基于水平集和浸入邊界方法的鰻鱺科魚類游動模擬研究
2022-10-29 03:39:32汪陽生周后村
船舶力學(xué) 2022年10期
崔 祚,汪陽生,周后村
(1.貴州理工學(xué)院航空航天工程學(xué)院,貴陽 550003;2.中國空氣動力研究與發(fā)展中心,四川 綿陽 621000)
0 引 言
經(jīng)過億萬年自然進(jìn)化,魚類為捕獲食餌、逃避敵害和繁殖后代等生存需要,獲得了優(yōu)異的水下運(yùn)動能力,既可以在持久巡游下保持高效率,也可在逃逸狀態(tài)下爆發(fā)極高的游動加速度,還可在復(fù)雜狹小環(huán)境中實(shí)現(xiàn)高機(jī)動性游動[1]。目前,魚類仿生學(xué)研究已經(jīng)取得了諸多進(jìn)展,并在生物流體力學(xué)以及仿生水下航行器等方面形成特色[2]。雖然研究人員設(shè)計了多種仿生水下航行器,但航行器的推進(jìn)性能遠(yuǎn)遜色于魚類的游動性能,其重要原因在于仿生學(xué)者并未完全揭示魚類高效快速游動機(jī)理,特別是柔性魚體與流體之間的相互作用過程[3]。
目前,計算流體力學(xué)(Computational Fluid Dynamics,CFD)被廣泛應(yīng)用到魚類游動的數(shù)值模擬中。與實(shí)驗分析相比,數(shù)值模擬方法能夠克服實(shí)驗操作困難和可重復(fù)性差等缺點(diǎn)。同時,魚游數(shù)值模擬結(jié)果能夠提供魚體周圍流場的壓力分布、速度分布以及尾跡渦量信息,為定量研究魚類游動性能和游動機(jī)理提供了條件。魚類游動的數(shù)值模擬研究屬于典型流固耦合問題,基于數(shù)值方法求解Navier-Stokes 方程組,根據(jù)魚體幾何形狀和運(yùn)動模型來設(shè)定邊界條件,計算出流場參數(shù)在連續(xù)區(qū)域上的離散分布,從而獲得魚類游動過程中流場隨時間變化的細(xì)節(jié)信息,有利于揭示魚類游動機(jī)理。例如,Liu等[4]在粘性非定常流條件下,分析了鰻鱺運(yùn)動模式的游動性能和尾跡流場結(jié)構(gòu);Carling 和Williams[5]分析了二維鰻魚自主游動中流體粘性對推進(jìn)性能的影響;Borazjani 和Sotiropoulos[6-7]研究了鰻鱺模式在粘性流體、過渡區(qū)流體和無粘流等情況下的游動性能,并與鲹科模式魚類對比,探討了魚體波參數(shù)對魚類游動速度、游動效率以及流場特征等的影響;Kern 等[8]分析了鰻鱺模式魚類自主游動過程中推進(jìn)效率和尾渦控制等流場信息,并提出了優(yōu)化推進(jìn)性能的設(shè)計方法;Gazzola 等[9]將流固耦合算法與增強(qiáng)學(xué)習(xí)等優(yōu)化算法相結(jié)合,實(shí)現(xiàn)了以提高游動效率為目標(biāo)的魚體運(yùn)動學(xué)和形態(tài)參數(shù)優(yōu)化。
在自然界,魚類的游動發(fā)生于非定常慣性流體環(huán)境中,數(shù)值模擬研究存在魚體外形復(fù)雜以及邊界運(yùn)動等難點(diǎn)。目前,新的網(wǎng)格生成方法和流固耦合數(shù)值算法為魚游數(shù)值模擬的計算效率和計算精度提供了實(shí)現(xiàn)途徑。對于復(fù)雜的幾何邊界,貼體網(wǎng)格的生成過程復(fù)雜、速度慢。對于動邊界問題,貼體網(wǎng)格需借助網(wǎng)格變形和動網(wǎng)格技術(shù),計算量大。鑒于此,本文采用level-set(LS)函數(shù)描述復(fù)雜的魚體界面,利用浸入邊界法(IB)模擬魚體與流體之間的相互作用力,即采用IB-LS 數(shù)值方法來模擬魚類游動[10]。該方法通過在控制方程中加入體積力源項來模擬邊界對流場的作用,然后在固定直角網(wǎng)格上進(jìn)行離散求解。該方法前期已被應(yīng)用到復(fù)雜動邊界流動的數(shù)值模擬中,具有網(wǎng)格生成簡單且不需要考慮邊界形狀的優(yōu)點(diǎn)。與前期工作[10]相比,本文以鰻鱺科魚類為研究對象,重點(diǎn)分析魚類游動性能與魚體波動曲線參數(shù)以及流體環(huán)境等因素的復(fù)雜關(guān)系,其中魚體波動曲線可通過擺動幅值、擺動頻率以及波動曲線波數(shù)等參數(shù)進(jìn)行評價。
1 數(shù)值方法
1.1 N-S控制方程
對無窮遠(yuǎn)處的來流速度U∞和特征長度L進(jìn)行無量綱化,魚類游動不可壓流體的Navier-Stokes 控制方程為
式中:xi(i= 1,2,3 )為以L作無量綱化的三個坐標(biāo)方向x、y和z;ui為三個坐標(biāo)方向的速度u、v和w;t為以L/U∞作無量綱化的時間;p為以ρU2∞作無量綱化的壓力,ρ為流體密度;Re為流體雷諾數(shù),Re=U∞L/ν;fi為魚體與流體的相互作用力。
對于低雷諾數(shù)流體,利用直接求解方法(DNS)進(jìn)行魚游的數(shù)值模擬。對于高雷諾數(shù)流體,采用大渦模擬方法(LES)進(jìn)行計算,流動的非定常性主要取決于大尺度漩渦的運(yùn)動,小尺度的運(yùn)動被認(rèn)為是各向同性。在數(shù)學(xué)上對N-S方程進(jìn)行某種過濾,只計算大尺度的湍流,將小于過濾尺度的湍流用SGS(Samgorinsky eddy viscosity)模型進(jìn)行分析[11]。相對于DNS 方法,LES 計算量較小,適合模擬高雷諾數(shù)流體環(huán)境中魚類復(fù)雜游動。采用LES方法的N-S控制方程為
由于采用浸入邊界法來模擬魚游,計算網(wǎng)格不需要考慮魚體的幾何形狀,所以將N-S方程直接在直角網(wǎng)格上進(jìn)行離散。本文采用正交網(wǎng)格進(jìn)行空間離散,各變量均分布在交錯網(wǎng)格上,速度分量定義在面心上,壓力和Level-set 函數(shù)值等均定義在體積單元中心上。空間離散方法主要包括二階精度的中心差分格式和迎風(fēng)非振蕩ENO(essentially non-oscillatory)格式。在魚體模擬中,在魚體界面附近使用ENO 格式,計算穩(wěn)定性較好,但耗散較大;在遠(yuǎn)離魚體界面的位置使用中心差分格式,數(shù)值耗散小。時間推進(jìn)采用二階精度Runge-Kutta 格式(RK2),由Fractional step 方法和Projection 方法來求解不可壓流體的N-S 方程,壓力泊松方程通過調(diào)用PETS 庫進(jìn)行求解。本文所使用的N-S 求解器是在Linux 系統(tǒng)下使用Fortran 語言進(jìn)行編寫,采用MPI 命令實(shí)現(xiàn)程序并行運(yùn)算,具體詳見文獻(xiàn)[10]。本文計算所需的硬件設(shè)備為國家超級計算長沙中心“天河”計算機(jī),二維和三維的魚游算例分別采用64 個和256 個CPU進(jìn)行并行計算。
1.2 基于Level-set方法的魚體界面描述
參考文獻(xiàn)[8],把鰻鱺科魚體截面簡化為橢圓形,其長軸半徑ξw(x)和短軸半徑ξh(x)分別為
式中,L為魚體長度,二維魚體幾何尺寸由函數(shù)ξw( )x描述。在浸入邊界法中,浸入物體的邊界形狀和位置通常由一套隨體運(yùn)動的拉格朗日網(wǎng)格來描述,拉格朗日點(diǎn)的坐標(biāo)是弧長和時間的函數(shù)。但對于魚體的復(fù)雜邊界,很難直接在邊界上劃分拉格朗日網(wǎng)格,通常需要借助網(wǎng)格劃分軟件進(jìn)行網(wǎng)格劃分,該方法計算量大,網(wǎng)格劃分也較為復(fù)雜。
本文采用Level-set 方法來確定魚體復(fù)雜界面,該方法也被用于描述多相流的界面[12]。設(shè)Levelset函數(shù)為φ(x,t),魚體邊界上的函數(shù)值φ(x,t)= 0,在魚體內(nèi)部(固體域內(nèi))任意點(diǎn)的函數(shù)值為負(fù)數(shù),在流體域中函數(shù)值為正數(shù)。由于Level-set 函數(shù)φ(x,t)為距離函數(shù),所以在計算區(qū)域內(nèi)可通過標(biāo)記魚體邊界附近網(wǎng)格點(diǎn)到邊界距離的正負(fù)值來判斷邊界位置,如判斷二維計算域第(i,j)個網(wǎng)格點(diǎn)是否為固體點(diǎn)(或流體點(diǎn)),可根據(jù)其距離函數(shù)的負(fù)值(或正值)進(jìn)行判斷。當(dāng)網(wǎng)格點(diǎn)(i,j)在流體域內(nèi)且任意相鄰網(wǎng)格點(diǎn)在固體域內(nèi),則說明該點(diǎn)為最靠近邊界的點(diǎn),即浸入邊界法中的加力點(diǎn)。
對于鰻鱺科魚類復(fù)雜的幾何邊界,本文采用多段函數(shù)來描述魚體的Level-set函數(shù),以二維魚體外形為例,定義多項式函數(shù),如式(7)所示,將計算域分為三部分,式中y0為某時刻魚體的擺動位置。
經(jīng)過20 次重復(fù)初始化的迭代,由Level-set 函數(shù)描述的鰻鱺科魚體模型如圖1(b)所示,對應(yīng)的等值線函數(shù)間距相等。該結(jié)果表明可通過重復(fù)初始化方法來修正魚體界面的Level-set 函數(shù),以滿足浸入邊界法對魚體界面描述的要求。
1.3 基于直接力法的浸入邊界法
在浸入邊界法中,固體邊界對流體的作用由體積力場代替,避免了在固體邊界上直接施加邊界條件,這就使得浸入邊界法可以在直角網(wǎng)格上求解流場,而不需要考慮物體邊界形狀及位置。研究者最初將剛性邊界看作具有很大彈性系數(shù)的彈性邊界,當(dāng)彈性系數(shù)取值較大時,求解力和流場的方程是大剛度系統(tǒng),需要很小的時間步長實(shí)現(xiàn)系統(tǒng)穩(wěn)定求解;彈性系數(shù)取值較小時會導(dǎo)致非物理的彈性作用。這種通過人為指定彈性系數(shù)來確定體積力的方法不能適應(yīng)流場變化,具有局限性[14]。后續(xù)Fadlun等[15]根據(jù)右端力源項的大小,提出了一種滿足邊界條件直接確定體積力的方法,即直接力法。在直接力法中,體積力的大小由邊界條件決定,并不依賴于具體的流動形式。本文采用基于直接力法的浸入邊界法來計算體積力,添加了體積力f后的動量方程為
動量方程的時間離散形式為
其中,RHS(右端項)包含對流項、粘性項以及壓力項,即?·(uu)- ?p+v?2u。計算體積力fn+1需要在固體邊界上滿足速度邊界條件,即un+1=Vn+1,即
在式(11)中,邊界上的體積力是通過在加力點(diǎn)上施加速度邊界條件來實(shí)現(xiàn)加力的過程。在計算體積力的過程中,加力點(diǎn)的位置通常不與邊界位置重合,所以根據(jù)周圍固體速度和流體速度共同插值得到加力點(diǎn)速度。本文利用Level-set函數(shù)φ( )x,t提供魚體界面附近直角網(wǎng)格點(diǎn)和邊界之間的相對位置信息,并利用φ( )x,t計算界面外法向矢量以及邊界附近直角網(wǎng)格點(diǎn)到壁面的距離。其中,魚體界面任意位置的外法向矢量可表示為= ( ?φ/| ?φ|)|φ=0,曲率半徑為?·。
如圖2所示,以二維網(wǎng)格為例說明Level-set方法與浸入邊界法相結(jié)合的過程。首先,通過Level-set 函數(shù)找到加力點(diǎn)0,利用Level-set 函數(shù)的外法向矢量尋找邊界上的固體點(diǎn)1,該點(diǎn)1 與點(diǎn)0 之間的連線垂直于邊界。設(shè)加力點(diǎn)0的坐標(biāo)為(x0,y0),則固體點(diǎn)1的坐標(biāo)為
式中,nx和ny分別為法向矢量沿x方向和y方向的分量,φ0為加力點(diǎn)0 的Level-set 函數(shù)值。然后,尋找加力點(diǎn)0 周邊相鄰的流體點(diǎn)2 和流體點(diǎn)3,其坐標(biāo)分別為(x2,y2)和(x3,y3),則
在接近魚體邊界時,速度場在壁面附近近似滿足線性分布,所以近壁流場可通過多項式插值來確定速度分布。本文采用多項式插值的方法來確定加力點(diǎn)速度,即加力點(diǎn)0 的速度由固體點(diǎn)速度1、流體點(diǎn)2和流體點(diǎn)3速度線性插值得到。設(shè)插值到加力點(diǎn)0上的速度為u0i(i= 1,2,3 ),則
式中,b1、b2和b3分別為二次線性插值系數(shù),可由固體點(diǎn)速度和流體點(diǎn)速度插值得到:
通過求解系數(shù)矩陣A,得到加力點(diǎn)0 上的速度信息(u01,u02,u03),即加力點(diǎn)0 的速度(u,v,w),然后根據(jù)式(11)求解對應(yīng)的體積力。此外,由第n步時間推進(jìn)到第n+1步時,還可以實(shí)時監(jiān)測魚體的運(yùn)動速度和位移實(shí)現(xiàn)重復(fù)迭代,進(jìn)一步增加數(shù)值計算穩(wěn)定性。
2 鰻鱺科魚類游動模型
2.1 魚體自由游動性能評價
在自由游動模型(self-propelled fish model)中,當(dāng)魚體從靜止開始自由游動時,通過擺動身體產(chǎn)生向前游動的推力,開始初始速度較小,推力大于阻力,魚體處于加速狀態(tài);當(dāng)魚體游動速度逐漸增大時,游動阻力也逐漸變大,直到與擺動產(chǎn)生的推力相平衡,達(dá)到穩(wěn)態(tài)游動狀態(tài)。魚類在自由游動時的控制方程為
式中,Mred為魚體約化質(zhì)量。通過沿長度方向線積分求解鰻鱺科魚體的二維約化質(zhì)量,為
通過沿長度方向二重積分,求解到鰻鱺科魚體的三維約化質(zhì)量為
魚體在自由游動狀態(tài)下,達(dá)到穩(wěn)態(tài)時所獲得的穩(wěn)態(tài)游動速度與流體雷諾數(shù)、魚體波動曲線以及魚體外形等存在密切關(guān)系。所以,在研究魚體自主游動性能之前,需要明確流體環(huán)境、推力以及推進(jìn)效率等定義:
(1)雷諾數(shù):魚體自由游動的流體雷諾數(shù)定義為L2(Tν),T為擺動周期;
(2)穩(wěn)態(tài)游動速度:在穩(wěn)態(tài)游動狀態(tài)下,魚體對應(yīng)的游動速度;
(3)平均推力:在穩(wěn)態(tài)游動狀態(tài)下,魚體在單位周期內(nèi)推力的平均值;
(4)游動效率:根據(jù)Lighthill細(xì)長體理論[16]計算魚類的游動效率,表達(dá)式為
此外,魚類游動效率也可用Froude效率ηF進(jìn)行評價,表達(dá)式為
2.2 算例設(shè)置
Carling和Kern等[5,8]前期研究定義了鰻鱺科魚類的擺動曲線,表達(dá)式為
鰻鱺科魚體二維算例計算域為50L×4.8L,寬度約為魚體最大寬度的7 倍,計算域?qū)?yīng)網(wǎng)格為2048×256。如圖3 所示,在魚體游動范圍內(nèi)加密網(wǎng)格以保證計算精度,在網(wǎng)格加密區(qū)內(nèi)流向方向網(wǎng)格尺寸Δx為0.02L,側(cè)向方向上的網(wǎng)格尺寸Δy為0.002L。三維魚游算例計算域為50L×5L×5L,對應(yīng)網(wǎng)格數(shù)為2048×160×160,魚體周圍加密網(wǎng)格尺寸為0.02L×0.005L×0.005L。魚體位于徑向和展向方向中心線上,從起始位置向前游動,流向、徑向和展向上邊界條件均為無滑移邊界條件。
3 鰻鱺科魚類游動性能分析
3.1 算例驗證
參考文獻(xiàn)[17-18],設(shè)置鰻鱺科魚體外形參數(shù)和魚體波曲線分別如式(5)和式(21)所示,流體雷諾數(shù)為7100。設(shè)置不同的計算網(wǎng)格數(shù)以及網(wǎng)格尺寸(見表1),研究網(wǎng)格數(shù)對魚體游動速度的影響。如圖4 所示,魚體由初始靜止?fàn)顟B(tài)逐漸加速,直到達(dá)到穩(wěn)定游動狀態(tài)。當(dāng)網(wǎng)格數(shù)為4096×288 時,魚體穩(wěn)態(tài)速度到達(dá)0.55 BL/s(body length/second,體長/秒),與算例IV 中網(wǎng)格數(shù)8192×352 的計算結(jié)果相一致。與文獻(xiàn)網(wǎng)格數(shù)對比,本文算例所需網(wǎng)格數(shù)約為原網(wǎng)格總數(shù)的1/5~1/10,計算量明顯減小。
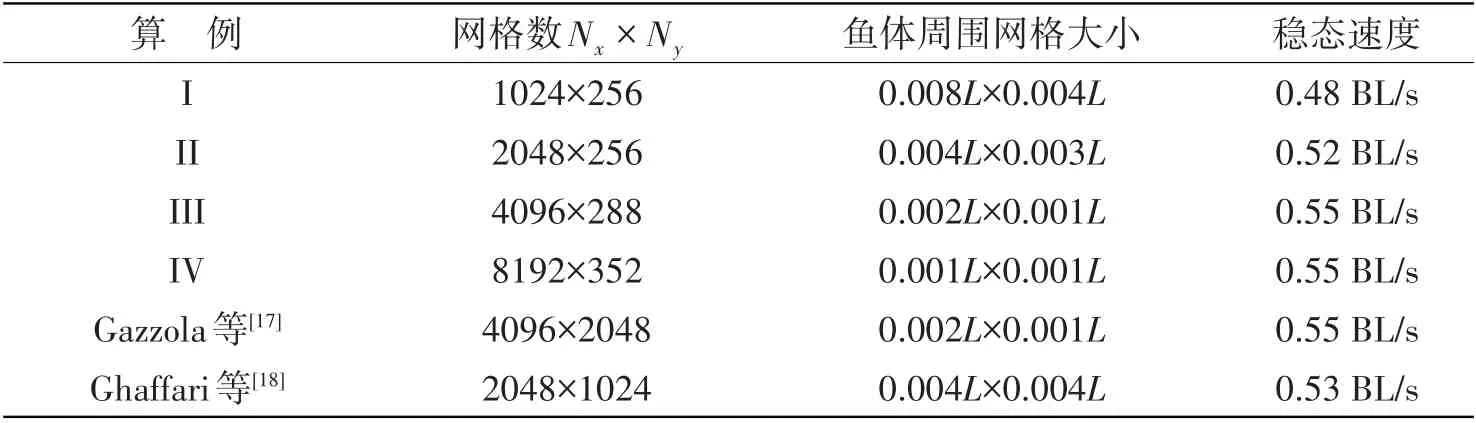
表1 鰻鱺科魚類自主游動二維算例結(jié)果對比Tab.1 Results comparisons of two-dimensional self-propelled anguilliform fish
在穩(wěn)定游動時,魚體游動速度會出現(xiàn)往復(fù)波動,主要原因在于單位擺動周期內(nèi)魚體尾跡會出現(xiàn)兩個反向的渦街結(jié)構(gòu),與尾鰭周期性擺動相對應(yīng)。如圖5(a)所示,二維魚體在往復(fù)擺動過程中會產(chǎn)生不同旋向的附著渦,并在游動過程中沿尾體迅速脫落,在尾跡形成交錯排列的反卡門渦街。在反卡門渦之間,尾跡區(qū)域會形成一系列連續(xù)射流,產(chǎn)生的反作用力會推動魚體向前游動。在相同的運(yùn)動學(xué)參數(shù)下,三維魚類尾跡出現(xiàn)雙列渦和發(fā)夾渦等尾渦結(jié)構(gòu),如圖5(b)所示(魚體尾跡渦街結(jié)構(gòu)的分析見文獻(xiàn)[19])。
3.2 魚體波參數(shù)對推進(jìn)性能影響分析
在鰻鱺科魚游模擬中,設(shè)置不同粘性的流體以研究魚類在不同環(huán)境中的游動性能。如表2所示,流體雷諾數(shù)從500變化到4000,魚類穩(wěn)態(tài)游動速度從0.14 BL/s增長到0.31 BL/s,游動效率也從60.89%增長到74.12%,而St數(shù)從1.23下降到0.55。這說明魚類在粘度較小的流體中會獲得較好的游動性能。在自然界中,魚類通常在雷諾數(shù)Re>104的流體環(huán)境中游動,流體的慣性力起主導(dǎo)作用,而粘性力可忽略不計。魚類游動對應(yīng)St數(shù)的范圍為0.25~0.4,該區(qū)間內(nèi)游動效率最優(yōu)。在表2 顯示的Re=4000 流體環(huán)境中,魚類游動St數(shù)達(dá)到0.55,該結(jié)果說明當(dāng)前流體的粘性遠(yuǎn)大于水的粘性。
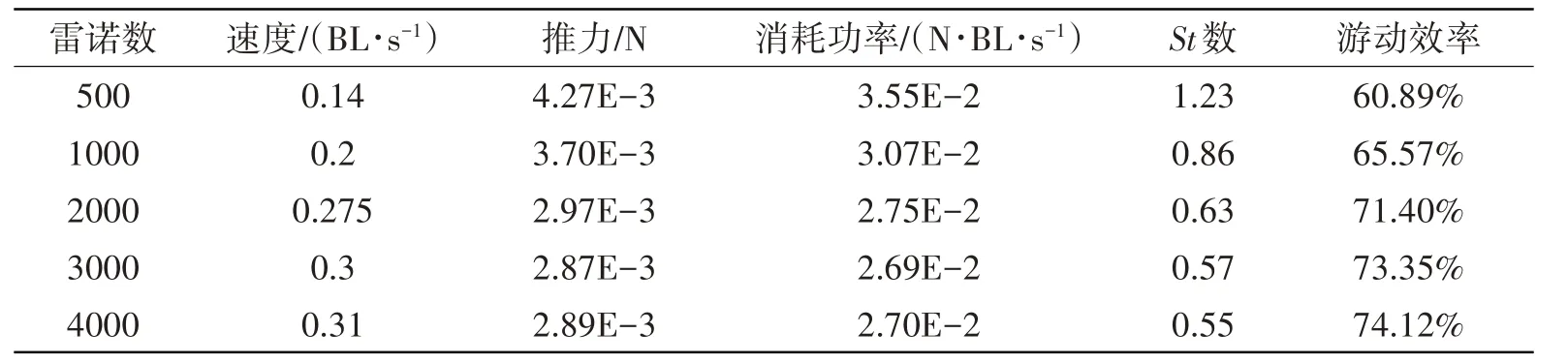
表2 雷諾數(shù)對鰻鱺科魚類游動性能的影響Tab.2 Effects of Reynolds number on swimming performance of anguilliform fish
在不同流體環(huán)境中,魚類的擺動曲線參數(shù)會對其推進(jìn)性能產(chǎn)生較大的影響。以自然界觀測的魚體擺幅為基準(zhǔn)成比例改變擺幅,分別選擇幅值調(diào)節(jié)系數(shù)為0.25、0.5、1.0、1.5 和2.5,分析不同擺動幅值下鰻鱺科魚體的游動性能。如表3 所示,當(dāng)魚類的擺動幅值調(diào)節(jié)系數(shù)小于1 時,鰻鱺科魚類的游動速度和推力均隨擺動幅值的增大而增大,對應(yīng)的游動效率也會得到提高。當(dāng)魚體擺動幅值調(diào)節(jié)系數(shù)為1.5和2.5時,雖然計算得到較大的游動速度和游動效率,但消耗功率明顯增加,不利于提高游動效率。在自然界中,魚類游動時擺幅基本維持不變[20],即擺幅調(diào)節(jié)系數(shù)不大于1。該計算結(jié)果與自然界中實(shí)驗觀測結(jié)論相吻合。

表3 鰻鱺科魚體擺動幅值系數(shù)對游動性能的影響Tab.3 Effects of amplitude coefficient on the swimming performance of anguilliform fish
魚體擺動曲線波數(shù)對游動性能的影響如表4所示。當(dāng)魚類擺動曲線波數(shù)為9時,鰻鱺科魚類可獲得最大游動速度(0.506 BL/s),游動效率達(dá)到最大值89.4%。該結(jié)果與鰻鱺科魚類在自然界進(jìn)化選擇的擺動曲線波數(shù)9.75相接近,這也說明本文模型能較好反映魚類擺動曲線對游動性能的影響。
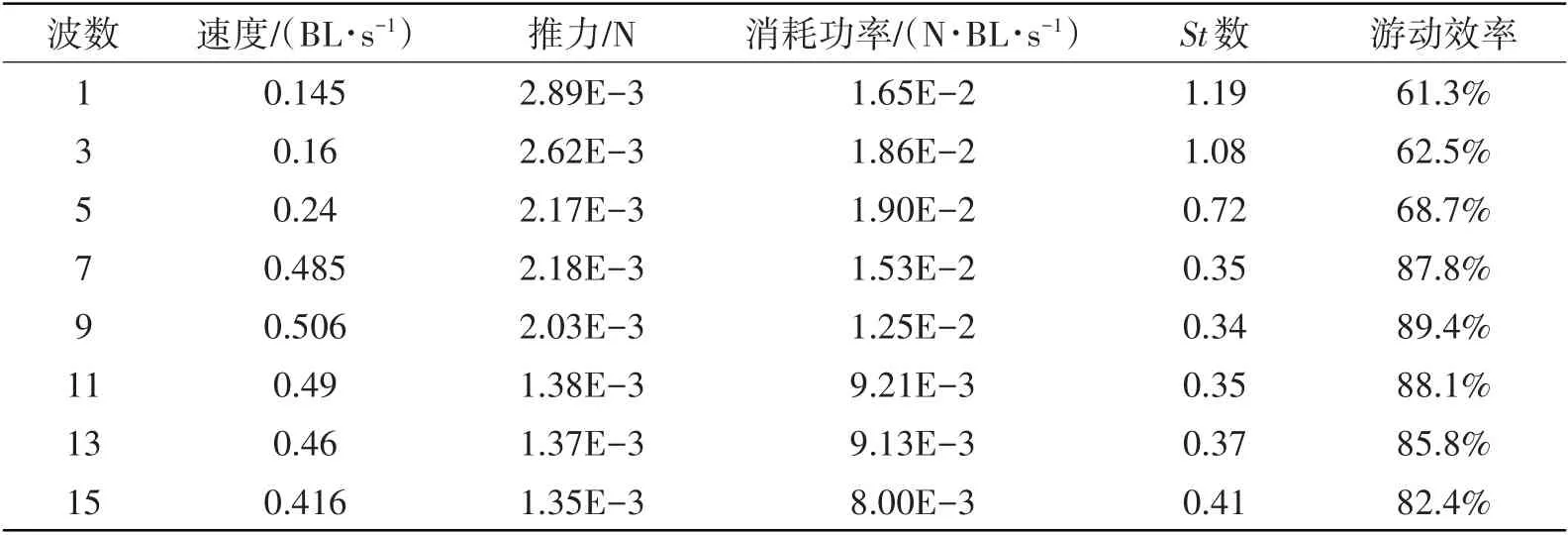
表4 鰻鱺科魚類擺動波數(shù)對游動性能的影響Tab.4 Effects of wave number on swimming performance of anguilliform fish
3.3 魚體外形與擺動曲線的匹配分析
在自然界中,魚體選擇不同外形和擺動曲線,為研究魚體外形和擺動曲線的匹配關(guān)系,本節(jié)設(shè)置兩類不同的算例,分別為:(1)保持鰻鱺科魚類的外形,研究不同擺動曲線對游動性能的影響;(2)保持鰻鱺科魚類的擺動曲線,研究不同外形對游動性能的影響。以鰻鱺科和鲹科魚體為研究對象,通過人為選擇不同外形和擺動曲線,研究了魚類在游動過程中的優(yōu)化選擇,為探索魚類快速高效游動機(jī)理的研究提供了依據(jù)。
3.3.1 魚類擺動曲線對游動性能影響分析
保持鰻鱺科魚體外形不變,設(shè)置兩個算例:
(1)Re=600,魚類采用鰻鱺科魚類的運(yùn)動學(xué)參數(shù),如式(21)所示;
(2)Re=600,魚類采用鲹科魚類的擺動曲線參數(shù),如式(22)所示。
當(dāng)雷諾數(shù)Re=600 相同時,當(dāng)鰻鱺科魚體在其自然選擇的運(yùn)動學(xué)參數(shù)下,游動速度為0.847 BL/s,游動效率為71.2%。但鰻鱺科魚類以鲹科魚類的運(yùn)動學(xué)參數(shù)運(yùn)動時,對應(yīng)的速度和效率均有所下降,對應(yīng)游動速度和游動效率分別為0.436 BL/s和59.9%,該結(jié)果與魚類自然選擇結(jié)果相一致。

表5 鰻鱺科魚類在不同運(yùn)動參數(shù)下的游動性能Tab.5 Swimming performance of anguilliform fish under different kinematic parameters
3.3.2 魚類外形對游動性能影響分析
鰻鱺科和鲹科魚類的幾何形狀差異較大,鰻鱺科魚體呈細(xì)長狀,而鲹科魚類為寬扁型。根據(jù)文獻(xiàn)[21],設(shè)鲹科魚類的橫截面為垂直于中性線的橢圓,橢圓的大小半徑分別為R(x)和r(x):
采用鰻鱺科魚類的運(yùn)動學(xué)參數(shù)(式(21)),魚類外形分別采用鰻鱺科和鲹科魚體外形,然后研究魚體外形對游動性能的影響。對比表6和表7,在Re=500的流體環(huán)境中,與鲹科魚類外形相比,鰻鱺科魚類外形魚類所對應(yīng)的游動速度提高了13.24%,游動效率提高2.3%。在不同流體環(huán)境中,當(dāng)魚體波動形式為鰻鱺科模式時,鰻鱺科細(xì)長體外形更容易實(shí)現(xiàn)快速高效的游動性能。隨著流體雷諾數(shù)的增加,魚類外形對游動性能的影響依然存在著較明顯差距,該結(jié)論證實(shí)了魚類在自然界中通過特定外形和獨(dú)特的魚類的擺動曲線相配合,可以獲得最優(yōu)的游動性能。
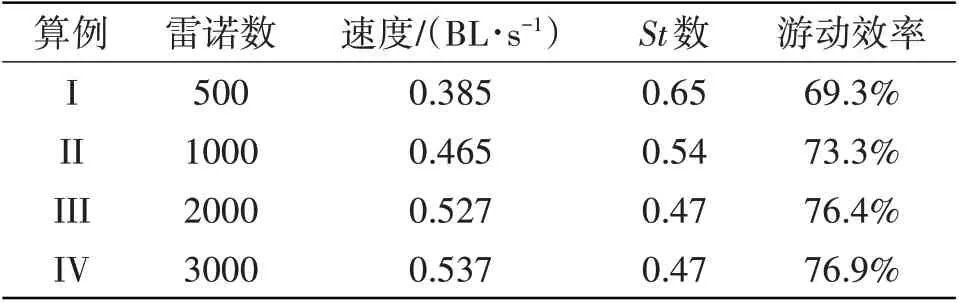
表6 保持鰻鱺科外形的鰻鱺科魚類游動性能Tab.6 Swimming performance of anguilliform fish with the shape of anguilliform fish
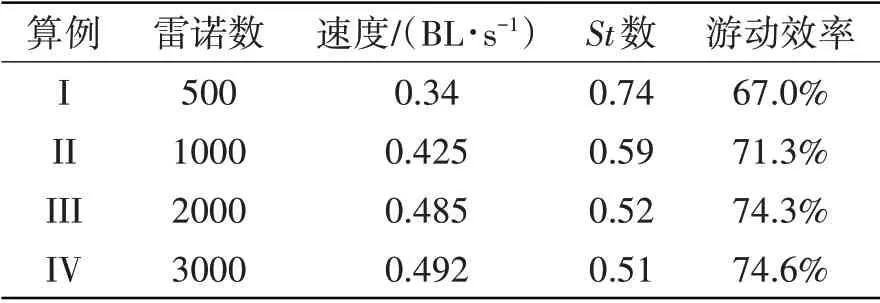
表7 具有鲹科外形的鰻鱺科魚類游動性能Tab.7 Swimming performance of anguilliform fish with the shape of carangiform fish
以雷諾數(shù)3000為例,魚類不同外形對應(yīng)的渦量分布如圖6所示,尾跡渦街結(jié)構(gòu)主要通過尾跡長度χ和尾跡寬度ψ來描述。鰻鱺科魚體外形渦街結(jié)構(gòu)的平均尾跡長度為0.294,尾跡寬度為0.123,而鲹科魚體外形對應(yīng)的渦街結(jié)構(gòu)平均尾跡長度和寬度分別為0.282 和0.109。結(jié)果表明,鰻鱺科魚類外形更容易將尾跡的渦街結(jié)構(gòu)長度和寬度進(jìn)行擴(kuò)展。結(jié)合渦動力學(xué)理論,該類型的渦街結(jié)構(gòu)產(chǎn)生更大的推力[22],與本文的數(shù)值結(jié)果相一致。
4 結(jié) 語
本文結(jié)合Level-set函數(shù)和浸入邊界法的優(yōu)勢,采用數(shù)值方法建立了鰻鱺科魚類的自由游動模型,根據(jù)Level-set 函數(shù)和重復(fù)初始化的過程來確定鰻鱺科魚體界面,由基于直接力法的浸入邊界法來決定魚體與流體之間的相互作用力。通過改變魚類的擺動曲線的頻率、幅值和波數(shù)來分別研究魚類在不同流體環(huán)境中的游動性能。通過設(shè)置不同魚類的外形和擺動曲線參數(shù),發(fā)現(xiàn)鰻鱺科魚類的游動性能依賴于魚類外形和擺動曲線參數(shù)的合理匹配。該研究對魚類在自然界的優(yōu)化選擇提供了理論解釋,也為通過控制魚類的擺動曲線參數(shù)來實(shí)現(xiàn)水下航行器快速高效的推進(jìn)性能提供指導(dǎo)。
