基于改進型神經網絡的臭氧發生器模型研究
2022-10-25 11:59:22翟維楓黃理郵孫德輝
計算機仿真 2022年9期
翟維楓,黃理郵,孫德輝,董 哲
(北方工業大學電氣與控制工程學院,北京100144)
1 引言
臭氧(O)是一種綠色環保型的強氧化劑和殺菌劑,得益于其優良的化學特性被廣泛應用在污水處理、自來水消毒、食品加工等領域。臭氧分子易分解,需要現場生產使用。目前制備臭氧的方法有多種,有電化學法、紫外線照射法等,在工業應用上,主要使用介質阻擋放電法(Dielectric barrier discharge,DBD)生產臭氧。基于當前臭氧廣闊的應用前景以及巨大的需求量,提升臭氧技術具有十分重要的意義。
DBD型臭氧發生器得到廣泛使用以來,由于其實際生產效率與其理論計算值還存在較大差距,臭氧的產率和能耗問題成為當前眾多學者研究的熱點。魏俊等人驗證了在介質阻擋的放電間隙中填充床介質可以提升臭氧的濃度及能量效率;周偉等人采用并聯電抗器無功補償的方法降低了系統的溫升而提升了系統電源的性能;馮衛強等人提出雙極性脈沖電源較傳統交流電源對于產生的臭氧體積分子和能量密度有明顯提高;任杰等人設計了以STM32單片機為主控制器的臭氧發生器數字電源控制系統,并基于此實現對系統輸出功率的閉環控制;上述方法從放電室的結構和系統的電源上進行了改進從而優化了臭氧發生器的性能。趙磊等人結合了數據挖掘技術對臭氧發生器系統的故障進行預測,從而基于預測結果調整電源諧振頻率進行系統閉環控制。后者設計了以STM32單片機為主控制器的臭氧發生器數字電源控制系統,并基于此實現對系統輸出功率的閉環控制。以上文獻主要從臭氧發生器系統其中的一方面進行研究改進,并沒有研究出一個對臭氧發生過程的精確模型,而DBD型臭氧發生器生產臭氧過程具有高度的復雜性和非線性,很容易受到多種因素的制約,導致臭氧生產效率較低,獲取確定的系統輸入輸出關系才能實施更好地控制。研究旨在綜合各個影響因子獲取系統的輸入輸出模型,并實現模型的在線更新,結合模型對系統精確控制實現高效的臭氧生產。
2 DBD板式臭氧發生器原理
本文使用的DBD臭氧發生器為板式結構,其結構原理圖見圖1。生產臭氧的原理是在放電室電極兩端施加高頻高壓交流電源,電極間插入絕緣介質,氣隙中形成電場使得氣體中產生電暈,電暈中的自由高能電子電離分解氧氣分子,氧原子與氧氣分子經碰撞聚合產生臭氧分子。

圖1 板式臭氧發生器結構原理圖
DBD板式臭氧發生器是一種復雜的非線性容性負載,其電路結構可以根據放電特性將其過程等效為放電和非放電兩種電路,可見,負載特性在工作時是動態變化的。生成臭氧濃度的大小與放電室的放電功率息息相關,對于介質阻擋放電的功率可使用式(1)描述

(1)
式中:為電源工作頻率,是供電電壓峰值,為放電電壓,和分別是放電室等效的介質電容和氣隙電容。介質電容大小與電極材料、放電室材質等因素相關,后者則主要受到氧氣流量、壓力、溫度、介質材料、介質間隙等因素的影響。由于電極、放電室材料和間隙等參數固定,本文將氧氣流量、溫度等外在因素作為系統模型的輸入變量。
3 臭氧濃度預測模型建立
3.1 GA-BP模型
BP神經網絡是最典型的多層前饋神經網絡,算法原理是信號由輸入層經隱藏層再到輸出層,利用誤差的反向傳播調整網絡的參數,其結構具有很強的非線性映射能力,同時兼備極強的自學能力和魯棒性能,在人工神經網絡領域有廣泛、成熟的應用。BP神經網絡也存在不足,諸如固定的學習率導致訓練速度慢,易于陷入局部最小值,設計其結構只能依靠經驗和實際應用等。而對于臭氧濃度預測模型,系統復雜而且數據量多,希望模型的訓練時間得到縮短,模型準確率能夠提高,針對這些問題,目前遺傳算法優化BP神經網絡是最常用、很有成效的做法,遺傳算法擁有良好的全局尋優能力,可自適應地調整搜索方向,能夠快速求解最優的參數。本文采用GA算法與BP神經網絡結合的方式提高建模速度和準確度,其算法流程圖如圖2所示。

圖2 GA-BP算法流程圖
3.2 BP神經網絡實現過程
確定BP神經網絡模型的拓撲結構,選取影響板式臭氧發生器生成臭氧的典型因素作為輸入層的神經元,分別是放電室溫度、氧氣壓力、氧氣流量、電源電壓和電源頻率。臭氧濃度的大小是衡量臭氧發生器制造能力的指標,因此選其作為神經網絡的輸出神經元,根據輸入輸出建立映射模型,圖3為設計的BP神經網絡的拓撲結構。
3.3 BP神經網絡實現過程
確定BP神經網絡模型的拓撲結構,選取影響板式臭氧發生器生成臭氧的典型因素作為輸入層的神經元,分別是放電室溫度、氧氣壓力、氧氣流量、電源電壓和電源頻率。臭氧濃度的大小是衡量臭氧發生器制造能力的指標,因此選其作為神經網絡的輸出神經元,根據輸入輸出建立映射模型,圖3為設計的BP神經網絡的拓撲結構。
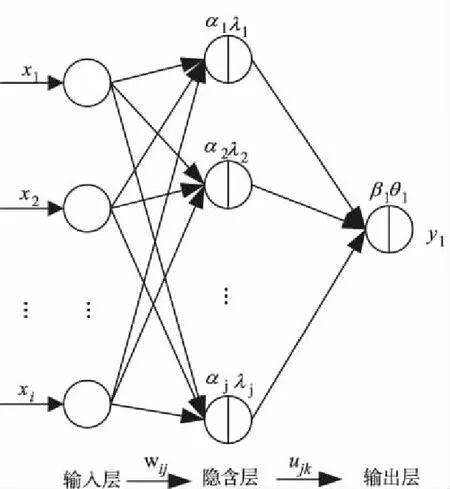
圖3 BP神經網絡拓撲結構
其中,輸入層神經元等于5,輸出層神經元個數等于1,隱含層的神經元個數根據經驗式(2)獲取:

(2)
式中:為1到10的整數。結合實驗測試效果,選取等于10。即神經網絡模型結構為5-10-1型。考慮到輸入數據之間數值差距比較大,同時避免傳遞函數出現飽和,對參與訓練的數據樣本進行對歸一化十分有必要,模型訓練前對樣本數據進行歸一化至[0,1]區間,在獲取預測值后再將其反歸一化。選取均方根誤差(Root Mean Square Error,RMSE)和平均絕對誤差(Mean Absolute Error,MAE)作為檢驗模型準確的標準,如下式(3)和式(4)所示

(3)
(4)
式中:為數據集的個數,為模型預測輸出,為期望輸出值。
3.4 遺傳算法優化過程
神經網絡優化的思路是使用遺傳算法來尋優BP算法中的權值和閾值。主要有兩個部分組成,初始種群和種群優化,種群中的每個個體包含BP神經網絡中的權值和閾值,通過該個體輸出的誤差來判定個體的優越性,通過種群進化也就是選擇,突變,交叉,然后留下優的品種,淘汰劣的品種,進而經過多次迭代,層間的連接權值與神經元的閾值表現更高的優越性,從而達到訓練目的,避免了神經網絡陷入局部最小,可以使得BP運算效率更高,獲取更精確的預測值。實現過程初始種群的形成以及種群進化兩部分。首先對初始種群的每個個體進行編碼,編碼方式選擇能夠使遺傳算法具有更好的搜索能力的實數編碼方式,適應度函數為簡單的排序函數,網絡預測誤差作為函數輸入,即為適應度值,然后依次進行選擇、交叉、變異過程。根據圖3所示的神經網絡結構,算法的初始參數設置如表1所示。

表1 遺傳算法初始參數設置
4 模型在線更新機制
通過2節所述方法訓練得到的模型為離線模型,模型的準確率取決于訓練樣本的質量和覆蓋率。而隨著系統長時間的運行,建模樣本集未覆蓋的新數據的出現會造成模型預測結果的準確率下降。同時,根據式(1)可知,系統的環境參數波動會導致等效電容C和C的變化,進而使實際物理模型發生變化。其同樣會導致原始模型的預測與系統實際輸出存在較大的偏差。因此,在使用盡量充分的實驗數據集建立模型后,保存至模型庫中,模型的更新通過實時運行數據對模型庫遍歷不斷測試模型,選取模型的輸出與實際臭氧濃度的絕對誤差作為模型發生變化的評估指標,當誤差滿足當前設定的范圍時,則繼續下一步的控制。反之將該組數據進行提取保存。當提取的數據滿足設定的數量時,將其作為樣本再次訓練出新的模型,將其與原始模型進行融合,更新整個模型庫,從而滿足系統實際的變化。在線更新模型的流程圖如圖4所示。
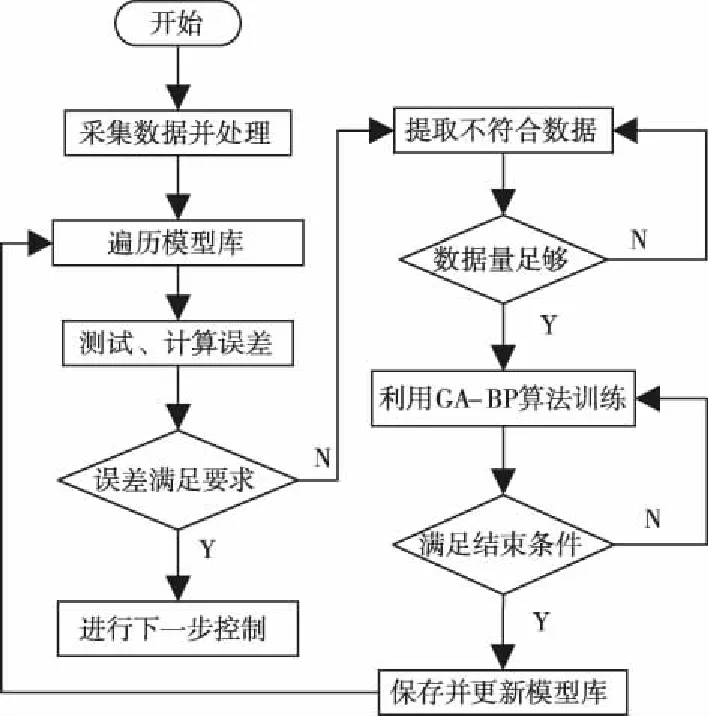
圖4 在線更新模型流程圖
5 實驗結果與分析GA-BP模型的準確性驗證
算法實驗主要分為兩部分,即模型訓練、模型測試。首先選取34560組數據作為模型訓練樣本,使用GA-BP方法和未優化的BP神經網絡方法分別進行訓練,設定算法學習率為0.1,均方根誤差設為0.01。其次從測試數據的預測結果分析模型的準確性和可行性,選擇3000組新的實驗數據作為模型測試樣本。訓練達到要求后,保存模型,然后調用模型進行測試,選取部分預測結果如圖5所示。

圖5 GA-BP與BP兩種方法的預測結果
從圖5可直觀的看出,帶有陰影圖使用GA-BP方法獲得的預測結果與實際的臭氧濃度值基本一致,經計算平均絕對誤差在3.3左右,與白色柱狀圖未優化的BP方法相比,模型表現出更好的映射能力。使用傳統的BP神經網絡方法建立的模型在平均絕對誤差、和最大絕對誤差都比使用GA-BP方法建立模型的更高。另外,在訓練效率方面,相同的條件下,BP方法需要更多的訓練次數以及更多的時間才能達到要求,反觀GA-BP方法訓練模型效率更高,只有更加快速的獲取相對準確的模型才能為進一步的在線更新打下基礎。
5.1 在線模型與離線模型的預測對比
保持系統運行,將每一組實驗數據經過原始模型計算出臭氧濃度預測值,與實際值比較算出誤差,把誤差不滿足條件的數據提取后保存至指定文件中,當數據量足夠時,利用提取的數據使用2.1節所述的方法再次訓練新的模型,訓練結束后與原始模型融合,更新模型庫后,選擇1000組新的實驗數據樣本進行測試。同時,使用相同的數據樣本對未加入模型庫的原始模型進行了測試對比實驗,如圖6所示。
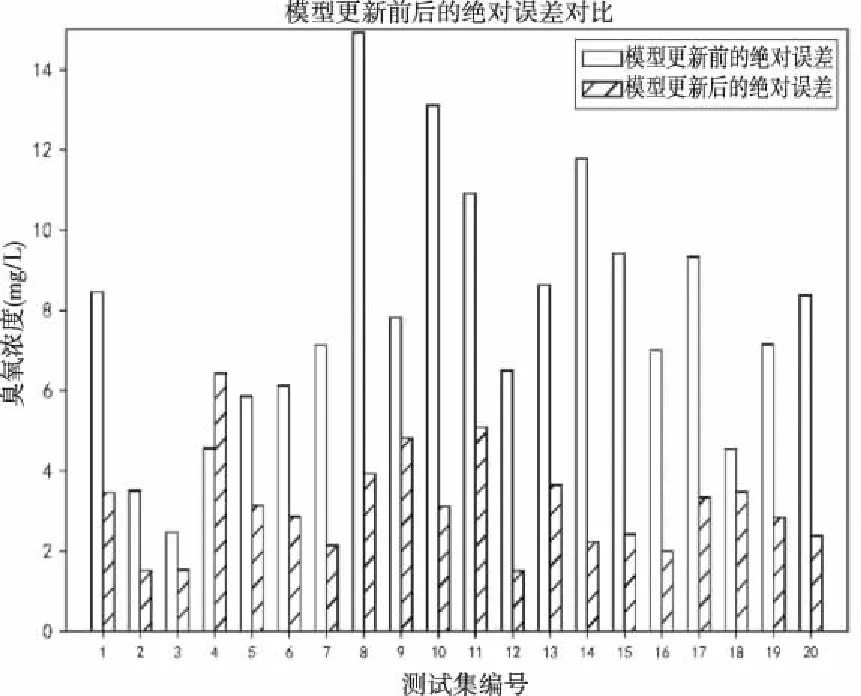
圖6 模型更新前后誤差對比圖
如圖,可以看到隨著系統的運行,原始的離線模型尚未加入更新機制時,部分的預測結果與實際值出現較大的偏差,整體的預測精度從直觀的結果相較于首次測試時更低,可見,原始數據訓練得出的離線模型準確率雖然較高,但是在實際運行過程中,當輸入數據不在訓練樣本覆蓋下、或者在系統非線型嚴重的區域,仍然會導致模型預測準確率下降的情況。更新后的模型預測值與實際值更加接近,表現更好的擬合能力。而本文提出的在線更新模型的方法,彌補了離線模型的不足,提高了預測的準確率,也更符合實際應用。
6 結論
本文通過將遺傳算法與BP神經網絡結合起來對DBD板式臭氧發生器系統建立模型,提高模型的收斂速度與預測精度,并針對DBD板式臭氧發生系統的實際運行特點,提出模型在線更新方案。結果驗證了GA-BP模型具有更好的預測能力,模型良好的非線性擬合能力有效的解決了臭氧發生系統的輸入輸出描述問題,結合在線更新機制,有效地提升了臭氧系統模型的準確率,同時還能實時跟蹤系統的變化規律。這將會使得后續對系統的閉環控制提供更好的解決方案,從而能夠有效提高臭氧生產的效率。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
