了實景模型重建的效率。
2)采用建立安全緩沖區(qū)方式開展航飛作業(yè),避免了無人機作業(yè)過程中的線路交叉穿越,提高了數(shù)據(jù)采集的安全性。
3)使用回旋多角度方法進行數(shù)據(jù)采集,使得目標的觀測角度更多,減低了數(shù)據(jù)獲取的盲區(qū),減少了模型的拉花現(xiàn)象,提高了模型重建的精細化水平。
猜你喜歡
云南畫報(2021年12期)2021-03-08 00:50:54
鐵道通信信號(2018年7期)2018-08-29 01:17:04
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
通信電源技術(2016年4期)2016-04-04 02:58:04
工程建設與設計(2016年3期)2016-02-27 10:50:46
中國工程咨詢(2016年4期)2016-02-14 07:28:28