毫米波FMCW MIMO雷達三維點云成像方法
2022-10-26 02:07:20晉良念
雷達科學與技術 2022年5期
晉良念, 王 燃
(1. 桂林電子科技大學信息與通信學院, 廣西桂林 541004;2. 廣西無線寬帶通信與信號處理重點實驗室, 廣西桂林 541004)
0 引言
近年來,自動駕駛、智慧交通、區域監控以及安防等領域的需求飆升,這些領域的相關應用場景要求傳感器能夠探測環境中目標的空間三維信息。相比于其他感知環境的傳感器如相機、激光雷達來說,商業的毫米波雷達有著獨特的優勢。不僅因其大小適合安裝在汽車的各個位置,能很好地適應汽車和工業領域對雷達設備體積的要求,而且探測距離遠,對各種惡劣天氣環境的魯棒性強,在復雜工作環境下能正常運行。而毫米波FMCW MIMO雷達高分辨的3D點云成像技術將有助于提高上述應用中目標檢測、分類、預警等功能的效率與準確性。
現有毫米波FMCW MIMO雷達3D點云成像方法包括三維快速傅里葉變換(3D FFT)、快速傅里葉變換-二維多重信號分類(FFT-2D MUSIC)和三維多重信號分類(3D MUSIC)等算法。其中,3D FFT是一種基于快速傅里葉變換算法的三維參數估計方法。FFT-2D MUSIC方法利用FFT估計距離、2D MUSIC估計方位角和俯仰角,與3D FFT相比,提高了空間角分辨能力。3D MUSIC算法在此基礎上將2D MUSIC擴展到3D MUSIC,提出一種距離-多普勒-方位角聯合估計方法,它通過三維張量構造新的信號模型,并利用前向后向空間平滑技術對數據進行疊加和平滑,獲得了三維參數的高分辨。但是,汽車和工業毫米波雷達系統往往方位角的視場(FOV)很大,距離分辨率高,導致劃分的方位角網格數和距離單元數多。諸如上述結合MUSIC的點云成像方法,既需要已知源數量和大量的快照,又要對協方差矩陣的奇異值求解,以及聯合估計的多層循環搜索,都極大增加了算法復雜度,算法運行的時間往往成倍增加。為了滿足實時性的要求,TI公司提出了一種 FFT測距加Capon測角的三維點云成像方法,一方面利用Capon測角沒有特征值分解帶來的復雜運算,另一方面通過加入CFAR檢測算法,檢測存在目標的單元,來避免多維循環搜索,這種信號處理框架大大降低了方法運行的時間。
盡管如此,Capon算法的角分辨不足,因而為了改善到達角(DOA)估計的性能,文獻[10]提出一種基于漸近最小方差的稀疏迭代方法(SAMV)。該方法在1D角度上劃分網格,利用采樣數據協方差矩陣與真實協方差矩陣的差異,根據AMV準則,推導出網格功率的迭代公式,從而得到更好的角度譜,有著比Capon和MUSIC更佳的分辨能力。本文在SAMV的基礎上,將其擴展至2D,提出一種適用于毫米波FMCW MIMO雷達的三維點云成像方法。首先對差拍信號做FFT,得到1D距離像;然后在每個距離單元的水平方向上劃分方位角網格,構造過完備的方向矢量矩陣,從AMV準則的角度出發,得出網格功率的迭代求解公式,由此得到距離-方位角熱圖;接著對熱圖的兩個維度分別做1D CASO-CFAR,得到目標的距離和方位角單元;最后根據檢測出來的單元位置信息,在俯仰角上劃分網格,采用SAMV算法估計網格的信號功率,經過檢測得到俯仰角。相較于現有方法,該方法在天線數量受限和有限快拍的情況下,能明顯提高方位角和俯仰角上的分辨率。
1 信號模型
FMCW MIMO雷達系統模型如圖1所示,有3個發射陣元~和4個接收陣元~,其中和的間距為2(為雷達信號的波長),與和的間距均為,并向軸正方向平移2;到的陣元間距為2。為了方便后續的建模,按照文獻[11],將圖1的MIMO陣列結構等效為圖2的12個虛擬陣元收發共置來進行處理,對應的坐標位置矩陣=[,…,,…,]∈,其中=?+?,∈和∈分別是發射陣元與接收陣元的3D坐標矩陣。

圖1 MIMO陣列模型

圖2 等效虛擬陣列模型
MIMO陣列采用時分發射模式。以為例,假設在一個調頻周期內發射的信號為
()=exp[j(2π+π)],0≤≤
(1)
式中,為信號時間,為每個Chirp的調頻周期,為調頻斜率,為中心頻率。根據圖2,接收的回波信號可以表示為

(2)
式中,為目標的反射系數,為發射天線到接收天線的信號傳播時延,包括距離和角度時延,即

(3)
式中,為目標和原點的徑向距離,=[sincos,coscos,sin]為目標的單位方向矢量。中的和為目標的方位角和俯仰角,取值范圍為方位角和俯仰角的有效視場角和內,即∈(-2,2),∈(-2,2)。
將回波信號與發射信號進行混頻,得到差拍信號為

exp[j2π(+++

(4)
式中,平方項和二次項相對于其他項可以忽略,又因的值太小,exp[j2π()]項也可以忽略,由此改寫為
()=exp[j2π(·)]×
exp[j2π(2+2)]+
()
(5)
對()進行采樣得到離散采樣序列:


()
(6)
式中,為采樣速率,=1,2,…,為采樣點數。若將式(6)推廣到個目標,設目標距離分別為,,…,,所在的方位角和俯仰角分別為(,),(,),…,(,),則式(6)的信號模型可以進一步寫為


()
(7)



()
(8)
2 算法描述
為了從式(8)得到3D高分辨點云像,需經過一維距離像估計、距離-方位角熱圖生成、CFAR目標檢測和俯仰角估計等一系列的信號處理,具體流程如圖3所示。

圖3 三維點云成像方法流程框圖
2.1 一維距離像估計
如圖2所示,就第個虛擬陣元,先對第




=1,2,…,
(9)
2.2 距離-方位角熱圖生成


(10)




(11)



=1,…,,=1,…,
(12)

()=()+()
(13)

上述式(13)為用2D SAMV聯合方位角和俯仰角估計時的信號模型,將其用于方位角網格功率估計時,需令=0,而且等于1和2,等于1到4。將()重新組合,得到

(14)
()=()+()
(15)


(16)
式中,()=diag((),…,(),…,()),對應的()為方位角上第個網格上的信號功率,()為噪聲功率,()和()為待求的參數, 對協方差矩陣()矢量化,即
(())=(())=()
(17)
式中,()=[(),…,(),…,(),()],為系數矩陣,即=[(,0)?(,0),…,(,0)?(,0),…,(,0)?(,0),()],這里的?代表Kronecker積。對矩陣()的矢量表示可以看作未知的參數矢量()中元素的線性組合。由于Chirp數有限,可以得到采樣協方差矩陣為

(18)



(19)


(20)


(21)

(22)
式中,為迭代次數。根據Capon波束形成算法對網格功率的估計,有=1/,則式(21)、式(22)可改寫為

(23)

(24)
在上述迭代過程中,初始值可以通過周期圖法來求解,即

(25)

(26)

=[(1),…,(),…,()]∈×
(27)

2.3 CASO-CFAR檢測
將式(27)以距離維度和方位角維度分別送入CASO-CFAR檢測器,其中=[(),…,(),…,()],=[(1),…,(),…,()],對每個方位角網格上的所有距離單元做1D CASO-CFAR,檢測出存在目標的距離單元,再對距離單元處的所有方位角網格做1D CASO-CFAR,檢測出存在目標的距離-方位角網格單元(,d),得到對應的(,)。由于在應用中我們往往需要將距離較近的值能夠檢測出來,文獻[15]中表明,單元平均選小恒虛警檢測(CASO-CFAR)相對于單元平均恒虛警檢測(CA-CFAR),使得距離較近的目標檢測出來而不出現目標遮蔽的現象。具體處理結構如圖4所示。

圖4 CASO-CFAR處理結構圖
2.4 俯仰角估計
接下來,對檢測的距離-方位角網格單元(,d)進行俯仰角估計時,根據式(13),需令=,=d,且等于1到3,等于1到4,將()重新組合,得到

(28)
()=()+()
(29)


(30)

(31)

3 仿真與實驗結果分析
3.1 雷達參數設計
為了對近距離區域內人員等目標的3D位置參數進行探測,需要進行合理的毫米波雷達參數設計。雷達參數主要包括MIMO雷達天線數量及陣列設計、調頻起始頻率、調頻斜率、ADC采樣點數、ADC采樣率、工作波長和每幀的調頻周期數,這些參數由應用場景的最大測量距離、距離分辨率等指標來確定,以下指標分別滿足公式:
=×
(32)
(33)

(34)

(35)
雷達硬件支持的參數有上限,將其作為雷達參數設計的先決條件,包括發射功率決定的最大測量距離、最大的ADC采樣率與最小的ADC采樣率、最大的掃頻帶寬、最大的調頻斜率與最小的調頻斜率、水平及垂直方向最大視場和等。具體的參數設置如表1所示。

表1 雷達系統和目標參數
3.2 仿真結果分析
設置4個點目標,參數設置如表2所示。

表2 仿真目標三維參數
圖5和圖6分別為文獻[9]方法和本文方法生成的距離-方位角熱圖以及經過CASO-CFAR檢測的結果。從圖中可以看出,文獻[9]的方法已經無法在分辨出方位角上相差5°的目標1、2和目標3,只在目標1、2的方位角處有亮點,而方位角相差更大的目標4處也有明顯的亮點。同時該方法的旁瓣較高,導致經過CFAR檢測之后,真實距離-方位角單元的周圍許多單元也被檢測出來。相比之下,本文方法不僅在4個目標的真實方位角位置處均有明顯的亮點,而且旁瓣較低,真實位置周圍只有極少的單元被檢測出來。圖7和圖8分別為兩種方法在檢測單元處估計的俯仰角網格功率譜圖。從圖中可以看出,文獻[9]方法在所有檢測單元處都只有一個譜峰,無法分辨出不同俯仰角的目標1和2,而本文方法的俯仰角功率譜在不同的檢測單元上有兩個不同位置的亮點。圖9和圖10分別為兩種方法在空間直角坐標系中生成的3D點云像。從圖中可以看出,文獻[9]方法生成的點云像只能分辨出兩個目標,而本文方法4個目標的點云都很清晰分辨出來,成像效果很好,只有目標4的俯仰角估計有5°的偏移。由此可見,相比較文獻[9]的方法,本文提出的方法不僅在方位角上獲得了更好的分辨率,而且在只有兩排天線的條件下,俯仰角上依然可以得到一定的分辨率。

(a) 距離-方位角熱圖

(a) 距離-方位角熱圖

圖7 文獻[9]方法生成的俯仰網格功率譜圖

圖8 本文方法生成的俯仰網格功率譜圖

圖9 文獻[9]方法生成的3D點云像

圖10 本文方法生成的3D點云像
3.3 實測數據處理結果
實驗所采用雷達系統由TI(德州儀器)公司的毫米波雷達IWR6843ISK評估板卡、毫米波傳感器承載卡平臺MMWAVEICBOOST和數據采集卡DCA1000組成。評估板卡可以設置雷達系統參數,天線系統如圖1所示,將差頻信號在設置的采樣率下進行I/Q采樣,之后將采樣好的信號通過工業載板傳輸給DCA1000,DCA1000將處理好的差頻采樣復信號打包成二進制文件通過網口傳輸給電腦。
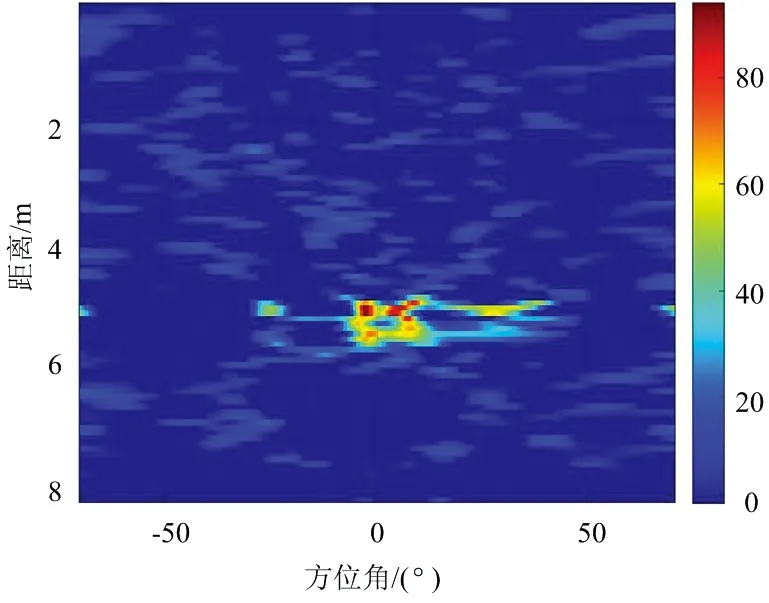
實驗時的場景如圖11所示,在距離雷達5 m處的兩個人體目標,人體目標的高度大約為1.7 m,人體的寬度大約為0.5 m,厚度大約為0.2 m,兩人相距為1 m,雷達的高度為1 m,圖12和圖13分別為兩種方法生成的距離方位熱圖及CFAR檢測結果。從圖中可以看出,文獻[9]中的方法,已無法分辨在方位角上相差5°的兩個人體目標,而本文方法依然能夠清晰地分辨出兩個目標。圖14和圖15分別為兩種方法在檢測單元處估計出來的俯仰角網格功率譜圖。從圖中可以看出,文獻[9]方法由于Capon測角算法的分辨率有限,且雷達在俯仰維上只有兩排天線,無法有效地估計目標所在的俯仰角范圍,而本文方法依然在目標的俯仰角范圍有明顯的亮斑。圖16和圖17分別為兩種方法的三維點云成像結果。從圖中可以看出,文獻[9]方法只能分辨出一個目標的點云像,且因俯仰角上分辨率很低,只能取峰值位置,導致點云成像結果和目標輪廓相差很大。而本文方法能清晰地生成兩個目標的點云,同時由于SAMV方法估計出來的是網格的真實功率,經過檢測算法后,三維點云結果和目標的輪廓十分相似。

圖11 實驗場景

(a) 距離-方位角熱圖
(a) 距離-方位角熱圖

圖14 文獻[9]方法生成的俯仰網格功率譜圖

圖15 本文方法生成的俯仰網格功率譜圖

圖16 文獻[9]方法生成的3D點云像

圖17 本文方法生成的3D點云像
4 結束語
本文提出一種毫米波FMCW MIMO雷達高分辨三維點云成像方法,通過毫米波雷達的大帶寬,得到高分辨的距離信息,引入SAMV方法,提升雷達的測角能力,結合CASO-CFAR算法,減少點云成像的時間。通過仿真和實驗結果表明,相對于現有方法,該方法即使在天線數目有限的商業毫米波雷達上,依然有著更高的分辨率,兼顧了實時性的要求。本方法生成的近距離人體目標三維點云像,點云輪廓更加清晰、準確,便于后續基于點云的目標分類、姿勢識別和計數等雷達應用的開發。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
