基于天棚阻尼的某特種車輛垂向平穩(wěn)性優(yōu)化
2022-10-31 07:55:14梁志慷黃志輝趙國(guó)棟楊鴻泰秦曉特
鐵道車輛 2022年5期
關(guān)鍵詞:控制策略
梁志慷,黃志輝,趙國(guó)棟,楊鴻泰,秦曉特
(1.西南交通大學(xué) 牽引動(dòng)力國(guó)家重點(diǎn)實(shí)驗(yàn)室,四川 成都 610031;2.太原中車時(shí)代軌道工程機(jī)械有限公司,山西 太原 030027)
鐵道車輛應(yīng)用被動(dòng)懸掛系統(tǒng)較多,此時(shí)減振器性能在運(yùn)行過(guò)程中固定不變[1],當(dāng)軌道線路條件、振動(dòng)狀況等發(fā)生變化時(shí),車輛振動(dòng)加劇、動(dòng)力學(xué)性能惡化。而半主動(dòng)或全主動(dòng)懸掛系統(tǒng)可利用控制策略實(shí)時(shí)調(diào)節(jié)阻尼系數(shù),針對(duì)復(fù)雜多變的工況進(jìn)行響應(yīng),改善車輛動(dòng)力學(xué)性能。半主動(dòng)控制比主動(dòng)控制需要能量少,在控制策略失效的情況下,半主動(dòng)控制可作為被動(dòng)控制繼續(xù)工作,可靠性較高[2-3]。因此,將半主動(dòng)控制應(yīng)用于車輛懸掛系統(tǒng)是改善鐵道車輛運(yùn)行品質(zhì)的發(fā)展趨勢(shì)之一[4]。
目前針對(duì)半主動(dòng)懸掛系統(tǒng)對(duì)車輛二系橫向減振效果的研究較多[5-8],針對(duì)垂向減振器的半主動(dòng)控制研究較少。現(xiàn)有某特種車輛在優(yōu)化其懸掛參數(shù)后車體垂向平穩(wěn)性仍不理想,因此本文擬采用一系懸掛半主動(dòng)控制改善車體垂向平穩(wěn)性,建立車輛動(dòng)力學(xué)模型進(jìn)行仿真分析,并對(duì)比分析半主動(dòng)控制與被動(dòng)控制對(duì)車輛運(yùn)行穩(wěn)定性和曲線通過(guò)性能的影響。
1 車輛模型
利用SIMPACK多體動(dòng)力學(xué)軟件建立車輛動(dòng)力學(xué)模型,如圖1所示。模型包括1個(gè)車體、2個(gè)構(gòu)架、2個(gè)齒輪箱、4個(gè)輪對(duì)、8個(gè)軸箱,共計(jì)17個(gè)剛體。軸箱定位采用雙拉桿定位方式,兩側(cè)各設(shè)置1組圓鋼彈簧。車體、構(gòu)架和輪對(duì)考慮伸縮、橫移、沉浮、側(cè)滾、點(diǎn)頭、搖頭6個(gè)自由度,齒輪箱和軸箱只考慮點(diǎn)頭自由度,整車共計(jì)52個(gè)自由度,其拓?fù)鋱D如圖2所示。

圖1 SIMPACK車輛動(dòng)力學(xué)模型
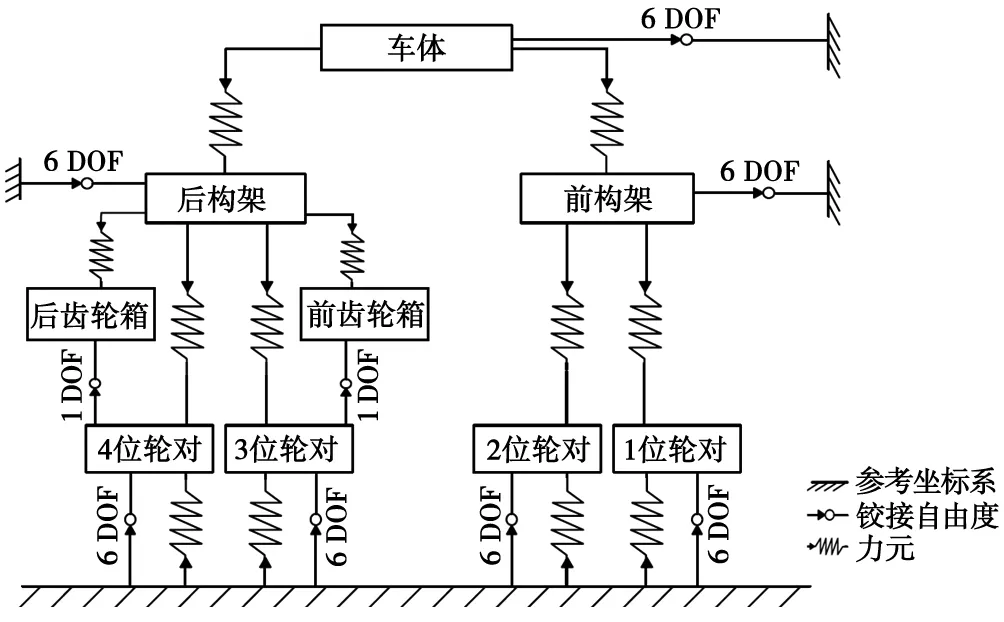
圖2 車輛拓?fù)鋱D
2 仿真模型
2.1 天棚阻尼控制原理
車輛對(duì)應(yīng)的兩自由度1/4半主動(dòng)懸掛系統(tǒng)模型如圖3所示,所采用的天棚阻尼控制策略是由美國(guó)學(xué)者D.Karnopp教授提出的一種半主動(dòng)隔振方案,應(yīng)用廣泛,可靠性高[9],通過(guò)改變減振器的阻尼值改善列車平穩(wěn)性。按照其調(diào)節(jié)特性,控制策略分為:開(kāi)關(guān)型天棚阻尼控制策略和連續(xù)型天棚阻尼控制策略。

k1.二系懸掛剛度;k2.一系懸掛剛度;x1.構(gòu)架位移;x2.軸箱位移。
開(kāi)關(guān)型天棚阻尼控制的阻尼系數(shù)調(diào)節(jié)規(guī)律和連續(xù)型天棚阻尼控制的阻尼系數(shù)調(diào)節(jié)規(guī)律分別為式(1)和式(2)。
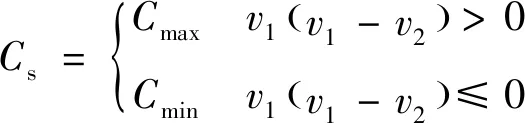
(1)
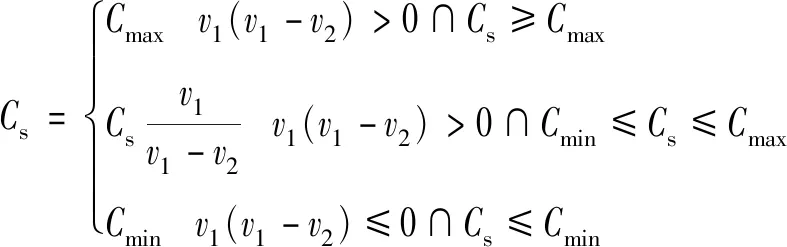
(2)
式中:v1——構(gòu)架垂向絕對(duì)速度,m/s;
v2——軸箱垂向絕對(duì)速度,m/s;
Cs——減振器阻尼系數(shù),kN·s/m;
Cmax——最大天棚阻尼系數(shù),kN·s/m;
Cmin——最小天棚阻尼系數(shù),kN·s/m。
可連續(xù)調(diào)節(jié)阻尼系數(shù)的減振器設(shè)計(jì)制造難度大,工程上通常采用易實(shí)現(xiàn)的開(kāi)關(guān)型天棚阻尼控制,其控制原理為:垂直方向,當(dāng)轉(zhuǎn)向架構(gòu)架相對(duì)于軸箱的速度和轉(zhuǎn)向架構(gòu)架的絕對(duì)速度方向相同時(shí),減振器提供的阻尼力與構(gòu)架運(yùn)行方向相反,此時(shí)天棚阻尼系數(shù)取最大值以抑制構(gòu)架垂向振動(dòng);當(dāng)轉(zhuǎn)向架構(gòu)架相對(duì)于軸箱的速度和構(gòu)架的絕對(duì)速度方向相反時(shí),減振器提供的阻尼力與構(gòu)架運(yùn)行方向相同,此時(shí)減振器提供的阻尼力會(huì)導(dǎo)致構(gòu)架振動(dòng)加劇,故天棚阻尼系數(shù)應(yīng)取最小值以減小提供給構(gòu)架的阻尼力,盡可能避免構(gòu)架振動(dòng)的加劇。
2.2 Simulink仿真模型
選用開(kāi)關(guān)型天棚阻尼控制策略,根據(jù)式(1)在MATLAB/Simulink中搭建車輛一系垂向減振器的半主動(dòng)控制模型,如圖4所示。其中,輸入模塊1、2分別對(duì)應(yīng)一系垂向減振器兩端絕對(duì)速度,常量模塊1、2分別對(duì)應(yīng)最大、最小天棚阻尼系數(shù),輸出模塊對(duì)應(yīng)一系垂向減振器所輸出的阻尼力。
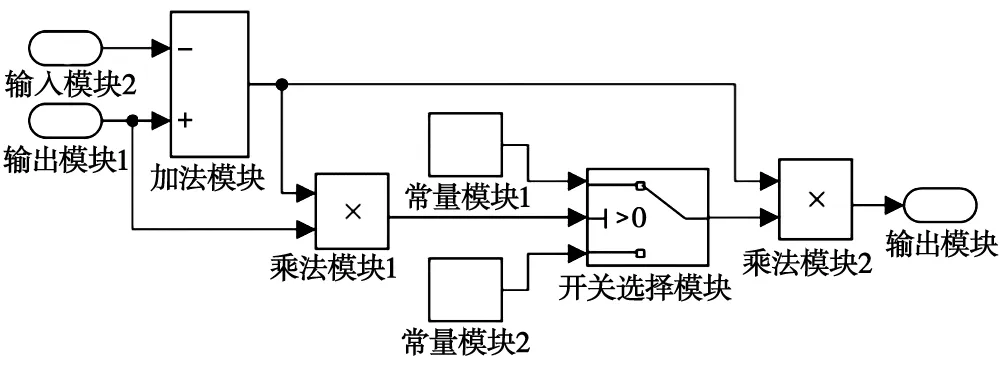
圖4 半主動(dòng)控制Simulink模型
2.3 半主動(dòng)控制仿真模型
仿真分析前需在SIMAPCK中定義一系垂向減振器的阻尼力和兩端絕對(duì)速度,并分別作為輸入和輸出變量,然后在MATLAB中調(diào)用Simulink自帶的SIMAT接口與車輛動(dòng)力學(xué)模型實(shí)現(xiàn)數(shù)據(jù)交互,最終建立仿真分析模型,如圖5所示。圖5中,左側(cè)接口1~8與一系垂向減振器阻尼力相連,接收輸入變量;右側(cè)接口1~16中,奇數(shù)號(hào)接口輸出減振器與軸箱相連端的絕對(duì)速度。
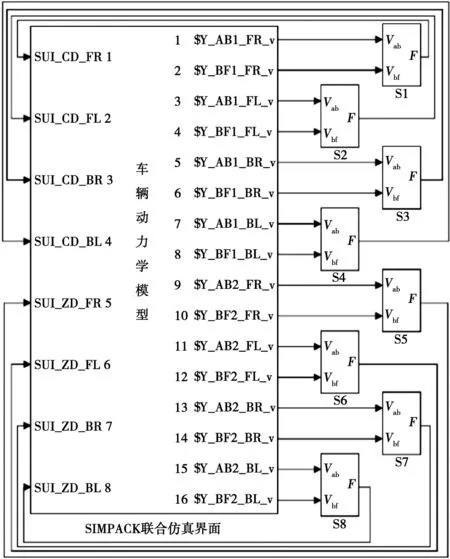
S1~S8.一系垂向減振器半主動(dòng)控制Simulink模型;Vab.軸箱端減振器絕對(duì)速度;Vbf.構(gòu)架端減振器絕對(duì)速度;F.理想的阻尼力。
3 天棚阻尼系數(shù)的選取
采用開(kāi)關(guān)型天棚阻尼控制策略需確定最大天棚阻尼系數(shù)Cmax與最小天棚阻尼系數(shù)Cmin。在實(shí)際工作中減振器作用不可能完全消失,故Cmin不為0,根據(jù)減振器實(shí)際阻尼特性數(shù)據(jù),取Cmin=3 kN·s/m[10]。
在正常懸掛參數(shù)范圍內(nèi),一般取數(shù)值小的懸掛剛度有利于改善平穩(wěn)性,但阻尼有最優(yōu)范圍,且其數(shù)值與列車速度、軌道條件、剛度等有關(guān)[11]。對(duì)于Cmax的取值,可選取車輛以120 km/h的速度直線運(yùn)行工況,在Cmax在10~150 kN·s/m范圍內(nèi)對(duì)車體垂向平穩(wěn)性指標(biāo)進(jìn)行仿真分析,依據(jù)車體垂向平穩(wěn)性指標(biāo)確定Cmax的值。
圖6給出了車體垂向平穩(wěn)性指標(biāo)隨Cmax的變化趨勢(shì)。從圖6可以看出,Cmax在10~100 kN·s/m范圍內(nèi),車體垂向平穩(wěn)性指標(biāo)隨著Cmax的增大逐漸改善;Cmax在100~140 kN·s/m范圍內(nèi),車體垂向平穩(wěn)性指標(biāo)變化趨勢(shì)較緩;當(dāng)Cmax=150 kN·s/m時(shí),車體垂向平穩(wěn)性迅速惡化,這是因?yàn)檐壍兰?lì)傳遞給一系懸掛的高頻振動(dòng)成分較多,阻尼的增大使高頻振動(dòng)傳遞率增大,導(dǎo)致車體平穩(wěn)性惡化[12]。圖7給出了Cmax=140 kN·s/m和Cmax=150 kN·s/m時(shí)車體垂向振動(dòng)加速度功率譜密度曲線。從圖7可以看出,當(dāng)Cmax=150 kN·s/m時(shí),90~100 Hz高頻區(qū)振動(dòng)明顯增多且遠(yuǎn)超過(guò)低頻振動(dòng),從而導(dǎo)致車體垂向平穩(wěn)性迅速惡化,這與理論判斷結(jié)果相符。所以,一系垂向阻尼不宜選擇太大,Cmax的選擇范圍在100~140 kN·s/m為宜,基于工程化考慮,Cmax取值100 kN·s/m。
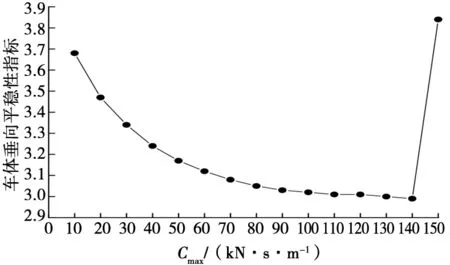
圖6 車體垂向平穩(wěn)性指標(biāo)隨Cmax的變化曲線

圖7 車體垂向振動(dòng)加速度功率譜密度對(duì)比圖
4 動(dòng)力學(xué)性能對(duì)比分析
4.1 運(yùn)行平穩(wěn)性
在直線運(yùn)行工況下,對(duì)車輛以不同速度通過(guò)美國(guó)五級(jí)譜激擾的軌道時(shí)半主動(dòng)控制與被動(dòng)控制對(duì)車體橫向和垂向平穩(wěn)性的影響進(jìn)行對(duì)比分析。圖8為70~130 km/h速度范圍內(nèi)半主動(dòng)控制與被動(dòng)控制車體橫向和垂向平穩(wěn)性指標(biāo)隨列車運(yùn)行速度變化情況。
由圖8(a)可知,隨著車輛運(yùn)行速度提高,車體橫向平穩(wěn)性逐漸惡化,但列車運(yùn)行速度超過(guò)110 km/h后,車體的橫向平穩(wěn)性有所改善;在70~90 km/h速度范圍內(nèi),半主動(dòng)控制與被動(dòng)控制下的車體橫向平穩(wěn)性相近,當(dāng)速度超過(guò)90 km/h后,半主動(dòng)控制對(duì)車體的橫向平穩(wěn)性改善越來(lái)越明顯,速度為110 km/h時(shí),改善效果最好,車體橫向平穩(wěn)性改善幅度為5%。由圖8(b)可知,隨著列車運(yùn)行速度提高,車體垂向平穩(wěn)性一直惡化,同時(shí)半主動(dòng)控制對(duì)車體垂向平穩(wěn)性的改善效果明顯,在速度110 km/h時(shí)改善效果最好,車體垂向平穩(wěn)性改善幅度為12%,根據(jù)GB/T 17426—1998《鐵道特種車輛和軌行機(jī)械動(dòng)力學(xué)性能評(píng)定及試驗(yàn)方法》規(guī)定,車輛平穩(wěn)性指標(biāo)低于3時(shí)的平穩(wěn)性等級(jí)為優(yōu)級(jí)[13],可見(jiàn),90 km/h運(yùn)行速度內(nèi)被動(dòng)控制時(shí)車體垂向平穩(wěn)性為優(yōu)級(jí),120 km/h運(yùn)行速度(設(shè)計(jì)時(shí)速)內(nèi)半主動(dòng)控制時(shí)車體垂向平穩(wěn)性為優(yōu)級(jí)。

圖8 半主動(dòng)控制與被動(dòng)控制車體橫向和垂向平穩(wěn)性指標(biāo)變化曲線
可見(jiàn),隨著列車運(yùn)行速度的提高,半主動(dòng)控制對(duì)車體平穩(wěn)性的改善越來(lái)越明顯,車體橫向和垂向平穩(wěn)性指標(biāo)均在運(yùn)行速度為110 km/h時(shí)改善效果最好,由于半主動(dòng)控制策略主要作用于垂向,垂向平穩(wěn)性改善幅度較大。
4.2 加速度功率譜密度
由于開(kāi)關(guān)型天棚阻尼半主動(dòng)控制對(duì)該車輛的垂向平穩(wěn)性改善幅度較大,且平穩(wěn)性指標(biāo)是以振動(dòng)加速度計(jì)算得到,故可利用加速度功率譜密度判斷半主動(dòng)控制策略優(yōu)化的車體垂向振動(dòng)具體頻率范圍。
圖 9為被動(dòng)控制和半主動(dòng)控制車體垂向振動(dòng)加速度功率譜密度曲線。由圖9可知,半主動(dòng)控制可有效抑制車體中低頻范圍(0~5 Hz)內(nèi)的振動(dòng),但在高頻范圍(大于5 Hz)內(nèi),半主動(dòng)控制會(huì)導(dǎo)致車體高頻振動(dòng)成分有所增加,這是由于控制策略的天棚阻尼系數(shù)在最大值與最小值之間頻繁切換導(dǎo)致的。可以看出,開(kāi)關(guān)型天棚阻尼半主動(dòng)控制針對(duì)中低頻振動(dòng)有較好的減振效果,若要實(shí)現(xiàn)整個(gè)頻率范圍內(nèi)振動(dòng)的降低,仍需進(jìn)一步研究。
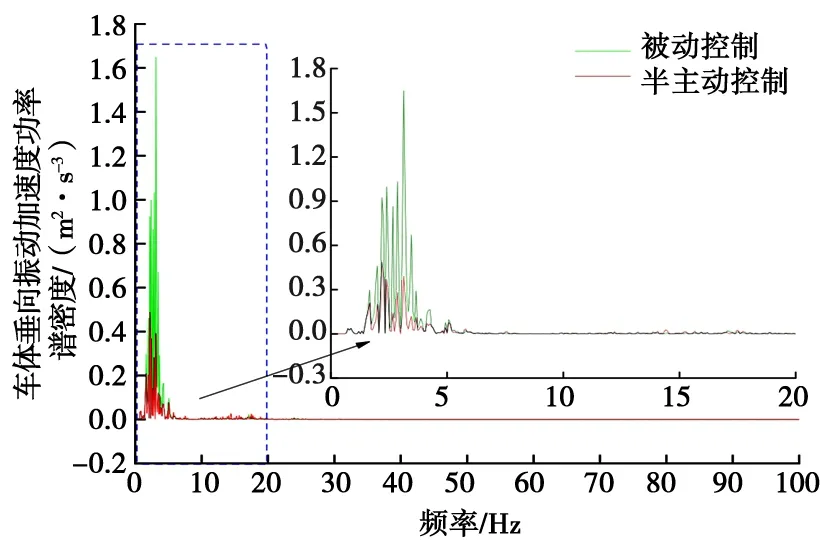
圖9 車體垂向振動(dòng)加速度功率譜密度曲線
4.3 運(yùn)行穩(wěn)定性
以非線性臨界速度作為車輛運(yùn)行穩(wěn)定性的評(píng)判標(biāo)準(zhǔn),分別計(jì)算被動(dòng)控制和半主動(dòng)控制作用下車輛的非線性臨界速度。計(jì)算結(jié)果顯示:被動(dòng)控制下車輛的非線性臨界速度為452 km/h,半主動(dòng)控制下車輛的非線性臨界速度為395 km/h,降低了13%。被動(dòng)控制和半主動(dòng)控制作用下車輛的輪對(duì)橫移量時(shí)程曲線如圖10所示。

圖10 被動(dòng)控制和半主動(dòng)控制下輪對(duì)橫移量時(shí)程曲線
4.4 曲線通過(guò)性能
車輛的曲線通過(guò)性能分別按脫軌系數(shù)、輪重減載率、橫向力允許限度等指標(biāo)評(píng)定[13]。GB/T 17426—1998規(guī)定,脫軌系數(shù)第一限值為1.0,輪重減載率第一限值為0.6,車輛軸重為17.5 t,根據(jù)這些參數(shù)計(jì)算得到輪軸橫向力限值為87 kN。
按照曲線半徑為800 m、軌道激勵(lì)為美國(guó)五級(jí)軌道譜計(jì)算,被動(dòng)控制和半主動(dòng)控制作用下,車輛在70~130 km/h速度范圍內(nèi)的曲線通過(guò)性能指標(biāo)的仿真結(jié)果如圖11所示。

圖11 被動(dòng)控制和半主動(dòng)控制作用下曲線通過(guò)性能指標(biāo)仿真結(jié)果
從圖11(a)和圖11(b)可以看出,在70~110 km/h速度范圍內(nèi),半主動(dòng)控制對(duì)車輛的脫軌系數(shù)與輪軸橫向力的作用效果與被動(dòng)控制相近;當(dāng)速度超過(guò)110 km/h后,半主動(dòng)控制對(duì)脫軌系數(shù)與輪軸橫向力有所改善。由圖11(c)可知,隨車輛運(yùn)行速度提高輪重減載率先減小后增大,半主動(dòng)控制會(huì)導(dǎo)致車輛輪重減載率惡化,車速130 km/h時(shí)輪重減載率0.57,未超出安全限值0.6。
5 結(jié)論
(1) 隨著開(kāi)關(guān)型天棚控制Cmax增大,車體垂向平穩(wěn)性先改善后惡化,基于工程化考慮Cmax選取100 kN·s/m。
(2) 開(kāi)關(guān)型天棚垂向半主動(dòng)控制策略可提升車輛垂向平穩(wěn)性12%,同時(shí)對(duì)車輛橫向平穩(wěn)性、脫軌系數(shù)和輪軸橫向力影響較小。
(3) 采用開(kāi)關(guān)型天棚控制,車輛非線性臨界速度有所降低,雖輪重減載率增加,但未超出安全限值,仍滿足運(yùn)行安全要求。
(4) 開(kāi)關(guān)型天棚阻尼控制策略可在車輛上實(shí)現(xiàn)工程化應(yīng)用。
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測(cè)與儀表(2014年24期)2014-04-09 11:35:36
